
Vehicular Edge-Computing Framework for Making Use of Parking and Charging Electric Vehicles

Abstract
:1. Introduction
- (1)
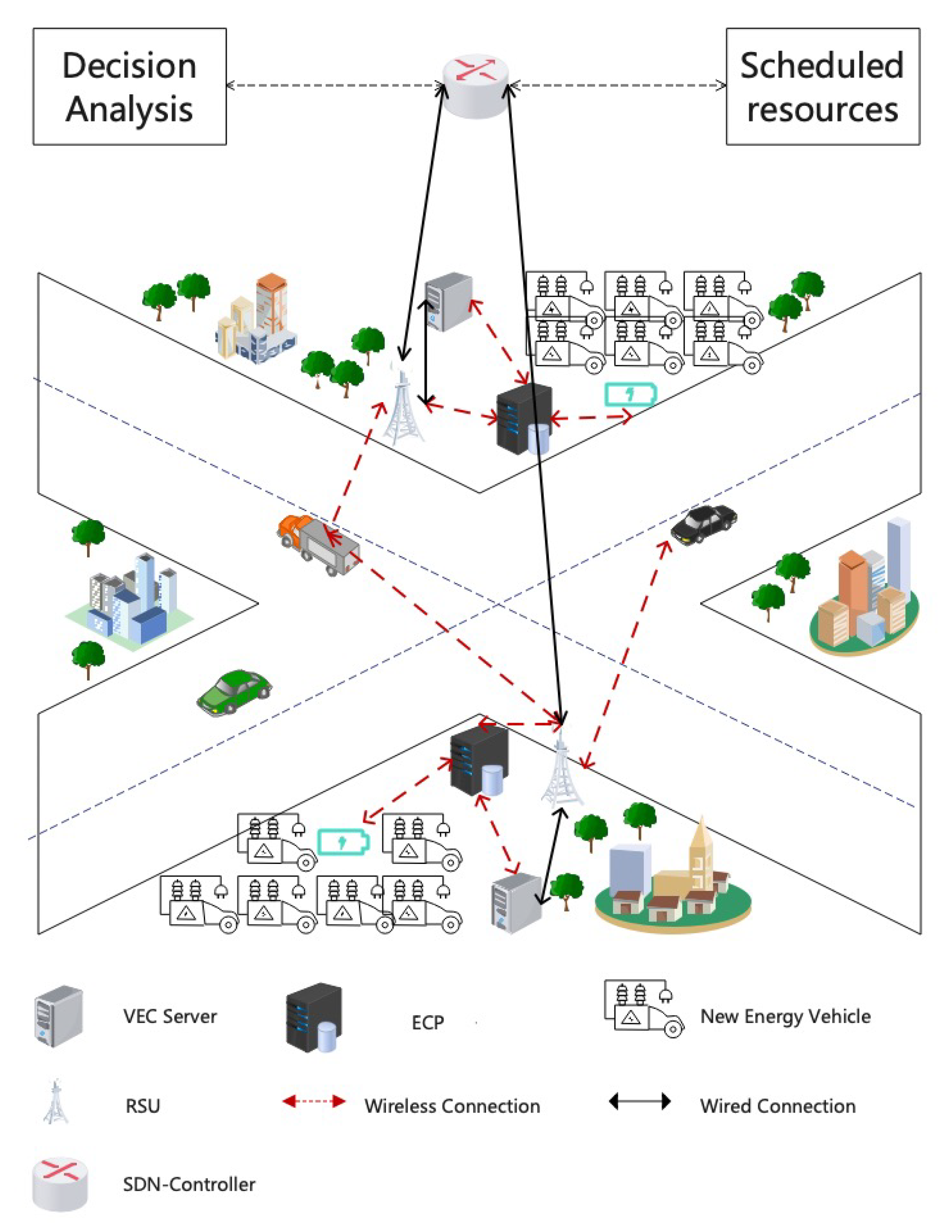
- We propose a VEC framework that uses electric vehicles in parking lots to assist edge servers in processing computational tasks. An edge crowdsourcing platform (ECP) is built to manage and integrate the idle computational resources of electric vehicles in parking lots, so that it can provide computational services for requesting vehicles.
- (2)
- To maximize the utilities of all participants in VEC, based on the Stackelberg game, we analyze the interactions among the requesting vehicles, the edge server, and the ECP, and theoretically prove the existence of a Nash equilibrium for this Stackelberg game. Then, a game strategy-solving algorithm based on a genetic algorithm is proposed to find the optimal strategies for the edge server and the ECP.
2. Related Work
3. System Model and Definitions
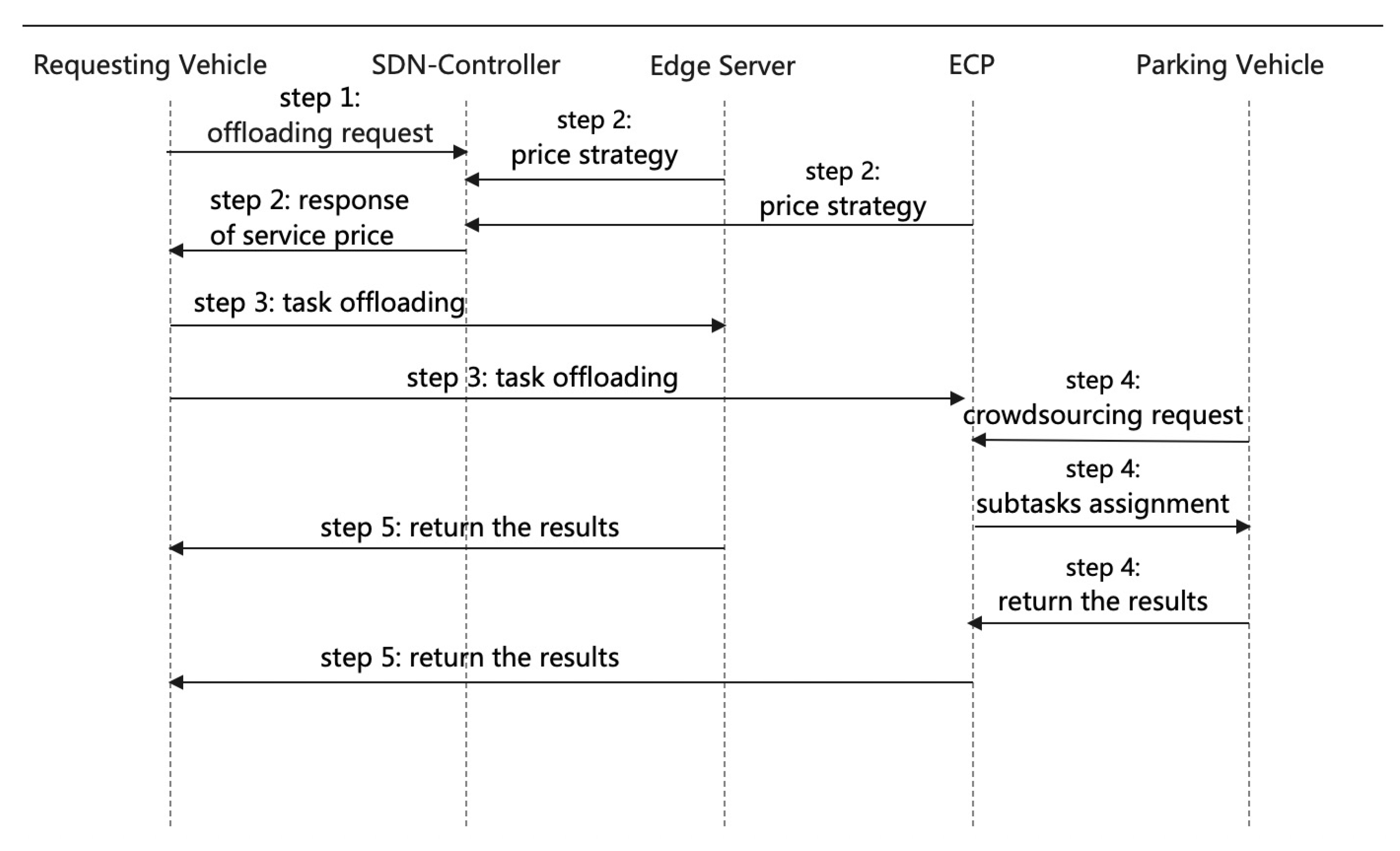
3.1. System Model
3.2. Delay and Energy Consumption Model
3.3. Utility Function for Requesting Vehicle
3.4. Utility Function for Edge Server
3.5. Utility Function for ECP
3.6. Price Function for Parking Vehicle
4. Problem Description and Optimal Solution
4.1. Problem Description
4.2. Task Offloading Analysis Based on Starkelberg Game
4.2.1. Second Stage Starkelberg Game
4.2.2. First Stage Starkelberg Game
| Algorithm 1 GSA (Game Strategy Algorithm) |
|
5. Simulations
5.1. Simulation Parameters
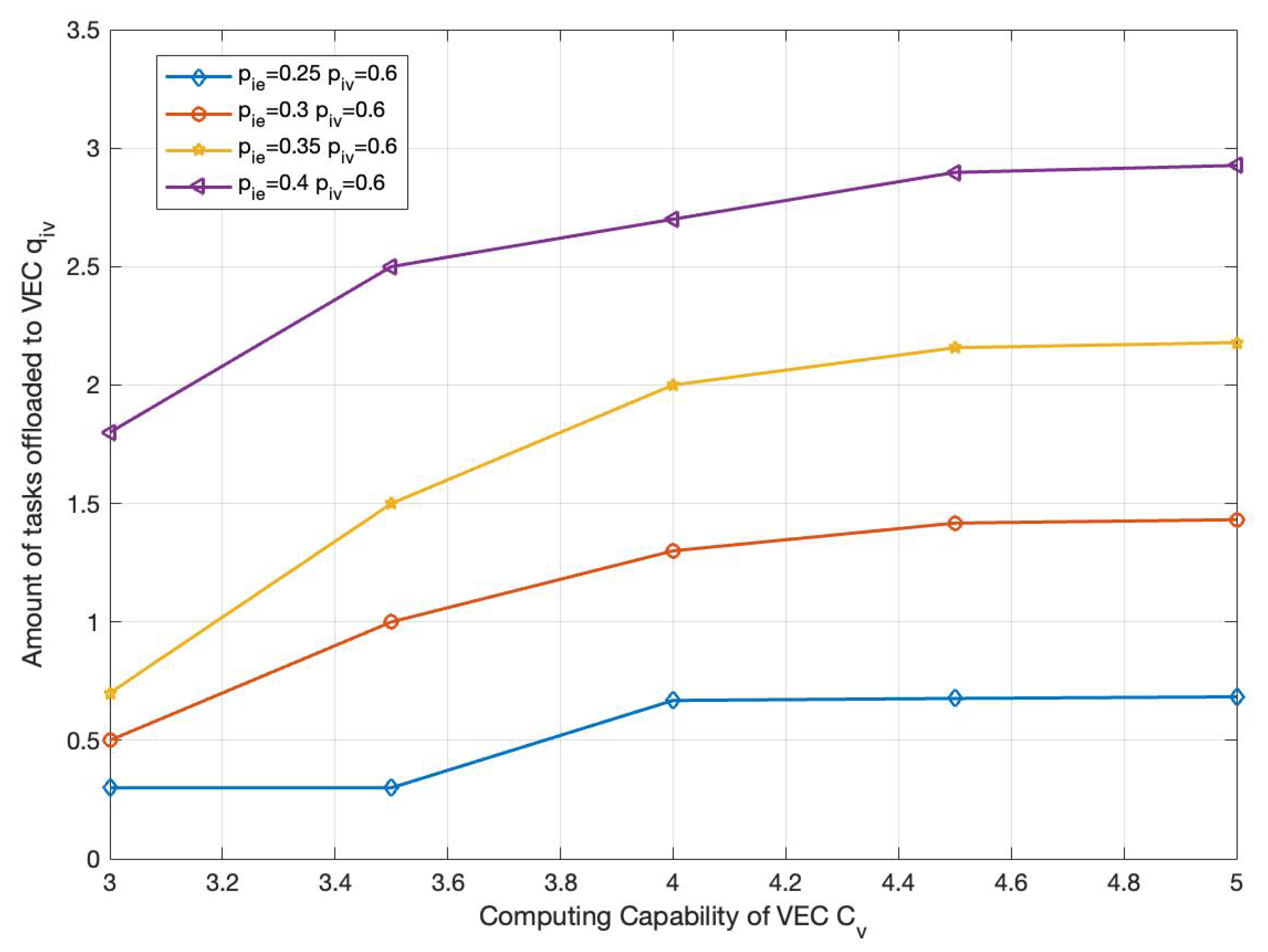
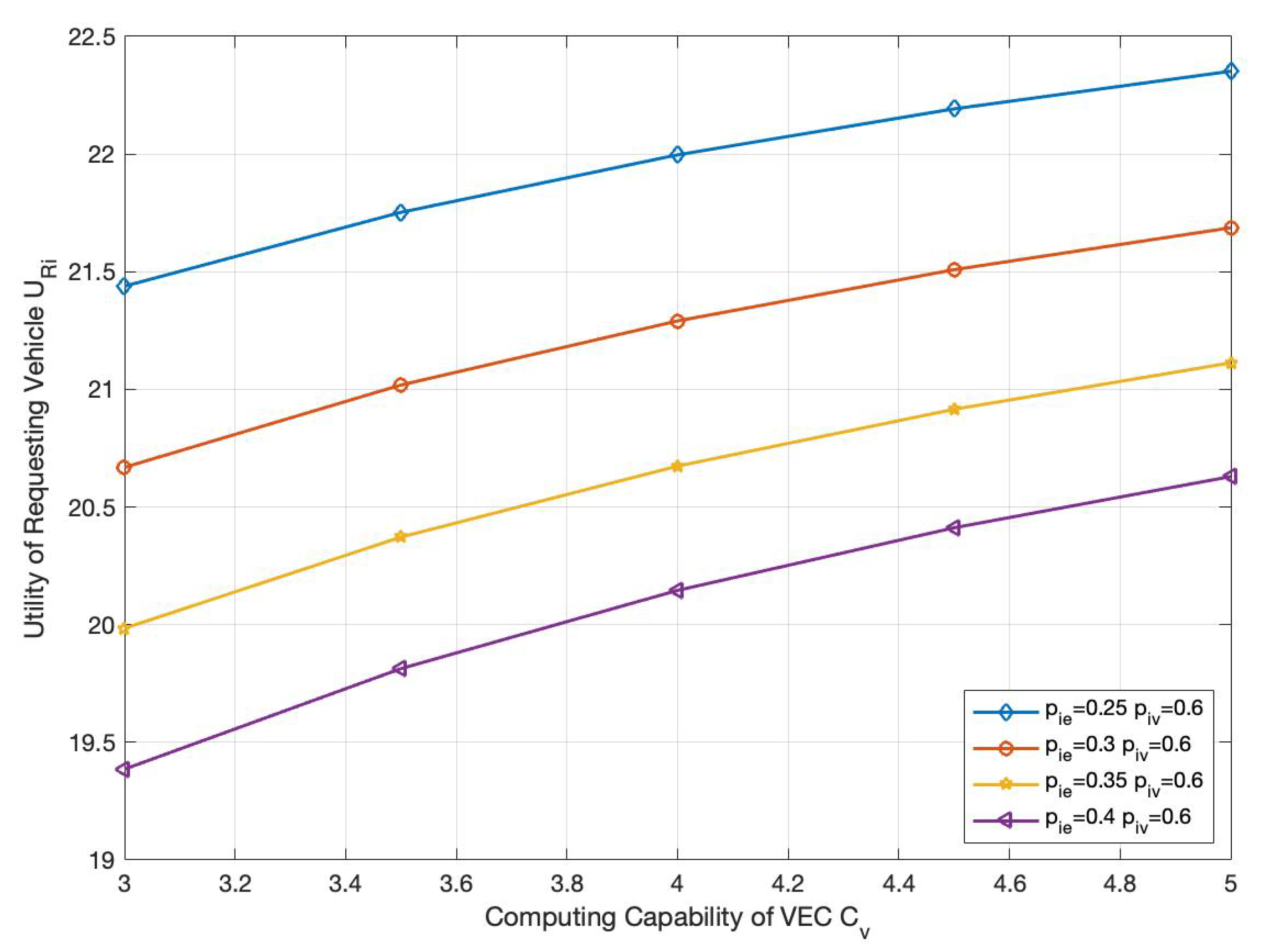
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yuan, S.; Fan, Y.; Cai, Y. A Survey on Computation Offloading for Vehicular Edge Computing. In Proceedings of the 2019 7th International Conference on Information Technology: IoT and Smart City, Shanghai China, 20–23 December 2019; ACM: Shanghai, China, 2019; pp. 107–112. [Google Scholar] [CrossRef]
- Zeng, F.; Chen, Q.; Meng, L.; Wu, J. Volunteer Assisted Collaborative Offloading and Resource Allocation in Vehicular Edge Computing. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3247–3257. [Google Scholar] [CrossRef]
- Zhang, K.; Mao, Y.; Leng, S.; Maharjan, S.; Zhang, Y. Optimal delay constrained offloading for vehicular edge computing networks. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; IEEE: Paris, France, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Li, C.; Wang, S.; Huang, X.; Li, X.; Yu, R.; Zhao, F. Parked Vehicular Computing for Energy-Efficient Internet of Vehicles: A Contract Theoretic Approach. IEEE Internet Things J. 2019, 6, 6079–6088. [Google Scholar] [CrossRef]
- Su, Z.; Xu, Q.; Hui, Y.; Wen, M.; Guo, S. A Game Theoretic Approach to Parked Vehicle Assisted Content Delivery in Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2017, 66, 6461–6474. [Google Scholar] [CrossRef]
- Du, J.; Yu, F.R.; Chu, X.; Feng, J.; Lu, G. Computation Offloading and Resource Allocation in Vehicular Networks Based on Dual-Side Cost Minimization. IEEE Trans. Veh. Technol. 2019, 68, 1079–1092. [Google Scholar] [CrossRef]
- Ku, Y.J.; Baidya, S.; Dey, S. Adaptive Computation Partitioning and Offloading in Real-Time Sustainable Vehicular Edge Computing. IEEE Trans. Veh. Technol. 2021, 70, 13221–13237. [Google Scholar] [CrossRef]
- Nazar, K.; Saeed, Y.; Ali, A.; Algarni, A.D.; Soliman, N.F.; Ateya, A.A.; Muthanna, M.S.A.; Jamil, F. Towards Intelligent Zone-Based Content Pre-Caching Approach in VANET for Congestion Control. Sensors 2022, 22, 9157. [Google Scholar] [CrossRef] [PubMed]
- Dai, S.; Li Wang, M.; Gao, Z.; Huang, L.; Du, X.; Guizani, M. An Adaptive Computation Offloading Mechanism for Mobile Health Applications. IEEE Trans. Veh. Technol. 2020, 69, 998–1007. [Google Scholar] [CrossRef]
- Li, C.; Liu, F.; Wang, B.; Philip Chen, C.L.; Tang, X.; Jiang, J.; Liu, J. Dependency-Aware Vehicular Task Scheduling Policy for Tracking Service VEC Networks. IEEE Trans. Intell. Veh. 2022, 1–15. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, S.; Zhao, Q.; Du, S.; Zhou, A.; Ma, X.; Yang, F. Dependency-Aware Task Scheduling in Vehicular Edge Computing. IEEE Internet Things J. 2020, 7, 4961–4971. [Google Scholar] [CrossRef]
- Luo, Q.; Li, C.; Luan, T.H.; Shi, W. Collaborative Data Scheduling for Vehicular Edge Computing via Deep Reinforcement Learning. IEEE Internet Things J. 2020, 7, 9637–9650. [Google Scholar] [CrossRef]
- Hessel, M.; Modayil, J.; van Hasselt, H.; Schaul, T.; Ostrovski, G.; Dabney, W.; Horgan, D.; Piot, B.; Azar, M.; Silver, D. Rainbow: Combining Improvements in Deep Reinforcement Learning. arXiv 2017, arXiv:1710.02298. [Google Scholar] [CrossRef]
- Ning, Z.; Li, Y.; Dong, P.; Wang, X.; Obaidat, M.S.; Hu, X.; Guo, L.; Guo, Y.; Huang, J.; Hu, B. When Deep Reinforcement Learning Meets 5G-Enabled Vehicular Networks: A Distributed Offloading Framework for Traffic Big Data. IEEE Trans. Ind. Inf. 2020, 16, 1352–1361. [Google Scholar] [CrossRef]
- Jang, Y.; Na, J.; Jeong, S.; Kang, J. Energy-Efficient Task Offloading for Vehicular Edge Computing: Joint Optimization of Offloading and Bit Allocation. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; IEEE: Antwerp, Belgium, 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Zhou, H.; Jiang, K.; Liu, X.; Li, X.; Leung, V.C.M. Deep Reinforcement Learning for Energy-Efficient Computation Offloading in Mobile-Edge Computing. IEEE Internet Things J. 2022, 9, 1517–1530. [Google Scholar] [CrossRef]
- Kumar, A.; Dadheech, P.; Chaudhary, U. Energy Conservation in WSN: A Review of Current Techniques. In Proceedings of the 2020 3rd International Conference on Emerging Technologies in Computer Engineering: Machine Learning and Internet of Things (ICETCE), Jaipur, India, 7–8 February 2020; IEEE: Jaipur, India, 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Shi, J.; Du, J.; Wang, J.; Yuan, J. Distributed V2V Computation Offloading Based on Dynamic Pricing Using Deep Reinforcement Learning. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Republic of Korea, 25–28 May 2020; IEEE: Seoul, Republic of Korea, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zeng, F.; Chen, Y.; Yao, L.; Wu, J. A novel reputation incentive mechanism and game theory analysis for service caching in software-defined vehicle edge computing. Peer-to-Peer Netw. Appl. 2021, 14, 467–481. [Google Scholar] [CrossRef]
- Zeng, F.; Zhang, K.; Wu, L.; Wu, J. Efficient Caching in Vehicular Edge Computing Based on Edge-Cloud Collaboration. IEEE Trans. Veh. Technol. 2023, 72, 2468–2481. [Google Scholar] [CrossRef]
- Li, Y.; Yang, B.; Chen, Z.; Chen, C.; Guan, X. A Contract-Stackelberg Offloading Incentive Mechanism for Vehicular Parked-Edge Computing Networks. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; IEEE: Kuala Lumpur, Malaysia, 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Hussain, M.W.; Reddy, K.H.K.; Rodrigues, J.J.P.C.; Roy, D.S. An Indirect Controller-Legacy Switch Forwarding Scheme for Link Discovery in Hybrid SDN. IEEE Syst. J. 2021, 15, 3142–3149. [Google Scholar] [CrossRef]
- Zhang, Z.; Zeng, F. Efficient Task Allocation for Computation Offloading in Vehicular Edge Computing. IEEE Internet Things J. 2023, 10, 5595–5606. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | Problems and Solutions | Results |
|---|---|---|
| Du [6] | A dual-end optimization method is proposed to balance the benefits of the user side and server side. | Reduce costs. |
| Ku [7] | A heuristic algorithm based on dynamic programming is proposed, which can jointly perform task partitioning and offloading in real time, as well as accomplish adaptive decisions at the system and application levels. | Reduce end-to-end latency. |
| Nazar [8] | A machine learning-based, region-/context-aware equipped content pre-caching strategy is proposed that addresses the problem of pre-caching of early decisions and predicted results. | Improved pre-caching in VANET to avoid network congestion. |
| Dai [9] | A particle swarm optimization-based approach is proposed to minimize the energy and resource consumption of computational offloading under delay constraints. | Reduce average task completion time and improve resource utilization. |
| Li [10] | A Deep Reinforcement Learning (DRL) based algorithm is proposed to solve the scheduling policy optimization problem. | Enable tasks with varying degrees of urgency to be completed within time constraints. |
| Liu [11] | A task scheduling algorithm is proposed to rank tasks in order of priority to meet the time constraints and processing dependency requirements of the tasks. | Reduce the average completion time of multiple tasks. |
| Luo [12] | The problem of resource scheduling is addressed by the Deep Q-Network (DQN) algorithm enhanced in deep reinforcement learning. | Achieve optimal utilization of resources. |
| Ning [14] | Limited cellular spectrum and energy supplies restricted. | Minimize the offloading cost. |
| Jang [15] | Address the issue of optimal energy-efficient offloading strategies when the communication environment changes due to vehicles movement. | Reduce total vehicles energy consumption. |
| Zhou [16] | A value-based iterative reinforcement learning (RL) approach, named Q-learning, is proposed to determine a joint strategy for computational offloading and resource allocation. | Minimize the energy consumption of the whole system. |
| Kumar [17] | Methods related to the reduction of energy consumption in WSNs (a group of sensor nodes capable of sensing various environmental parameters) are summarized. | If applied to the VEC framework, resource consumption can be reduced. |
| Shi [18] | The sequential decision problem of task assignment is solved by reinforcement learning; a dynamic pricing scheme is proposed to guide vehicles to contribute idle computational resources. | Improve task assignment performance. |
| Zeng [19] | A software defined network based vehicular edge computing framework is proposed that introduces reputation values to measure the contribution of each vehicle to the VEC. | Reduce delay, increase edge server profits. |
| Li [21] | A three-stage offloading incentive mechanism based on the Starkelberg model is proposed to obtain the optimal strategy for each participant. | Enhance the utility of tripartite participants. |
| Parameters | Meaning |
|---|---|
| Total task quantity | |
| Amount of tasks offloaded to VEC severs | |
| Amount of tasks offloaded to ECP | |
| Amount of tasks offloaded to parking vehicle | |
| Rate of task transmission from the requesting vehicles to the VEC servers | |
| Rate of task transmission from the requesting vehicles to the ECP | |
| d | Task transfer rate of ECP |
| Computing capability of VEC servers | |
| Computing capability of parking vehicles | |
| Price per unit resource for VEC servers | |
| Price per unit resource for ECP | |
| Price per unit resource for parking vehicles | |
| Number of CPU cycles required to process a one-byte task | |
| Energy consumption factor for task assignment of ECP | |
| Transmission energy factor for requesting vehicles | |
| Energy consumption factor of edge nodes | |
| Time processing factor of edge nodes | |
| Satisfaction factor of requesting vehicle |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 3 Mbits | 0.6 | 1 | |||
| 0.8 Mbps | 0.8 | ||||
| 0.6 Mbps | 0.002 | 1.2 | |||
| [3, 5] MHz | 1 | d | 0.6 Mbps | ||
| [2, 3] MHz | 1.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Q.; Zeng, F. Vehicular Edge-Computing Framework for Making Use of Parking and Charging Electric Vehicles. Appl. Sci. 2023, 13, 4065. https://doi.org/10.3390/app13064065
Deng Q, Zeng F. Vehicular Edge-Computing Framework for Making Use of Parking and Charging Electric Vehicles. Applied Sciences. 2023; 13(6):4065. https://doi.org/10.3390/app13064065
Chicago/Turabian StyleDeng, Qi, and Feng Zeng. 2023. "Vehicular Edge-Computing Framework for Making Use of Parking and Charging Electric Vehicles" Applied Sciences 13, no. 6: 4065. https://doi.org/10.3390/app13064065