
Atmospheric Density Inversion Based on Swarm-C Satellite Accelerometer



Abstract
:1. Introduction
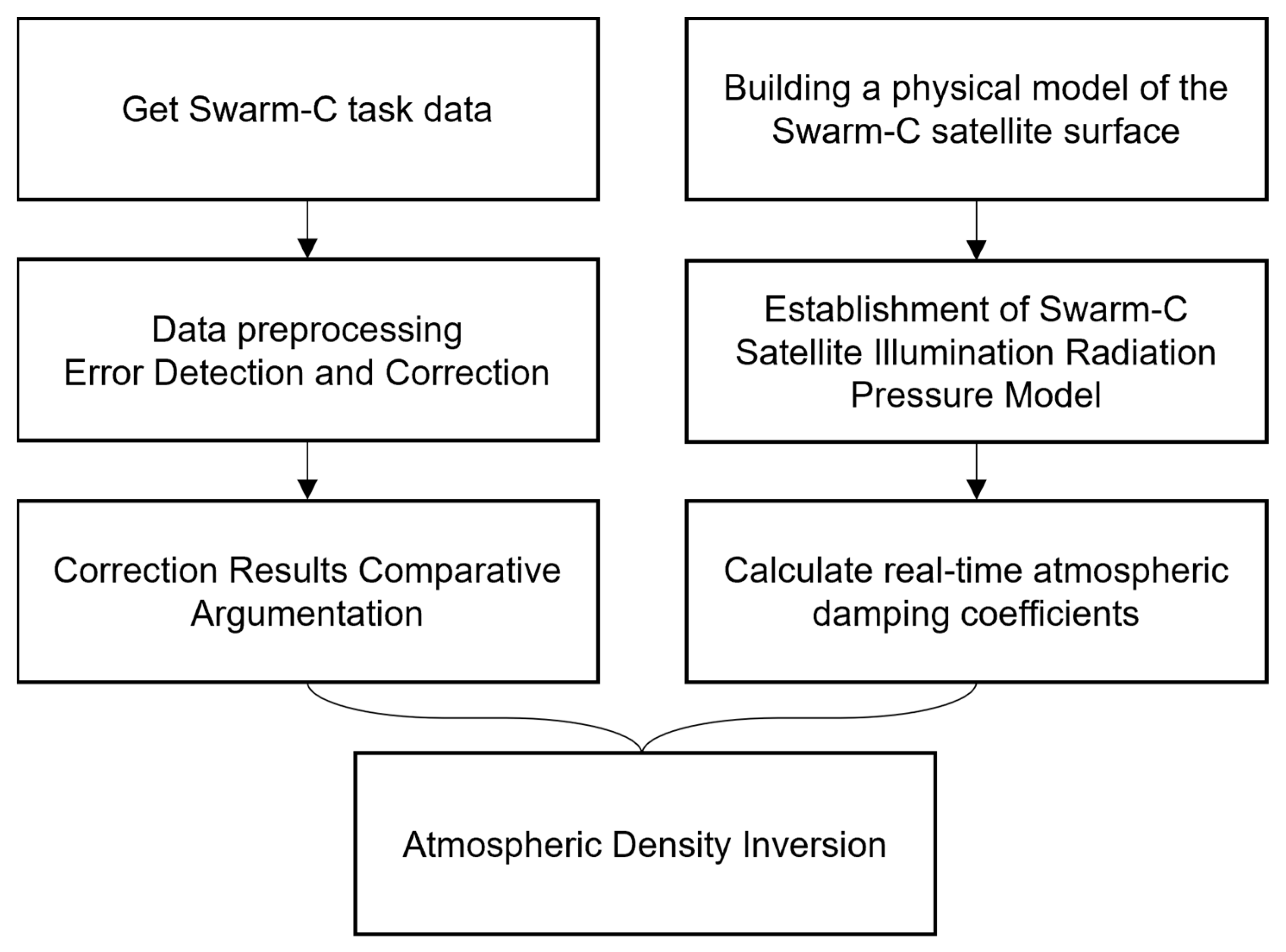
2. Materials and Methods
2.1. Data Preprocessing and Correction
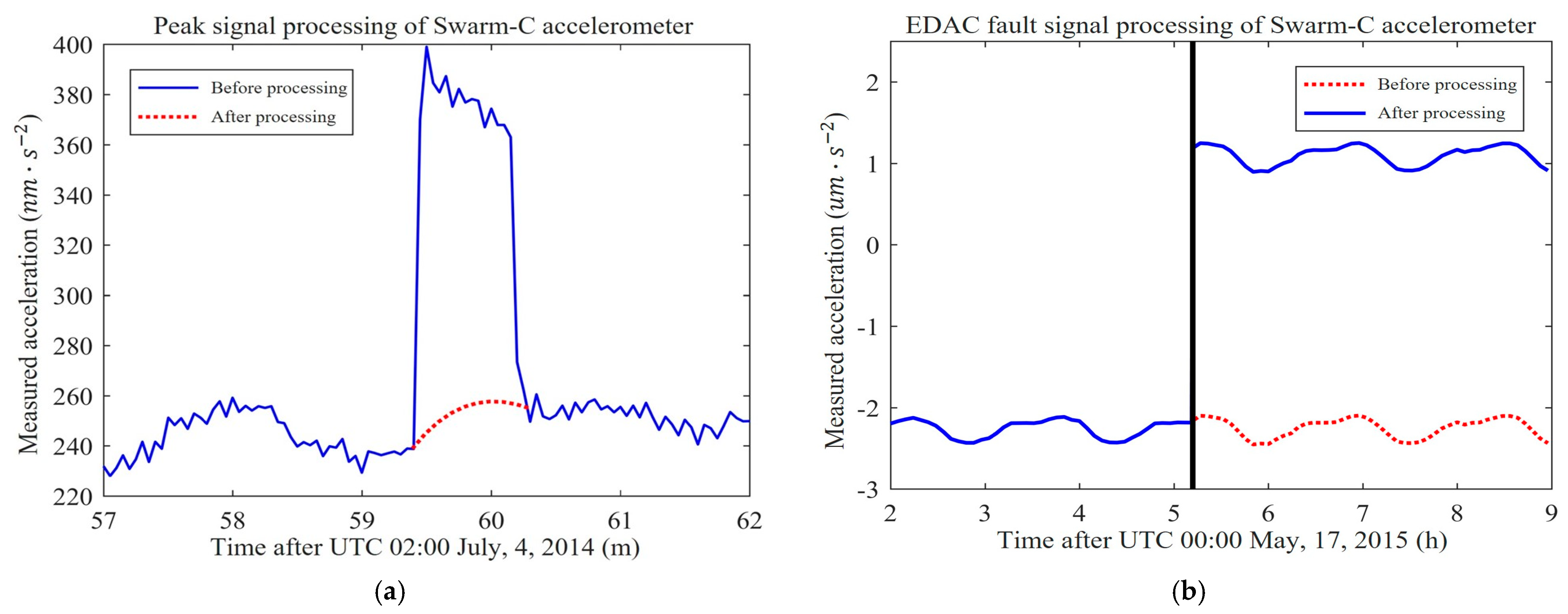
2.1.1. Preprocessing of Swarm-C Accelerometer Data
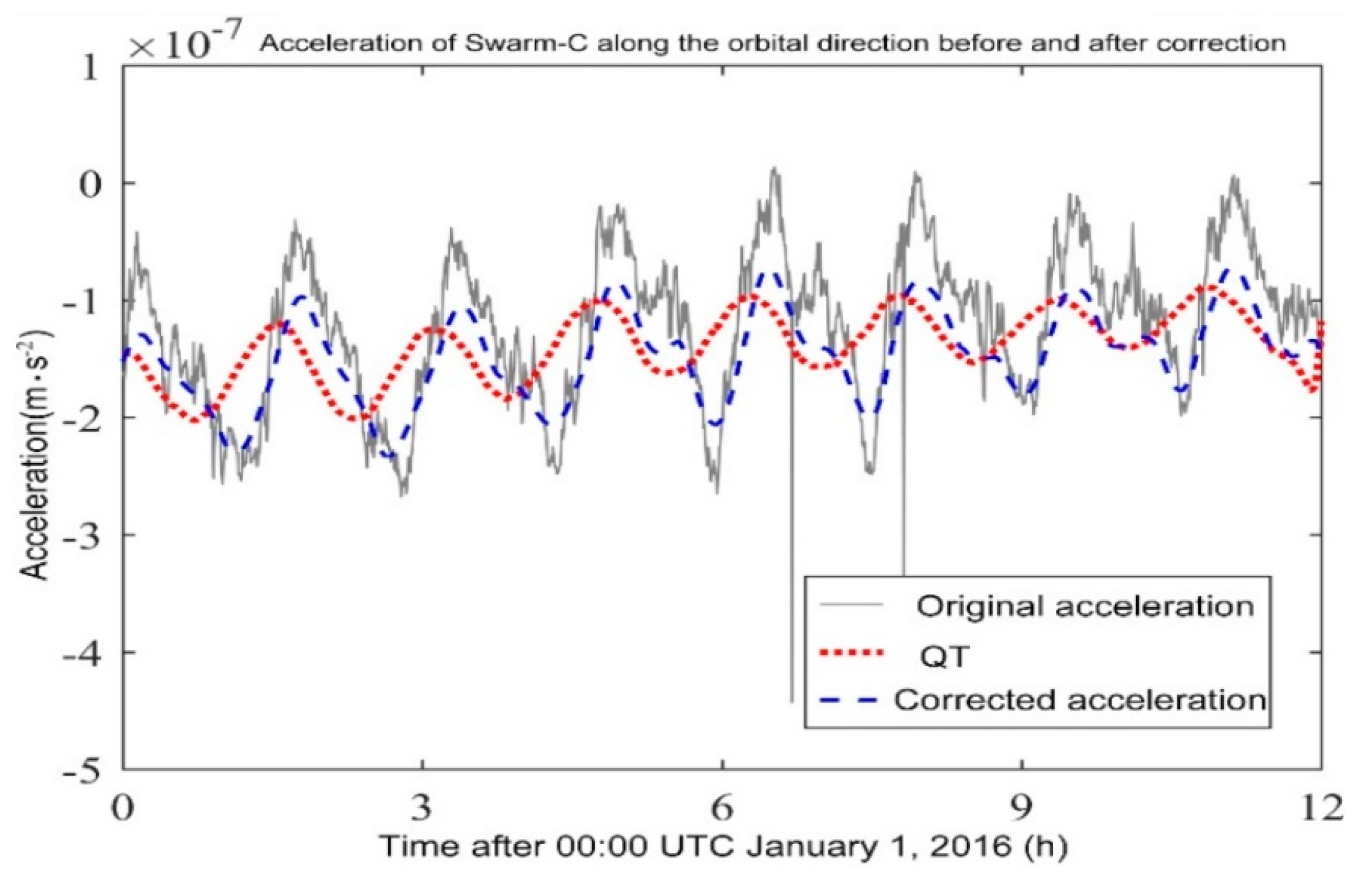
2.1.2. Data Correction Method of Swarm-C Accelerometer
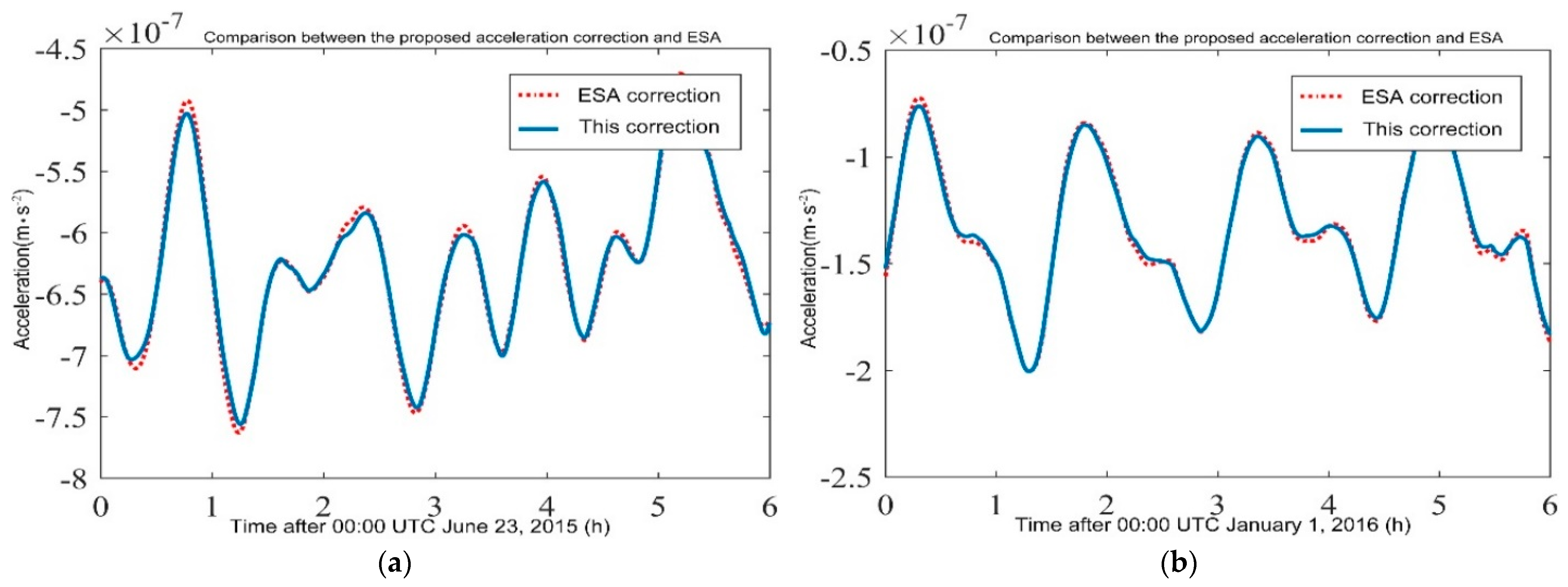
2.1.3. Comparison of Calibration Results
2.2. Method and Model
2.2.1. Swarm-C Satellite Surface Model
2.2.2. Swarm-C Satellite Cone Shadow Modeling
2.2.3. Comparison of Swarm-C Cone Shadow and Column Shadow Modeling
2.2.4. Accelerometer Atmospheric Density Inversion
3. Results
3.1. Calculation of Atmospheric Drag Coefficient of Swarm-C Satellite
3.2. Atmospheric Density Inversion Results of Swarm-C Accelerometer
4. Discussion and Conclusions
- (1)
- Since it is impossible to know all the hardware conditions and fault causes of the Swarm-C satellite accelerometer, the accelerometer calibration method used in this paper cannot correct the errors caused by all hardware problems of the accelerometer and cannot accurately judge. Therefore, the correction scheme for the accelerometer still needs to be improved, and we also expect a higher precision correction algorithm to be developed and published by the ESA. ESA regularly publishes corrected accelerometer data from the Swarm satellites. However, the data update frequency is not high, and the time delay is relatively large. Therefore, we expect the ESA to provide higher precision corrections. This method can release the corrected accelerometer data results timelier and provide convenience for scientific researchers.
- (2)
- The shadow model used in this paper to calculate satellite radiation pressure only considers the projection of the Earth to the satellite. However, the Moon or other large artificial space objects can cause satellites to be projected during the operation of the satellite. When approaching the Moon and other nearby objects, the drag coefficient in that region increases as the density of surrounding particles increases due to gravitational pull. The radiation pressure of the satellite during the flight changes, so the modeling accuracy still needs to be improved. For other space objects, whether they are celestial bodies or artificial flying objects, the projection of satellites can essentially use the solar radiation model and shadow area judgment model mentioned in this paper to simulate radiation pressure. In the follow-up research, we will collect more motion trajectories of occluded objects before modeling. Suppose the trajectories of enough other space objects can be known. In that case, the accuracy of the illumination radiation pressure model used in this study will be significantly improved.
- (3)
- Only accelerometer data from the Swarm satellites are used in this study. The Swarm satellite’s strength lies in its ability to detect the Earth’s magnetic field changes. Therefore, the follow-up research can consider using the magnetic field data of the Swarm satellite combined with the accelerometer data for research. For example, based on magnetic field data to explore the Earth’s magnetic length anomaly and magnetic pole reversal. The influence of geomagnetic anomalies on atmospheric density is further explored based on accelerometer data and magnetic field data.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Montenbruck, O.; Gill, E.; Lutze, F. Satellite orbits: Models, methods, and applications. Appl. Mech. Rev. 2002, 55, B27–B28. [Google Scholar] [CrossRef]
- Bowman, B. True satellite ballistic coefficient determination for HASDM. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 4887. [Google Scholar]
- Bowman, B.; Tobiska, W.K.; Marcos, F.; Huang, C.; Lin, C.; Burke, W. A new empirical thermospheric density model JB2008 using new solar and geomagnetic indices. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6438. [Google Scholar]
- Bowman, B.R.; Tobiska, W.K.; Marcos, F.A.; Valladares, C. The JB2006 empirical thermospheric density model. J. Atmos. Solar-Terrestrial Phys. 2008, 70, 774–793. [Google Scholar] [CrossRef]
- Moe, K.; Moe, M.M. Gas-surface interactions and satellite drag coefficients. Planet. Space Sci. 2005, 53, 793–801. [Google Scholar] [CrossRef]
- Moe, K.; Moe, M.M. Gas-Surface Interactions in Low-Earth Orbit. In Proceedings of the AIP Conference Proceedings, Geneva, Switzerland, 15–20 September 2017; pp. 1313–1318. [Google Scholar]
- Nwankwo, V.U.; Chakrabarti, S.K.; Weigel, R.S. Effects of plasma drag on low Earth orbiting satellites due to solar forcing induced perturbations and heating. Adv. Space Res. 2015, 56, 47–56. [Google Scholar] [CrossRef]
- Weng, L.; Lei, J.; Doornbos, E.; Fang, H.; Dou, X. Seasonal variations of thermospheric mass density at dawn/dusk from GOCE observations. Ann. Geophys. 2018, 36, 489–496. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Weng, L.; Fang, H.; Xie, Y.; Yang, S. Intra-annual variations of the thermospheric density at 400 km altitude from 1996 to 2006. Adv. Space Res. 2014, 54, 327–332. [Google Scholar] [CrossRef]
- Newton, G.P.; Horowitz, R.; Priester, W. Atmospheric density and temperature variations from the explorer XVII satellite and a further comparison with satellite drag. Planet. Space Sci. 1965, 13, 599–616. [Google Scholar] [CrossRef]
- Calabia, A.; Jin, S. Thermospheric density estimation and responses to the March 2013 geomagnetic storm from GRACE GPS-determined precise orbits. J. Atmos. Solar-Terrestrial Phys. 2017, 154, 167–179. [Google Scholar] [CrossRef]
- Drob, D.; Emmert, J.; Crowley, G.; Picone, J.; Shepherd, G.; Skinner, W.; Hays, P.; Niciejewski, R.; Larsen, M.; She, C. An empirical model of the Earth’s horizontal wind fields: HWM07. J. Geophys. Res. Space Phys. 2008, 113, 18. [Google Scholar] [CrossRef] [Green Version]
- Picone, J.; Hedin, A.; Drob, D.P.; Aikin, A. NRLMSISE-00 empirical model of the atmosphere: Statistical comparisons and scientific issues. J. Geophys. Res. Space Phys. 2002, 107, SIA 15-11–SIA 15-16. [Google Scholar] [CrossRef]
- Emmert, J. Altitude and solar activity dependence of 1967–2005 thermospheric density trends derived from orbital drag. J. Geophys. Res. Space Phys. 2015, 120, 2940–2950. [Google Scholar] [CrossRef]
- Calabia, A.; Jin, S. New modes and mechanisms of thermospheric mass density variations from GRACE accelerometers. J. Geophys. Res. Space Phys. 2016, 121, 11191–111212. [Google Scholar] [CrossRef]
- Menvielle, M.; Lathuillere, C.; Bruinsma, S.; Viereck, R. A new method for studying the thermospheric density variability derived from CHAMP/STAR accelerometer data for magnetically active conditions. Ann. Geophys. 2007, 25, 1949–1958. [Google Scholar] [CrossRef]
- Zurek, R.; Tolson, R.; Bougher, S.; Lugo, R.; Baird, D.; Bell, J.; Jakosky, B. Mars thermosphere as seen in MAVEN accelerometer data. J. Geophys. Res. Space Phys. 2017, 122, 3798–3814. [Google Scholar] [CrossRef]
- Bruinsma, S.; Tamagnan, D.; Biancale, R. Atmospheric densities derived from CHAMP/STAR accelerometer observations. Planet. Space Sci. 2004, 52, 297–312. [Google Scholar] [CrossRef]
- Sutton, E.K. Effects of Solar Disturbances on the Thermosphere Densities and Winds from CHAMP and GRACE Satellite Accelerometer Data; University of Colorado at Boulder: Boulder, CO, USA, 2008. [Google Scholar]
- Doornbos, E.; Van Den Ijssel, J.; Luhr, H.; Forster, M.; Koppenwallner, G. Neutral density and crosswind determination from arbitrarily oriented multiaxis accelerometers on satellites. J. Spacecr. Rocket. 2010, 47, 580–589. [Google Scholar] [CrossRef] [Green Version]
- Emmert, J.; McDonald, S.; Drob, D.; Meier, R.; Lean, J.; Picone, J. Attribution of interminima changes in the global thermosphere and ionosphere. J. Geophys. Res. Space Phys. 2014, 119, 6657–6688. [Google Scholar] [CrossRef]
- Mehta, P.M.; Walker, A.C.; Sutton, E.K.; Godinez, H.C. New density estimates derived using accelerometers on board the CHAMP and GRACE satellites. Space Weather 2017, 15, 558–576. [Google Scholar] [CrossRef]
- Visser, P.; Doornbos, E.; van den IJssel, J.; da Encarnação, J.T. Thermospheric density and wind retrieval from Swarm observations. Earth Planets Space 2013, 65, 1319–1331. [Google Scholar] [CrossRef] [Green Version]
- Siemes, C.; de Teixeira da Encarnação, J.; Doornbos, E.; Van Den Ijssel, J.; Kraus, J.; Pereštý, R.; Grunwaldt, L.; Apelbaum, G.; Flury, J.; Holmdahl Olsen, P.E. Swarm accelerometer data processing from raw accelerations to thermospheric neutral densities. Earth Planets Space 2016, 68, 92. [Google Scholar] [CrossRef] [Green Version]
- Bezděk, A. Calibration of accelerometers aboard GRACE satellites by comparison with POD-based nongravitational accelerations. J. Geodyn. 2010, 50, 410–423. [Google Scholar] [CrossRef] [Green Version]
- Bezděk, A.; Sebera, J.; Klokočník, J. Calibration of Swarm accelerometer data by GPS positioning and linear temperature correction. Adv. Space Res. 2018, 62, 317–325. [Google Scholar] [CrossRef]
- Saad, N.A.; Khalil, K.I.; Amin, M.Y. Analytical solution for the combined solar radiation pressure and luni-solar effects on the orbits of high altitude satellites. Open Astron. J. 2010, 3, 113–122. [Google Scholar] [CrossRef]
- Srivastava, V.K.; Ashutosh, A.; Roopa, M.; Ramakrishna, B.; Pitchaimani, M.; Chandrasekhar, B. Spherical and oblate Earth conical shadow models for LEO satellites: Applications and comparisons with real time data and STK to IRS satellites. Aerosp. Sci. Technol. 2014, 33, 135–144. [Google Scholar] [CrossRef]
- Moe, M.M.; Wallace, S.D.; Moe, K. Errata: Refinements in Determining Satellite Drag Coefficients: Method for Resolving Density Discrepancies. J. Guid. Control. Dyn. 1993, 16, 0991b. [Google Scholar] [CrossRef]
- Sentman, L.H. Free Molecule Flow Theory and Its Application to the Determination of Aerodynamic Forces; Lockheed Missiles and Space Co Inc Sunnyvale Ca: Sunnyvale, CA, USA, 1961. [Google Scholar]
- Van den IJssel, J.; Encarnação, J.; Doornbos, E.; Visser, P. Precise science orbits for the Swarm satellite constellation. Adv. Space Res. 2015, 56, 1042–1055. [Google Scholar] [CrossRef]
- Ren, T.; Miao, J.; Liu, S. Atmospheric density determination using high-accuracy satellite GPS data. Sci. China Technol. Sci. 2018, 61, 204–211. [Google Scholar] [CrossRef]
- Wöske, F.; Kato, T.; Rievers, B.; List, M. GRACE accelerometer calibration by high precision non-gravitational force modeling. Adv. Space Res. 2019, 63, 1318–1335. [Google Scholar] [CrossRef]
- Calabia, A.; Jin, S.; Tenzer, R. A new GPS-based calibration of GRACE accelerometers using the arc-to-chord threshold uncovered sinusoidal disturbing signal. Aerosp. Sci. Technol. 2015, 45, 265–271. [Google Scholar] [CrossRef]
- Koch, I.; Shabanloui, A.; Flury, J. Calibration of GRACE Accelerometers Using Two Types of Reference Accelerations. In Proceedings of the International Symposium on Advancing Geodesy in a Changing World, Kobe, Japan, 30 July–4 August 2017; pp. 97–104. [Google Scholar]
- Klinger, B.; Mayer-Gürr, T. The role of accelerometer data calibration within GRACE gravity field recovery: Results from ITSG-Grace2016. Adv. Space Res. 2016, 58, 1597–1609. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Panel | Area | X | Y | Z |
|---|---|---|---|---|
| Nadir 1 | 1.540 | 0.0 | 0.0 | 1.0 |
| Nadir 2 | 1.400 | −0.19766 | 0.0 | 0.98027 |
| Nadir 3 | 1.600 | −0.13808 | 0.0 | 0.99042 |
| Solar Array +Y | 3.450 | 0.0 | 0.58779 | −0.80902 |
| Solar Array −Y | 3.450 | 0.0 | −0.58779 | −0.80902 |
| Zenith | 0.500 | 0.0 | 0.0 | −1.0 |
| Front | 0.560 | 1.0 | 0.0 | 0.0 |
| Side Wall +Y | 0.753 | 0.0 | 1.0 | 0.0 |
| Side Wall −Y | 0.753 | 0.0 | −1.0 | 0.0 |
| Shear Panel Nadir Front | 0.800 | 1.0 | 0.0 | 0.0 |
| Shear Panel Nadir Back | 0.800 | −1.0 | 0.0 | 0.0 |
| Boom +Y | 0.600 | 0.0 | 1.0 | 0.0 |
| Boom −Y | 0.600 | 0.0 | −1.0 | 0.0 |
| Boom Zenith | 0.600 | −0.23924 | 0.0 | −0.97096 |
| Boom Nadir | 0.600 | 0.22765 | 0.0 | 0.97374 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, L.; Wang, L.; Tian, J.; Yin, Z.; Liu, M.; Zheng, W. Atmospheric Density Inversion Based on Swarm-C Satellite Accelerometer. Appl. Sci. 2023, 13, 3610. https://doi.org/10.3390/app13063610
Yin L, Wang L, Tian J, Yin Z, Liu M, Zheng W. Atmospheric Density Inversion Based on Swarm-C Satellite Accelerometer. Applied Sciences. 2023; 13(6):3610. https://doi.org/10.3390/app13063610
Chicago/Turabian StyleYin, Lirong, Lei Wang, Jiawei Tian, Zhengtong Yin, Mingzhe Liu, and Wenfeng Zheng. 2023. "Atmospheric Density Inversion Based on Swarm-C Satellite Accelerometer" Applied Sciences 13, no. 6: 3610. https://doi.org/10.3390/app13063610