
Modeling and Analysis of Drill String–Casing Collision under the Influence of Inviscid Fluid Forces

Abstract
:1. Introduction
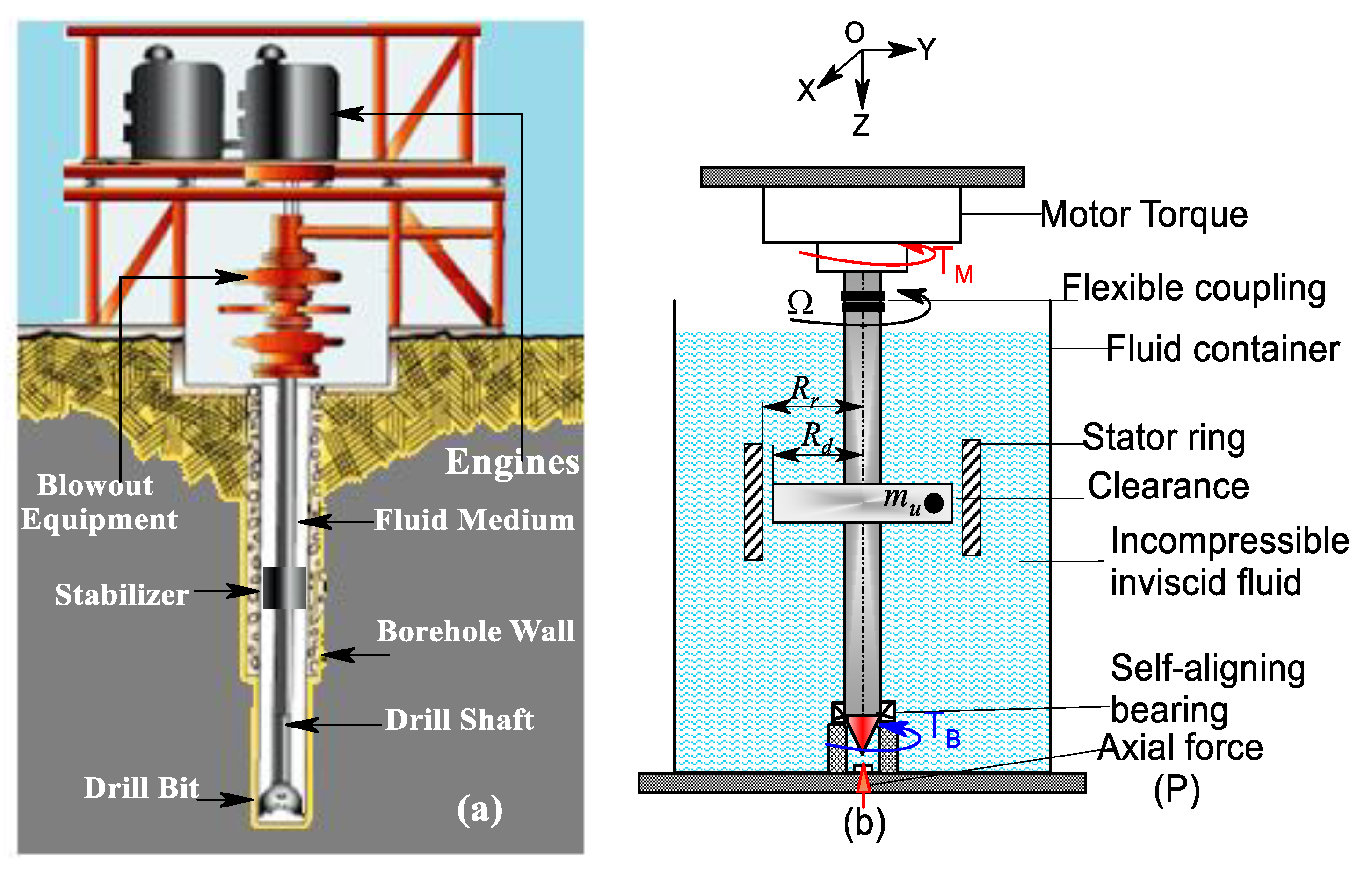
2. Mathematical Modeling of the Drill String System
2.1. Energy Principle and Expression
2.2. Mathematical Modeling of the 3D Rubbing Contact
2.3. Nonlinear Bit–Rock Interaction Model
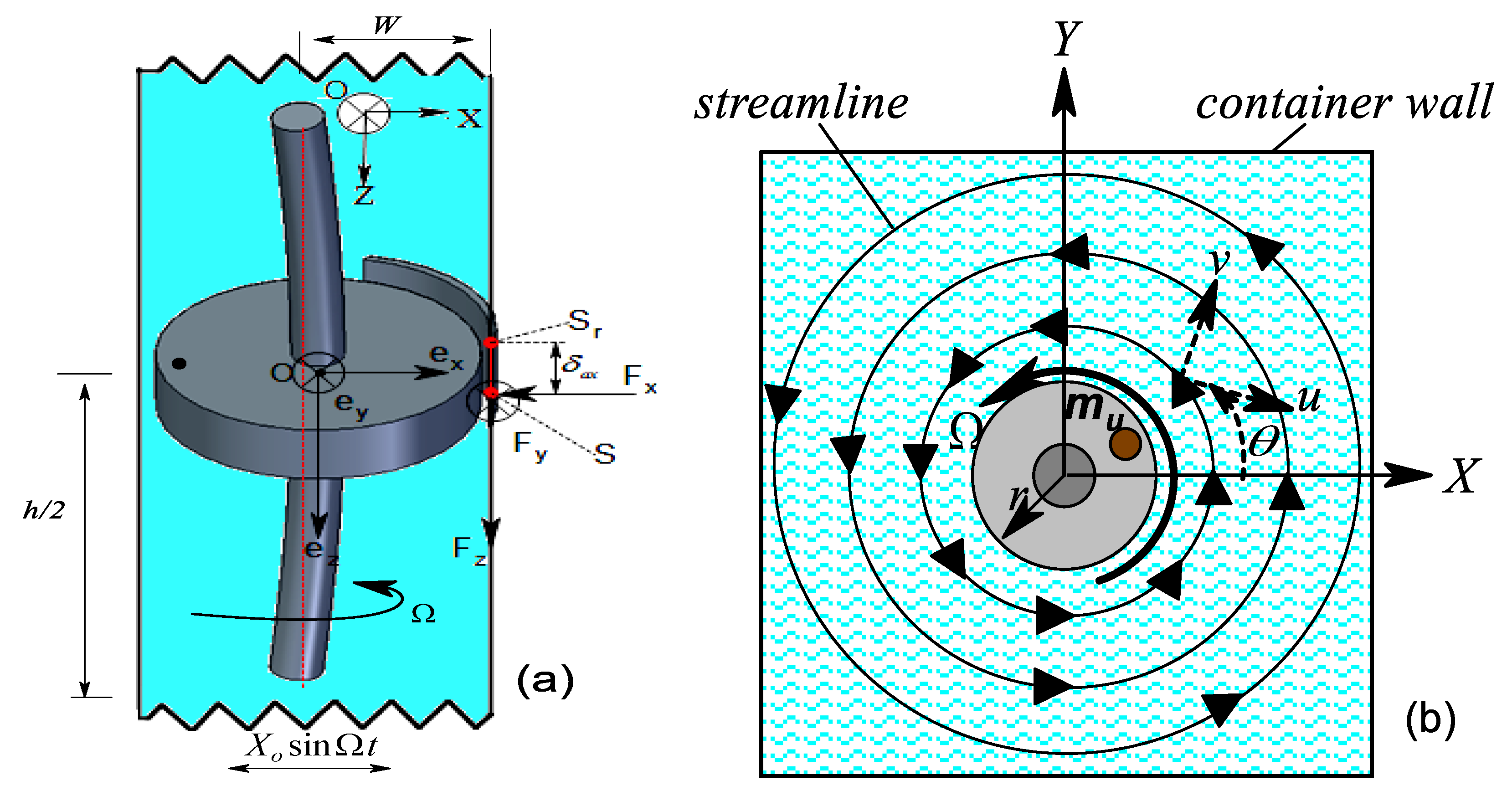
3. Mathematical Modeling of the Inviscid Fluid System
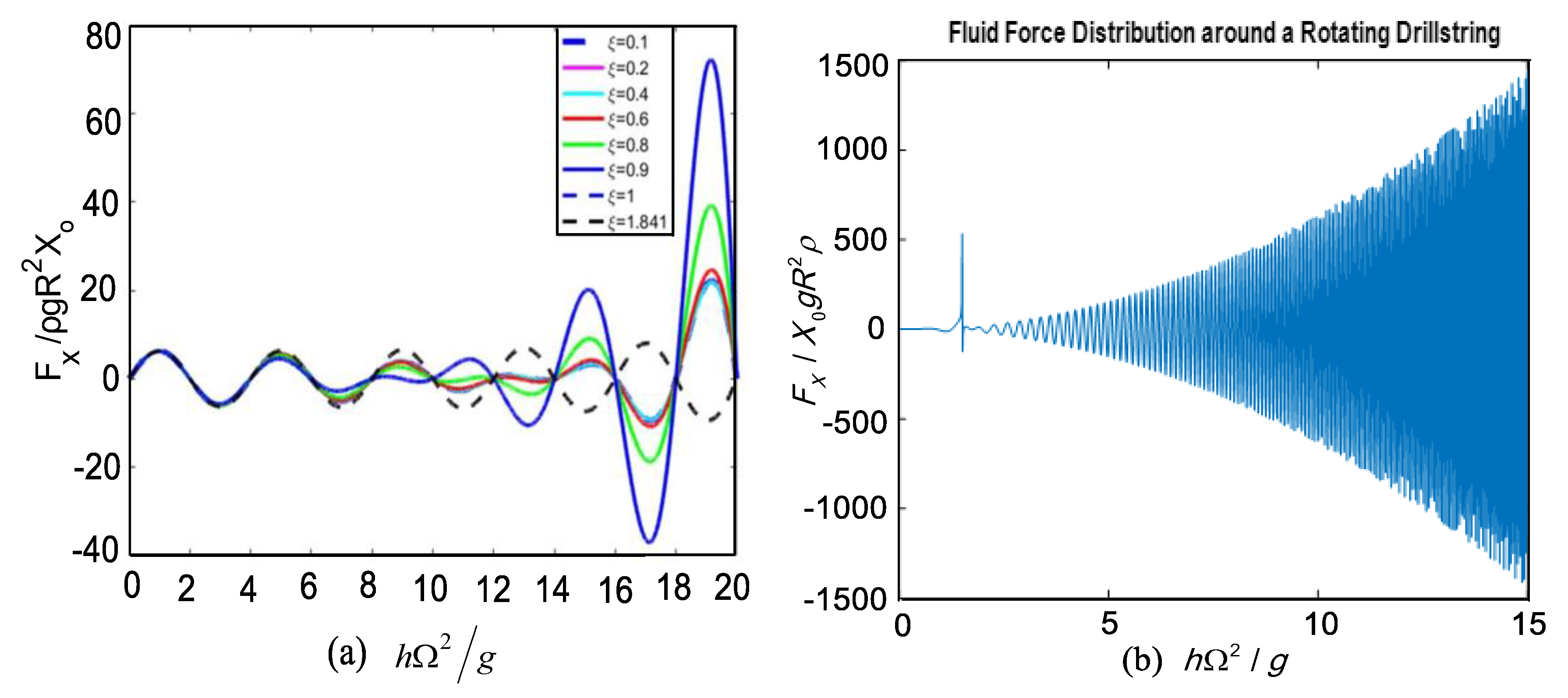
3.1. The Hydrodynamic Force under Lateral Excitation Force
3.2. The Equations of Motion of the Rotor–Casing Rub System Immersed in an Inviscid Fluid
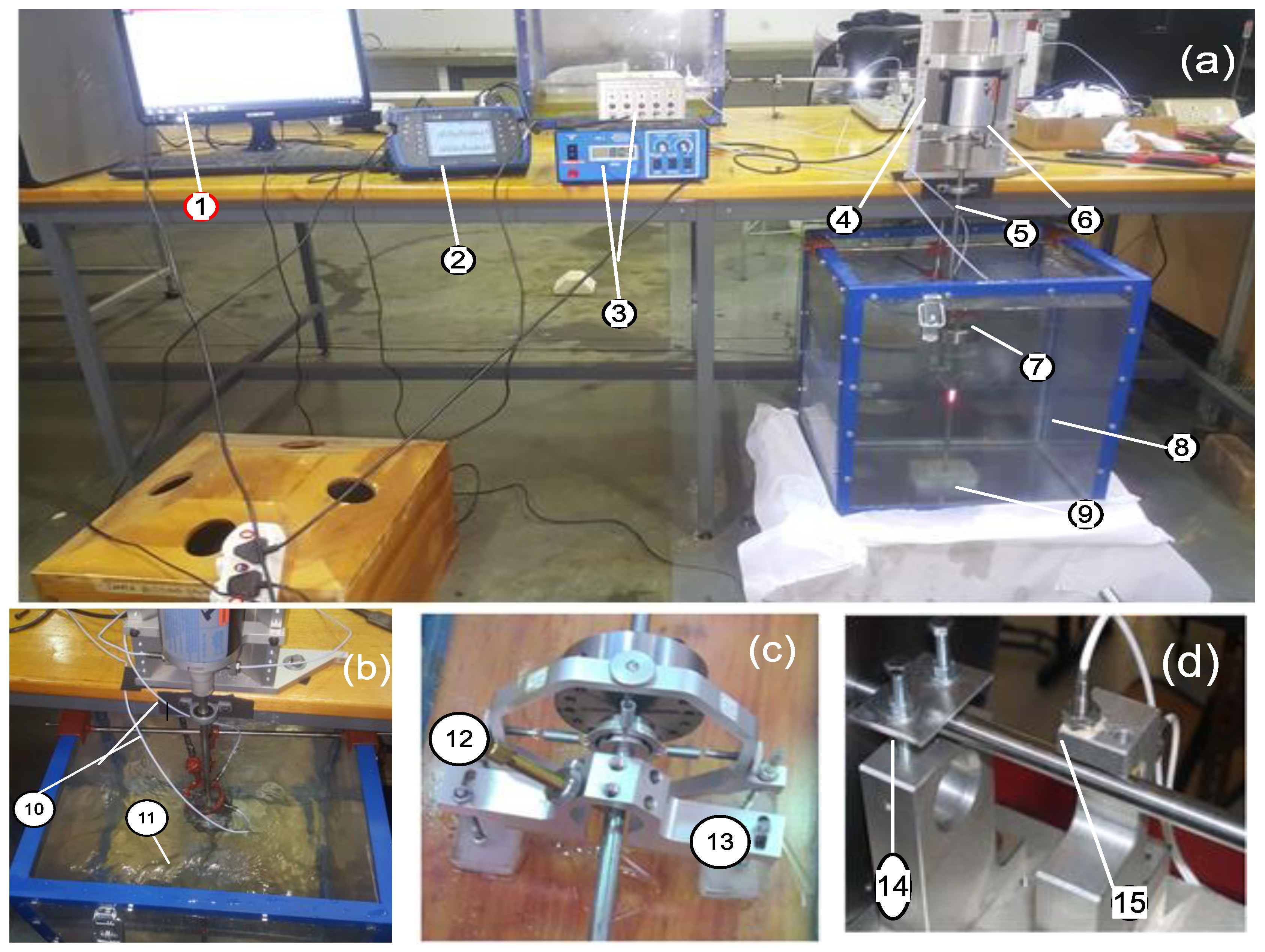
4. Description of the Test Bench and Experimental Approach
4.1. Experimental Setup Description
4.2. Fluid Model Properties
5. Numerical Simulation Results and Discussion
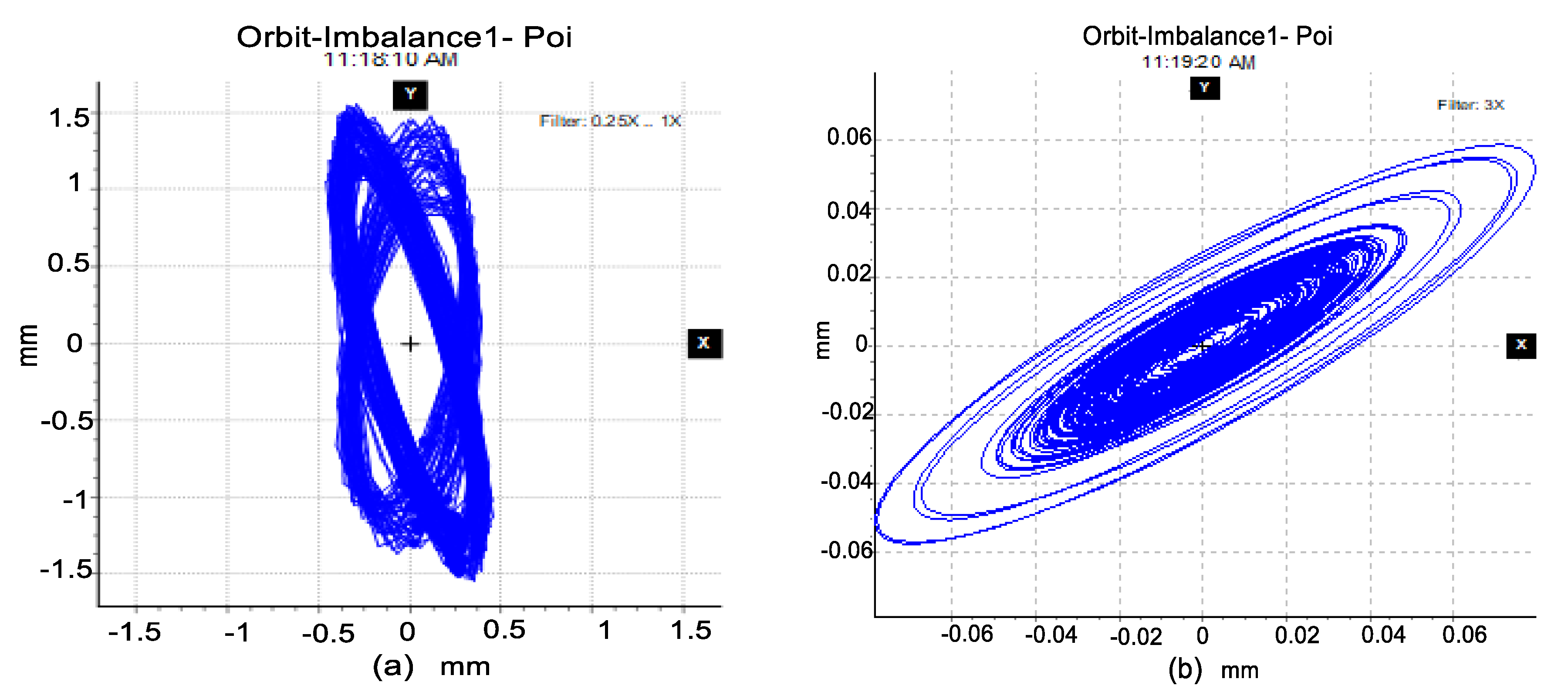
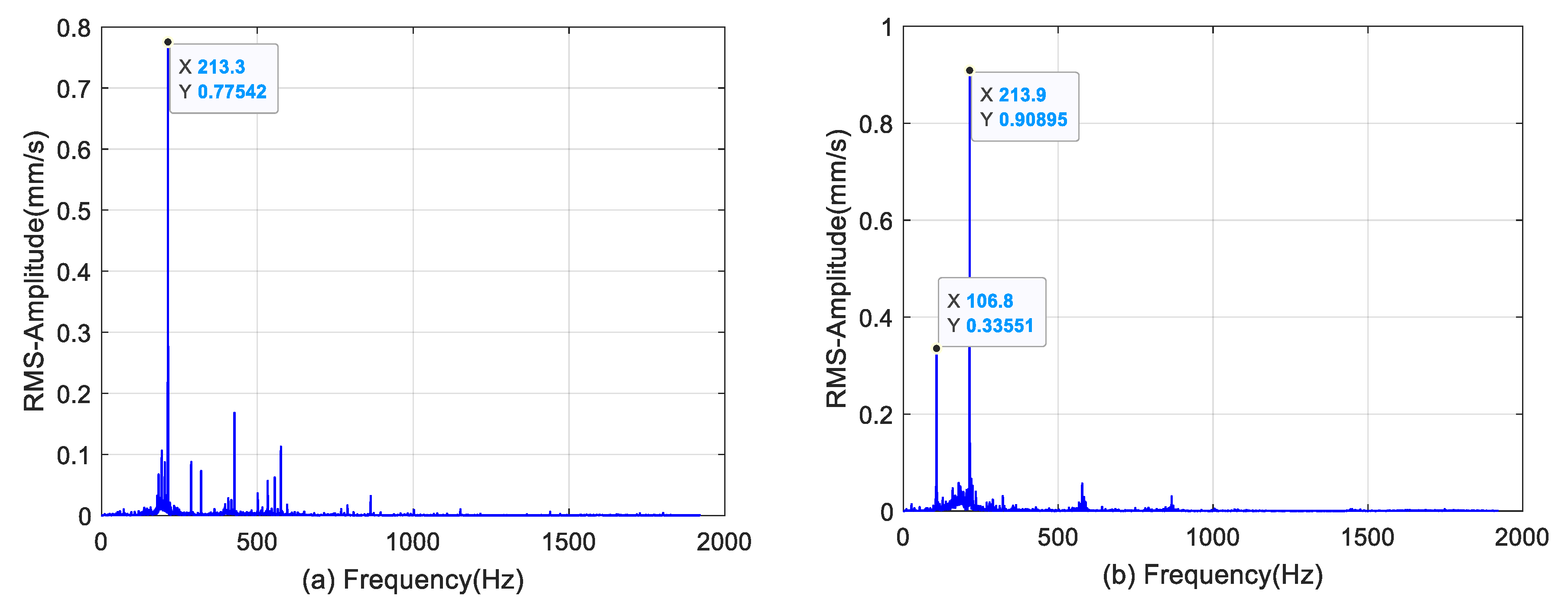
5.1. Imbalanced Drill String System Response
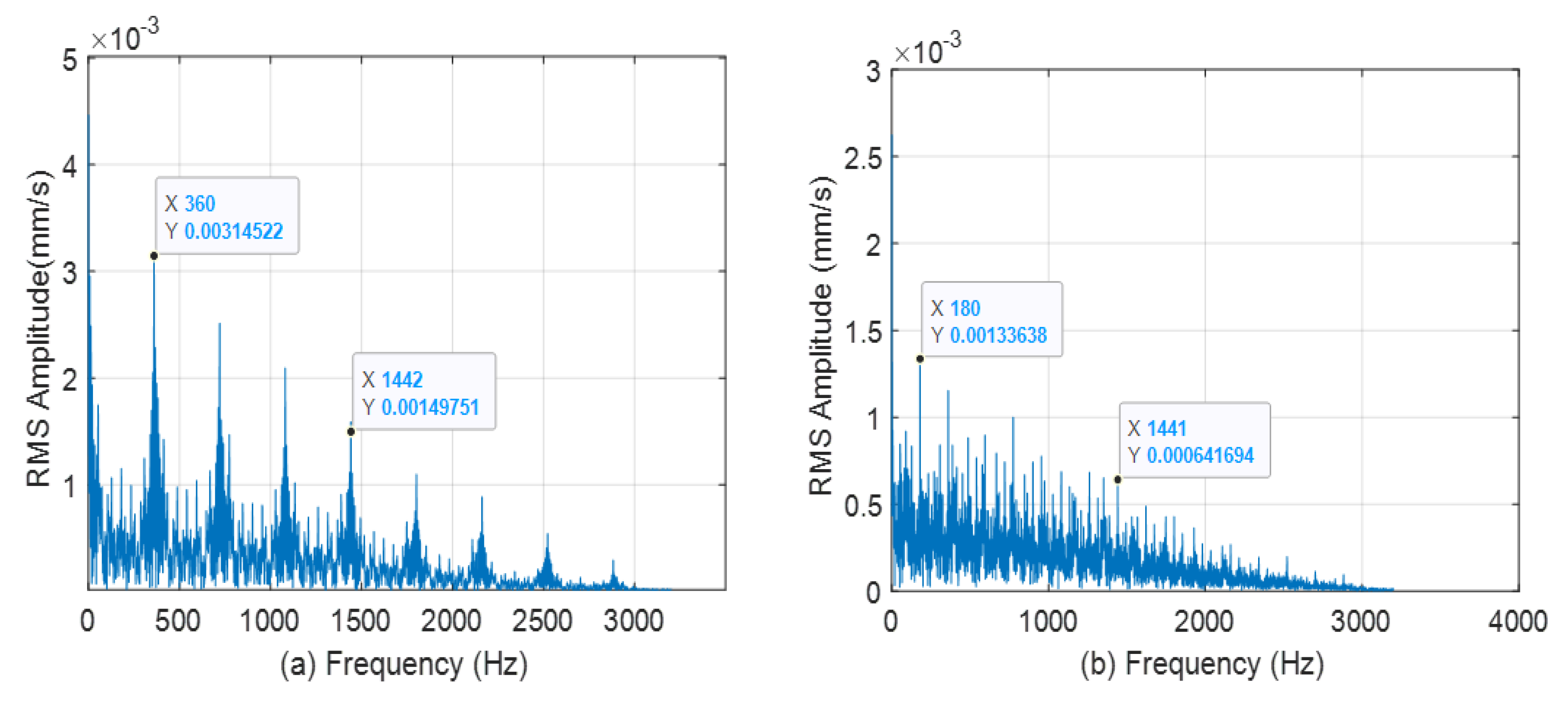
5.2. Response of the Imbalanced Drilling System and Diagnosis of the Rubbing Effects
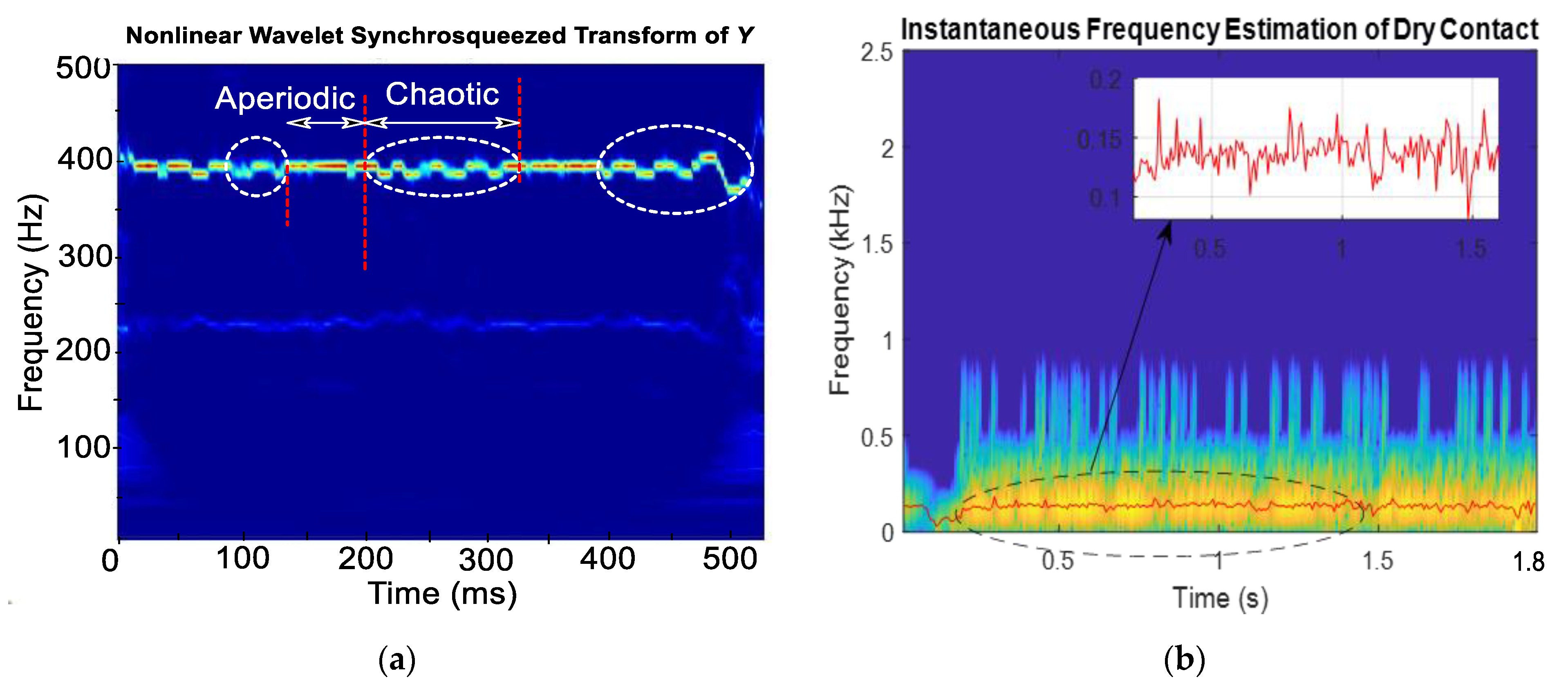
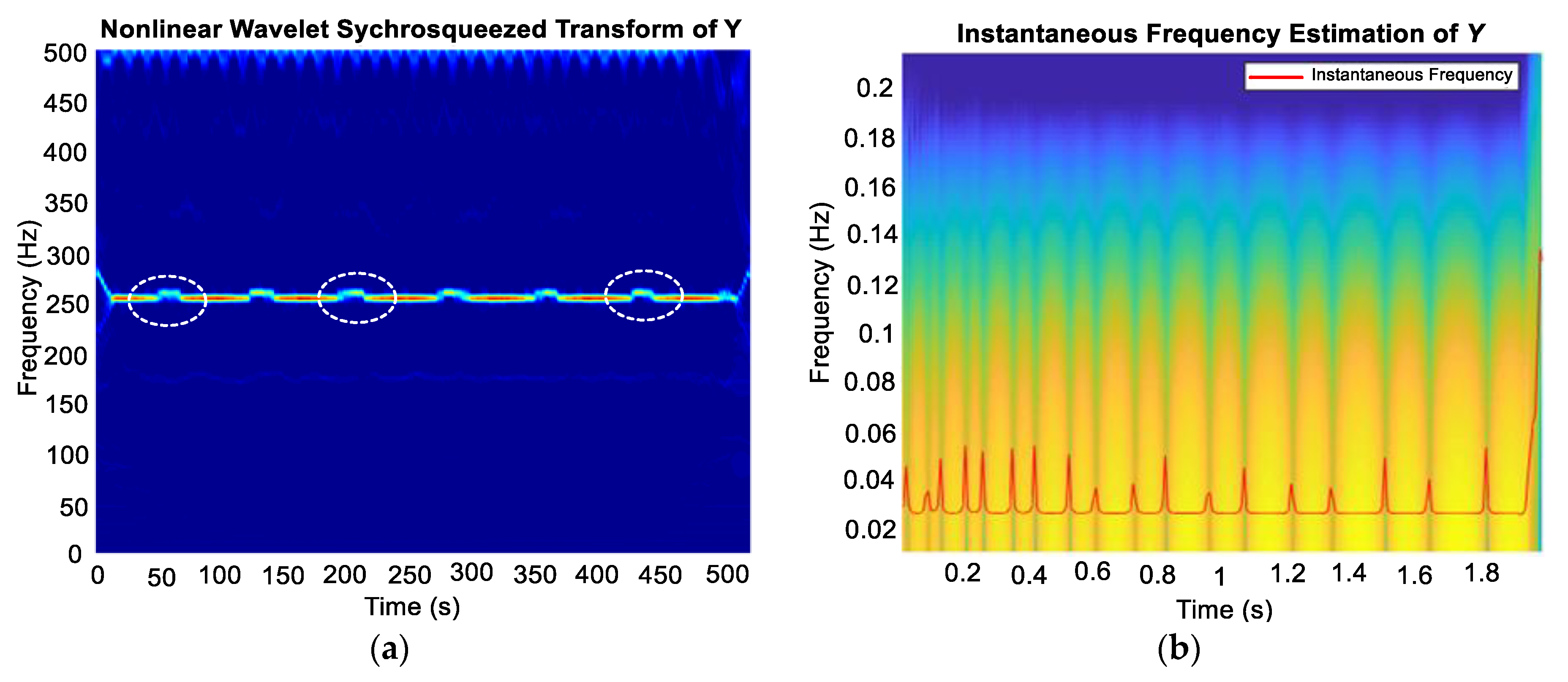
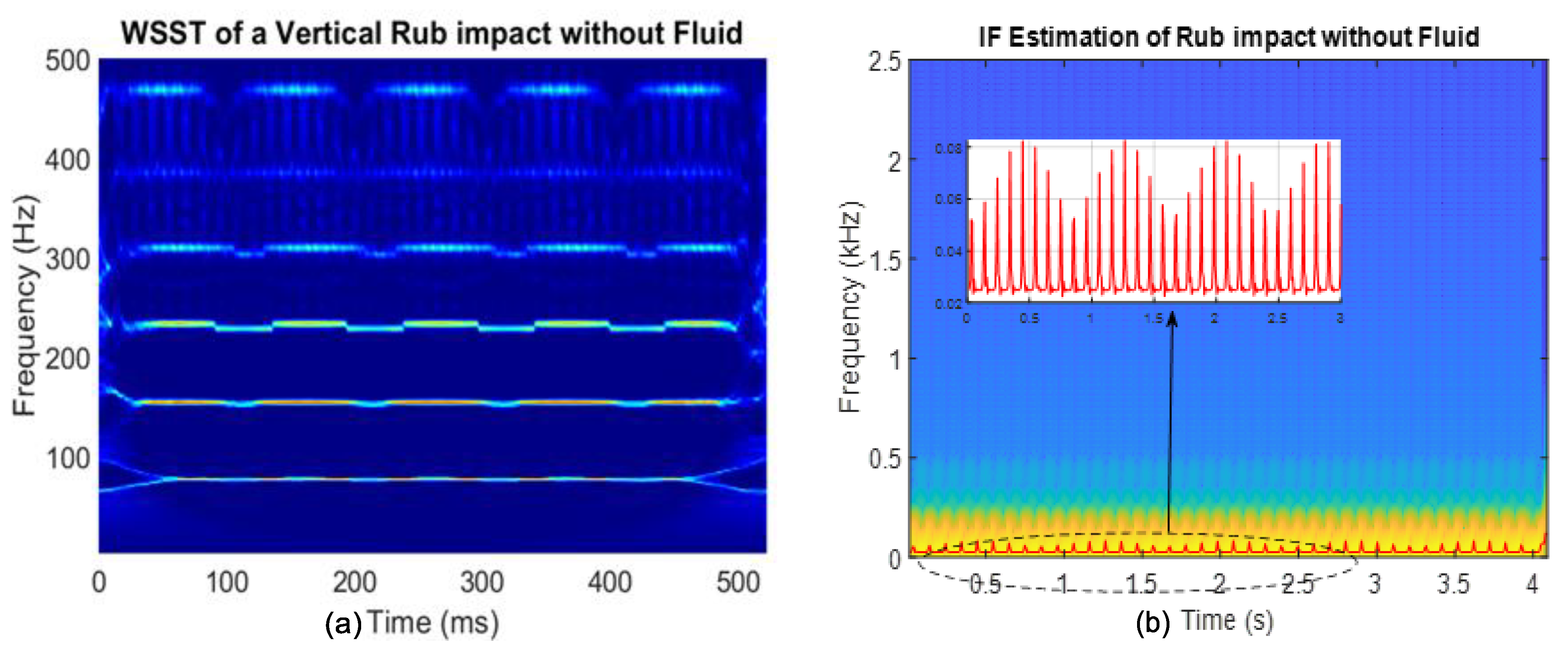
5.3. Feature Extraction of the Rubbing Drill String System by Wavelet Synchrosqueezing Transform
6. Experimental Analysis and Discussion
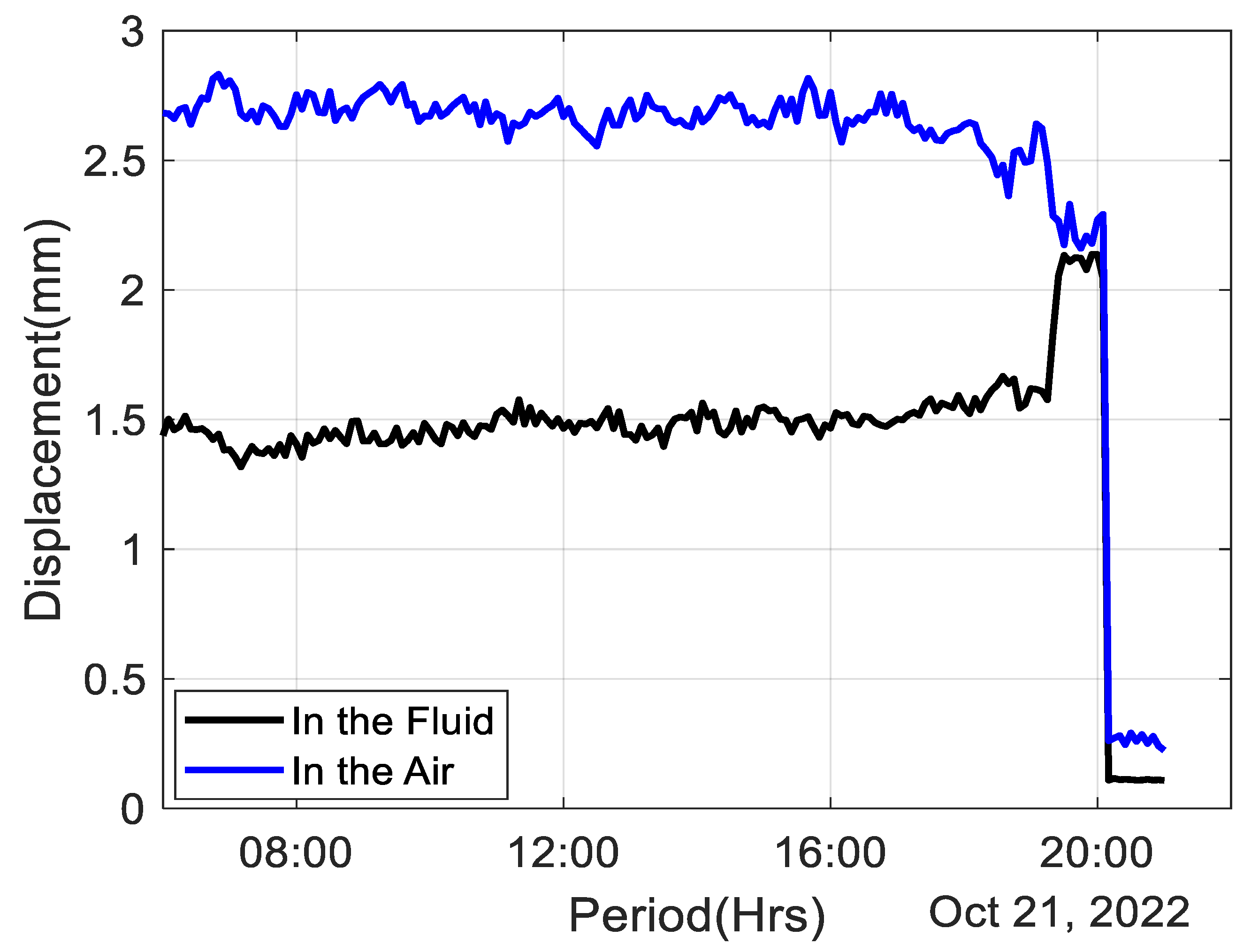
6.1. Practical Test 1: Imbalanced Vertical Shaft Response
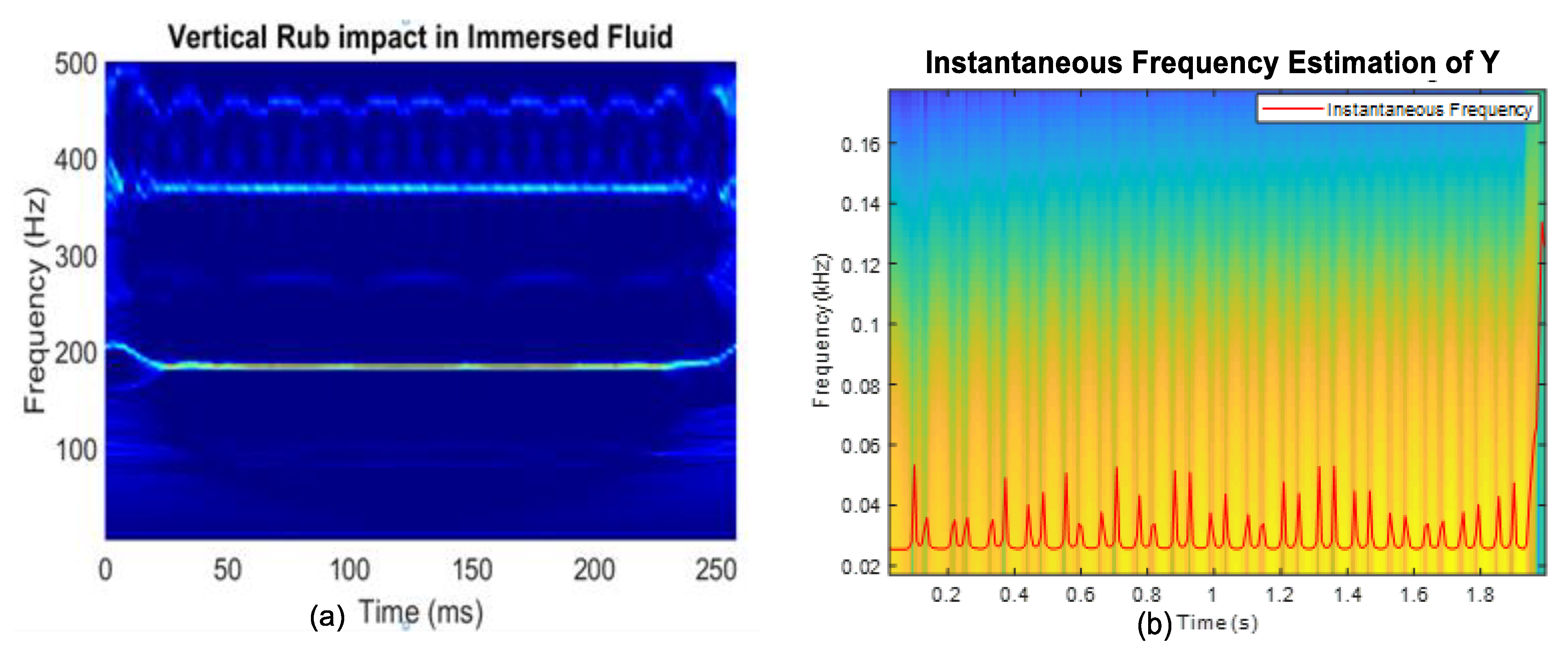
6.2. Practical Test 2: Imbalanced Vertical Shaft with Friction and Fluid
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ibrahim, R.A. Liquid Sloshing Dynamics: Theory and Applications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Ghasemloonia, A.; Rideout, D.G.; Butt, S.D. A review of drill string vibration modeling and suppression methods. J. Pet. Sci. Eng. 2015, 131, 150–164. [Google Scholar] [CrossRef]
- Joshi, N.; Khapre, A.; Keshav, A.; Poonia, A.K. Analysis of drilling fluid flow in the annulus of drill string through computational fluid dynamics. J. Phys. Conf. Ser. 2021, 1913, 012128. [Google Scholar] [CrossRef]
- Spanos, P.D.; Chevallier, A.M.; Politis, N.P. Nonlinear stochastic drill string vibrations. J. Vib. Acoust. 2002, 124, 512–518. [Google Scholar] [CrossRef]
- Yigit, A.S.; Christoforou, A.P. Coupled torsional and bending vibrations of actively controlled drill strings. J. Sound Vib. 2000, 234, 67–83. [Google Scholar] [CrossRef]
- Gulyayev, V.I.; Gaidaichuk, V.V.; Solovjov, I.L.; Gorbunovich, I.V. The buckling of elongated rotating drill strings. J. Pet. Sci. Eng. 2009, 67, 140–148. [Google Scholar] [CrossRef]
- Khulief, Y.A.; Al-Naser, H. Finite element dynamic analysis of drill strings. Finite Elem. Anal. Des. 2005, 41, 1270–1288. [Google Scholar] [CrossRef]
- Zamanian, M.; Khadem, S.E.; Ghazavi, M.R. Stick-slip oscillations of drag bits by considering damping of drilling mud and active damping system. J. Pet. Sci. Eng. 2007, 59, 289–299. [Google Scholar] [CrossRef]
- Sahebkar, S.M.; Ghazavi, M.R.; Khadem, S.E.; Ghayesh, M.H. Nonlinear vibration analysis of an axially moving drill string system with time-dependent axial load and axial velocity in an inclined well. Mech. Mach. Theory 2011, 46, 743–760. [Google Scholar] [CrossRef]
- Ghasemloonia, A.; Rideout, D.G.; Butt, S.D. Coupled transverse vibration modeling of drill strings subjected to torque and spatially varying axial load. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 227, 946–960. [Google Scholar] [CrossRef]
- Ghasemloonia, A.; Rideout, D.G.; Butt, S.D. Vibration analysis of a drill string in vibration-assisted rotary drilling: Finite element modeling with analytical validation. J. Energy Resour. Technol. 2013, 135, 032902. [Google Scholar] [CrossRef]
- Tchomeni, B.X.; Alugongo, A. Modelling and Dynamic Analysis of an Unbalanced and Cracked Cardan Shaft for Vehicle Propeller Shaft Systems. Appl. Sci. 2021, 11, 8132. [Google Scholar] [CrossRef]
- Tchomeni, B.X.; Alugongo, A. Vibrations of Misaligned Rotor System with Hysteretic Friction Arising from Driveshaft–Stator Contact under Dispersed Viscous Fluid Influences. Appl. Sci. 2021, 11, 8089. [Google Scholar] [CrossRef]
- Tchomeni, B.X.; Alugongo, A. Modelling and numerical simulation of vibrations induced by mixed faults of a drilling system immersed in an incompressible viscous fluid. Adv. Mech. Eng. 2018, 10, 1687814018819341. [Google Scholar] [CrossRef]
- Kamel, J.M.; Yigit, A.S. Modeling and analysis of stick-slip and bit bounce in oil well drill strings equipped with drag bits. J. Sound Vib. 2014, 333, 6885–6899. [Google Scholar] [CrossRef]
- Beatty, R.F. Differentiating rotor response due to radial rubbing. J. Vib. Acoust. Stress Reliab. Des. 1985, 107, 151–160. [Google Scholar] [CrossRef]
- Navarro-López, E.M. An alternative characterization of bit-sticking phenomena in a multi-degree-of-freedom controlled drill string. Nonlinear Anal. Real World Appl. 2009, 10, 3162–3174. [Google Scholar] [CrossRef]
- Liu, Y.; Paez Chavez, J.; De Sa, R.; Walker, S. Numerical and experimental studies of stick–slip oscillations in drill strings. Nonlinear Dyn. 2017, 90, 2959–2978. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Wang, J.; Shan, Y.; Wang, C.; Hu, Y. Measurement and Analysis of Downhole Drill String Vibration Signal. Appl. Sci. 2021, 11, 11484. [Google Scholar] [CrossRef]
- Khajiyeva, L.A.; Andrianov, I.V.; Sabirova, Y.F.; Kudaibergenov, A.K. Analysis of Drill-String Nonlinear Dynamics Using the Lumped-Parameter Method. Symmetry 2022, 14, 1495. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drill String Parameter | Value and Unit | Bearing Stiffness | Value and Unit |
|---|---|---|---|
| Length of the shaft (L) Shaft diameter (D) Disc radius (Rd) Disk moment of inertia (JD) Motor moment of inertia (JM) Shaft torsional damping (CT) Damping of the shaft (C0) Friction coefficient (μ) Rotor–casing clearance (δ) Radial clearance (δax) | 570 mm 10 mm 0.15 m 0.1861 kg.m2 10.36 kg.m2 90 Nms/rad 100.44 kg/s 0.2 20 μm 60 μm | Bearing shaft stiffness (Ko) Casing stiffness (Ks) Lateral damping ratio (𝜉l) Torsional damping (𝜉T) | 7.35 × 105 Nm−1 6.9 × 107 N/m 0.0287 0.03 |
| Disc | Value and Unit | ||
| Shaft–disc mass (M) Eccentricity mass (mu) Mass eccentricity (e) Disc thickness (Ddisc) | 16.845 kg 0.25 kg 0.0011 m 25 m | ||
| Inviscid Fluid Properties | Units | Tank Parameter | Value and Unit |
| Water (T°) Fluid frequencies (ω1n) Fluid density (ρ) Shaft–fluid angular speed (Ω) | 20 °C 6.01 rad/s 1004 kg/m3 4.8522 rad/s | Tank width (W) Excitation amplitude (X0/W) Axial force magnitude (Pf) Static weight component (Po) | 0.3 m 0.166 50 kN 100 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tchomeni Kouejou, B.X.; Sozinando, D.F.; Anyika Alugongo, A. Modeling and Analysis of Drill String–Casing Collision under the Influence of Inviscid Fluid Forces. Appl. Sci. 2023, 13, 3557. https://doi.org/10.3390/app13063557
Tchomeni Kouejou BX, Sozinando DF, Anyika Alugongo A. Modeling and Analysis of Drill String–Casing Collision under the Influence of Inviscid Fluid Forces. Applied Sciences. 2023; 13(6):3557. https://doi.org/10.3390/app13063557
Chicago/Turabian StyleTchomeni Kouejou, Bernard Xavier, Desejo Filipeson Sozinando, and Alfayo Anyika Alugongo. 2023. "Modeling and Analysis of Drill String–Casing Collision under the Influence of Inviscid Fluid Forces" Applied Sciences 13, no. 6: 3557. https://doi.org/10.3390/app13063557