
A Shallow Seafloor Reverberation Simulation Method Based on Generative Adversarial Networks

 ,
,
Abstract
:1. Introduction
2. Methodology
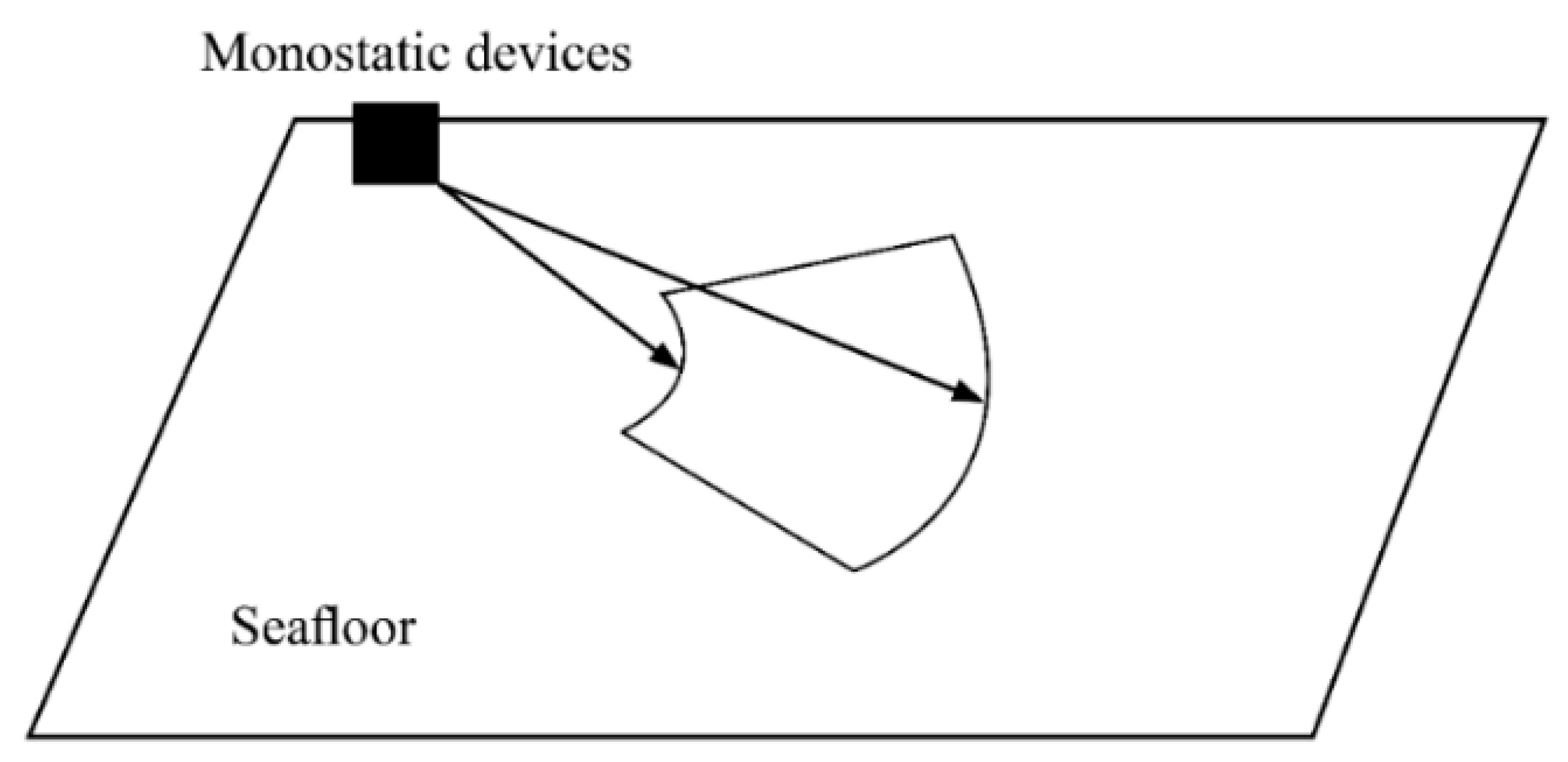
2.1. The Traditional Point-Scattering Method
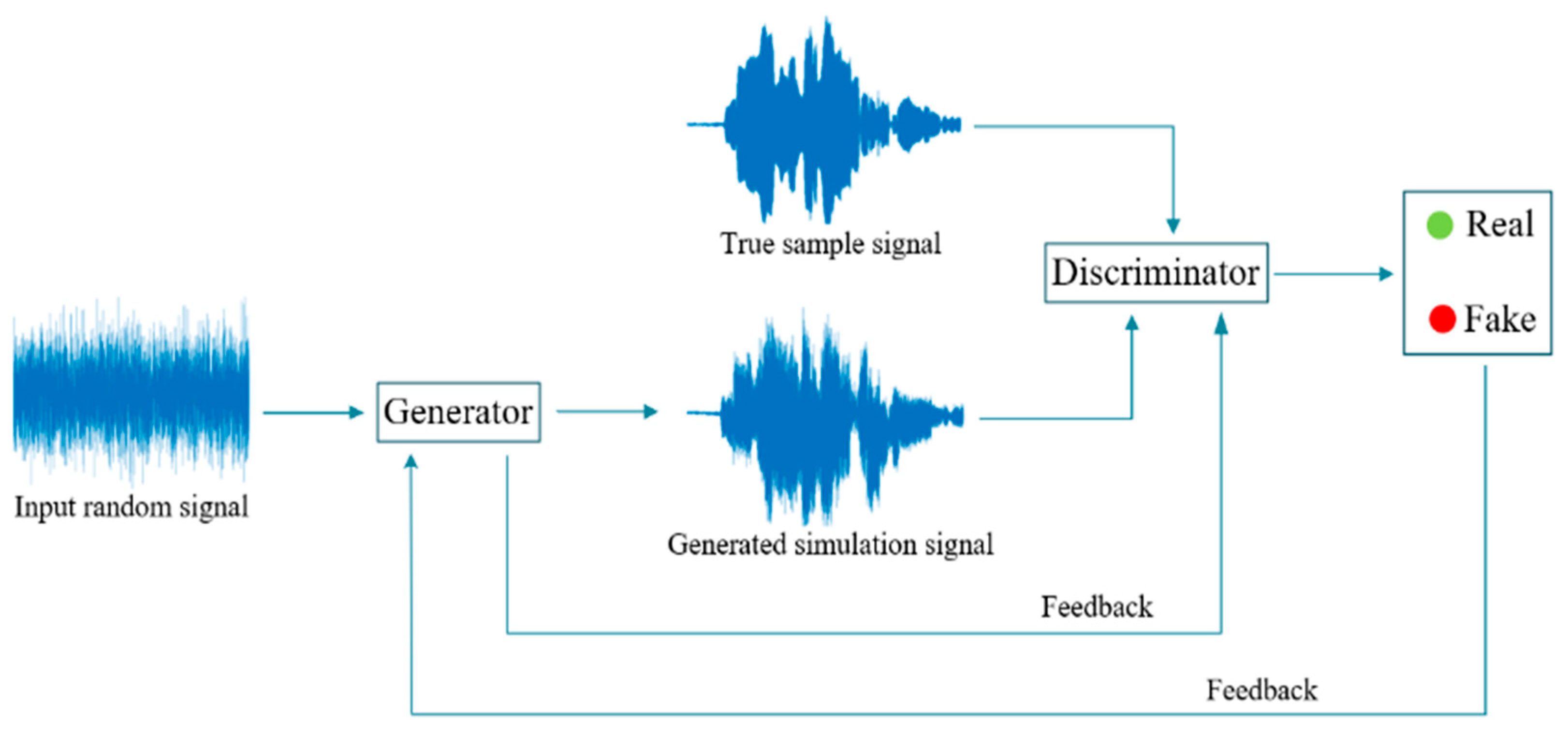
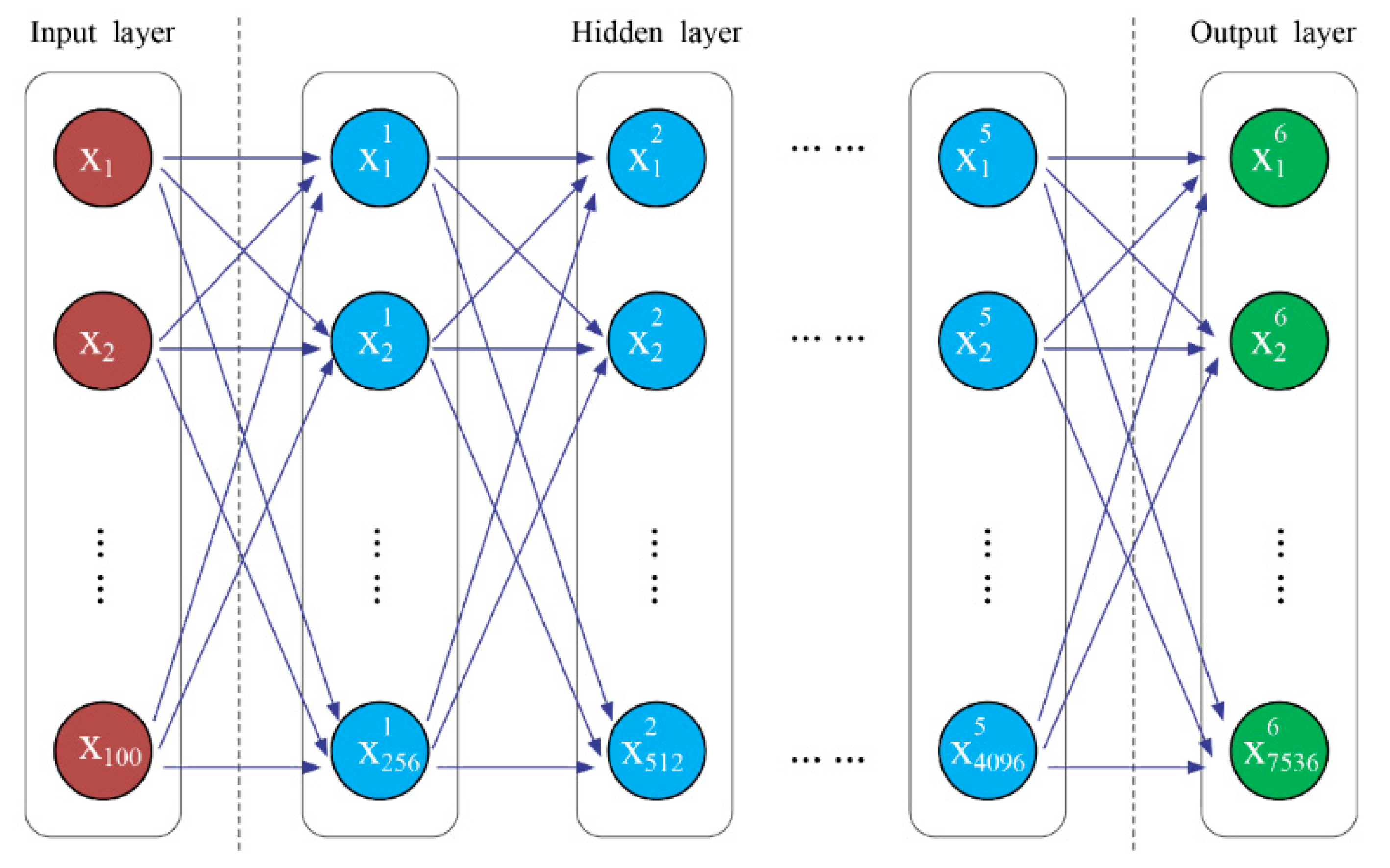
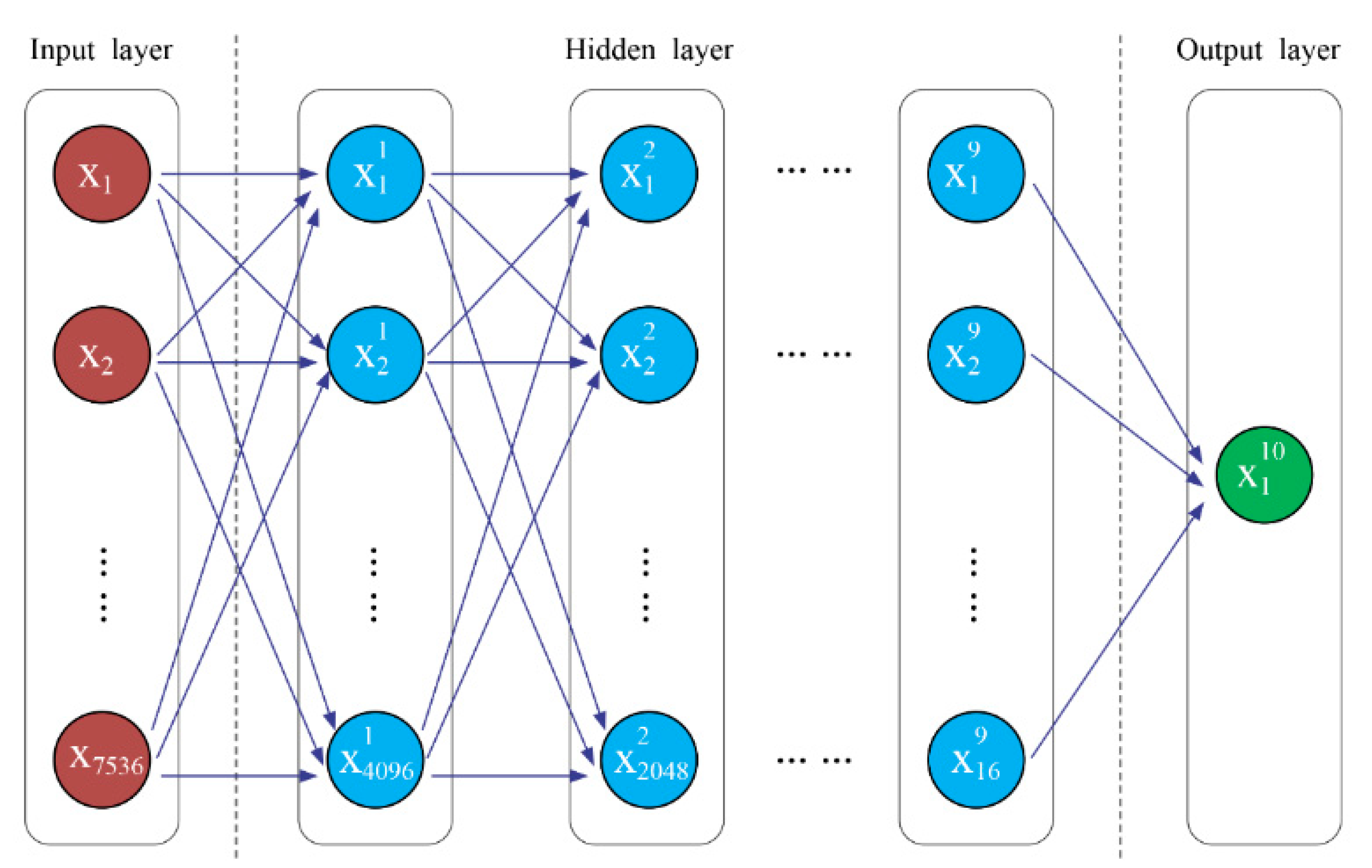
2.2. Generative Adversarial Network
2.2.1. The Strategy of the GAN
2.2.2. The Loss Function of the GAN
2.2.3. The Training of the GAN
2.3. The GAN Reverberation Simulation Method
2.4. The Holistic Research Approach
3. Simulation
3.1. The Simulation Based on the Point-Scattering Method
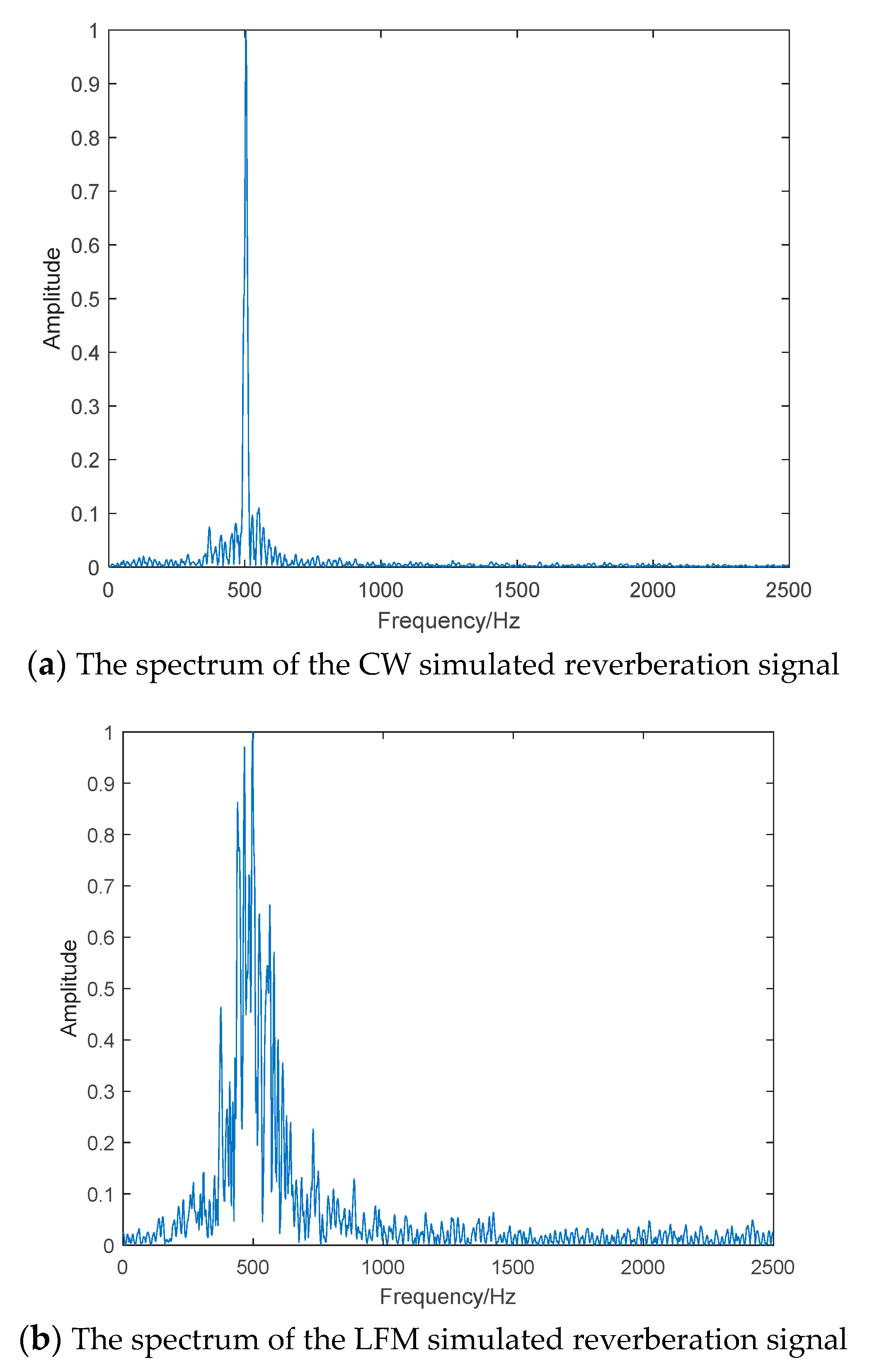
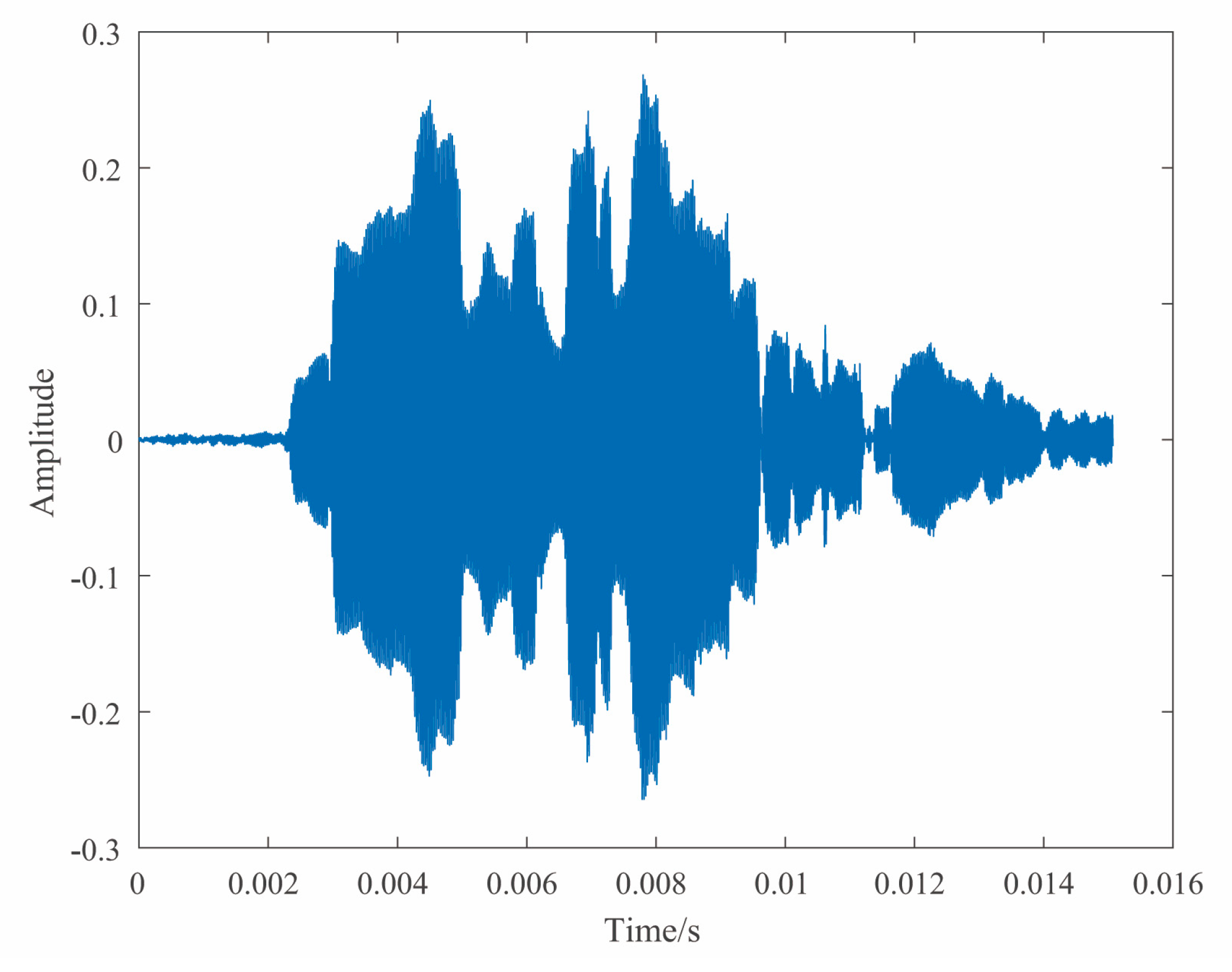
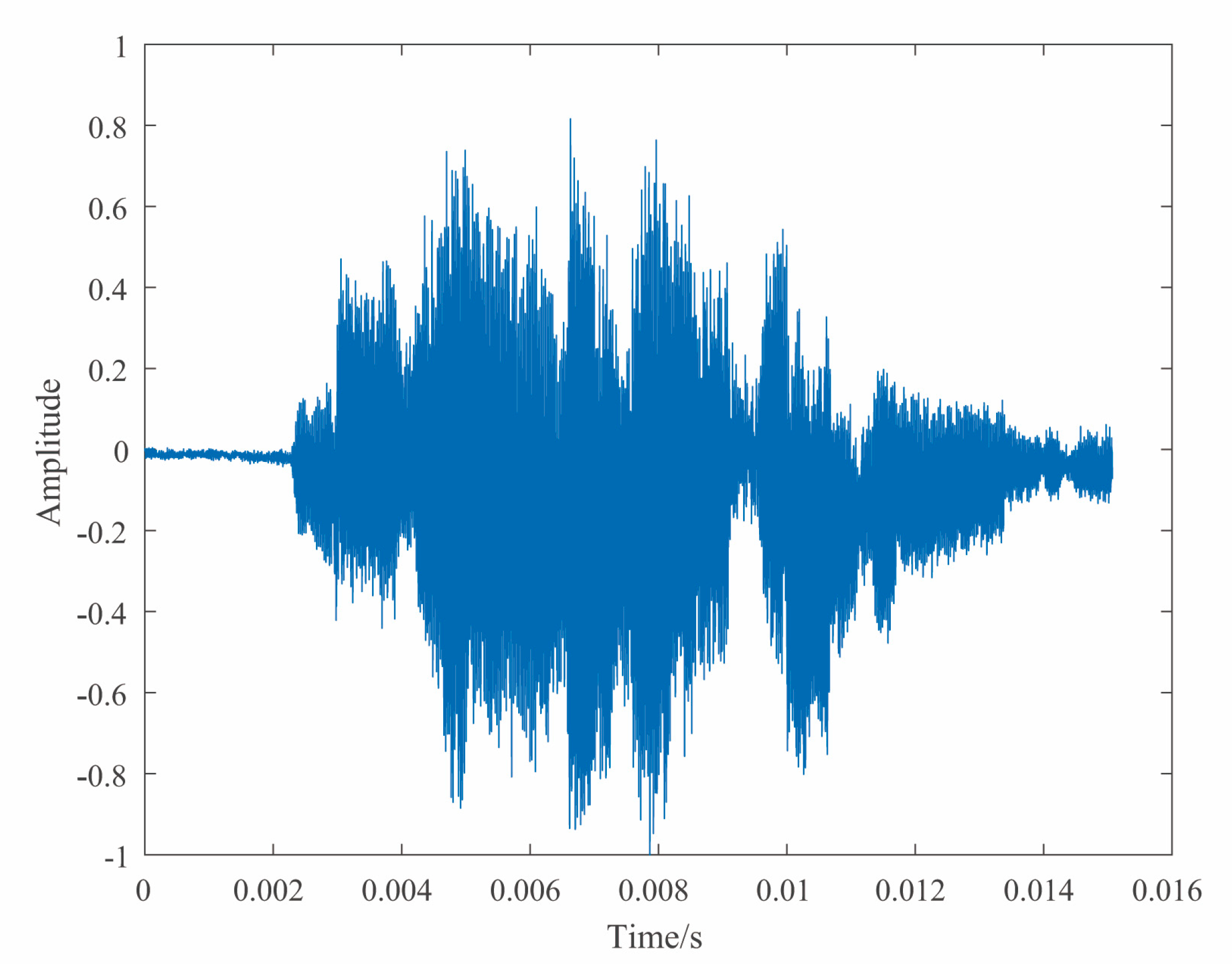
3.1.1. Time–Frequency Characteristics of the Reverberation Signal
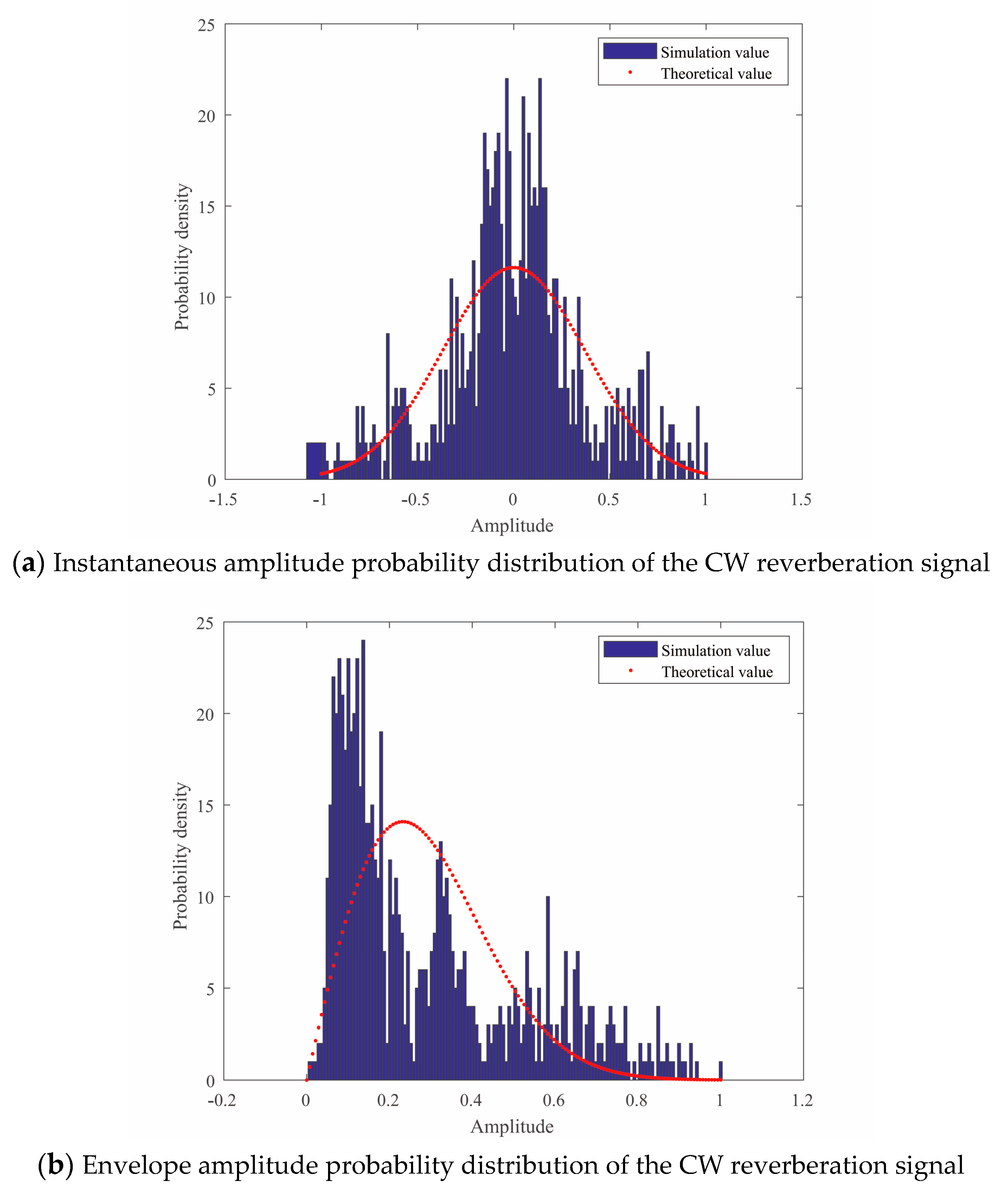
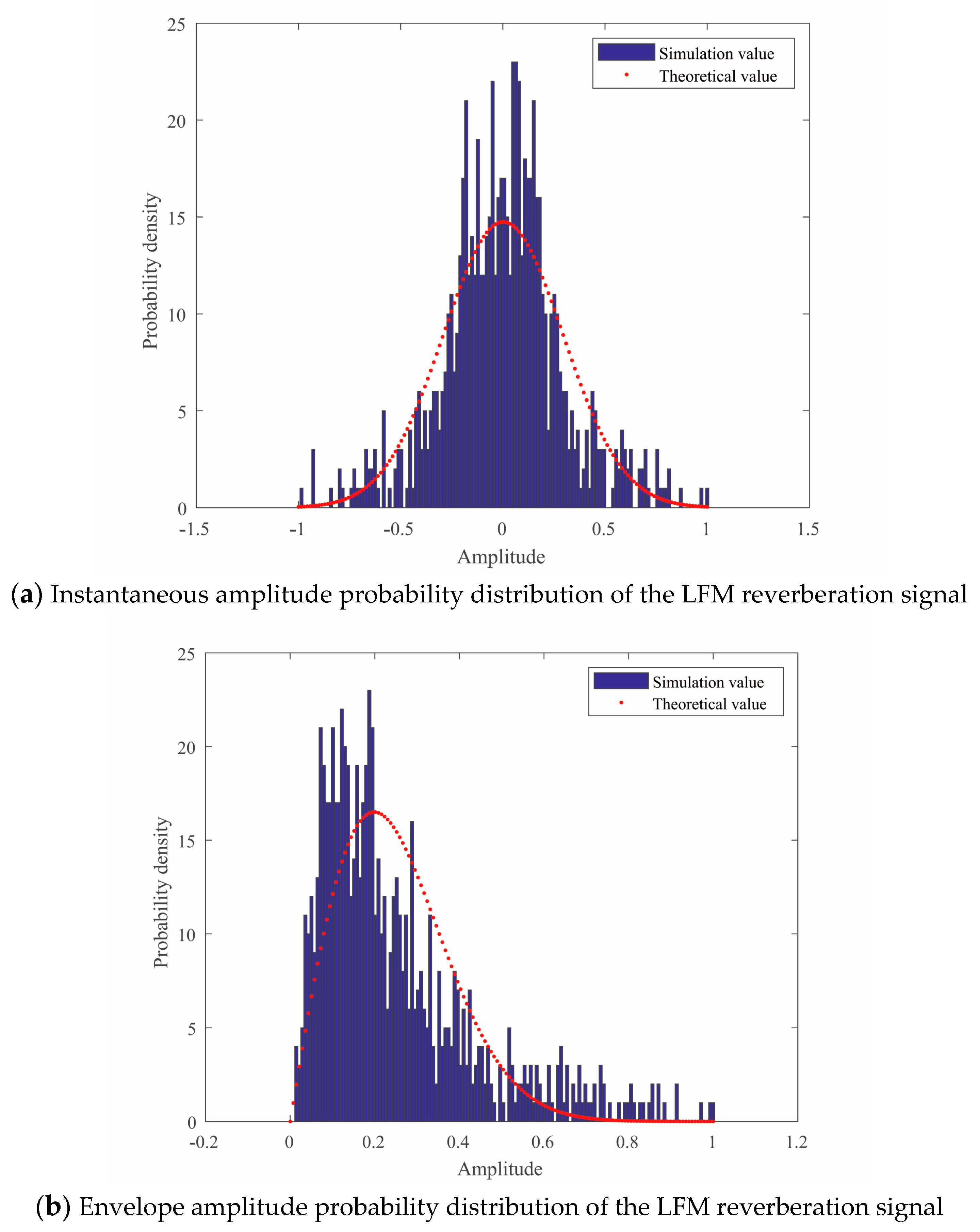
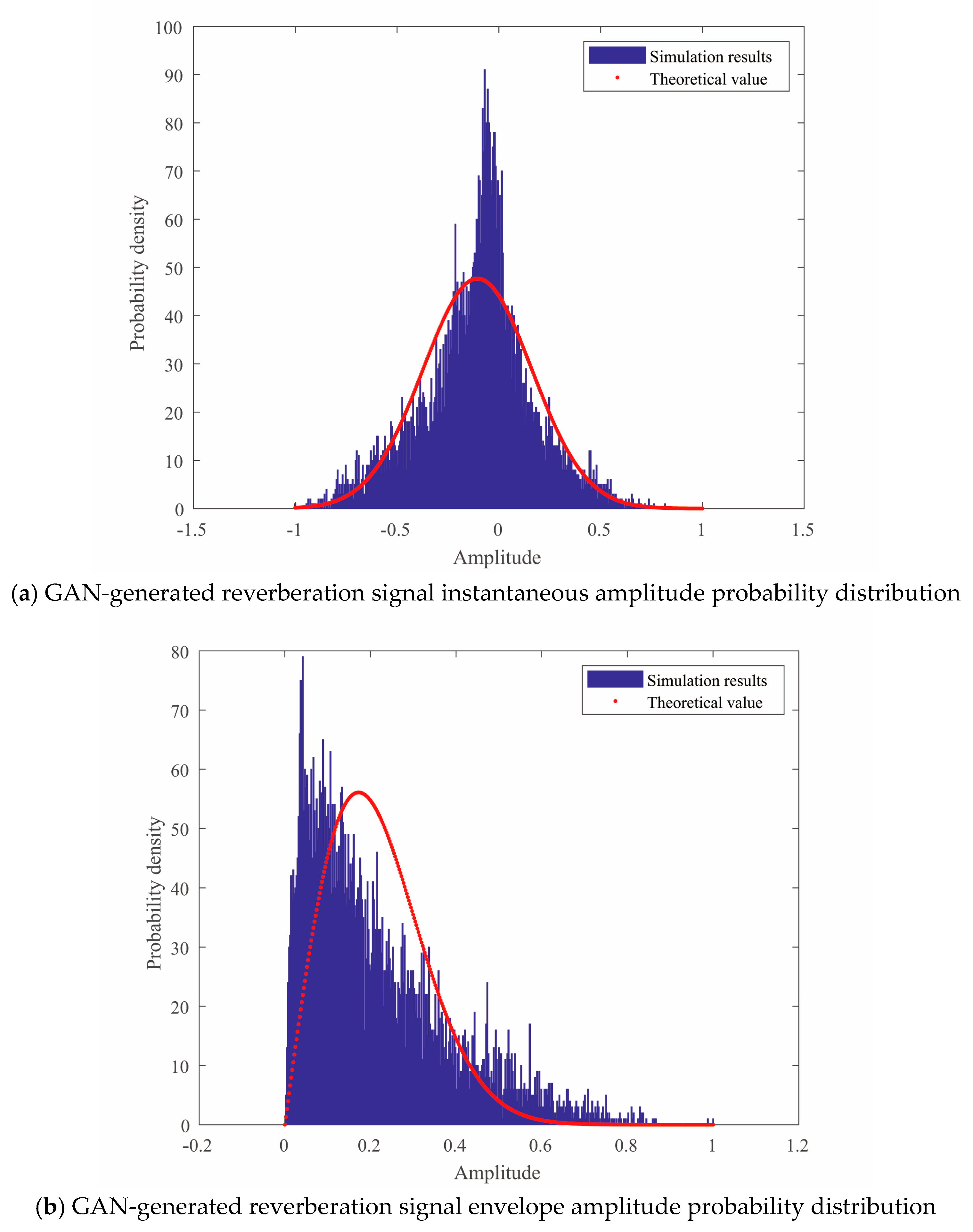
3.1.2. Statistical Characteristics of the Reverberation Simulation
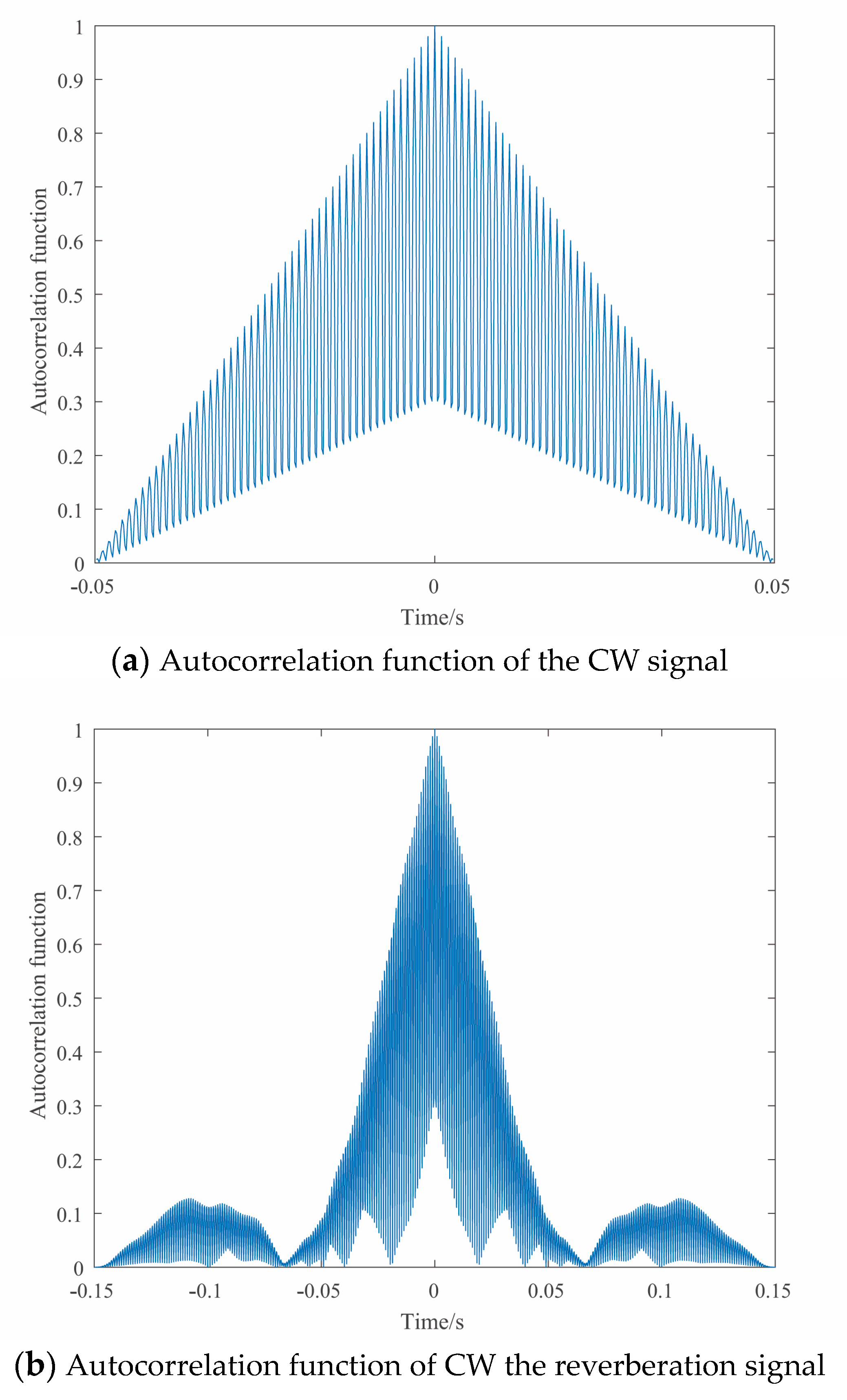
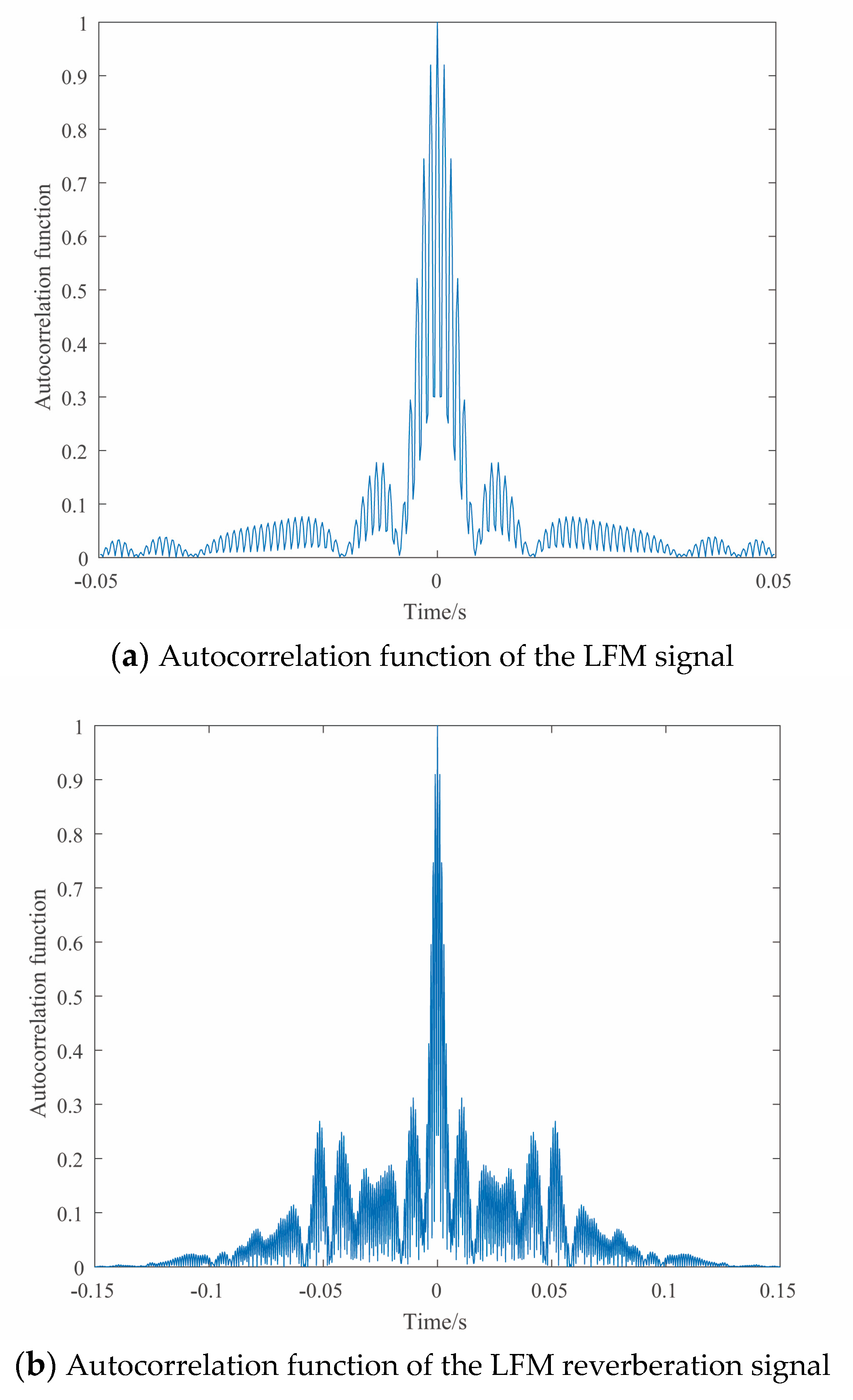
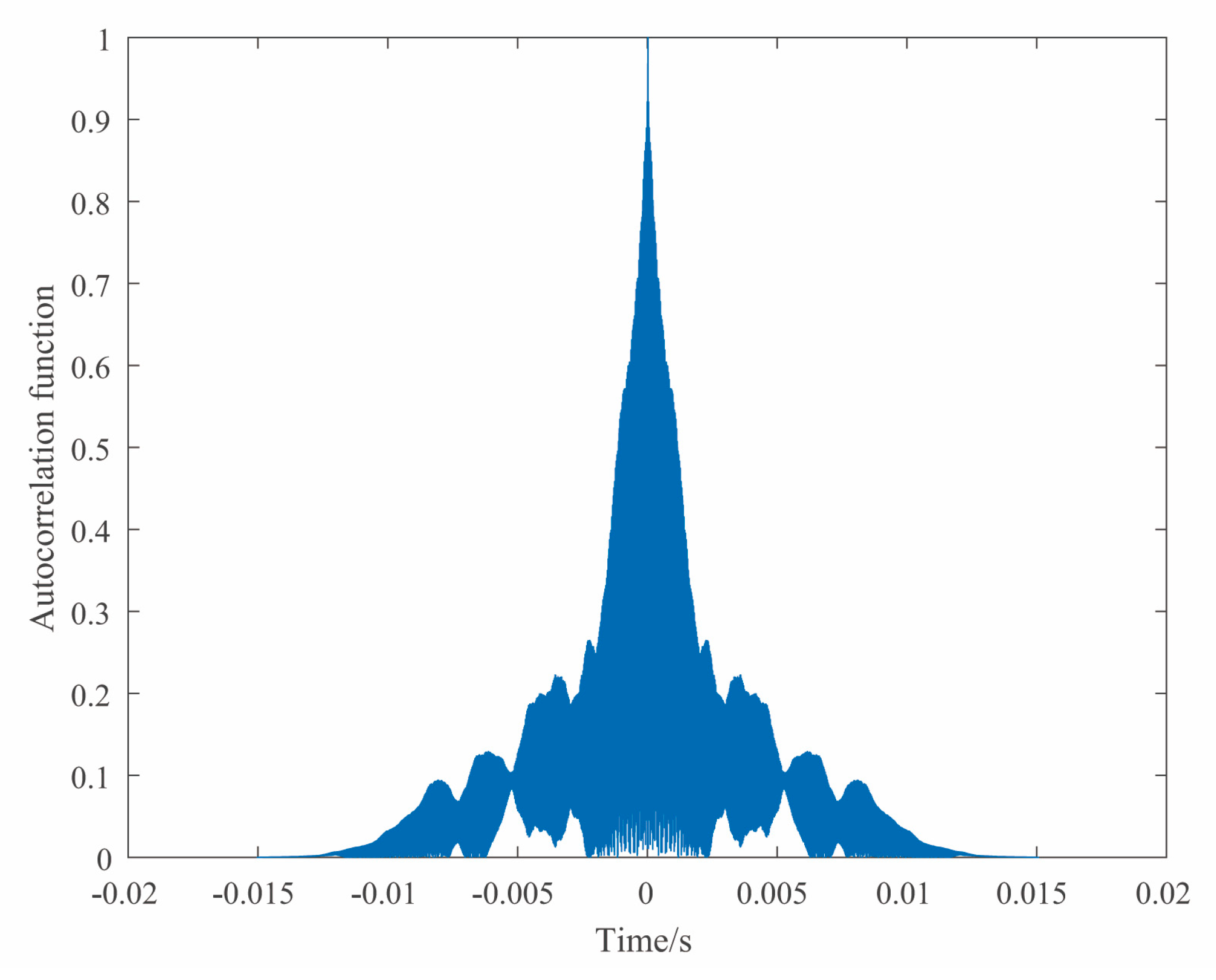
3.1.3. Time Domain Correlation Characteristics of the Reverberation Simulation
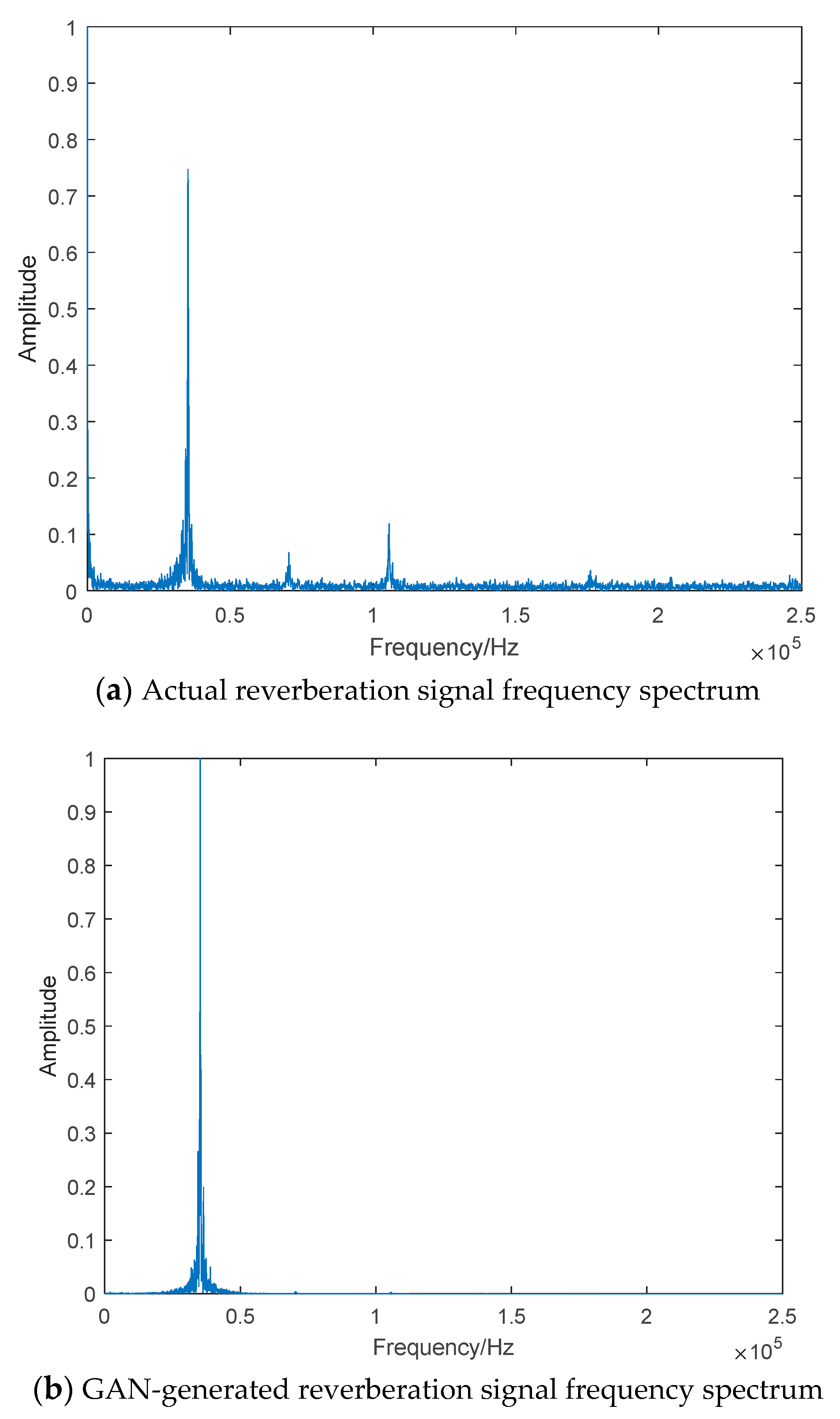
3.2. The Simulation Based the GAN
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kun, X.; Wang, Q.Y. Blind Separability of Reverberation and Target Echo Based on Spatial Correlation. Appl. Mech. Mater. 2011, 128–129, 538–543. [Google Scholar]
- Li, P.; Qiu, H.; Wang, C.; Wu, Y.; Miao, F. Research on Reverberation Cancellation Algorithm Based on Empirical Mode Decomposition. In Proceedings of the 2020 IEEE International Conference on Information Technology, Big Data and Artificial Intelligence, Chongqing, China, 6–8 November 2020. [Google Scholar]
- Shang, E.C.; Gao, T.; Wu, J. A Shallow-Water Reverberation Model Based on Perturbation Theory. IEEE J. Ocean. Eng. 2008, 33, 451–461. [Google Scholar] [CrossRef]
- Katsnelson, B.; Petnikov, V.; Lynch, J. Low-Frequency Bottom Reverberation in Shallow Water. In Fundamentals of Shallow Water Acoustics; Springer: New York, NY, USA, 2012; pp. 239–266. [Google Scholar]
- Badeau, R. Unified Stochastic Reverberation Modeling. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 2175–2179. [Google Scholar]
- Etter, P.C. Underwater Acoustic Modeling and Simulation; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Lee, K.; Chu, Y.; Seong, W. Geometrical Ray-Bundle Reverberation Modeling. J. Comput. Acoust. 2013, 21, 1350011. [Google Scholar] [CrossRef]
- Bucker, H.P.; Morris, H.E. Normal-Mode Reverberation in Channels or Ducts. J. Acoust. Soc. Am. 1968, 44, 827–828. [Google Scholar] [CrossRef]
- Bjørnø, L.; Neighbors, T.; Bradley, D. Applied Underwater Acoustics; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Ellis, D.D.; Yang, J.; Preston, J.R.; Pecknold, S. A Normal Mode Reverberation and Target Echo Model to Interpret Towed Array Data in the Target and Reverberation Experiments. IEEE J. Ocean. Eng. 2017, 42, 344–361. [Google Scholar] [CrossRef]
- Collis, J.M.; Frank, S.D.; Metzler, A.M.; Preston, K.S. Elastic Parabolic Equation and Normal Mode Solutions for Seismo-Acoustic Propagation in Underwater Environments with Ice Covers. J Acoust Soc Am 2016, 139, 2672. [Google Scholar] [CrossRef]
- Hefner, B.T.; Hodgkiss, W. Reverberation Due to a Moving, Narrowband Source in an Ocean Waveguide. J. Acoust. Soc. Am. 2019, 146, 1661–1670. [Google Scholar] [CrossRef]
- Zuo, Y.; Gao, B.; Song, W.; Pang, J.; Mo, D. A Coupled Mode Method for Low Frequency Distant Reverberation in Deep Water Environment with Ice Covers. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021. [Google Scholar]
- Pang, J.; Gao, B.; Song, W.; Zuo, Y.; Mo, D. A Coupled Mode Reverberation Theory for Clutter Induced by Inhomogeneous Water Columns in Shallow Sea. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 526–529. [Google Scholar]
- Tang, D.; Hefner, B.; Jackson, D. Direct-Path Backscatter Measurements Along the Main Reverberation Track of Trex13. IEEE J. Ocean. Eng. 2019, 44, 972–983. [Google Scholar] [CrossRef]
- Li, N.; Zhang, M.; Gao, B. Horizontal Correlation of Long-Range Bottom Reverberation in Shallow Sloping Seabed. J. Mar. Sci. Eng. 2021, 9, 414. [Google Scholar] [CrossRef]
- Guigné, J.Y.; Blondel, P. Acoustic Investigation of Complex Seabeds; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Zhou, J.X.; Zhang, X.Z. Integrating the Energy Flux Method for Reverberation with Physics-Based Seabed Scattering Models: Modeling and Inversion. J. Acoust. Soc. Am. 2013, 134, 55–66. [Google Scholar] [CrossRef]
- Gao, B.; Wang, N.; Wang, H.Z. Investigation of Sea Surface Effect on Shallow Water Reverberation by Coupled Mode Method. J. Comput. Acoust. 2017, 25, 1750017. [Google Scholar] [CrossRef]
- Wu, X.; Liu, J.; Zhang, C. Research and Analysis on the Reverberation Scattering Characteristics for Active Sonar Echo Detection System. RISTI Rev. Iber. Sist. E Tecnol. Inf. 2016, E6, 197–209. [Google Scholar]
- Preuss, S.; Gurbuz, C.; Jelich, C.; Baydoun, S.K.; Marburg, S. Recent Advances in Acoustic Boundary Element Methods. J. Theor. Comput. Acoust. 2022, 30, 2240002. [Google Scholar] [CrossRef]
- Makris, N.C.; Ratilal, P. A Unified Model for Reverberation and Submerged Object Scattering in a Stratified Ocean Waveguide. J. Acoust. Soc. Am. 2001, 109, 909–941. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ivakin, A.N. Sound Scattering by Random Inhomogeneities of Stratified Ocean Sediments. Sov. Phys. Acoust.-USSR 1986, 32, 492–496. [Google Scholar]
- Ivakin, A.N. A Unified Approach to Volume and Roughness Scattering. J. Acoust. Soc. Am. 1998, 103, 827–837. [Google Scholar] [CrossRef]
- Mourad, P.D.; Jackson, D. A Model/Data Comparison for Low-Frequency Bottom Backscatter. J. Acoust. Soc. Am. 1993, 94, 344–358. [Google Scholar] [CrossRef]
- Galinde, A.; Donabed, N.; Andrews, M.; Lee, S.; Makris, N.; Ratilal, P. Range-Dependent Waveguide Scattering Model Calibrated for Bottom Reverberation in a Continental Shelf Environment. J. Acoust. Soc. Am. 2008, 123, 1270–1281. [Google Scholar] [CrossRef] [Green Version]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- Chan, E.R.; Monteiro, M.; Kellnhofer, P.; Wu, J.; Wetzstein, G. Pi-Gan: Periodic Implicit Generative Adversarial Networks for 3d-Aware Image Synthesis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–15 June 2021. [Google Scholar]
- Hudson, D.A.; Zitnick, L. Generative Adversarial Transformers. In Proceedings of the International Conference on Machine Learning, Virtual, 18–24 July 2021. [Google Scholar]
- Shen, Y.; Zhou, B. Closed-Form Factorization of Latent Semantics in Gans. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–15 June 2021. [Google Scholar]
- Wang, X.; Yu, K.; Wu, S.; Gu, J.; Liu, Y.; Dong, C.; Qiao, Y.; Loy, C.C. Esrgan: Enhanced Super-Resolution Generative Adversarial Networks. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Zhan, F.; Zhu, H.; Lu, S. Spatial Fusion Gan for Image Synthesis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Dong, H.-W.; Yang, Y.-H. Convolutional Generative Adversarial Networks with Binary Neurons for Polyphonic Music Generation. arXiv 2018, arXiv:1804.09399. [Google Scholar]
- Kumar, K.; Kumar, R.; de Boissiere, T.; Gestin, L.; Teoh, W.Z.; Sotelo, J.; de Brébisson, A.; Bengio, Y.; Courville, A. Melgan: Generative Adversarial Networks for Conditional Waveform Synthesis. In Proceedings of the Advances in neural information processing systems, Vancouver, BC, Canada, 8–14 December 2019; Volume 32. [Google Scholar]
- Ratnarajah, A.; Tang, Z.; Manocha, D. Ir-Gan: Room Impulse Response Generator for Far-Field Speech Recognition. arXiv 2020, arXiv:2010.13219. [Google Scholar]
- Abraham, D.A.; Lyons, A. Simulation of Non-Rayleigh Reverberation and Clutter. IEEE J. Ocean. Eng. 2004, 29, 347–362. [Google Scholar] [CrossRef]
- Guo, X.-Y.; Su, S.-J.; Wang, Y.-K.; Chen, J.-Y. Research on Simulating Seafloor Reverberation in the Case of Monostatic. J. Natl. Univ. Def. Technol. 2010, 32, 141–145. [Google Scholar]
- Ivakin, A.; Williams, K. Mid-Frequency Propagation and Reverberation in a Deep Ice-Covered Ocean: Modeling and Data Analysis. Proc. Meet. Acoust. 2020, 42, 070004. [Google Scholar]
- Xia, K.; Yin, H.; Qian, P.; Jiang, Y.; Wang, S. Liver Semantic Segmentation Algorithm Based on Improved Deep Adversarial Networks in Combination of Weighted Loss Function on Abdominal Ct Images. IEEE Access 2019, 7, 96349–96358. [Google Scholar] [CrossRef]
- Ye, H.; Li, G.Y.; Juang, B.-H.F.; Sivanesan, K. Channel Agnostic End-to-End Learning Based Communication Systems with Conditional Gan. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018. [Google Scholar]
- Kim, H.Y.; Yoon, J.W.; Cheon, S.J.; Kang, W.H.; Kim, N.S. A Multi-Resolution Approach to Gan-Based Speech Enhancement. Appl. Sci. 2021, 11, 721. [Google Scholar] [CrossRef]
- Hui, J.; Sheng, X. Reverberation Channel. In Underwater Acoustic Channel; Springer: Berlin/Heidelberg, Germany, 2022; pp. 175–191. [Google Scholar]
- Xu, L.; Yang, K.; Yang, Q. Geoacoustic Inversion Using Physical–Statistical Bottom Reverberation Model in the Deep Ocean. Acoust. Aust. 2019, 47, 261–269. [Google Scholar] [CrossRef]
- Wang, M.; Feng, J.; Sun, C.; Bian, G. Analysis of Seafloor Reverberation Related Characteristics Based on Sea Trial Data. IOP Conf. Ser. Earth Environ. Sci. 2019, 310, 052062. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | CW | LFM |
|---|---|---|
| Center frequency (HZ) | 500 | 500 |
| Sampling frequency (HZ) | 5000 | 5000 |
| Bandwidth (HZ) | - | 200 |
| Beam angle (°) | 30 | 30 |
| Vertical scattering coefficient (dB) | −27 | −27 |
| Seawater absorption coefficient | 0 | 0 |
| Scatterer density | 20 | 20 |
| Sound speed (m/s) | 1500 | 1500 |
| Start time (s) | 0.08 | 0.08 |
| End time (s) | 0.23 | 0.23 |
| Pulse width (s) | 0.05 | 0.05 |
| Launch duration time (s) | 0.5 | 0.5 |
| Distance between the device and the seabed (m) | 50 | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, N.; Rao, X.; Zhao, J.; Wu, S.; Wang, M.; Wang, Y.; Qiu, B.; Zhu, Z.; Chen, Z.; Liu, T. A Shallow Seafloor Reverberation Simulation Method Based on Generative Adversarial Networks. Appl. Sci. 2023, 13, 595. https://doi.org/10.3390/app13010595
Hu N, Rao X, Zhao J, Wu S, Wang M, Wang Y, Qiu B, Zhu Z, Chen Z, Liu T. A Shallow Seafloor Reverberation Simulation Method Based on Generative Adversarial Networks. Applied Sciences. 2023; 13(1):595. https://doi.org/10.3390/app13010595
Chicago/Turabian StyleHu, Ning, Xin Rao, Jiabao Zhao, Shengjie Wu, Maofa Wang, Yangzhen Wang, Baochun Qiu, Zhenjing Zhu, Zitong Chen, and Tong Liu. 2023. "A Shallow Seafloor Reverberation Simulation Method Based on Generative Adversarial Networks" Applied Sciences 13, no. 1: 595. https://doi.org/10.3390/app13010595