
Variable Step Block Hybrid Method for Stiff Chemical Kinetics Problems

 , ,
, ,  ,
, 
Abstract
:1. Introduction
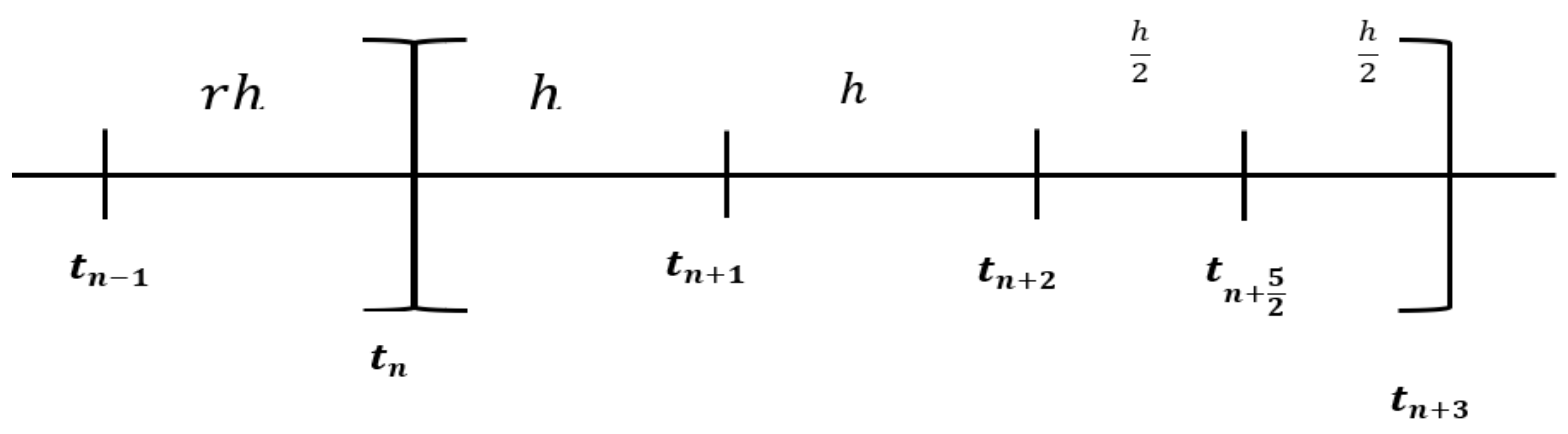
2. Formulation of 3–Point Variable Step Block Hybrid Method (3–Point VSBHM)
3. Stability Analysis of 3–Point VSBHM with Its Properties
3.1. Zero-Stability
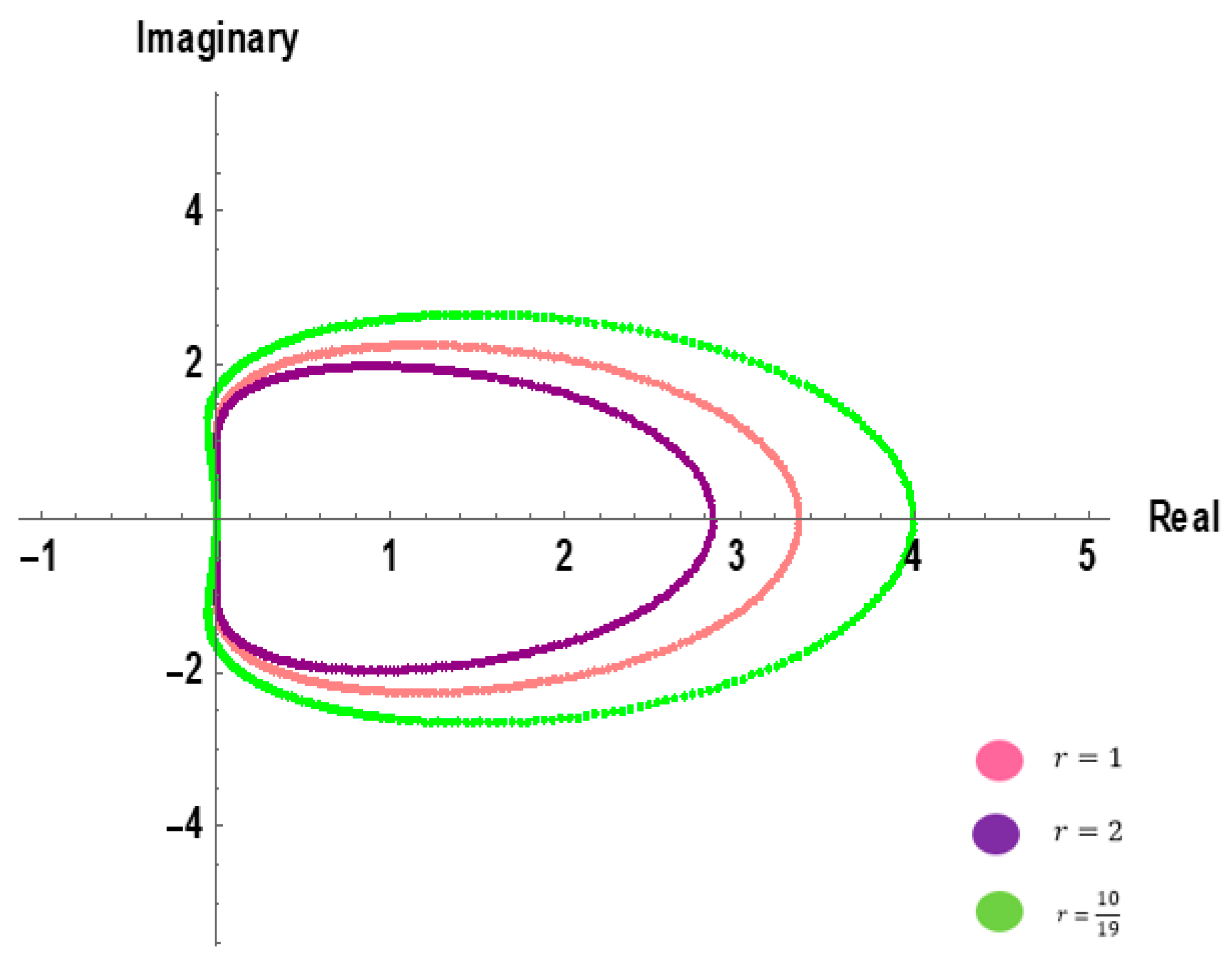
3.2. Stability Regions
4. Implementation of the 3–Point VSHBM and Selection of Step Size
4.1. Implementation of the 3–Point VSBHM
- (1)
- When a successful step occurs, a new step size will be determined. This new step size be either increased () or remain as in the previous step size . Each time the step size is increased, the new matrix Equations (24) and (25) are evaluated. If the step size remains as , there will be no calculations of new matrices and . Hence, it will skip the Jacobian evaluation process and the previous matrices and will be used to solve . This process is called partial Jacobian evaluation.
- (2)
- When a failure step occurs, the next step size will be half of the previous step size . Here the matrices and need to be updated with the new evaluations of the Jacobian matrix. This process is called full Jacobian evaluation.
4.2. Selection of Step Size
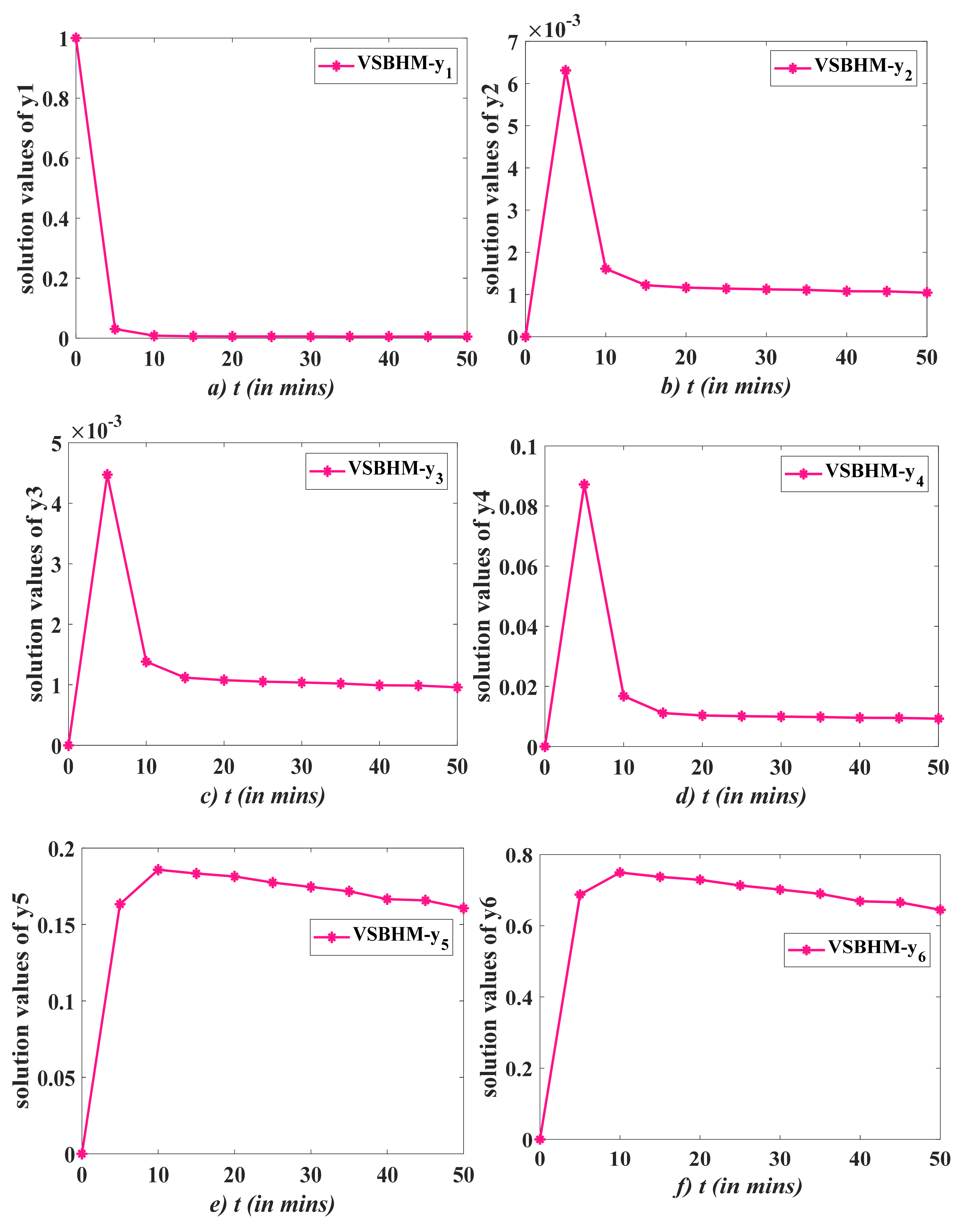
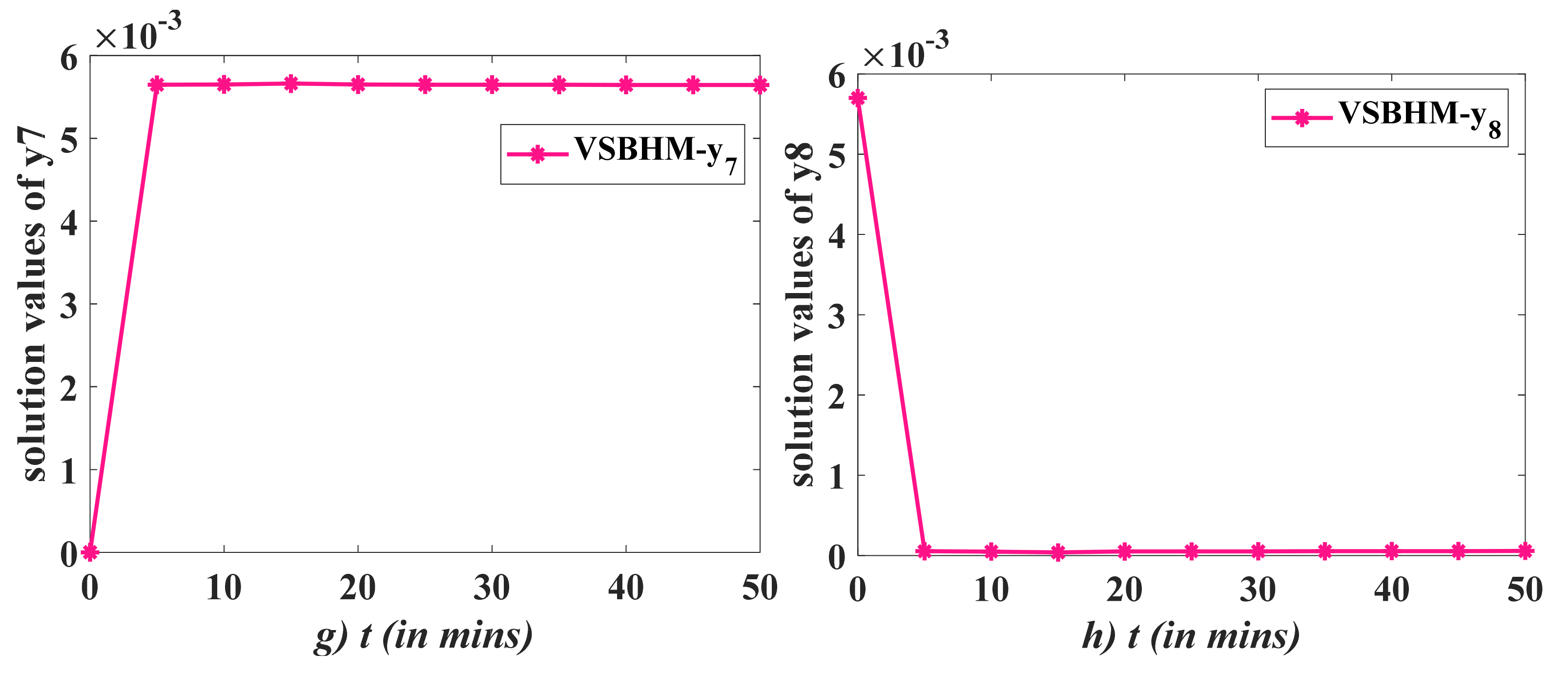
5. Test Problems
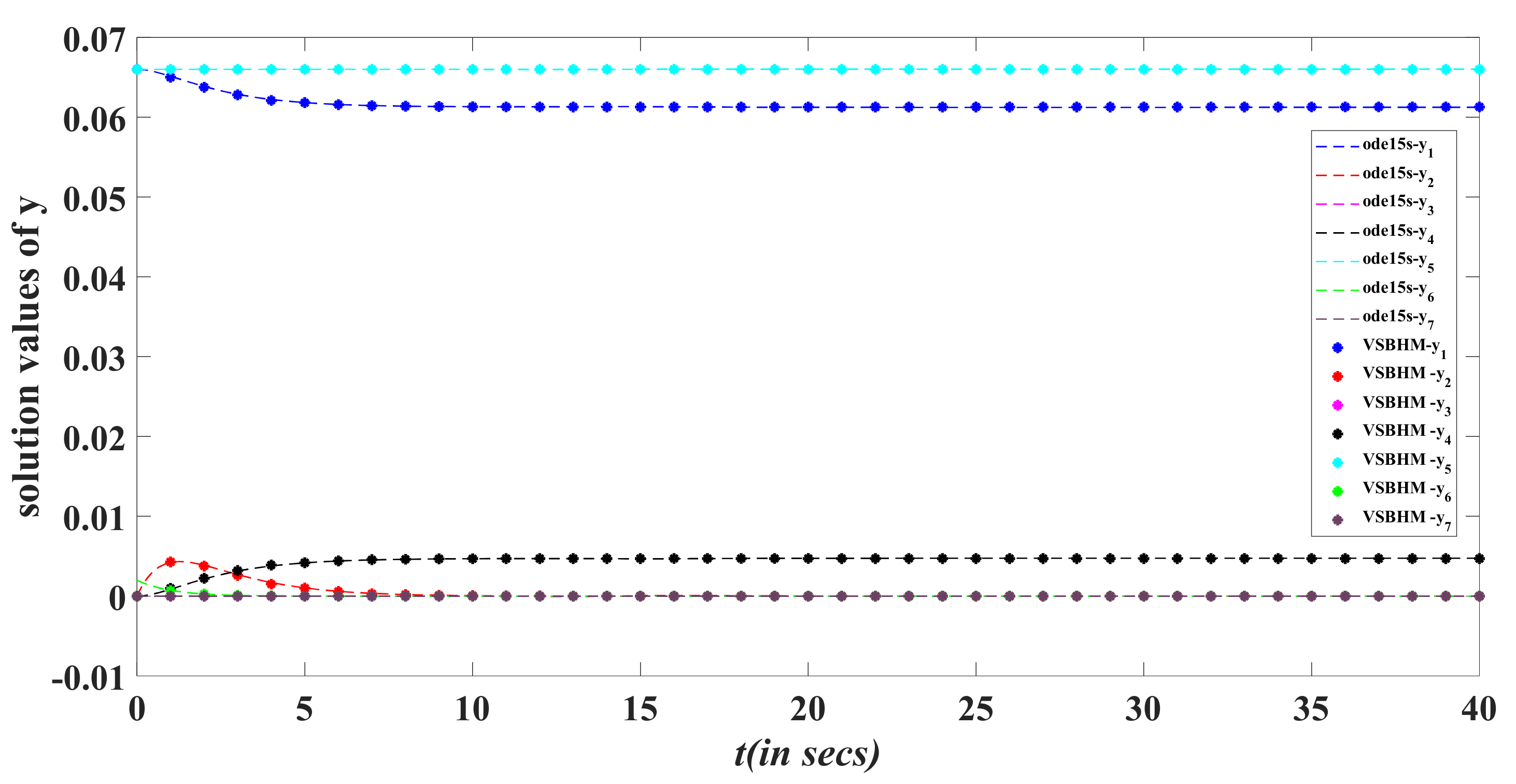
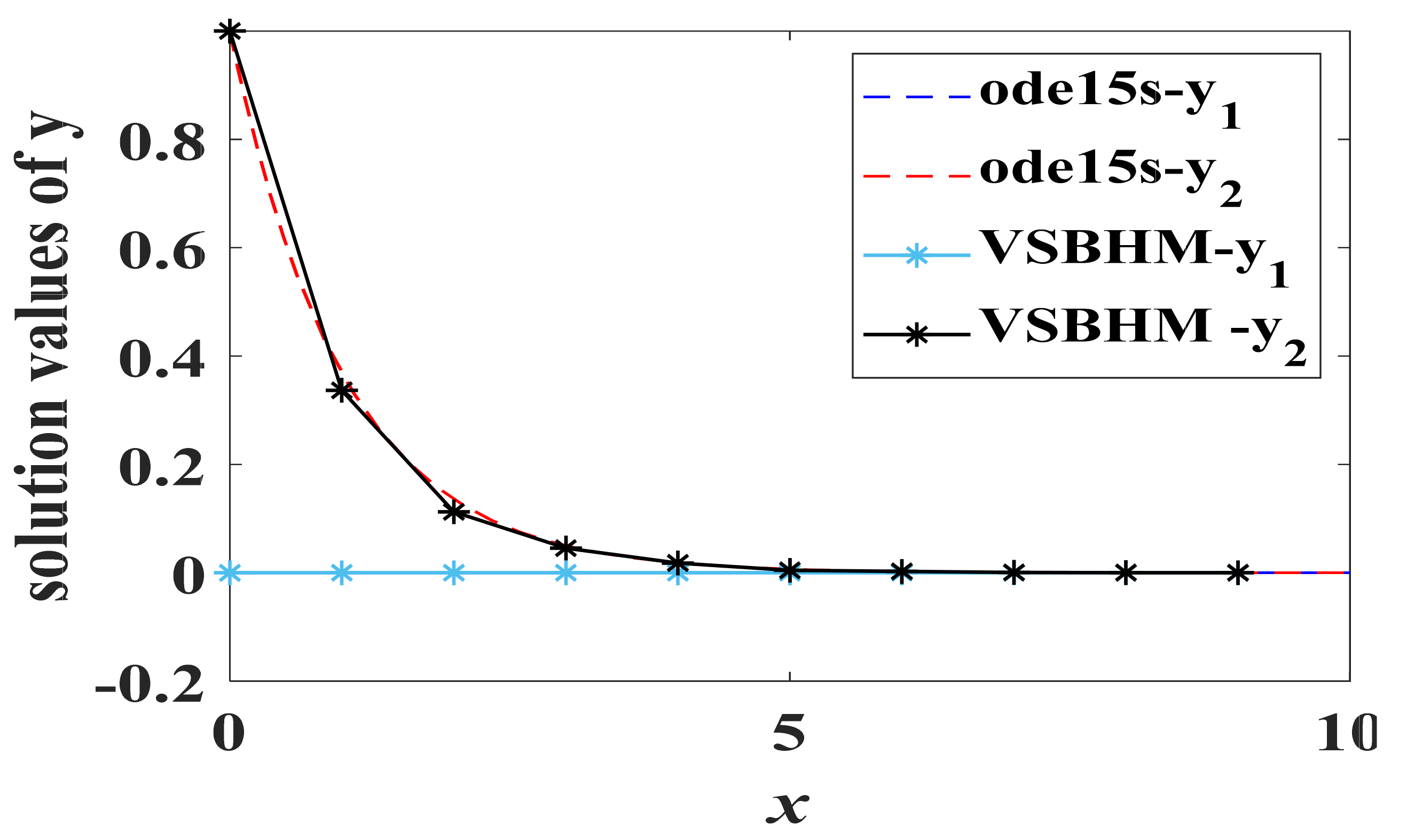
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- AL-Jawary, M.; Raham, R. Numerical solution for chemical kinetics system by using efficient iterative method. Int. J. Adv. Sci. Tech. Res. 2016, 1, 367–375. [Google Scholar]
- Shulyk, V.; Klymenko, O.; Svir, I. Numerical solution of stiff ODEs describing complex homogeneous chemical processes. J. Math. Chem. 2008, 43, 252–264. [Google Scholar] [CrossRef]
- Singh, J.; Kumar, D.; Baleanu, D. On the analysis of chemical kinetics system pertaining to a fractional derivative with Mittag-Leffler type kernel. Chaos 2017, 27, 103113. [Google Scholar] [CrossRef] [PubMed]
- Sacks-Davis, R. Fixed leading coefficient implementation of SD-formulas for stiff ODEs. ACM Trans. Math. Softw. (TOMS) 1980, 6, 540–562. [Google Scholar] [CrossRef]
- Yatim, S.; Ibrahim, Z.; Othman, K.; Suleiman, M. A quantitative comparison of numerical method for solving stiff ordinary differential equations. Math. Probl. Eng. 2011, 2021, 193691. [Google Scholar] [CrossRef]
- Mahmood, A.S.; Casasús, L.; Al-Hayani, W. The decomposition method for stiff systems of ordinary differential equations. Appl. Math. Comput. 2005, 167, 964–975. [Google Scholar] [CrossRef]
- Ibáñez, J.; Hernández, V.; Arias, E.; Ruiz, P.A. Solving initial value problems for ordinary differential equations by two approaches: BDF and piecewise-linearized methods. Comput. Phys. Commun. 2009, 180, 712–723. [Google Scholar] [CrossRef] [Green Version]
- Enright, W.H.; Hull, T.; Lindberg, B. Comparing numerical methods for stiff systems of ODE:s. BIT Numer. Math. 1975, 15, 10–48. [Google Scholar] [CrossRef]
- Seinfeld, J.H.; Lapidus, L.; Hwang, M. Review of numerical integration techniques for stiff ordinary differential equations. Ind. Eng. Chem. Fundam. 1970, 9, 266–275. [Google Scholar] [CrossRef]
- Bassenne, M.; Fu, L.; Mani, A. Time-Accurate and highly-Stable Explicit operators for stiff differential equations. J. Comput. Phys. 2021, 424, 109847. [Google Scholar] [CrossRef]
- Wu, H.; Ma, P.C.; Ihme, M. Efficient time-stepping techniques for simulating turbulent reactive flows with stiff chemistry. Comput. Phys. Commun. 2019, 243, 81–96. [Google Scholar] [CrossRef]
- Ola Fatunla, S. Block methods for second order ODEs. Int. J. Comput. Math. 1991, 41, 55–63. [Google Scholar] [CrossRef]
- Byrne, G.D.; Hindmarsh, A.C.; Jackson, K.R.; Brown, H.G. A comparison of two ode codes: Gear and episode. Comput. Chem. Eng. 1977, 1, 125–131. [Google Scholar] [CrossRef]
- Sandu, A.; Potra, F.; Carmichael, G.; Damian, V. Efficient Implementation of Fully Implicit Methods for Atmospheric Chemical Kinetics. J. Comput. Phys. 1996, 129, 101–110. [Google Scholar] [CrossRef]
- Zawawi, I.S.B.M. Block Backward Differentiation Alpha-Formula for Solving Stiff Ordinary Differential Equations. Ph.D. Thesis, Universitiy Putra Malaysia, Serdang, Malaysia, 2017. [Google Scholar]
- Zainuddin, N.; Ibrahim, Z.B.; Othman, K.I.; Suleiman, M. Direct fifth order block backward differentation formulas for solving second order ordinary differential equations. Chiang Mai J. Sci. 2016, 43, 1171–1181. [Google Scholar]
- Ibrahim, Z.B.; Isk, K.I.; Othman, A.; Suleiman, M. Variable step block backward differentiation formula for solving first order stiff ODEs. Proc. World Congr. Eng. 2007, 2, 1–5. [Google Scholar]
- Abasi, N.; Suleiman, M.; Abbasi, N.; Musa, H. 2-point block BDF metho d with off-step points for solving stiff ODEs. J. Soft Comput. Appl. 2014, 2014, 1–15. [Google Scholar]
- Suleiman, M.B.; Musa, H.; Ismail, F.; Senu, N. A new variable step size block backward differentiation formula for solving stiff initial value problems. Int. J. Comput. Math. 2013, 90, 2391–2408. [Google Scholar] [CrossRef]
- Zawawi, I.S.M.; Ibrahim, Z.B.; Othman, K.I. Derivation of diagonally implicit block backward differentiation formulas for solving stiff initial value problems. Math. Probl. Eng. 2015, 2015, 767328. [Google Scholar]
- Majid, Z.A.; Bin Suleiman, M.; Omar, Z. 3-point implicit block method for solving ordinary differential equations. Bull. Malays. Math. Sci. Soc. Second Ser. 2006, 29, 23–31. [Google Scholar]
- Shampine, L.F.; Watts, H. Block implicit one-step methods. Math. Comput. 1969, 23, 731–740. [Google Scholar] [CrossRef]
- Nasir, N.; Ibrahim, Z.B.; Othman, K.I.; Suleiman, M. Numerical solution of first order stiff ordinary differential equations using fifth order block backward differentiation formulas. Sains Malays. 2012, 41, 489–492. [Google Scholar]
- Majid, Z.A.; Suleiman, M.; Ismail, F.; Othman, M. 2-point implicit block one-step method half Gauss-Seidel for solving first order ordinary differential equations. Mat. Malays. J. Ind. Appl. Math. 2003, 19, 91–100. [Google Scholar]
- Bakari, I.A.; Babuba, S.; Tumba, P.; Danladi, A. Two-step hybrid block backward differentiation formulae for the solution of stiff ordinary differential equations. Fudma J. Sci. 2020, 4, 668–676. [Google Scholar]
- Kashkari, B.S.; Syam, M.I. Optimization of one step block method with three hybrid points for solving first-order ordinary differential equations. Results Phys. 2019, 12, 592–596. [Google Scholar] [CrossRef]
- Kumleng, G.M.; Adee, S.; Skwame, Y. Implicit two step Adam-Moulton hybrid block method with two offstep points for solving stiff ordinary differential equations. J. Nat. Sci. Res. 2013, 3, 77–82. [Google Scholar]
- Sunday, J.; Odekunle, M.R.; Adesanya, A.O.; James, A.A. Extended block integrator for first-order stiff and oscillatory differential equations. Am. J. Comput. Appl. Math. 2013, 3, 283–290. [Google Scholar]
- Sunday, J.; Odekunle, M.R.; Adesanya, A.O. Order six block integrator for the solution of first-order ordinary differential equations. Int. J. Math. Soft Comput. 2013, 3, 87–96. [Google Scholar] [CrossRef] [Green Version]
- Adebayo, K.; Umar, A. Generalized rational approximation method via pade approximants for the solutions of IVPs with singular solutions and stiff differential equations. J. Math. Sci. 2013, 2, 327–368. [Google Scholar]
- Adesanya, A.O.; Odekunle, M.R.; James, A.A. Starting hybrid Stomer-Cowell more accurately by hybrid Adams method for the solution of first order ordinary differential equations. Euro. J. Sci. Res. 2012, 77, 580–588. [Google Scholar]
- Skwame, Y.; Sunday, J.; Ibijola, E.A. L-Stable Block Hybrid Simpson’s Methods for Numerical Solution of Initial Value Problems in Stiff Ordinary Differential Equations. Int. J. Pure Appl. Sci. Technol. 2012, 11, 45–54. [Google Scholar]
- Yakubu, D.; Madaki, A.; Kwami, A. Stable two-step Runge-Kutta collocation methods for oscillatory systems of IVPs in ODEs. Amer. J. Comput. Appl. Math. 2013, 3, 119–130. [Google Scholar]
- Yatim, S.; Ibrahim, Z.; Othman, K.; Ismail, F. Fifth order variable step block backward differentiation formulae for solving stiff ODEs. Int. J. Math. Comput. Sci. 2010, 4, 235–237. [Google Scholar]
- Ibrahim, Z.B.; Nasir, N.A.A.M. Convergence of the 2-point block backward differentiation formulas. Appl. Math. Sci. 2011, 5, 3473–3480. [Google Scholar]
- Dahlquist, G.G. A special stability problem for linear multistep methods. BIT Numer. Math. 1963, 3, 27–43. [Google Scholar] [CrossRef]
- Khalsaraei, M.M.; Shokri, A.; Molayi, M. The new class of multistep multiderivative hybrid methods for the numerical solution of chemical stiff systems of first order IVPs. J. Math. Chem. 2020, 58, 1987–2012. [Google Scholar] [CrossRef]
- Schäfer, E. A new approach to explain the “high irradiance responses” of photomorphogenesis on the basis of phytochrome. J. Math. Biol. 1975, 2, 41–56. [Google Scholar] [CrossRef]
- Gottwald, B. MISS-ein einfaches simulations-system für biologische und chemische prozesse. EDV Med. Und Biol. 1977, 3, 85–90. [Google Scholar]
- Amat, S.; Legaz, M.J.; Ruiz-Álvarez, J. On a Variational Method for Stiff Differential Equations Arising from Chemistry Kinetics. Mathematics 2019, 7, 459. [Google Scholar] [CrossRef] [Green Version]
- Aslam, M.; Farman, M.; Ahmad, H.; Gia, T.N.; Ahmad, A.; Askar, S. Fractal fractional derivative on chemistry kinetics hires problem. AIMS Math. 2022, 7, 1155–1184. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step Size Ratio | Block Points | Formulae 3-Point VSBHM |
|---|---|---|
| Step Size Ratio | Roots |
|---|---|
| . | |
| ,, and . | |
| ,, and |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soomro, H.; Zainuddin, N.; Daud, H.; Sunday, J.; Jamaludin, N.; Abdullah, A.; Apriyanto, M.; Kadir, E.A. Variable Step Block Hybrid Method for Stiff Chemical Kinetics Problems. Appl. Sci. 2022, 12, 4484. https://doi.org/10.3390/app12094484
Soomro H, Zainuddin N, Daud H, Sunday J, Jamaludin N, Abdullah A, Apriyanto M, Kadir EA. Variable Step Block Hybrid Method for Stiff Chemical Kinetics Problems. Applied Sciences. 2022; 12(9):4484. https://doi.org/10.3390/app12094484
Chicago/Turabian StyleSoomro, Hira, Nooraini Zainuddin, Hanita Daud, Joshua Sunday, Noraini Jamaludin, Abdullah Abdullah, Mulono Apriyanto, and Evizal Abdul Kadir. 2022. "Variable Step Block Hybrid Method for Stiff Chemical Kinetics Problems" Applied Sciences 12, no. 9: 4484. https://doi.org/10.3390/app12094484