
Research on Damage Localization of Steel Truss–Concrete Composite Beam Based on Digital Orthoimage


Abstract
:Featured Application
Abstract
1. Introduction
2. Structural Damage Identification Method Based on Digital Image Processing
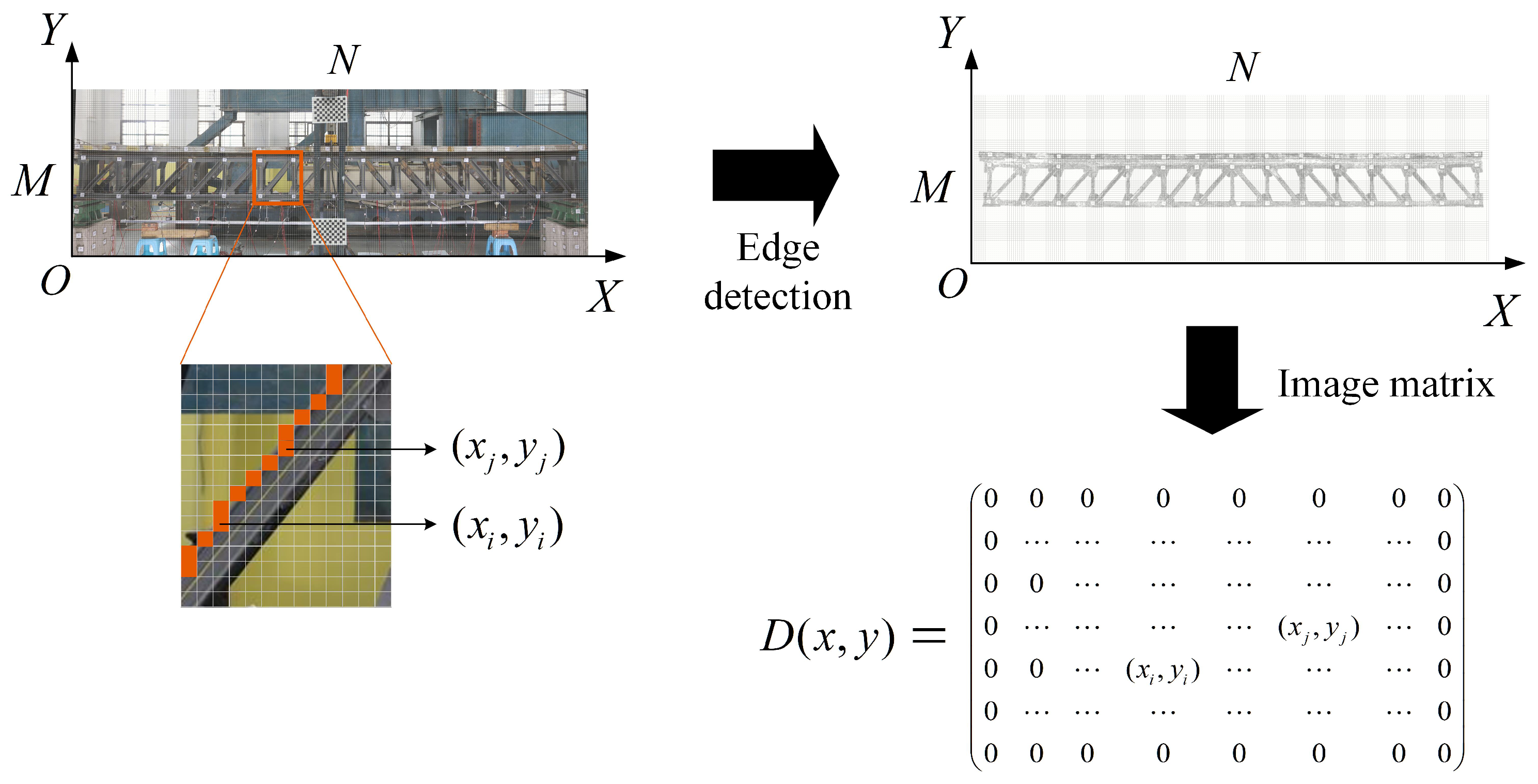
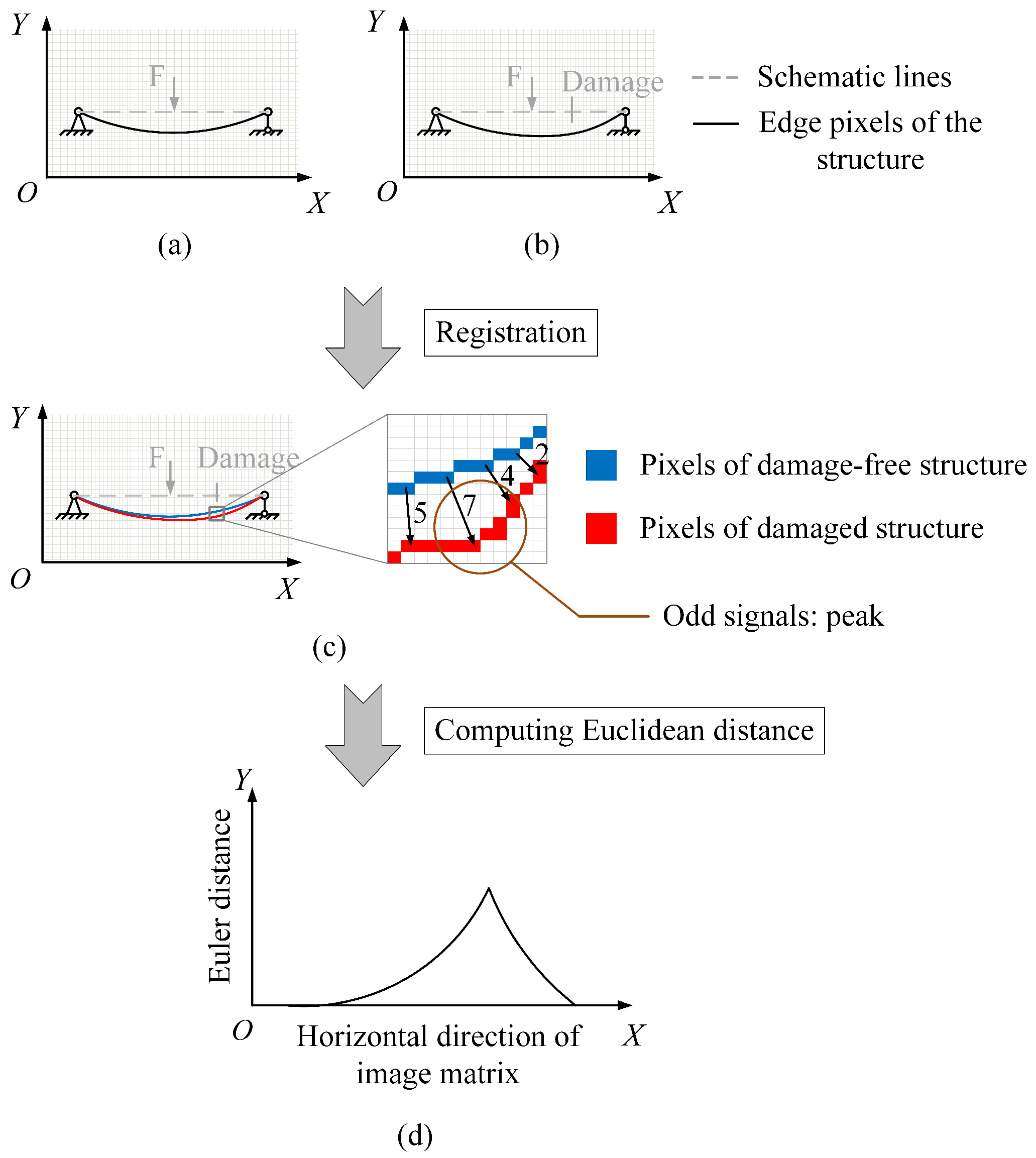
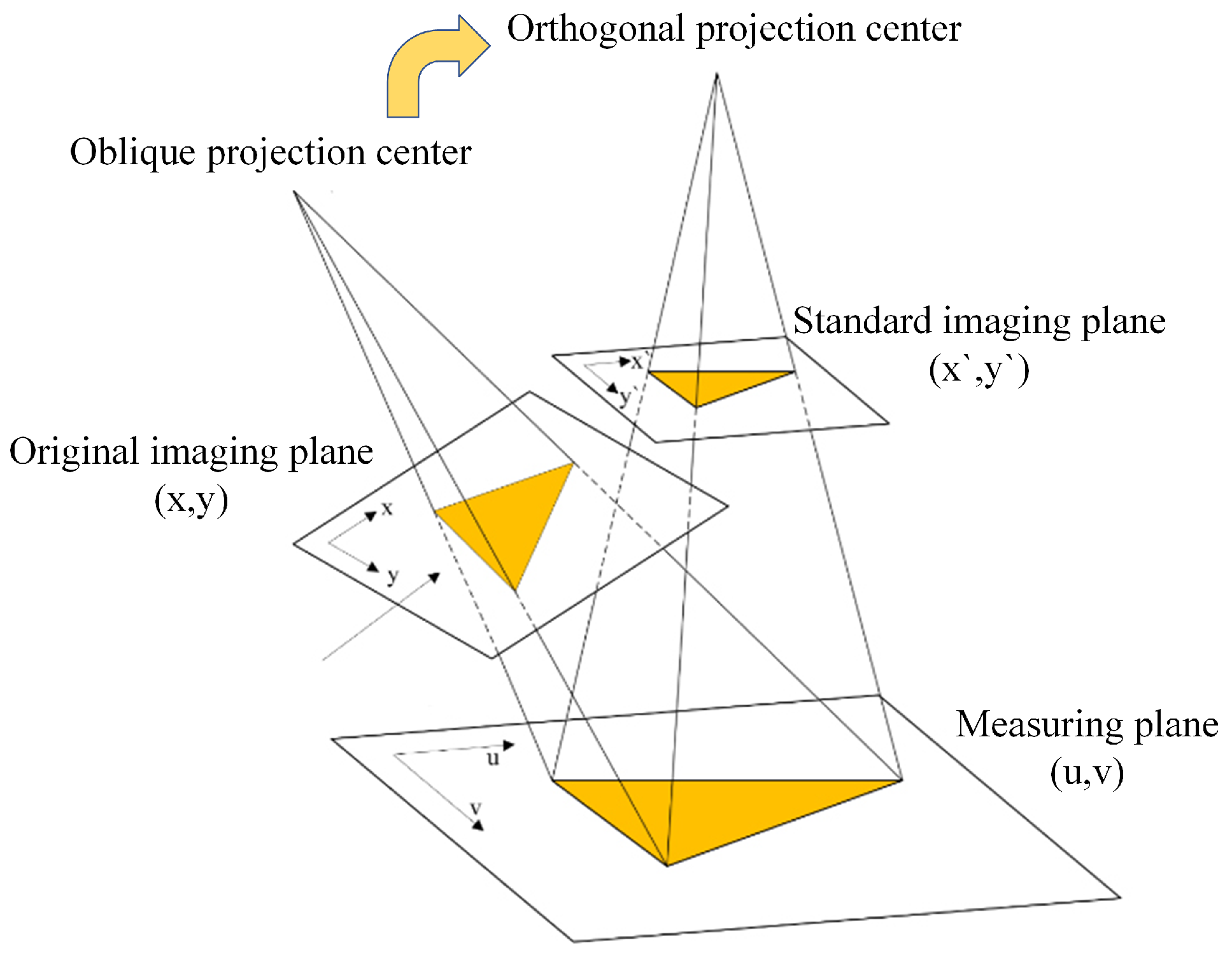
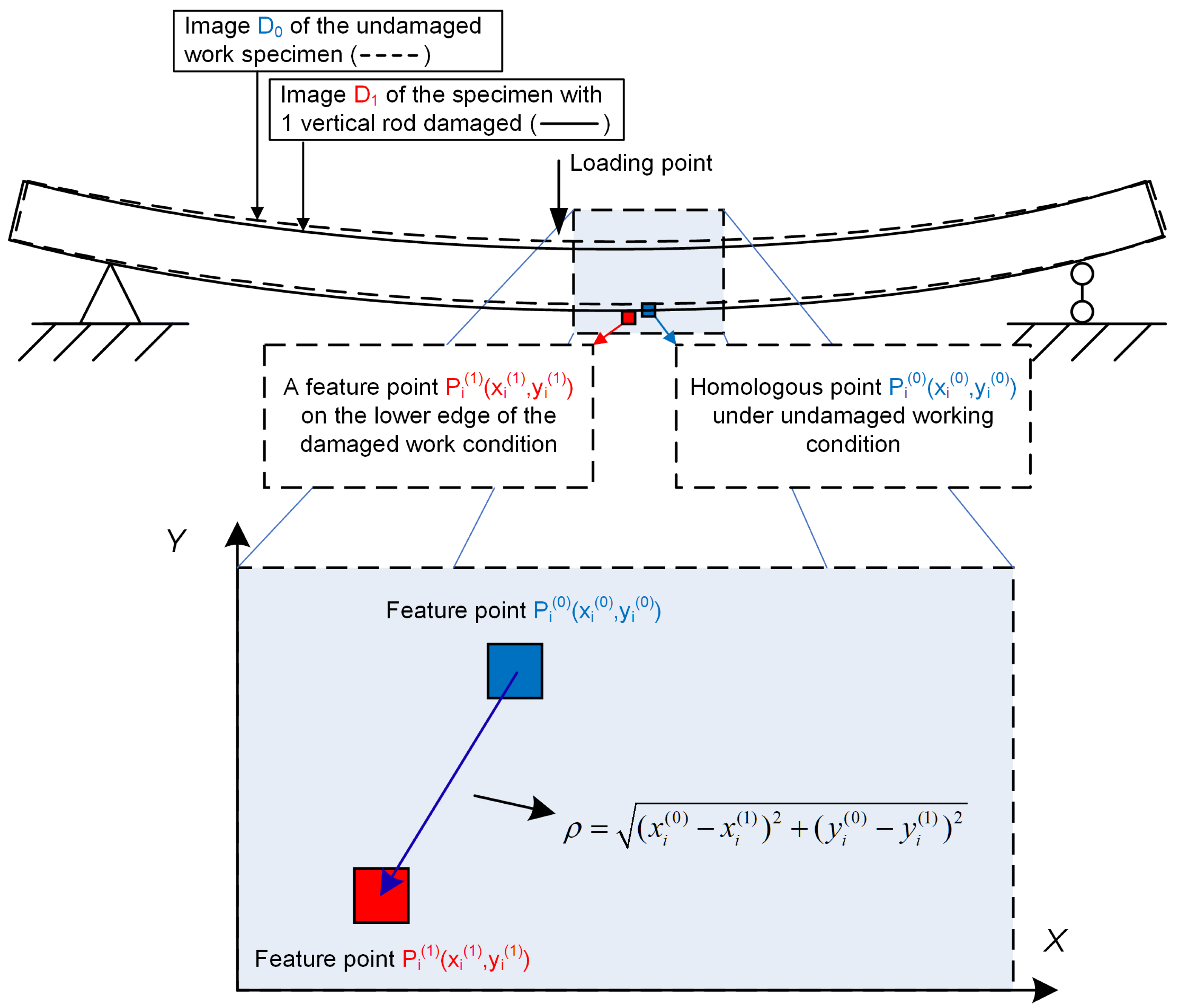
2.1. Damage Recognition Principle
2.2. Image Matrix Similarity Damages Identification Method
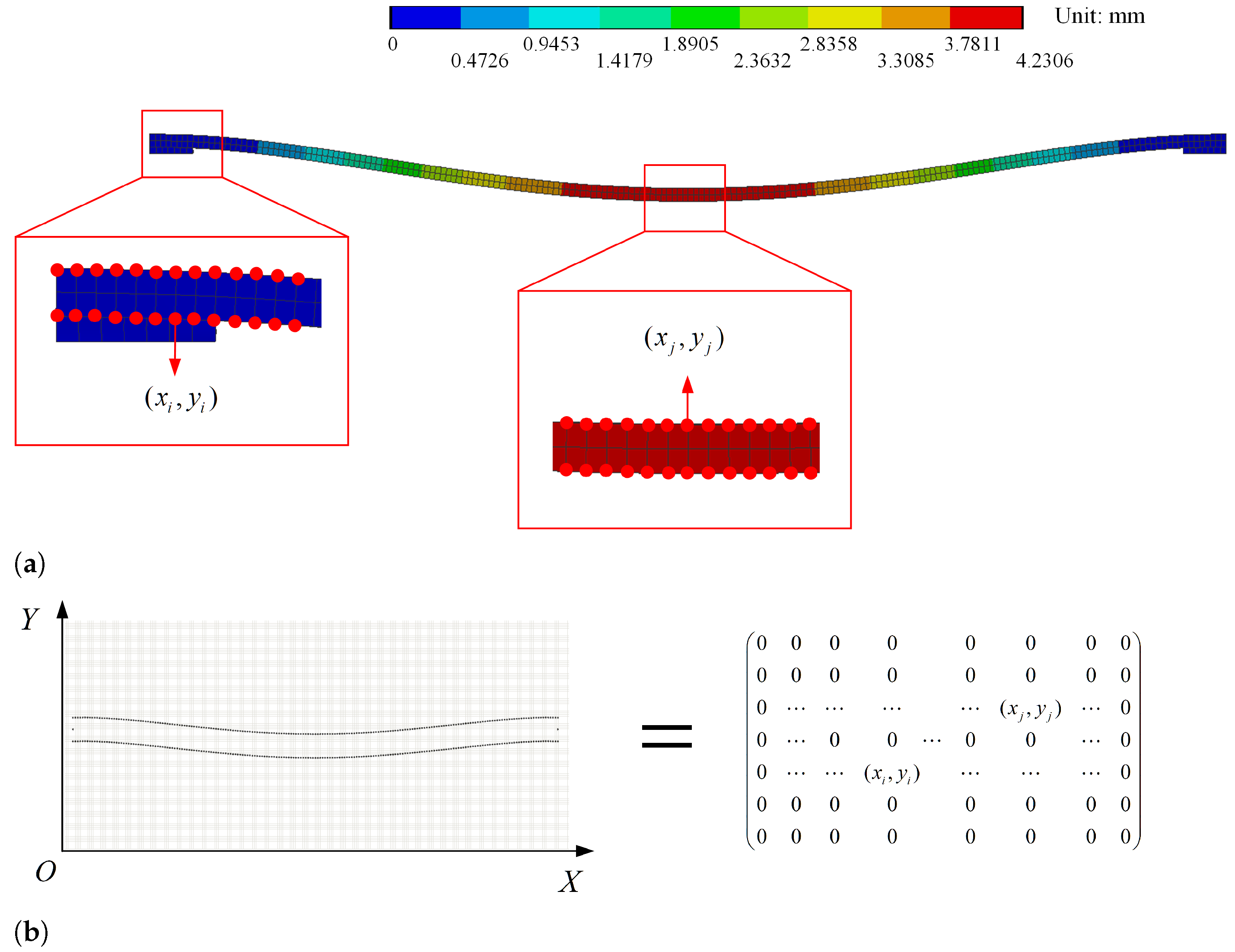
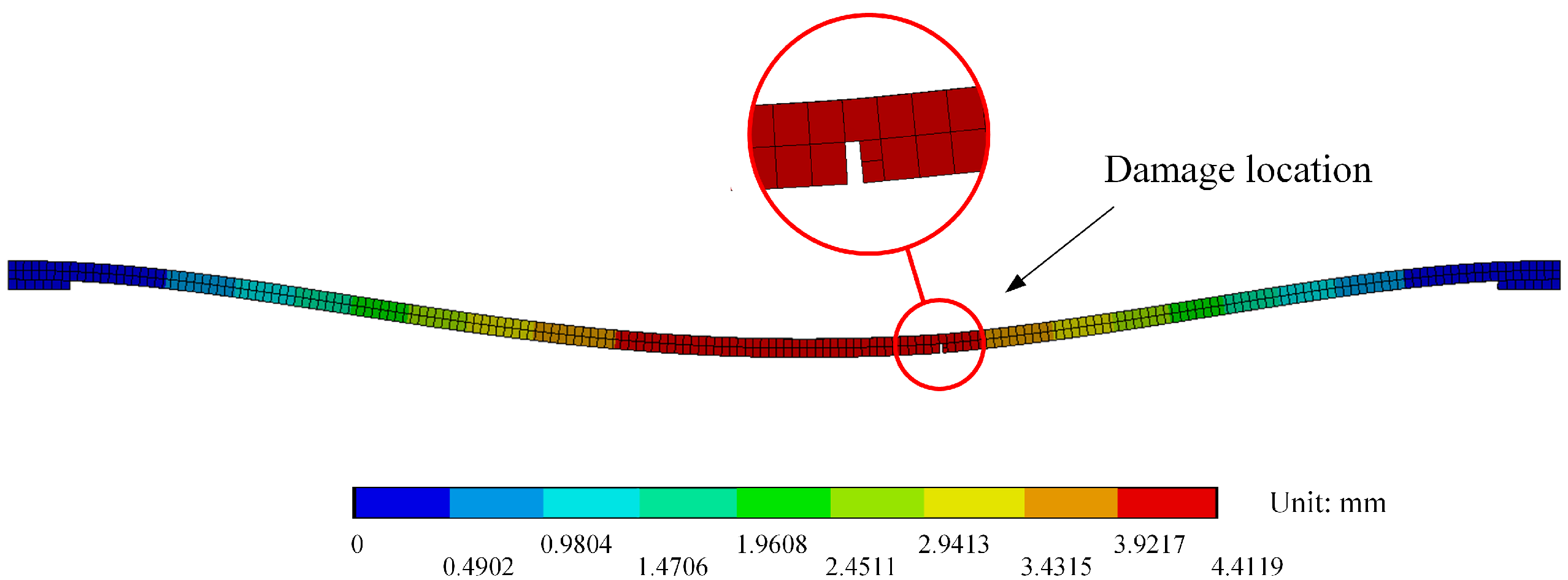
2.3. Numerical Validation of Image Matrix Similarity Damage Localization Method
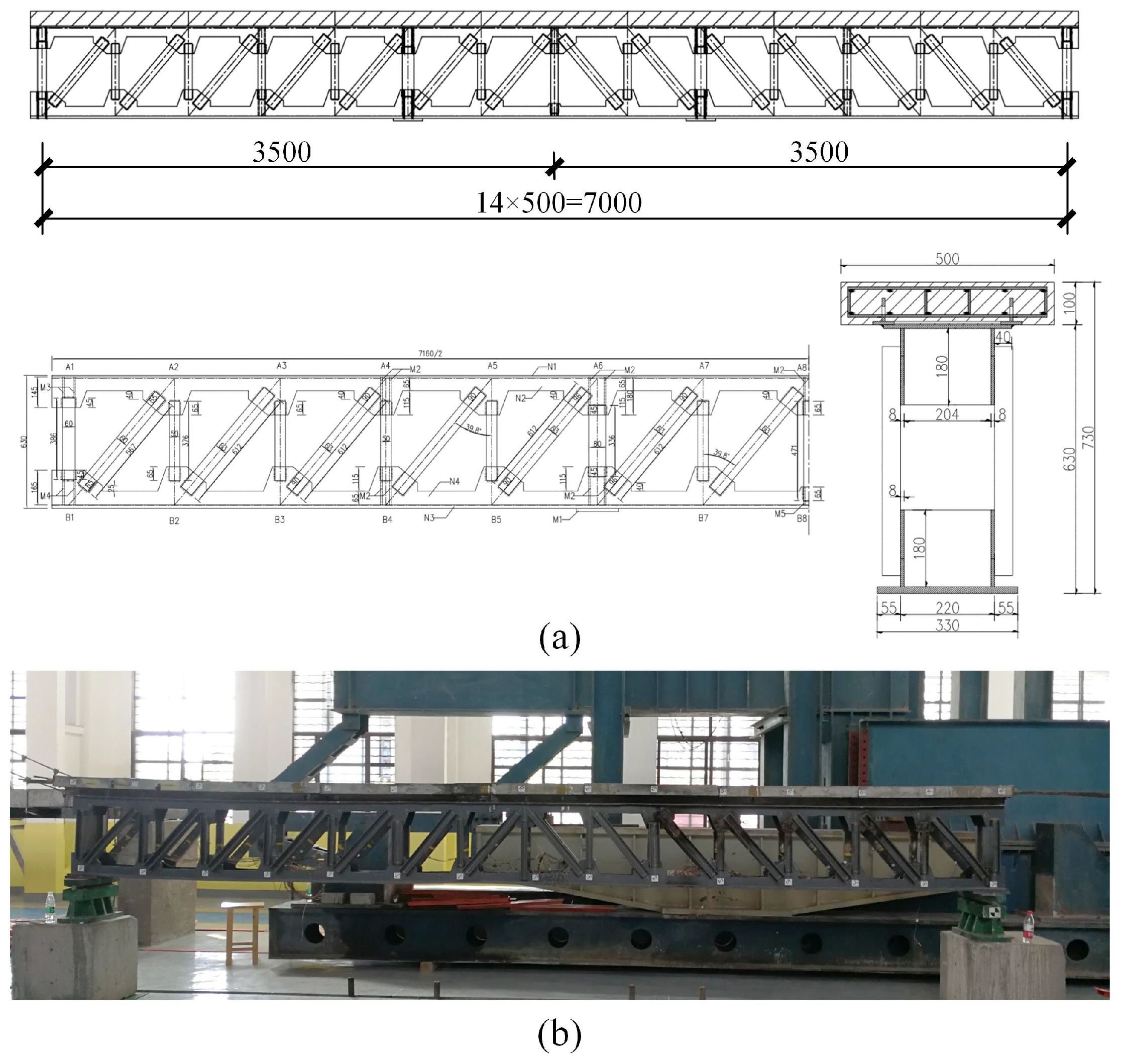
3. Static Test of a Steel Truss–Concrete Composite Beam
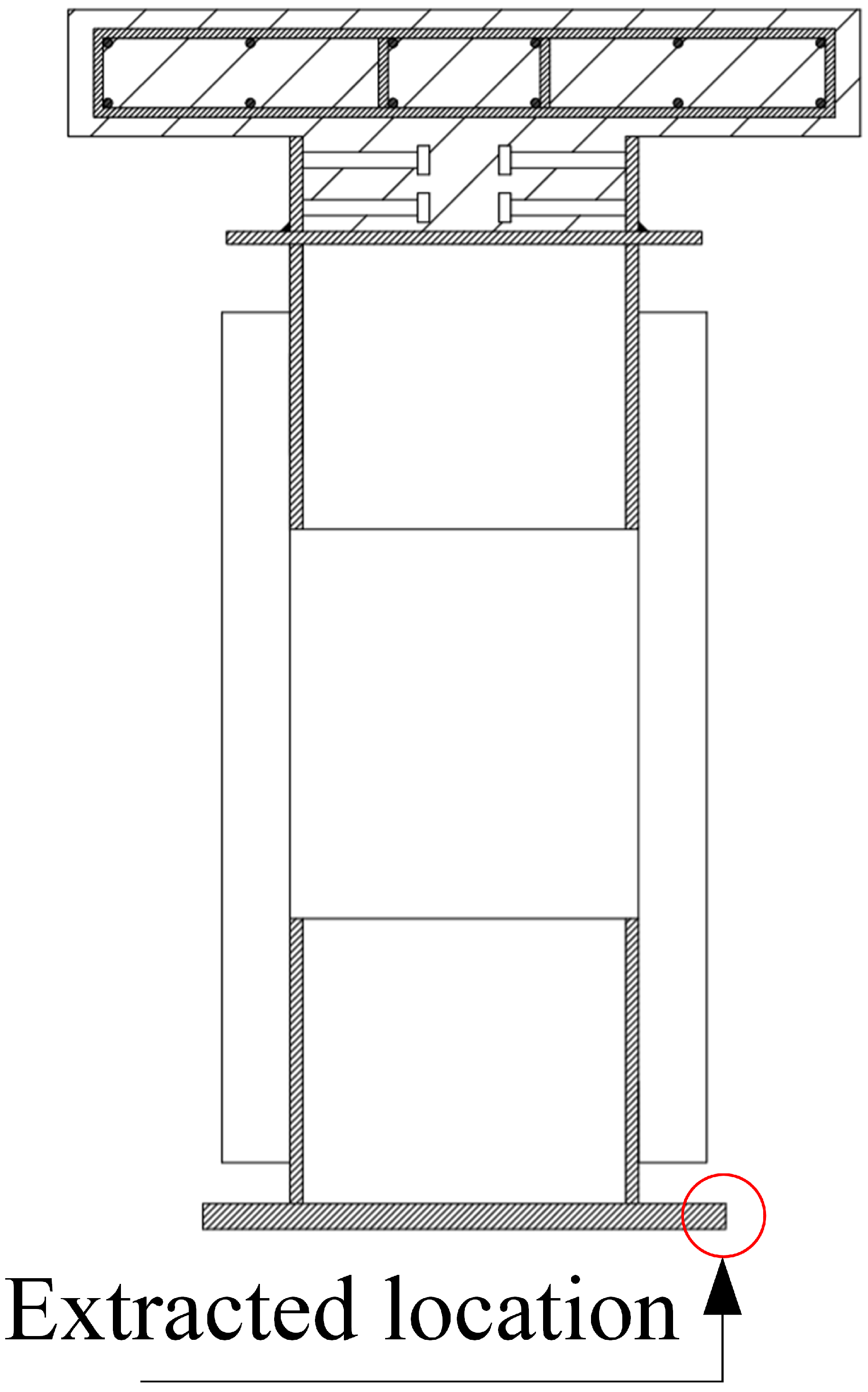
3.1. Specimen Preparation
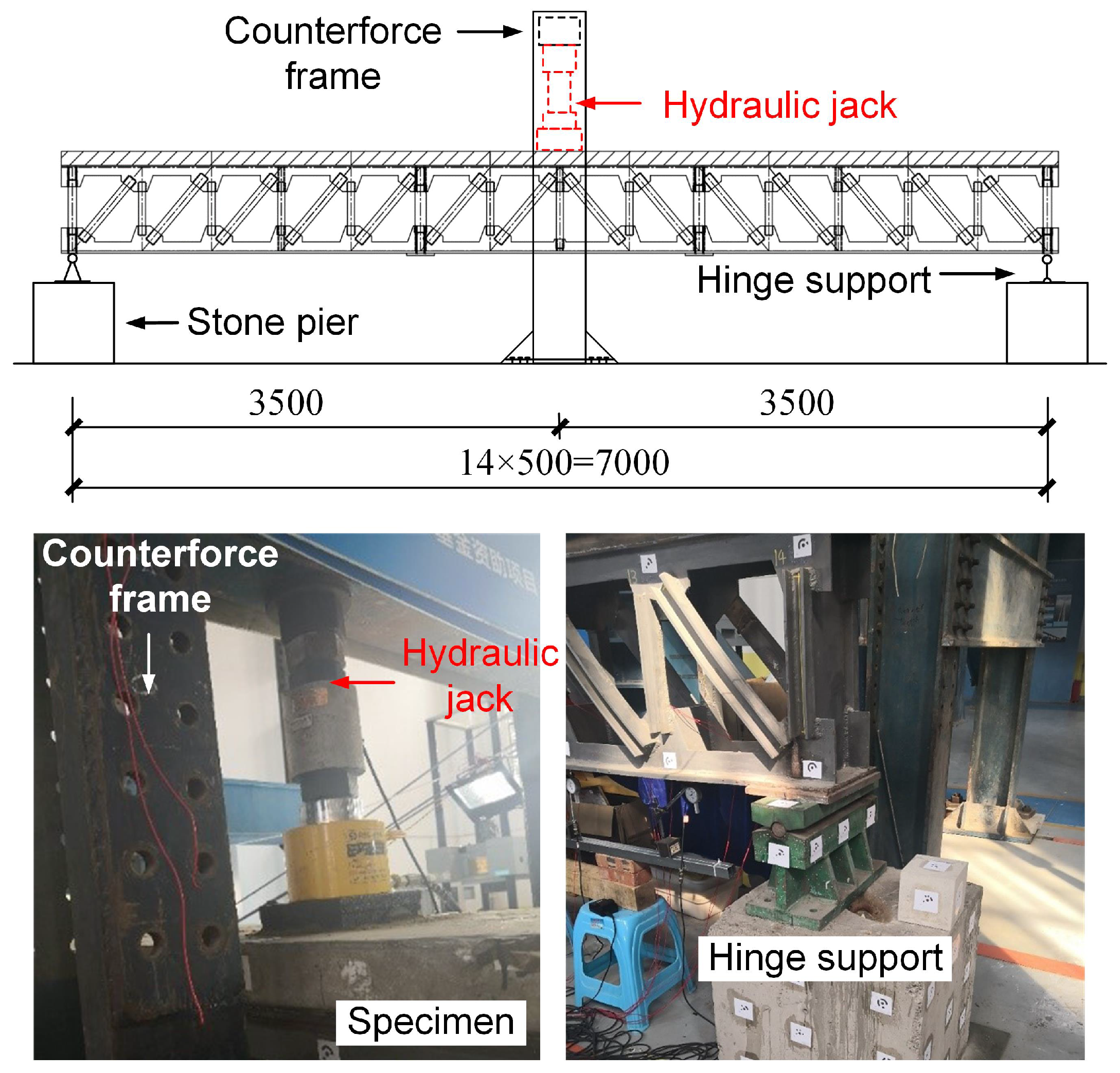
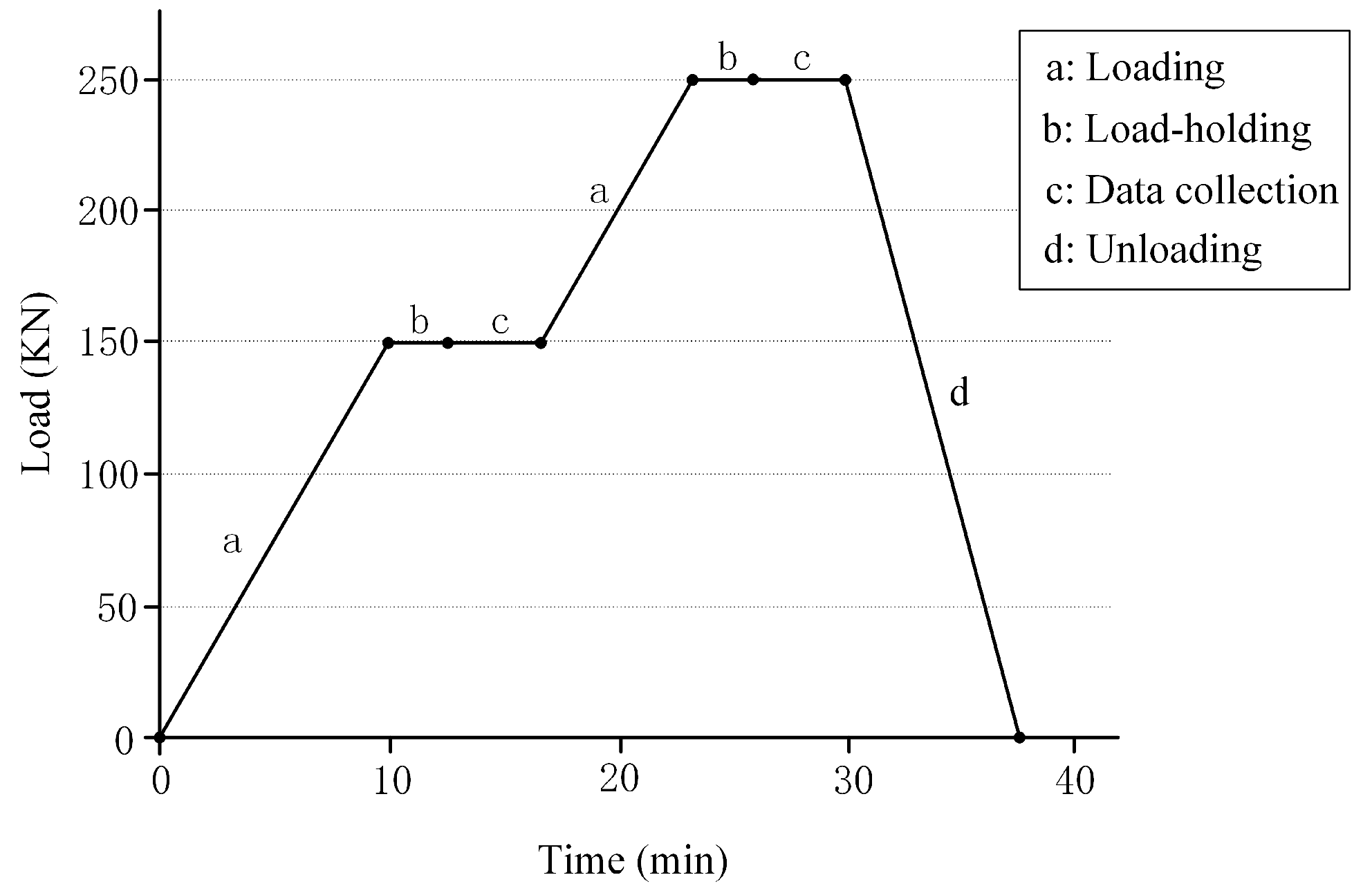
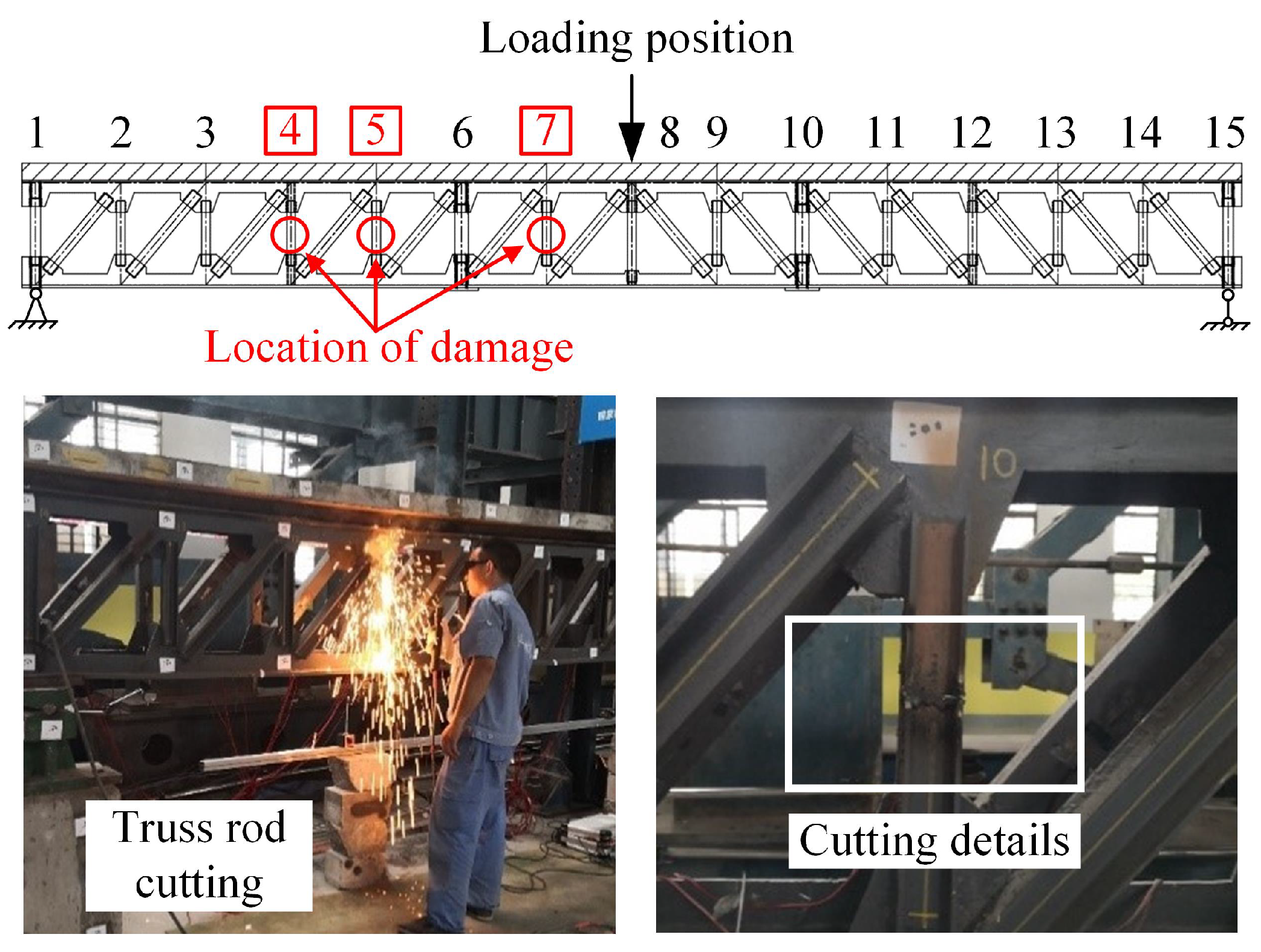
3.2. Test Loading Protype and Damage
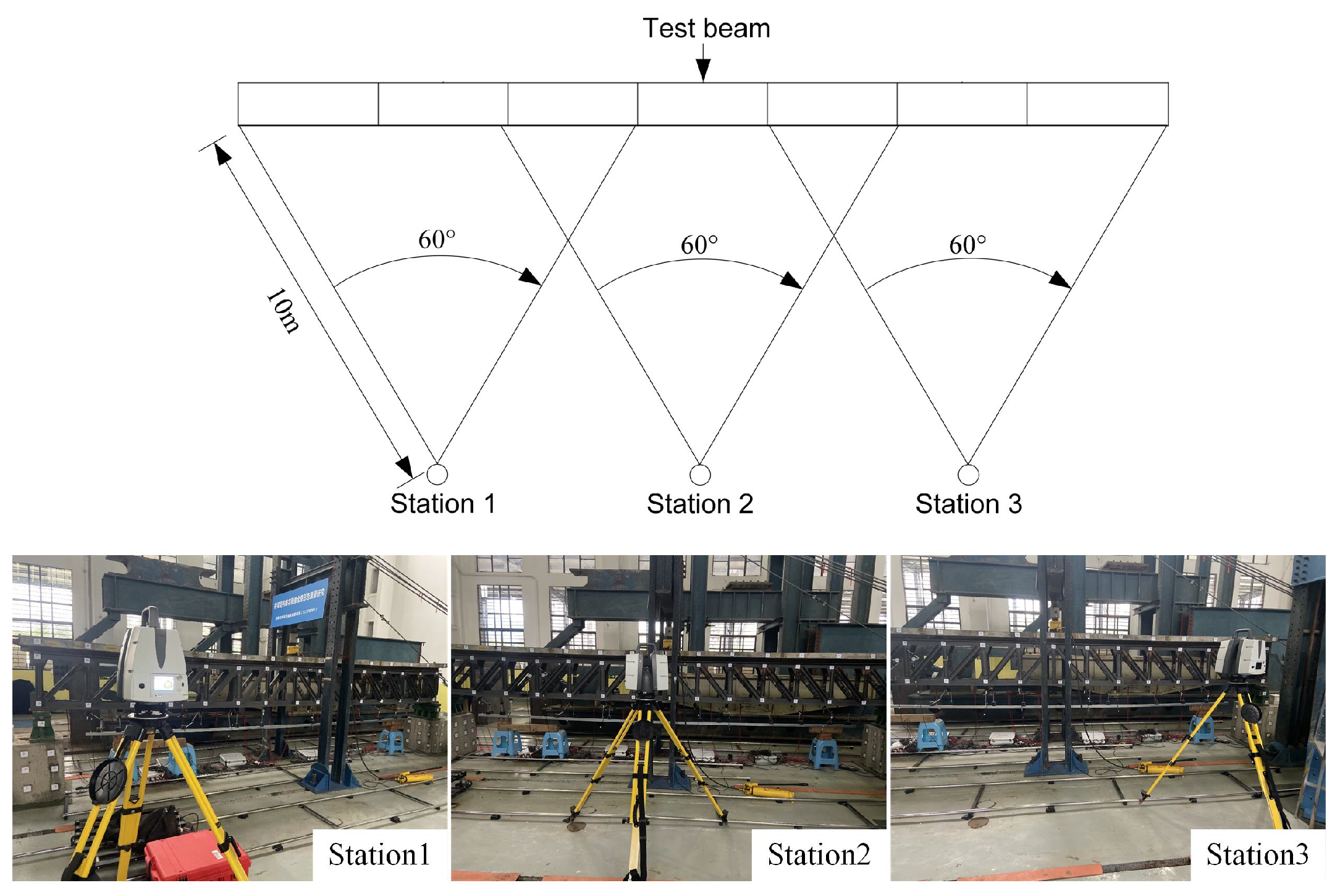
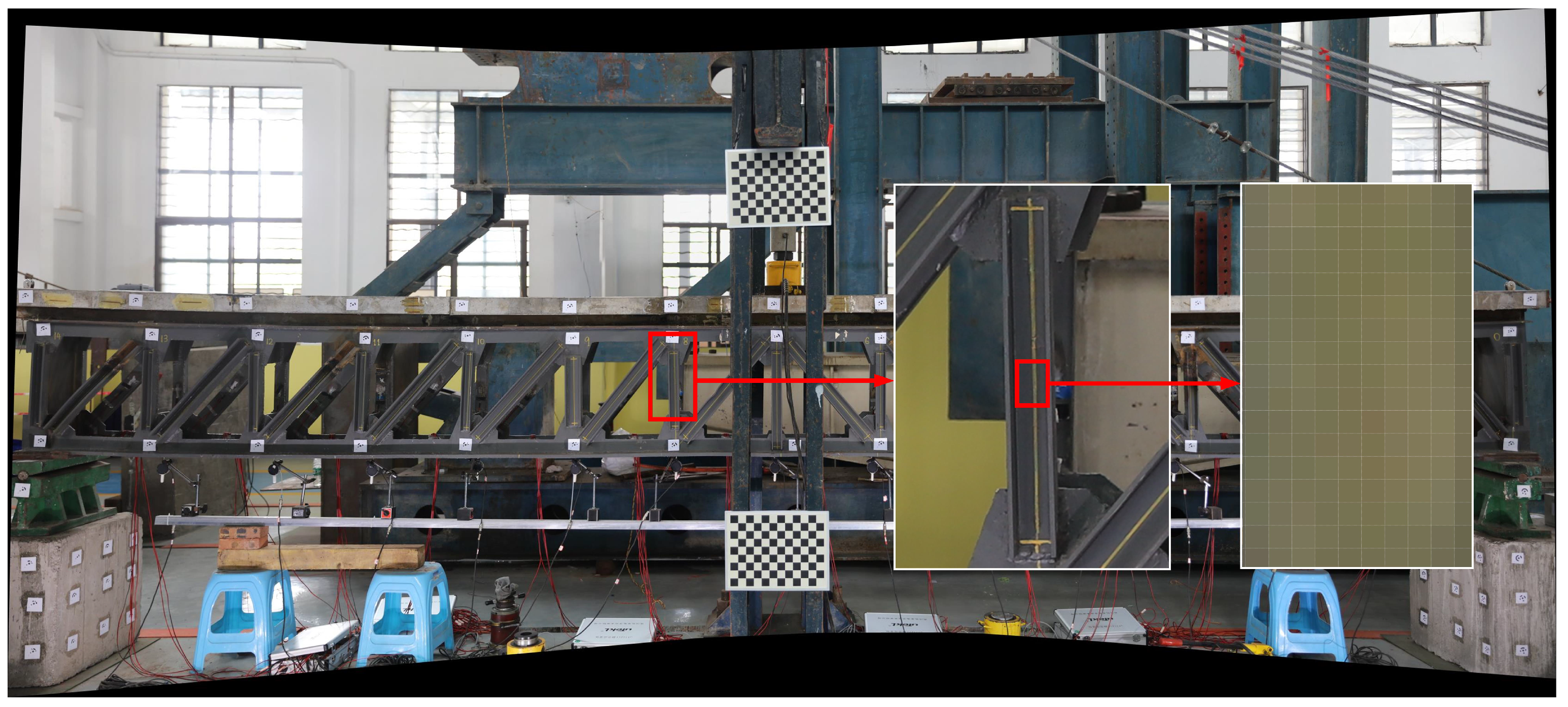
3.3. Image Data Acquisition
3.4. Accuracy-Verified Data Acquisition
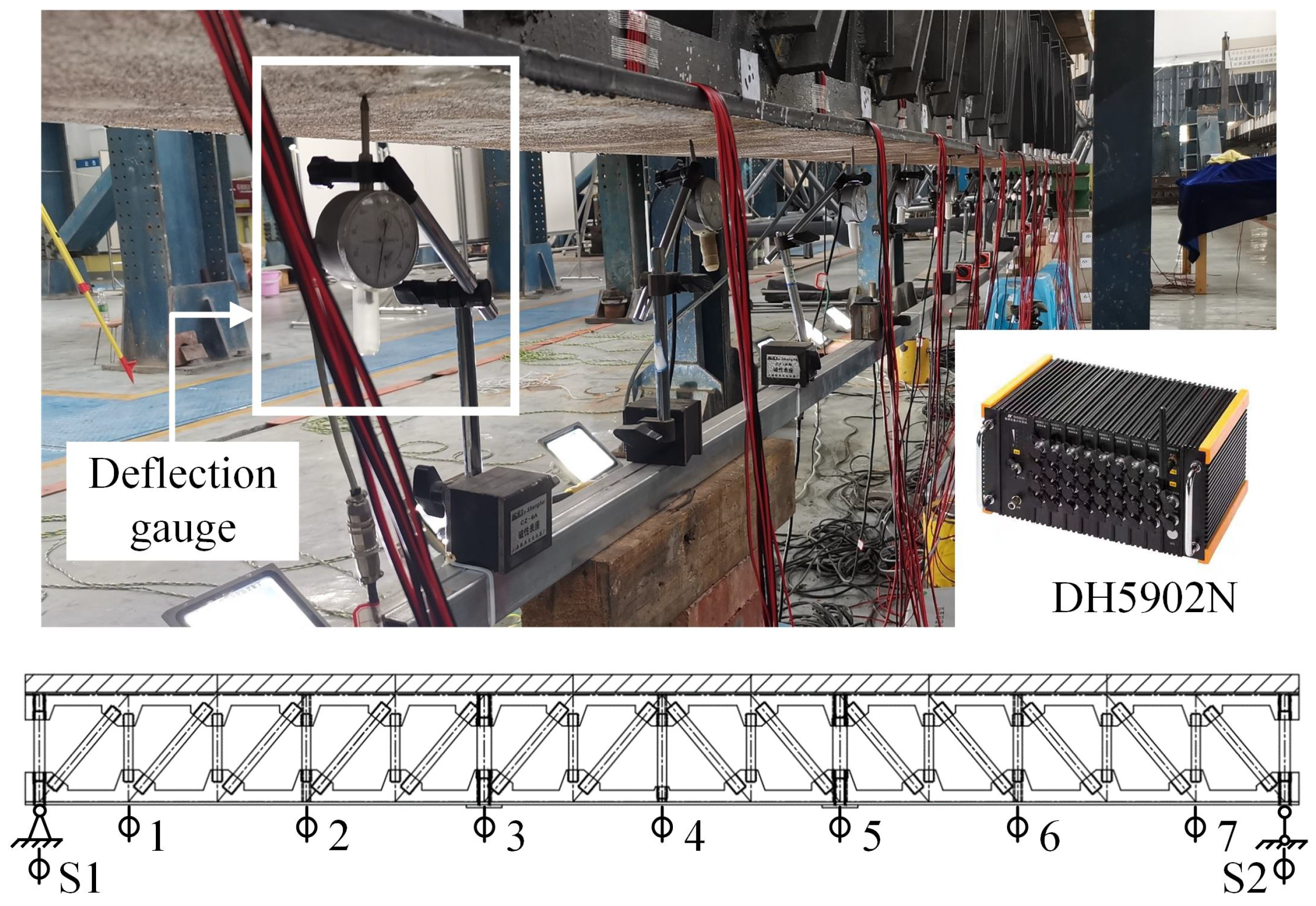
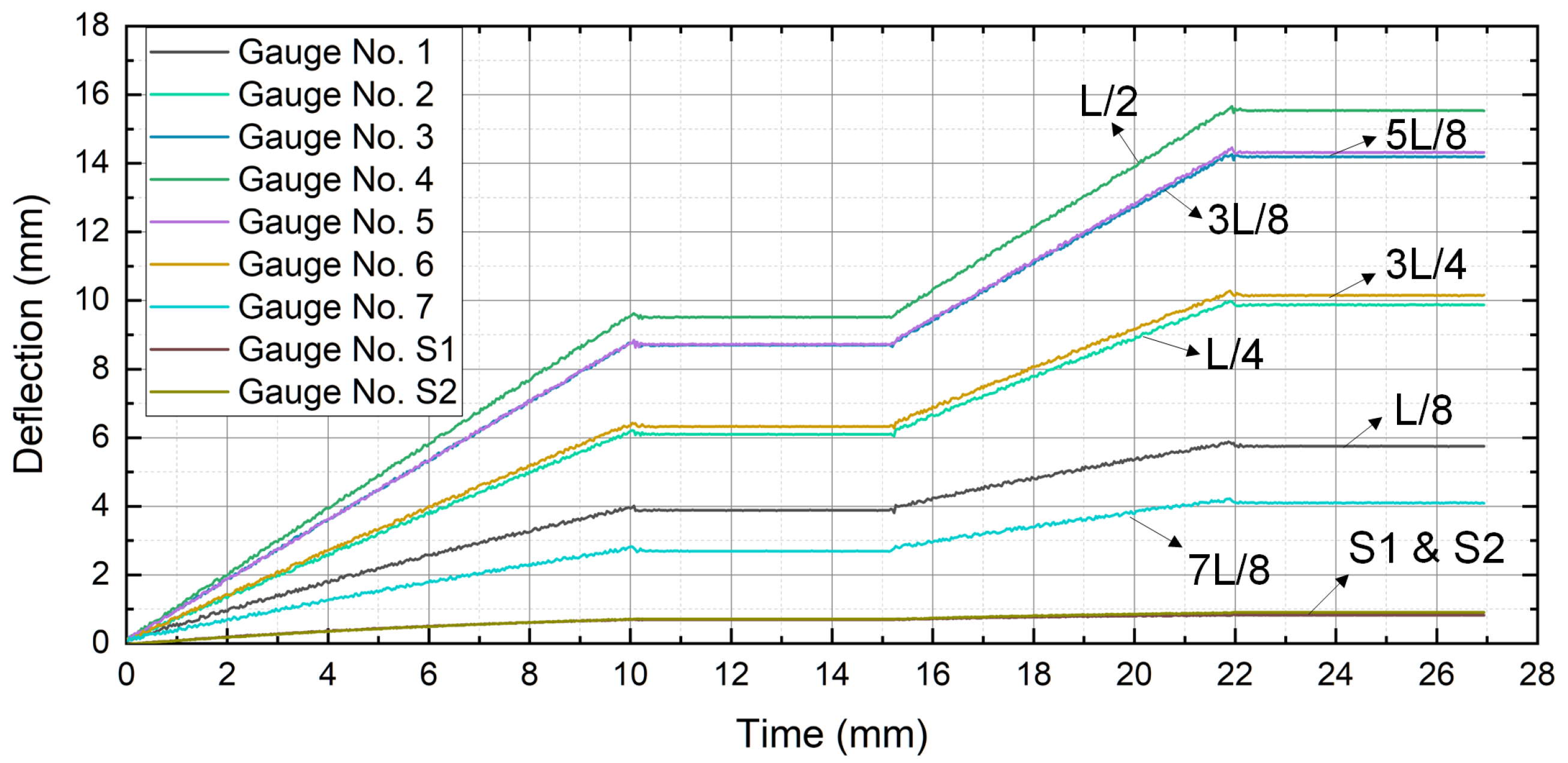
3.4.1. Deflection Gauge Measurement
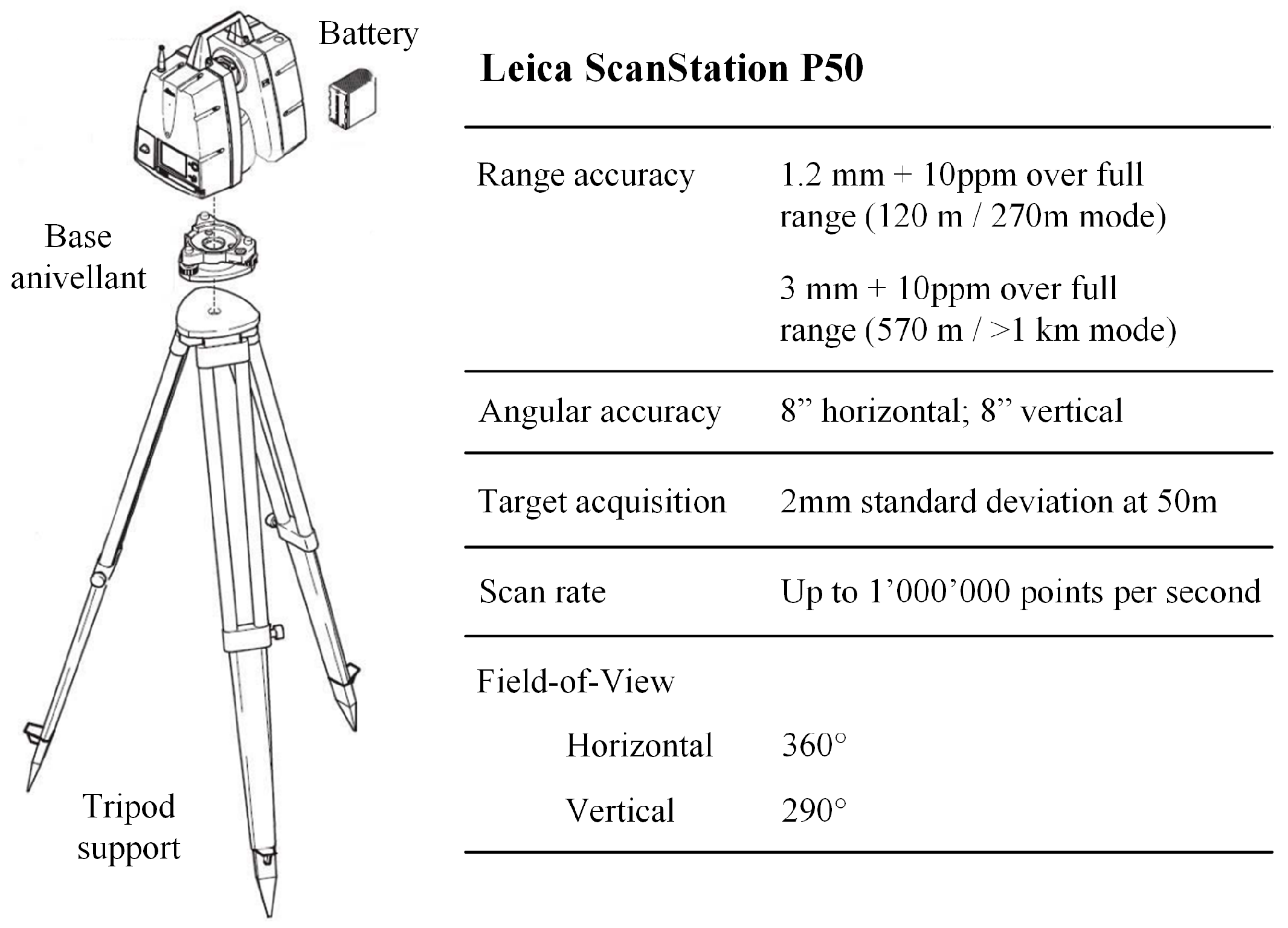
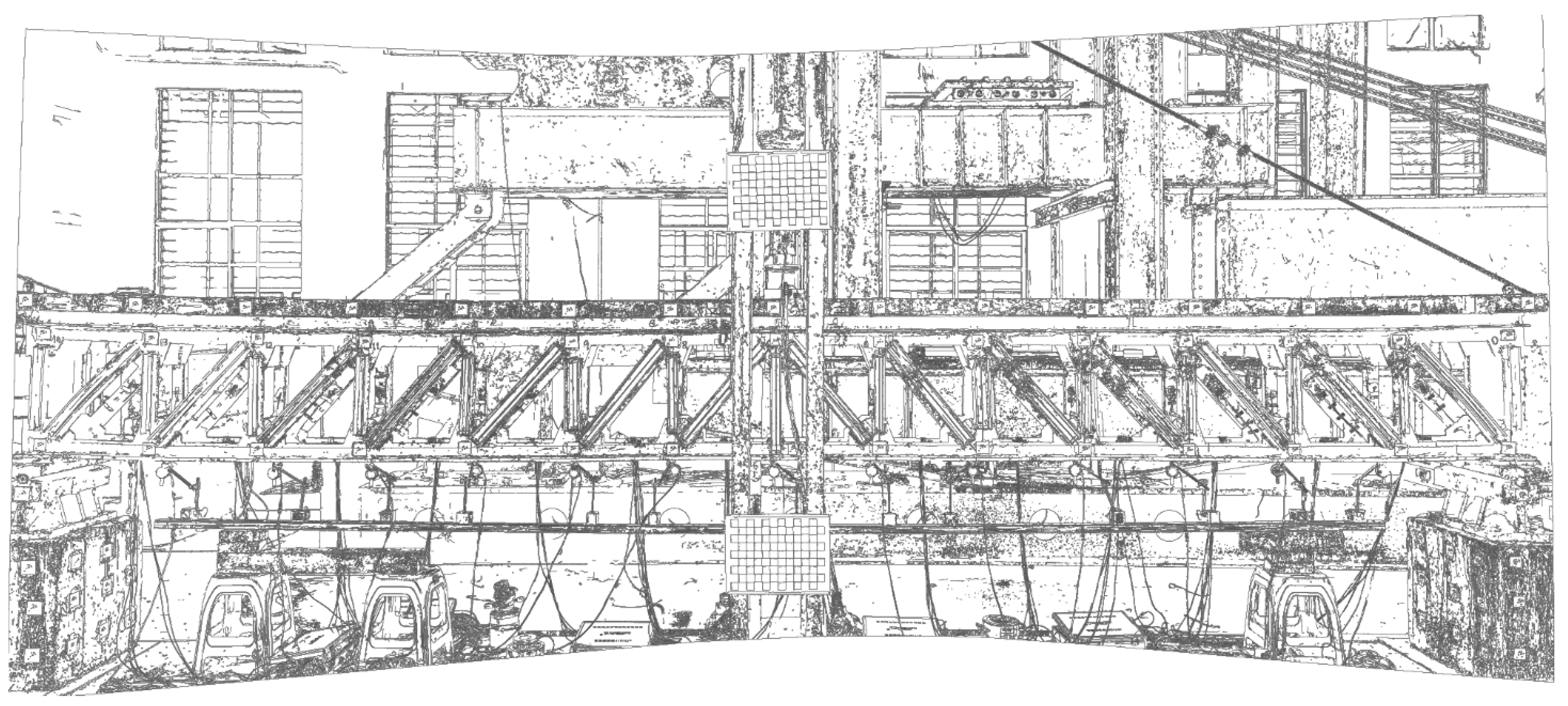
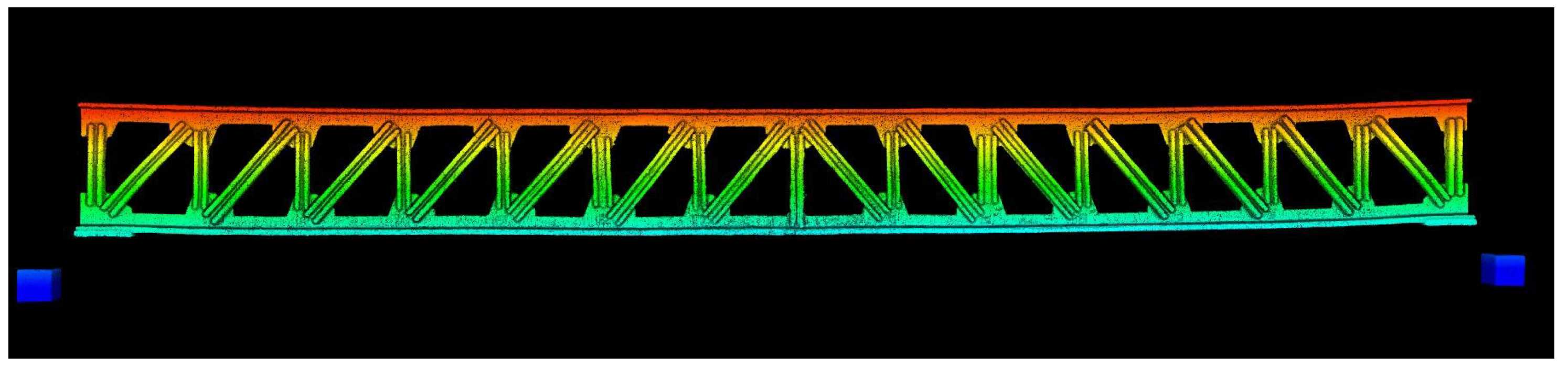
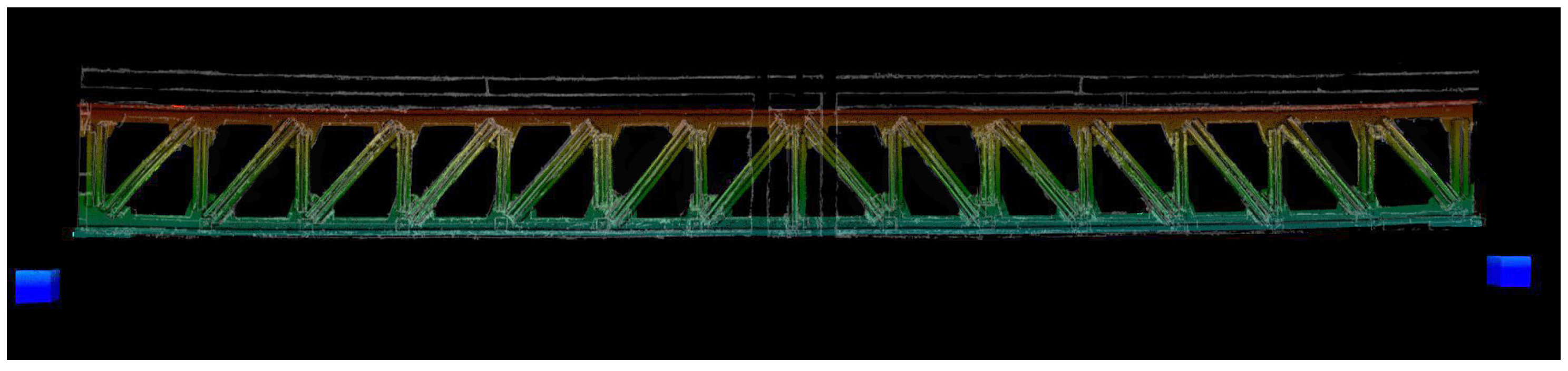
3.4.2. Three-Dimensional Laser Point Cloud Data Acquisition
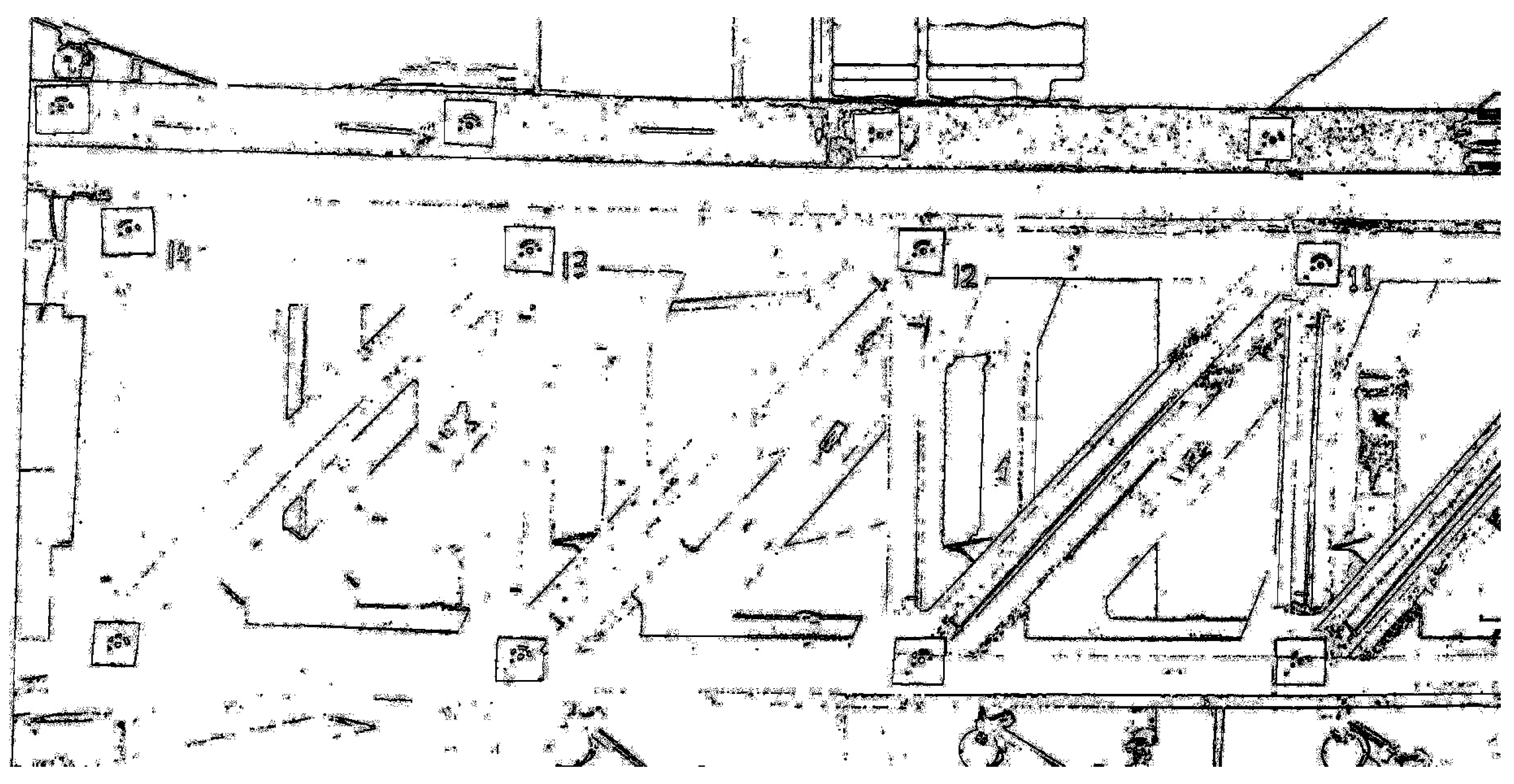
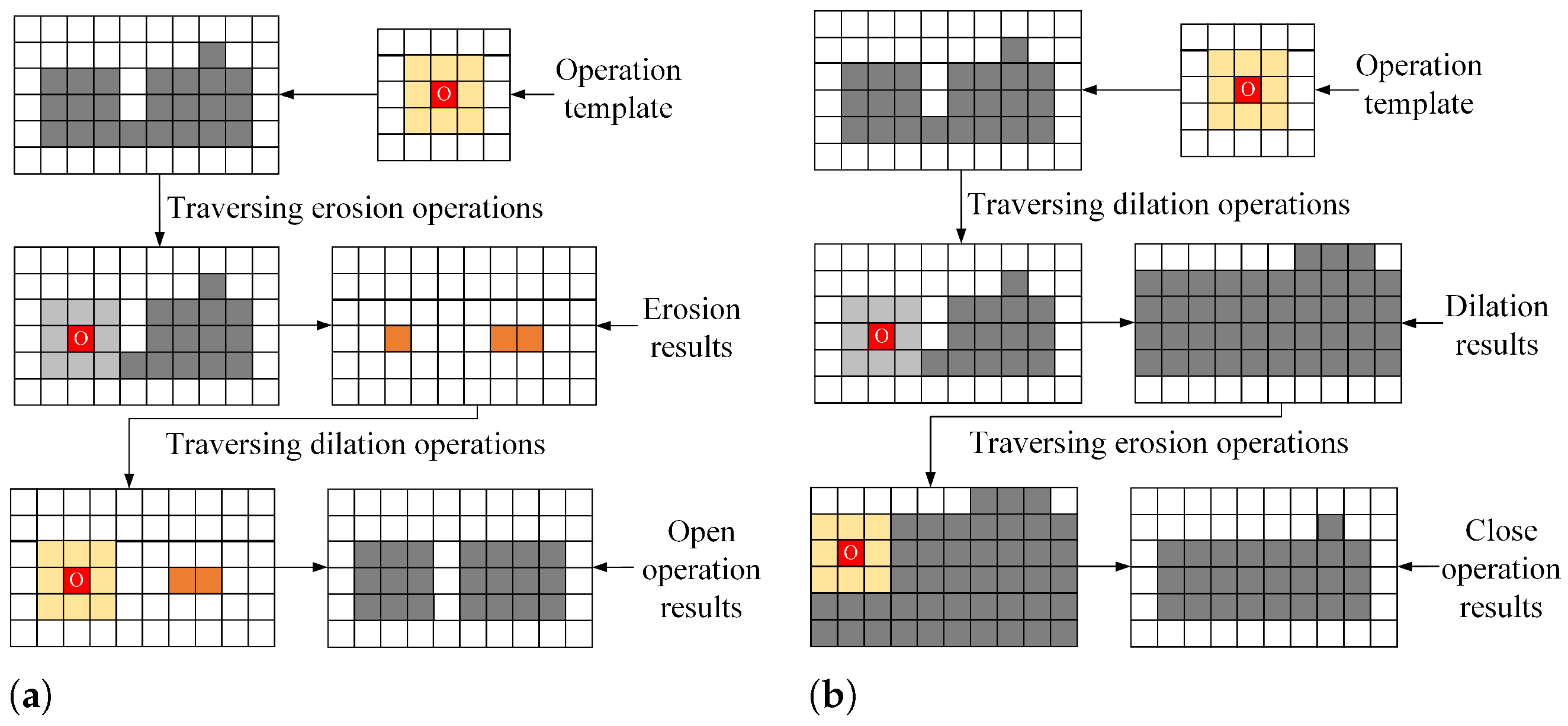
4. Bridge Structure Morphology Extraction
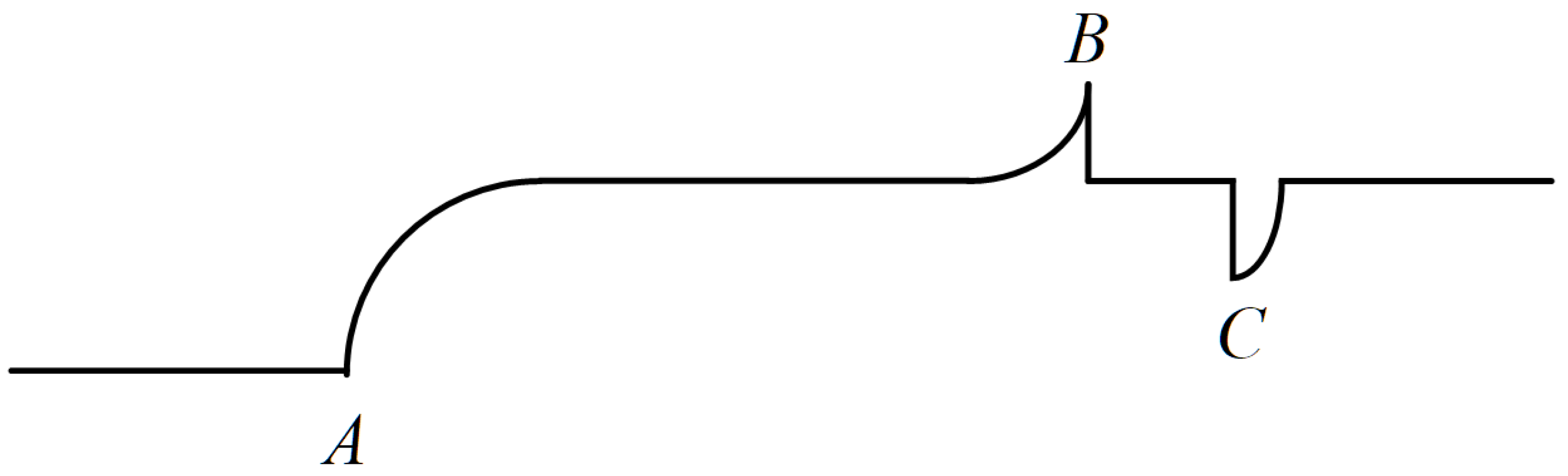
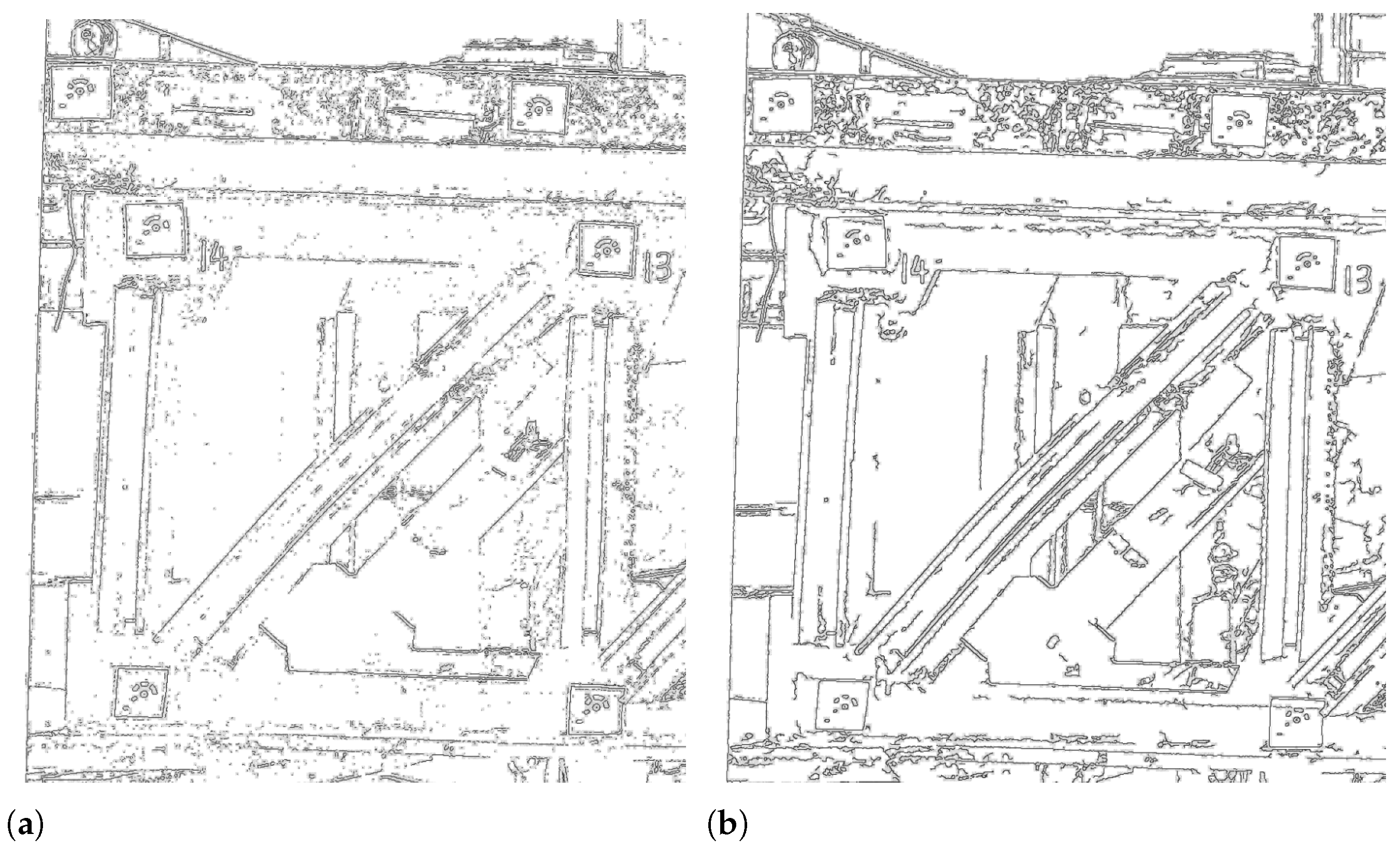
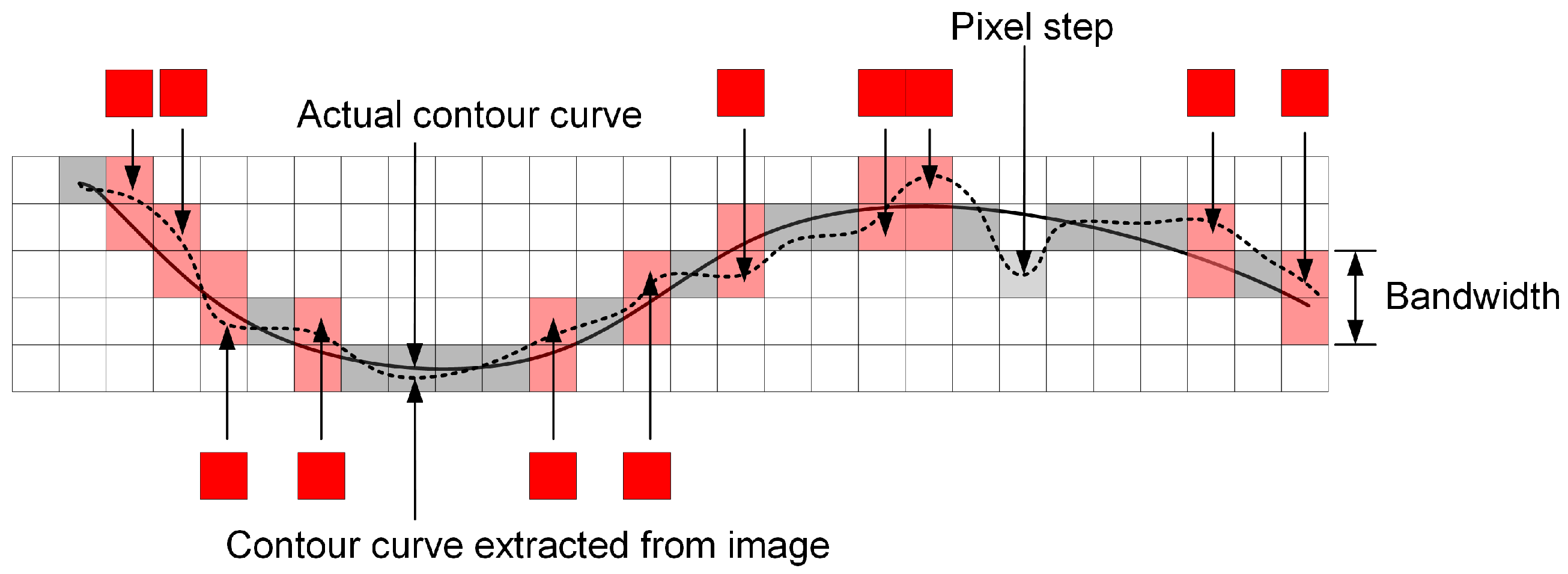
4.1. Regression of Discontinuous Edges of Test Beam Images
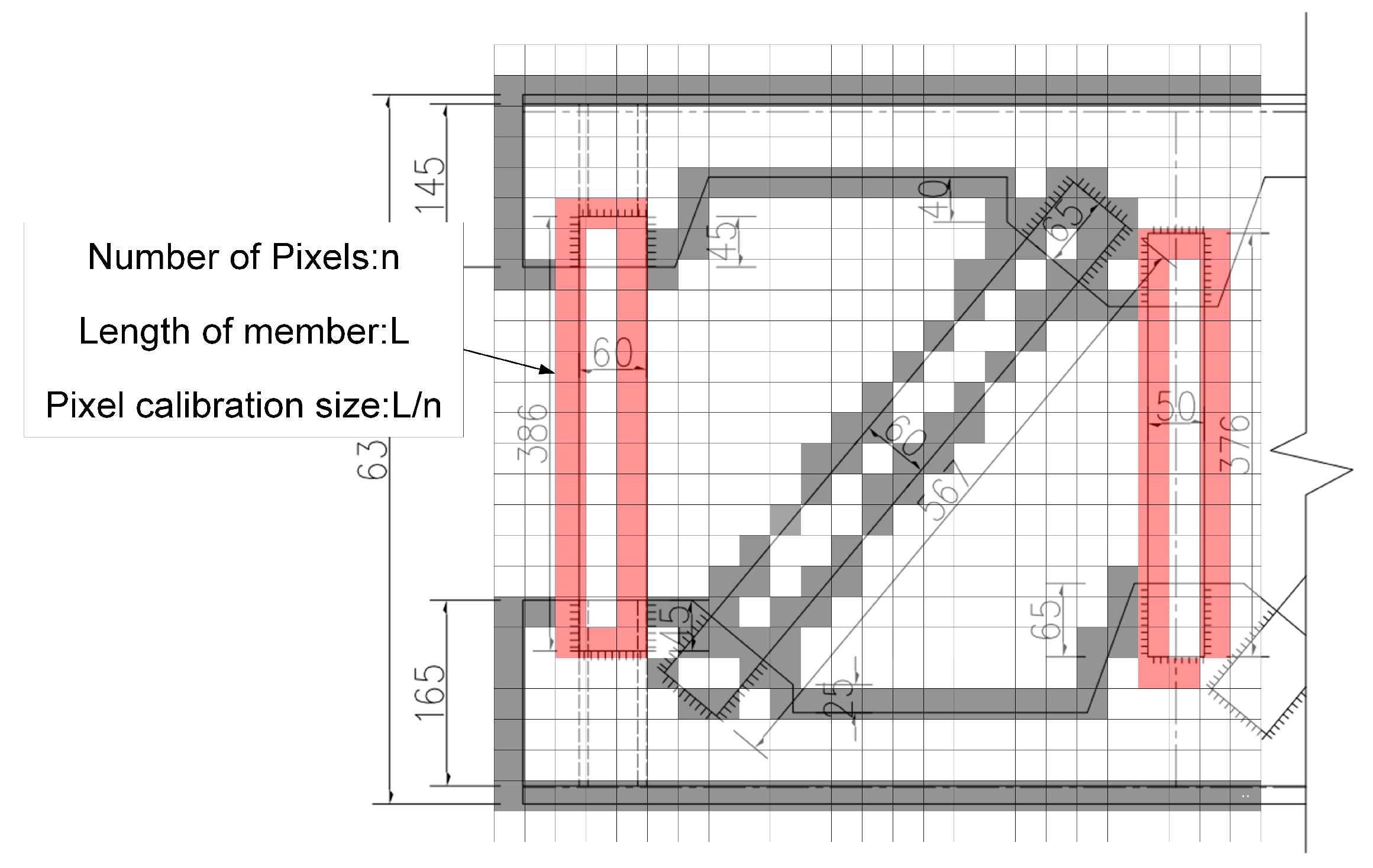
4.2. Calibration of Bridge Image Resolution
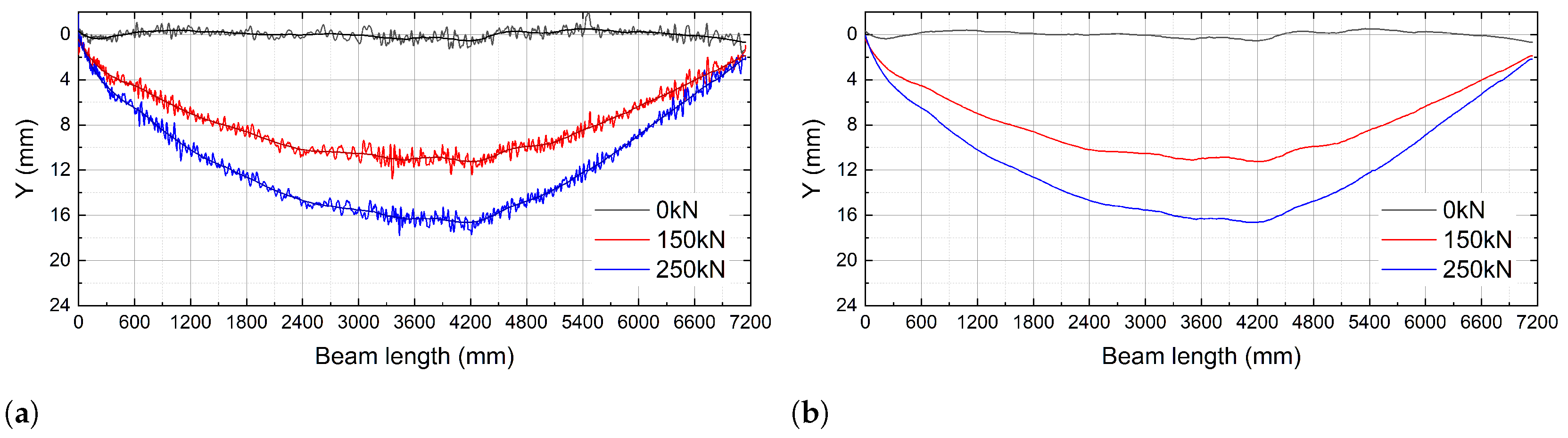
4.3. Structure Body Morphology Extraction Results Validation
5. Damage Identification based on Image Matrix Similarity
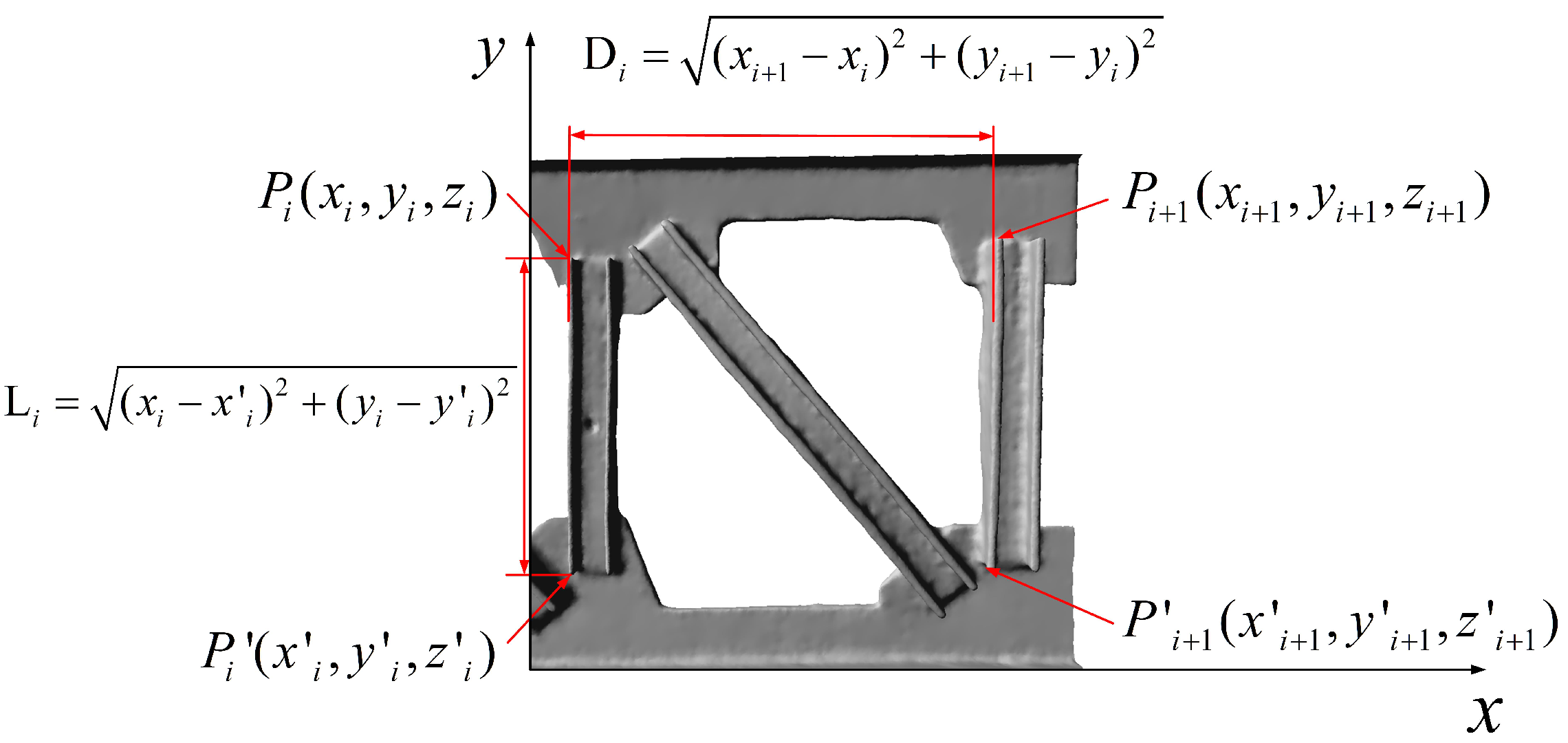
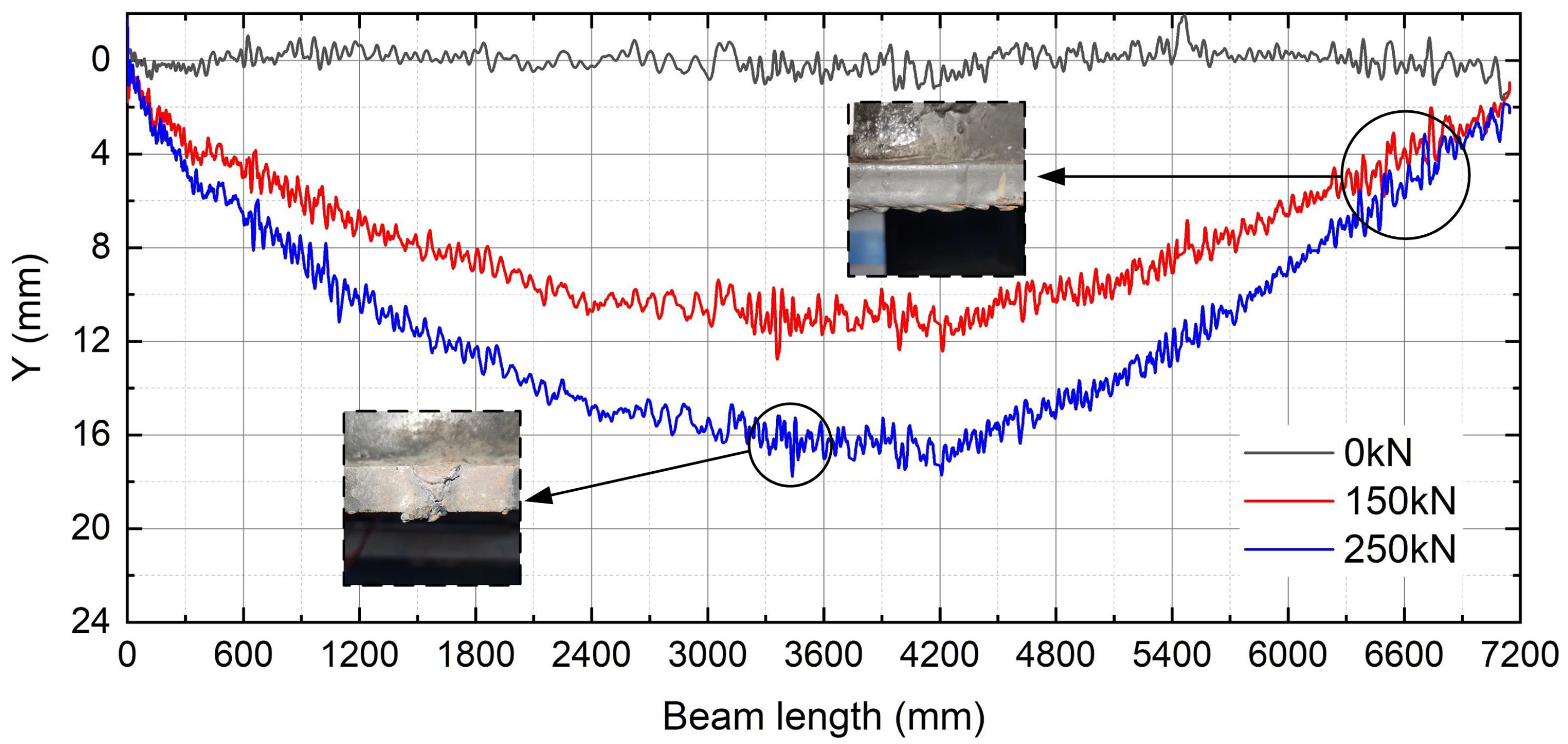
5.1. Bridge Structure Edge Deformation Analysis
5.2. Damage Identification
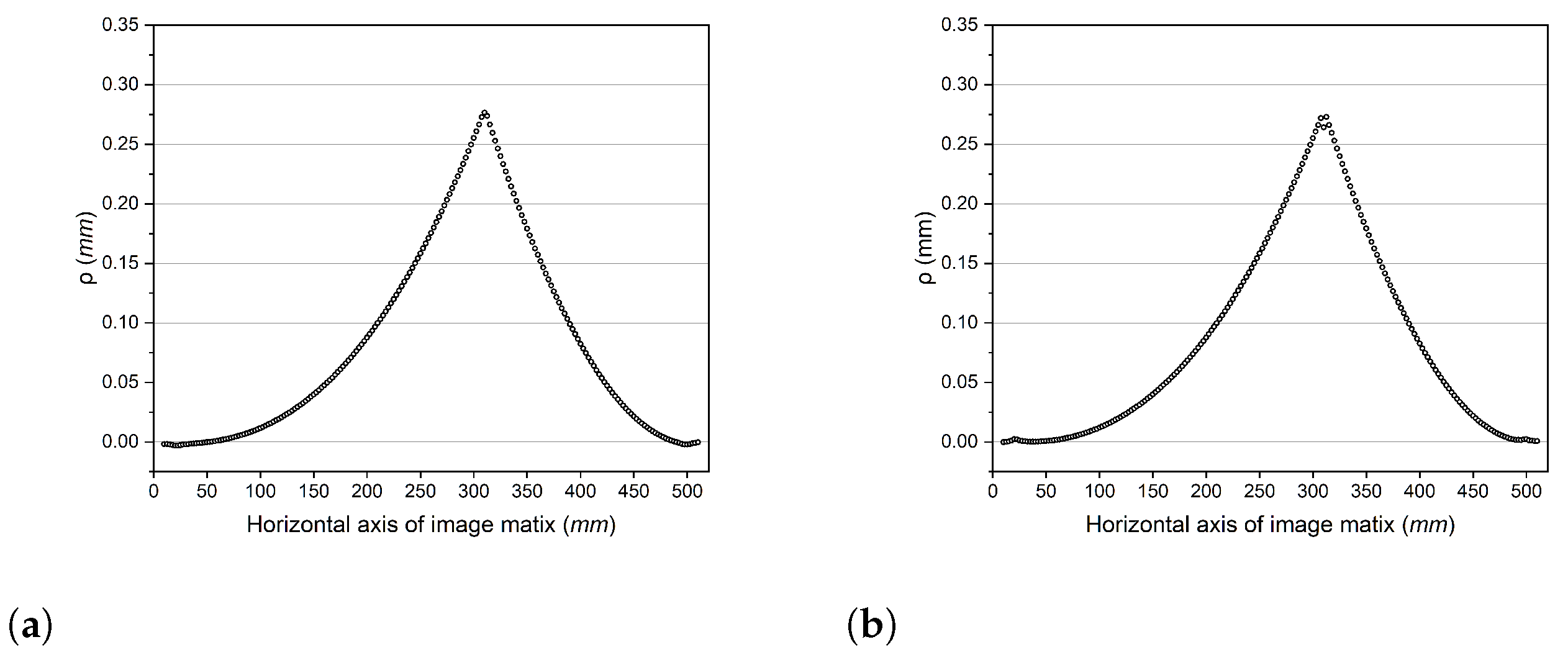
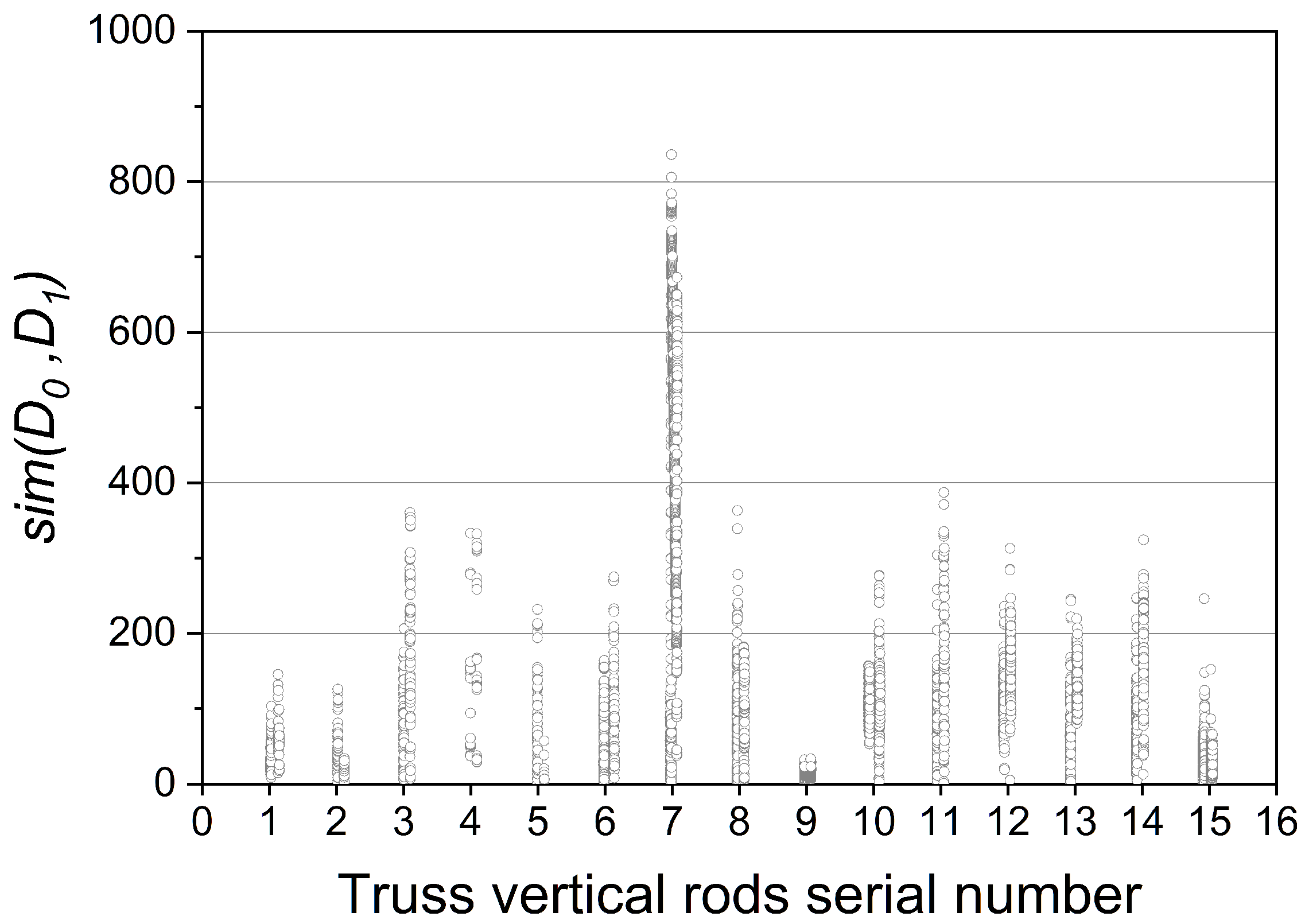
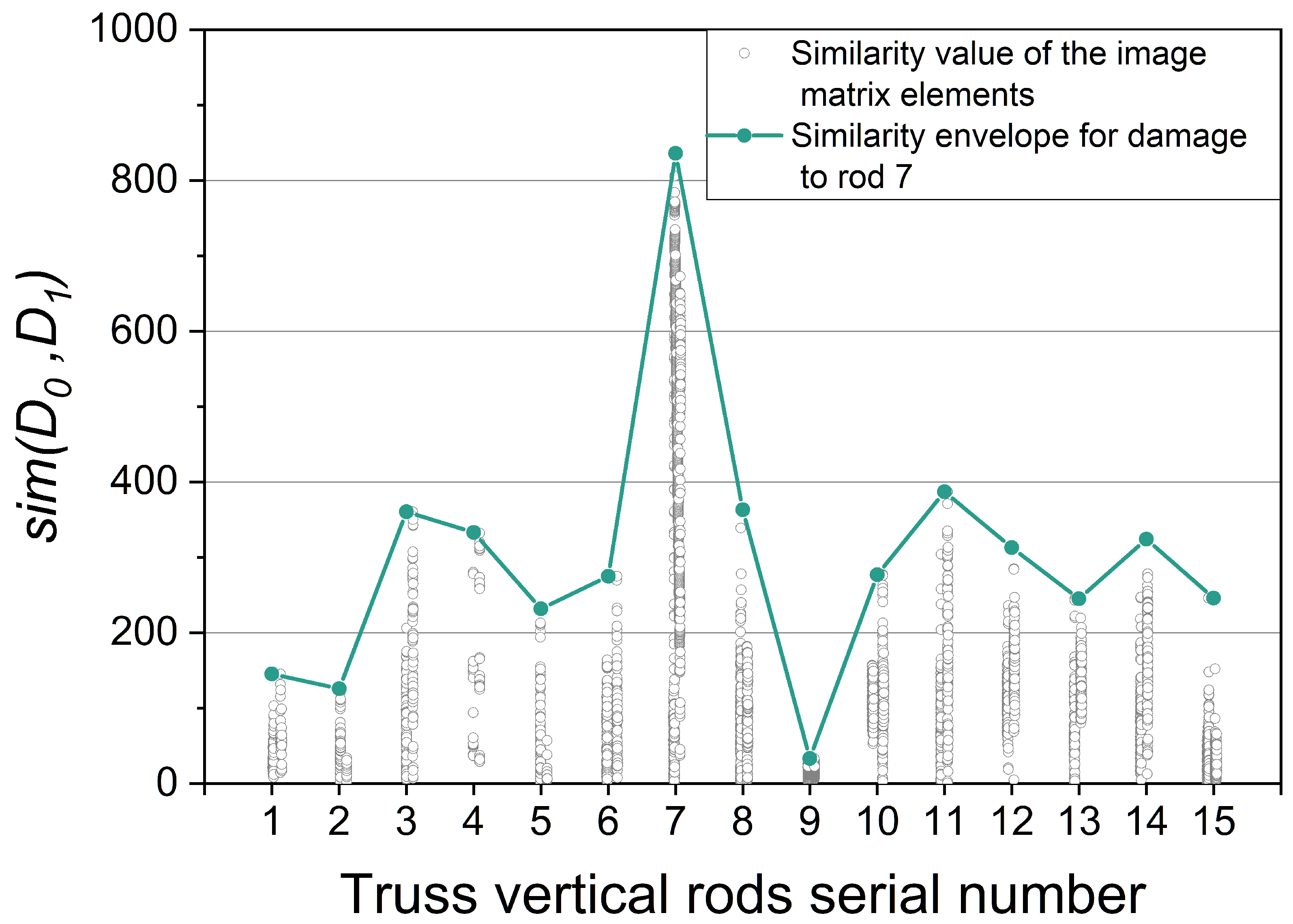
5.2.1. Single Damage Test Beam Image Matrix Similarity Analysis
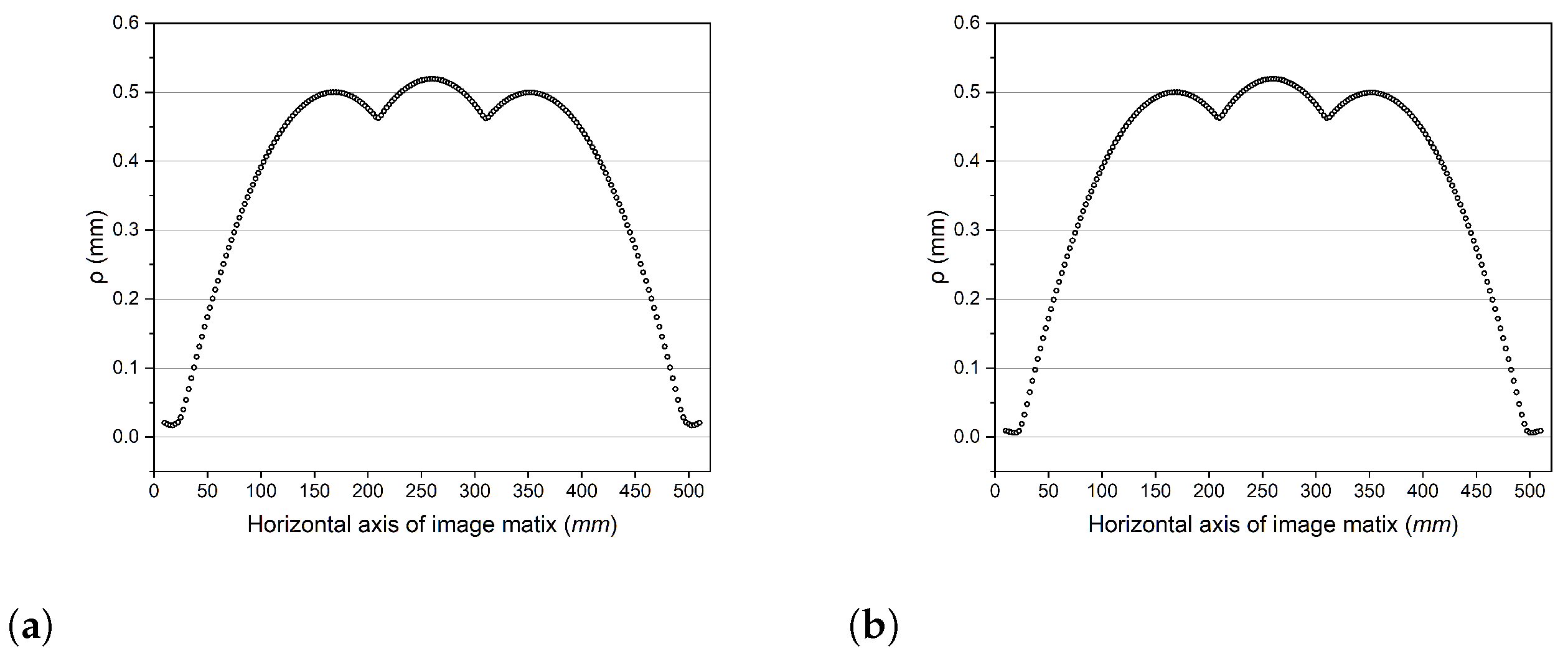
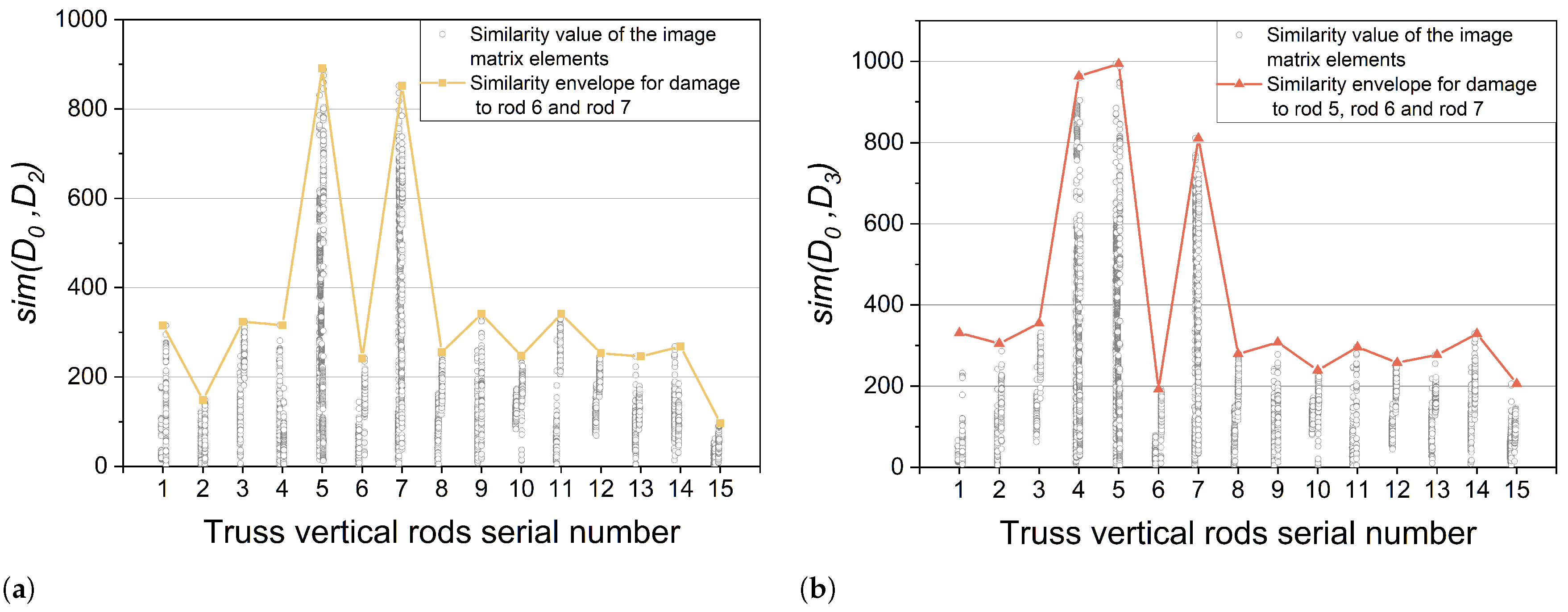
5.2.2. Multi-Damage Test Beam Image Matrix Similarity Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schlune, H.; Plos, M.; Gylltoft, K. Improved bridge evaluation through finite element model updating using static and dynamic measurements. Eng. Struct. 2009, 31, 1477–1485. [Google Scholar] [CrossRef]
- Marinone, T.; Dardeno, T.; Avitabile, P. Reduced model approximation approach using model updating methodologies. J. Eng. Mech. 2018, 144, 04018005. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, S.; Wu, Z.; Zhang, Q. Structural identification and damage detection through long-gauge strain measurements. Eng. Struct. 2015, 99, 173–183. [Google Scholar] [CrossRef]
- Cui, F.; Yuan, W.; Shi, J. Damage Detection of Structures Based on Static Response. J. Tongji Univ. 2000, 1, 8–11. [Google Scholar]
- Xu, Z.D.; Li, S.; Zeng, X. Distributed strain damage identification technique for long-span bridges under ambient excitation. Int. J. Struct. Stab. Dyn. 2018, 18, 1850133. [Google Scholar] [CrossRef]
- Banan, M.R.; Banan, M.R.; Hjelmstad, K. Parameter estimation of structures from static response. I. Computational aspects. J. Struct. Eng. 1994, 120, 3243–3258. [Google Scholar] [CrossRef]
- Kourehli, S.S.; Bagheri, A.; Amiri, G.G.; Ghafory-Ashtiany, M. Structural damage detection using incomplete modal data and incomplete static response. KSCE J. Civ. Eng. 2013, 17, 216–223. [Google Scholar] [CrossRef]
- Li, S.; Ma, L.; Tian, H. Structural damage detection method using incomplete measured modal data. J. Vib. Shock 2015, 34, 196–203. [Google Scholar]
- He, R.S.; Hwang, S.F. Damage detection by a hybrid real-parameter genetic algorithm under the assistance of grey relation analysis. Eng. Appl. Artif. Intell. 2007, 20, 980–992. [Google Scholar] [CrossRef]
- Savadkoohi, A.T.; Molinari, M.; Bursi, O.S.; Friswell, M.I. Finite element model updating of a semi-rigid moment resisting structure. Struct. Control Health Monit. 2011, 18, 149–168. [Google Scholar] [CrossRef]
- Hua, J. Research on Bridge’S Damage Detection and Evaluation Based on Static Test Data; Southwest Jiaotong University: Chengdu, China, 2005. [Google Scholar]
- Liu, G.; Mao, Z. Structural damage diagnosis with uncertainties quantified using interval analysis. Struct. Control Health Monit. 2017, 24, e1989. [Google Scholar] [CrossRef]
- Yan, L. The Research of Suspension Bridge Damage Detection Based on the Grey Relation Theory and Genetic Algorithm; Lanzhou Jiaotong University: Lanzhou, China, 2015. [Google Scholar]
- WenLong, G.; Jun, C.; DaShan, L. Structural damage identification based on quantum particle swarm optimization algorithm. J. Dyn. Control 2015, 13, 388–393. [Google Scholar]
- Fang, Z.; Zhang, G.G.; Tang, S.H.; Chen, S.J. Finite element modeling and model updating of concrete cable-stayed bridge. China J. Highw. Transp. 2013, 26, 77–85. [Google Scholar]
- Wang, Q.; Wu, N. Detecting the delamination location of a beam with a wavelet transform: An experimental study. Smart Mater. Struct. 2010, 20, 012002. [Google Scholar] [CrossRef]
- Song, Y.Z.; Bowen, C.R.; Kim, H.A.; Nassehi, A.; Padget, J.; Gathercole, N.; Dent, A. Non-invasive damage detection in beams using marker extraction and wavelets. Mech. Syst. Signal Process. 2014, 49, 13–23. [Google Scholar] [CrossRef] [Green Version]
- Ma, H.; Zhang, W.; Wang, Z. Application of wavelet analysis in cantilever beam crack identification. Chin. J. Comput. Mech. 2008, 05, 148–154. [Google Scholar]
- XiaoWei, Y.; Tan, L.; ChuanZhi, D. Structural damage detection based on Kalman filter and neutral axis location. China J. Zhejiang Univ. (Eng. Sci.) 2017, 10, 137–143. [Google Scholar]
- Pan, H.; Azimi, M.; Yan, F.; Lin, Z. Time-frequency-based data-driven structural diagnosis and damage detection for cable-stayed bridges. J. Bridge Eng. 2018, 23, 04018033. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P. Vibration-based damage identification methods: A review and comparative study. Struct. Health Monit. 2011, 10, 83–111. [Google Scholar] [CrossRef]
- Brownjohn, J.M.; De Stefano, A.; Xu, Y.L.; Wenzel, H.; Aktan, A.E. Vibration-based monitoring of civil infrastructure: Challenges and successes. J. Civ. Struct. Health Monit. 2011, 1, 79–95. [Google Scholar] [CrossRef]
- Zheng, J.; Chen, D.; Hu, H. Boundary Adjusted Network Based on Cosine Similarity for Temporal Action Proposal Generation. Neural Process. Lett. 2021, 53, 2813–2828. [Google Scholar] [CrossRef]
- Chu, X.; Zhou, Z.; Deng, G.; Duan, X.; Jiang, X. An overall deformation monitoring method of structure based on tracking deformation contour. Appl. Sci. 2019, 9, 4532. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Mao, Y.; Yan, T.; Liu, Y. Perspective Transformation Algorithm for Light Field Image. Laser Optoelectron. Prog. 2019, 56, 151003. [Google Scholar] [CrossRef]
- Yuan, R.; Liu, M.; Hui, M.; Zhao, Y.; Dong, L. Depth map stitching based on binocular vision. Laser Optoelectron. Prog. 2018, 55, 282–287. [Google Scholar]
- Jiang, J.; Zou, Y.; Yang, J.; Zhou, J.; Zhang, Z.; Huang, Z. Study on Bending Performance of Epoxy Adhesive Prefabricated UHPC-Steel Composite Bridge Deck. Adv. Civ. Eng. 2021, 2021, 6658451. [Google Scholar] [CrossRef]
- Pinpin, L.; Wenge, Q.; Yunjian, C.; Feng, L. Application of 3D laser scanning in underground station cavity clusters. Adv. Civ. Eng. 2021, 2021, 8896363. [Google Scholar] [CrossRef]
- Zhang, H.; Xia, J. Research on convergence analysis method of metro tunnel section–Based on mobile 3D laser scanning technology. IOP Conf. Ser. Earth Environ. Sci. 2021, 669, 012008. [Google Scholar] [CrossRef]
- Wu, C.; Yuan, Y.; Tang, Y.; Tian, B. Application of Terrestrial Laser Scanning (TLS) in the Architecture, Engineering and Construction (AEC) Industry. Sensors 2022, 22, 265. [Google Scholar] [CrossRef]
- Ling, X. Research on Building Measurement Accuracy Verification Based on Terrestrial 3D Laser Scanner. IOP Conf. Ser. Earth Environ. Sci. 2021, 632, 052086. [Google Scholar] [CrossRef]
- Xi, C.X.; xiang Zhou, Z.; Xiang, X.; He, S.; Hou, X. Monitoring of long-span bridge deformation based on 3D laser scanning. Ingénierie Des Systèmes D’information 2018, 18, 113–130. [Google Scholar] [CrossRef]
- Zhou, S.; Wu, X.; Qi, Y.; Luo, S.; Xie, X. Video shot boundary detection based on multi-level features collaboration. Signal Image Video Process. 2021, 15, 627–635. [Google Scholar] [CrossRef]
- Hashimoto, R.F.; Barrera, J.; Ferreira, C.E. A Combinatorial Optimization Technique for the Sequential Decomposition of Erosions and Dilations. J. Math. Imaging Vis. 2004, 13, 17–33. [Google Scholar] [CrossRef]
- Pillon, P.E.; Pedrino, E.C.; Roda, V.O.; do Carmo Nicoletti, M. A hardware oriented ad-hoc computer-based method for binary structuring element decomposition based on genetic algorithms. Integr. Comput. Aided Eng. 2016, 23, 369–383. [Google Scholar] [CrossRef]
- Sussner, P.; Pardalos, P.M.; Ritter, G.X. On integer programming approaches for morphological template decomposition problems in computer vision. J. Comb. Optim. 1997, 1, 165–178. [Google Scholar] [CrossRef]
- Deng, S.; Huang, Y. Fast algorithm of dilation and erosion for binary image. Comput. Eng. Appl. 2017, 53, 207–211. [Google Scholar]
- Dokladalova, E. Algorithmes et Architectures Efficaces Pour Vision Embarquée. Ph.D. Thesis, Université Paris Est, Paris, France, 2019. [Google Scholar]
- Chu, X.; Zhou, Z.; Deng, G.; Jiang, T.; Lei, Y. Study on Damage Identification of Beam Bridge Based on Characteristic Curvature and Improved Wavelet Threshold De-Noising Algorithm. Adv. Model. Anal. 2017, 60, 505–524. [Google Scholar] [CrossRef]
- Tengjiao, J. Experimental Study on Damage Conditions of the Steel-Concrete Composite Beam Based on the Bridge Surface; Chongqing Jiaotong University: Chongqing, China, 2018. [Google Scholar]
- Xi, C. Holographic Shape Monitoring and Damage Identification of Bridge Structure Based on Fixed Axis Rotation Photography; Chongqing Jiaotong University: Chongqing, China, 2020. [Google Scholar]
- Andrade, L.C.M.D.; Oleskovicz, M.; Fernandes, R.A.S. Adaptive threshold based on wavelet transform applied to the segmentation of single and combined power quality disturbances. Appl. Soft Comput. 2016, 38, 967–977. [Google Scholar] [CrossRef]
- Hu, Z.; Liu, L. Applications of wavelet analysis in differential propagation phase shift data de-noising. Adv. Atmos. Sci. 2014, 31, 825–835. [Google Scholar] [CrossRef]













































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Damage Conditions | Location of Damage | Loading Situation | Load (KN) |
|---|---|---|---|
| No damage | 0 | ||
| 150 | |||
| 250 | |||
| Damage to a rod | Rod No. 7 | 0 | |
| 150 | |||
| 250 | |||
| Damage to two rods | Rod No. 5 | 0 | |
| 150 | |||
| 250 | |||
| Damage to three rods | Rod No. 4 | 0 | |
| 150 | |||
| 250 |
| Number of Pixels | Sensor Size | Image Size | Aspect Ratio | Pixel Size | Lens Models | Lens Relative Aperture | Focal Length |
|---|---|---|---|---|---|---|---|
| 50.6 million | 3:2 | 4.14 µm | EF 24–70 mm f/2.8LII | F2.8–F22 | 24–70 mm |
| Actual Image Size (Pixel) | Actual Image Centre Size (Pixel) | Actual Focal Length (mm) | Radial Distortion Parameters | Tangential Distortion Parameters | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| X | Y | |||||||||
| 8688 | 5792 | 4319.74 | 2885.85 | 24.3 | 24.3 | 0.122 | 0.108 | 0.024 | 0 | 0 |
| Number of Damaged Rods | Working Conditions | Load (kN) | Deflection Gauge Values (mm) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | L/8 | L/4 | 3L/8 | L/2 | 5L/8 | 3L/4 | 7L/8 | S2 | |||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 150 | 0.717 | 3.884 | 6.101 | 8.696 | 9.514 | 8.725 | 6.33 | 2.696 | 0.732 | ||
| 250 | 0.844 | 5.751 | 9.875 | 14.194 | 15.539 | 14.32 | 10.15 | 4.101 | 0.913 | ||
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 150 | 0.689 | 2.401 | 5.949 | 8.541 | 10.693 | 8.921 | 6.198 | 2.001 | 0.694 | ||
| 250 | 0.828 | 4.213 | 9.668 | 13.871 | 16.815 | 14.103 | 10.104 | 3.319 | 0.851 | ||
| 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 150 | 0.704 | 3.356 | 5.959 | 8.764 | 10.61 | 8.923 | 6.358 | 2.603 | 0.688 | ||
| 250 | 0.813 | 5.336 | 9.62 | 14.107 | 16.67 | 14.521 | 10.14 | 4.288 | 0.843 | ||
| 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 150 | 0.655 | 4.155 | 6.479 | 9.246 | 10.583 | 9.524 | 6.384 | 3.139 | 0.664 | ||
| 250 | 0.805 | 6.102 | 10.234 | 14.589 | 16.631 | 14.782 | 10.134 | 4.558 | 0.822 | ||
| Vertical Truss Rod Number | Number of pixels | Calibration Line Length (mm) | Calibrated Value (mm/px) | Calibration Average (mm/px) |
|---|---|---|---|---|
| 1 | 1986 | 367.17 | 0.1849 | 0.1771 |
| 2 | 1999 | 359.21 | 0.1797 | |
| 3 | 1993 | 360.1 | 0.1807 | |
| 4 | 1991 | 357.3 | 0.1795 | |
| 5 | 1998 | 356.32 | 0.1783 | |
| 6 | 1994 | 312.39 | 0.1567 | |
| 7 | 1989 | 355.91 | 0.1789 | |
| 8 | 2654 | 453.94 | 0.171 | |
| 9 | 1982 | 356.83 | 0.18 | |
| 10 | 1993 | 321.44 | 0.1613 | |
| 11 | 1988 | 357.77 | 0.18 | |
| 12 | 1987 | 356.75 | 0.1795 | |
| 13 | 1994 | 361.37 | 0.1812 | |
| 14 | 1989 | 363.1 | 0.1826 | |
| 15 | 1983 | 359.47 | 0.1813 |
| Vertical Rod Number | Rod Height Extracted from 3D Scan /mm | Rod Height Extracted from Image /mm | Spacing Extracted from 3D Scan /mm | Spacing Extracted from Image /mm |
|---|---|---|---|---|
| 1 | 387.96 | 387.31 | ||
| (−0.65) | 509.87 | 509.43 | ||
| 2 | 379.41 | 380.24 | (−0.44) | |
| (0.83) | 503.01 | 503.74 | ||
| 3 | 380.67 | 380.31 | (0.73) | |
| (−0.36) | 501.74 | 502.21 | ||
| 4 | 377.67 | 378.06 | (0.47) | |
| (0.39) | 500.58 | 499.76 | ||
| 5 | 376.83 | 376.26 | (−0.82) | |
| (−0.57) | 491.36 | 491.05 | ||
| 6 | 332.09 | 332.59 | (−0.31) | |
| (0.5) | 517.49 | 517.79 | ||
| 7 | 375.21 | 375.59 | (0.30) | |
| (0.38) | 503.05 | 503.22 | ||
| 8 | 473.48 | 474.46 | (0.17) | |
| (0.98) | 507.04 | 507.28 | ||
| 9 | 376.98 | 376.76 | (0.24) | |
| (−0.22) | 523.49 | 524.12 | ||
| 10 | 341.28 | 342.06 | (0.63) | |
| (0.78) | 488.16 | 488.74 | ||
| 11 | 377.17 | 377.25 | (0.58) | |
| (0.08) | 508.43 | 507.96 | ||
| 12 | 376.15 | 375.74 | (−0.47) | |
| (−0.41) | 509.25 | 509.44 | ||
| 13 | 381.90 | 382.41 | (0.19) | |
| (0.51) | 509.56 | 509.86 | ||
| 14 | 383.17 | 383.45 | (0.30) | |
| (0.28) | 513.39 | 512.81 | ||
| 15 | 379.50 | 379.21 | (−0.58) | |
| (−0.29) |
| Load Conditions | Load | Deflection Gauge Location | Deflection Gauge Values | Deformation Curve Values | Error |
|---|---|---|---|---|---|
| 150 kN | S1 | 0.655 | 0.634 | 3.11 | |
| L/8 | 4.155 | 4.184 | 0.70 | ||
| L/4 | 6.479 | 6.609 | 2.02 | ||
| 3L/8 | 9.246 | 8.929 | 3.42 | ||
| L/2 | 10.583 | 10.464 | 1.12 | ||
| 5L/8 | 9.524 | 9.807 | 2.98 | ||
| 3L/4 | 6.384 | 6.559 | 2.75 | ||
| 7L/8 | 3.139 | 3.222 | 2.65 | ||
| S2 | 0.664 | 0.647 | 2.56 | ||
| 250 kN | S1 | 0.805 | 0.779 | 3.19 | |
| L/8 | 6.102 | 6.258 | 2.56 | ||
| L/4 | 10.234 | 10.229 | 0.04 | ||
| 3L/8 | 14.589 | 14.842 | 1.74 | ||
| L/2 | 16.631 | 16.536 | 0.57 | ||
| 5L/8 | 14.782 | 14.434 | 2.35 | ||
| 3L/4 | 10.134 | 10.441 | 3.03 | ||
| 7L/8 | 4.558 | 4.43 | 2.80 | ||
| S2 | 0.822 | 0.806 | 1.88 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, R.; Zhou, Z.; Chu, X.; Liao, X.; Meng, J. Research on Damage Localization of Steel Truss–Concrete Composite Beam Based on Digital Orthoimage. Appl. Sci. 2022, 12, 3883. https://doi.org/10.3390/app12083883
Luo R, Zhou Z, Chu X, Liao X, Meng J. Research on Damage Localization of Steel Truss–Concrete Composite Beam Based on Digital Orthoimage. Applied Sciences. 2022; 12(8):3883. https://doi.org/10.3390/app12083883
Chicago/Turabian StyleLuo, Rui, Zhixiang Zhou, Xi Chu, Xiaoliang Liao, and Junhao Meng. 2022. "Research on Damage Localization of Steel Truss–Concrete Composite Beam Based on Digital Orthoimage" Applied Sciences 12, no. 8: 3883. https://doi.org/10.3390/app12083883