
A Characterization Method for Pavement Structural Condition Assessment Based on the Distribution Parameter of the Vehicle Vibration Signal

Abstract
:Featured Application
Abstract
1. Introduction
2. Test Introduction
2.1. Pavement Condition
2.2. Test Condition
2.2.1. Deflection Test
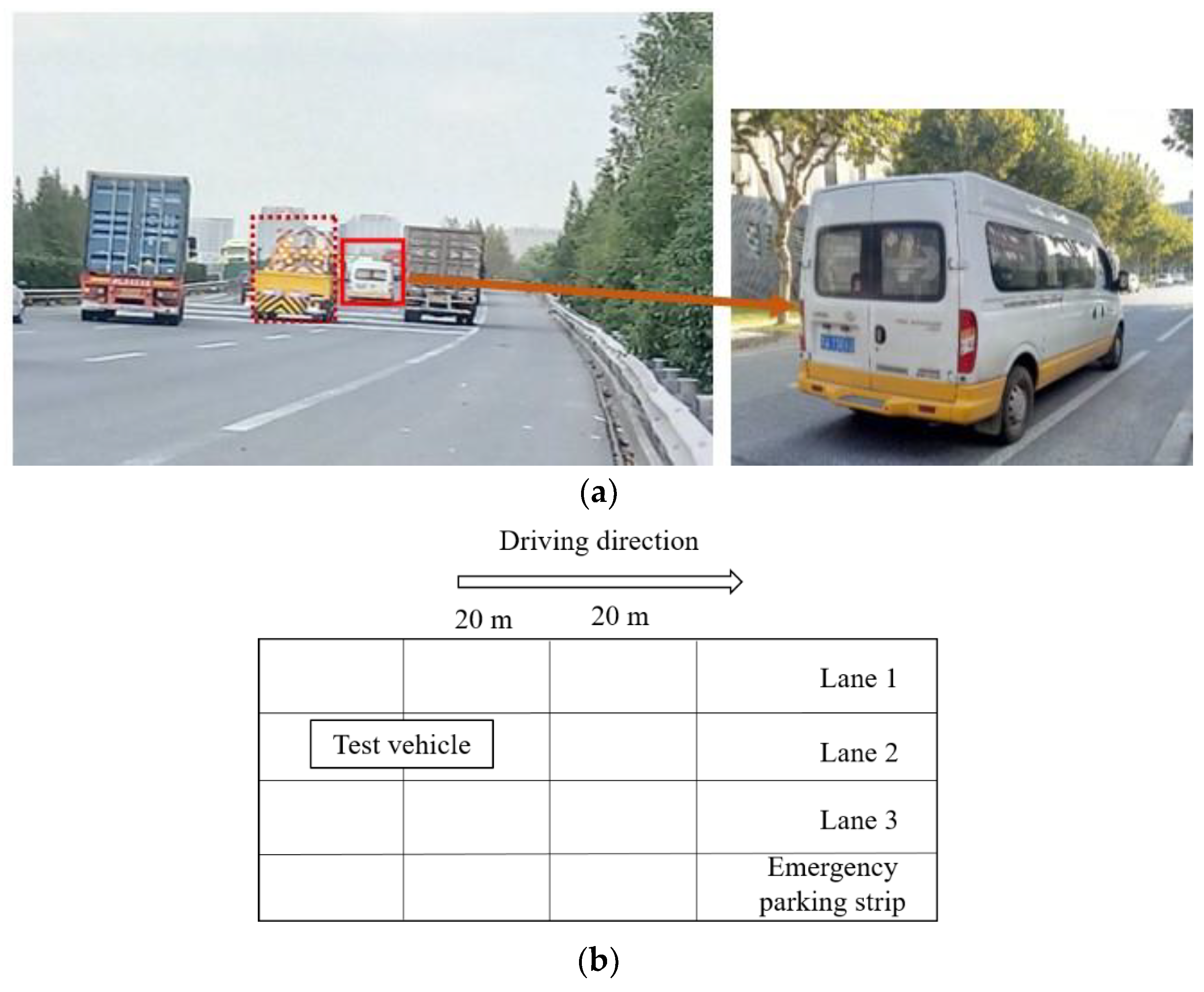
2.2.2. Vehicle Vibration Test
3. Test Result Analysis
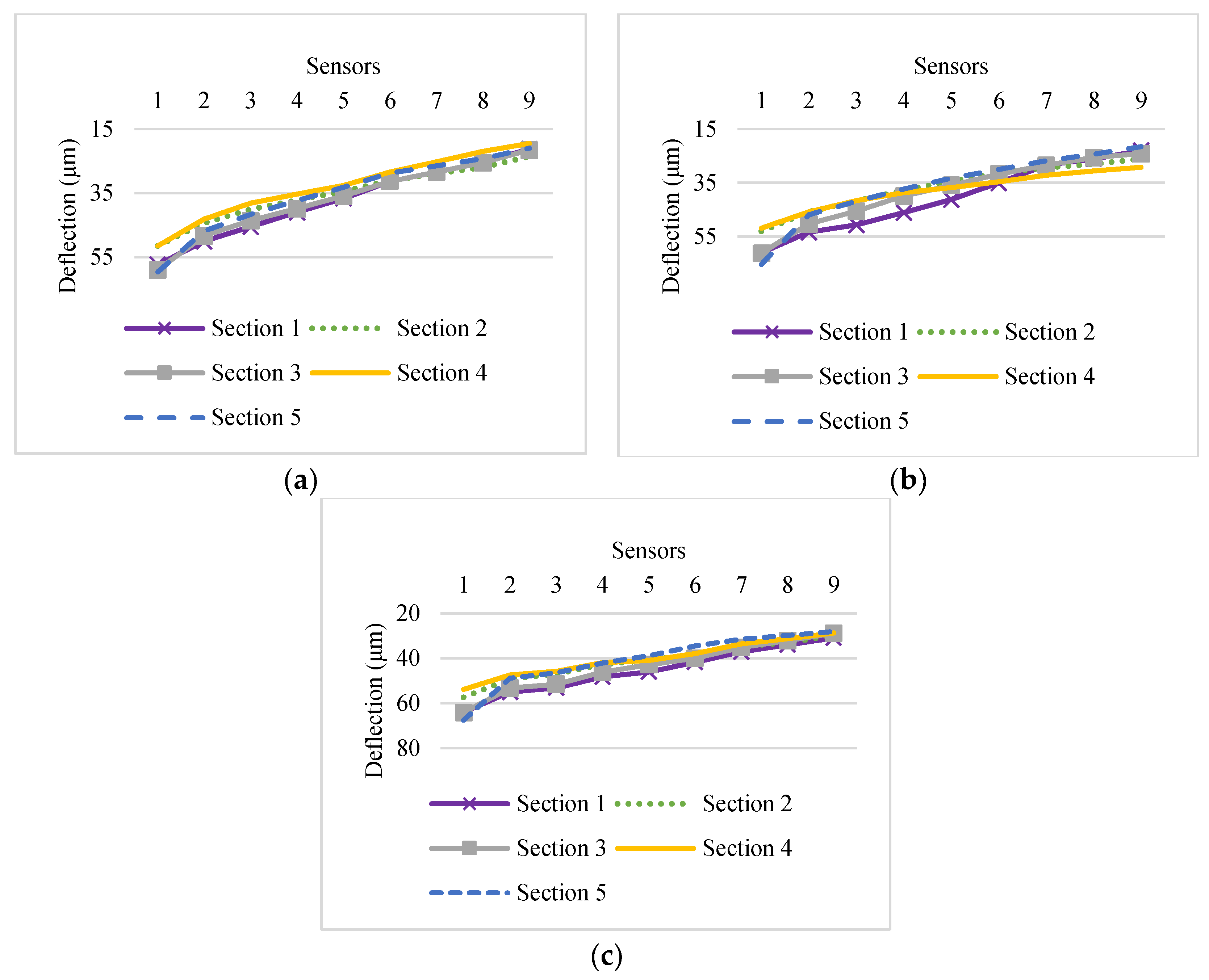
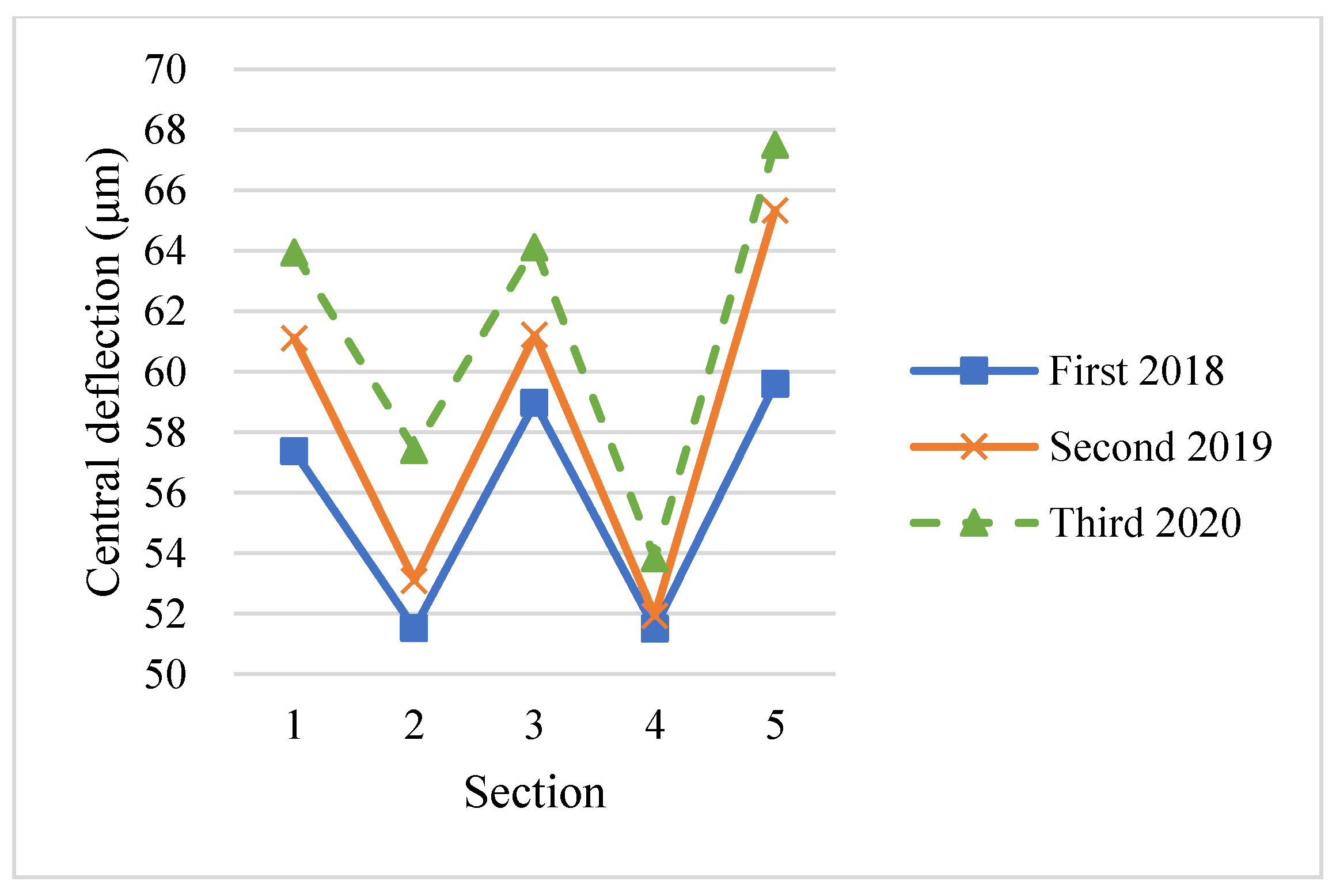
3.1. Deflection Test
- The structural stiffness of the junction (Section 3) of the two pavement structures is in the middle;
- With the extension of the operating time, D1 has increased, indicating that the pavement structural stiffness has decreased.
3.2. Vehicle Acceleration Analysis
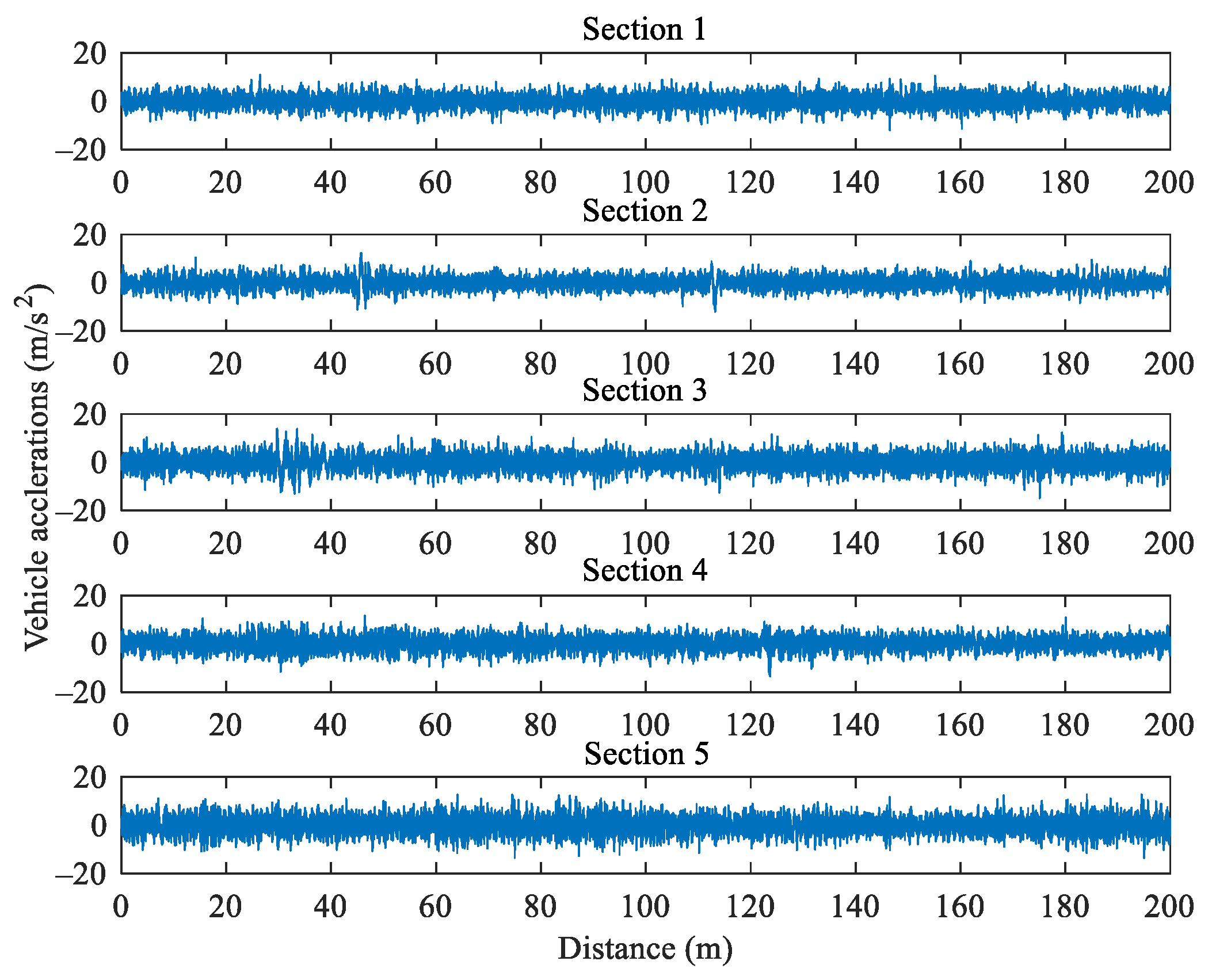
3.2.1. Accelerogram Analysis
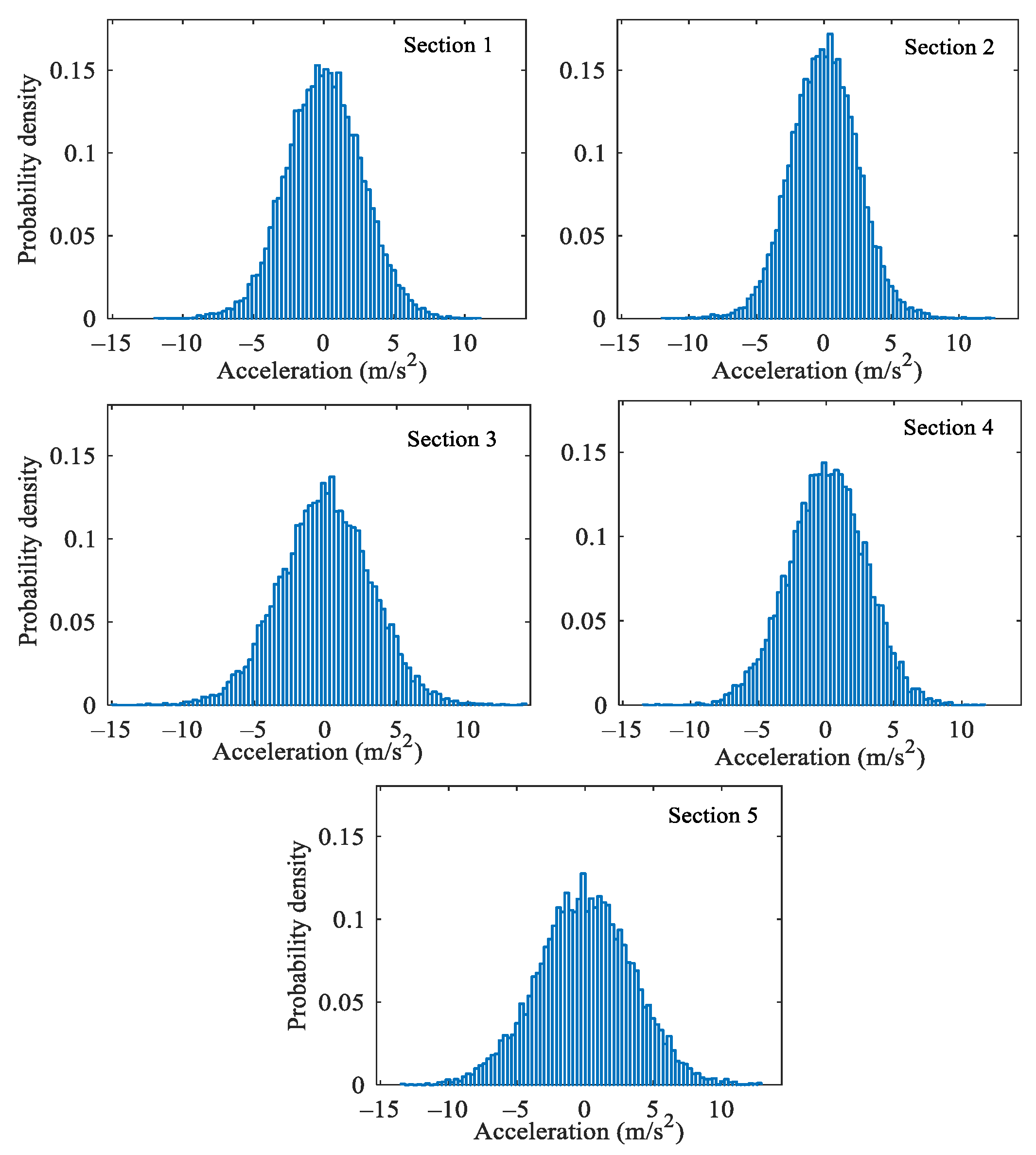
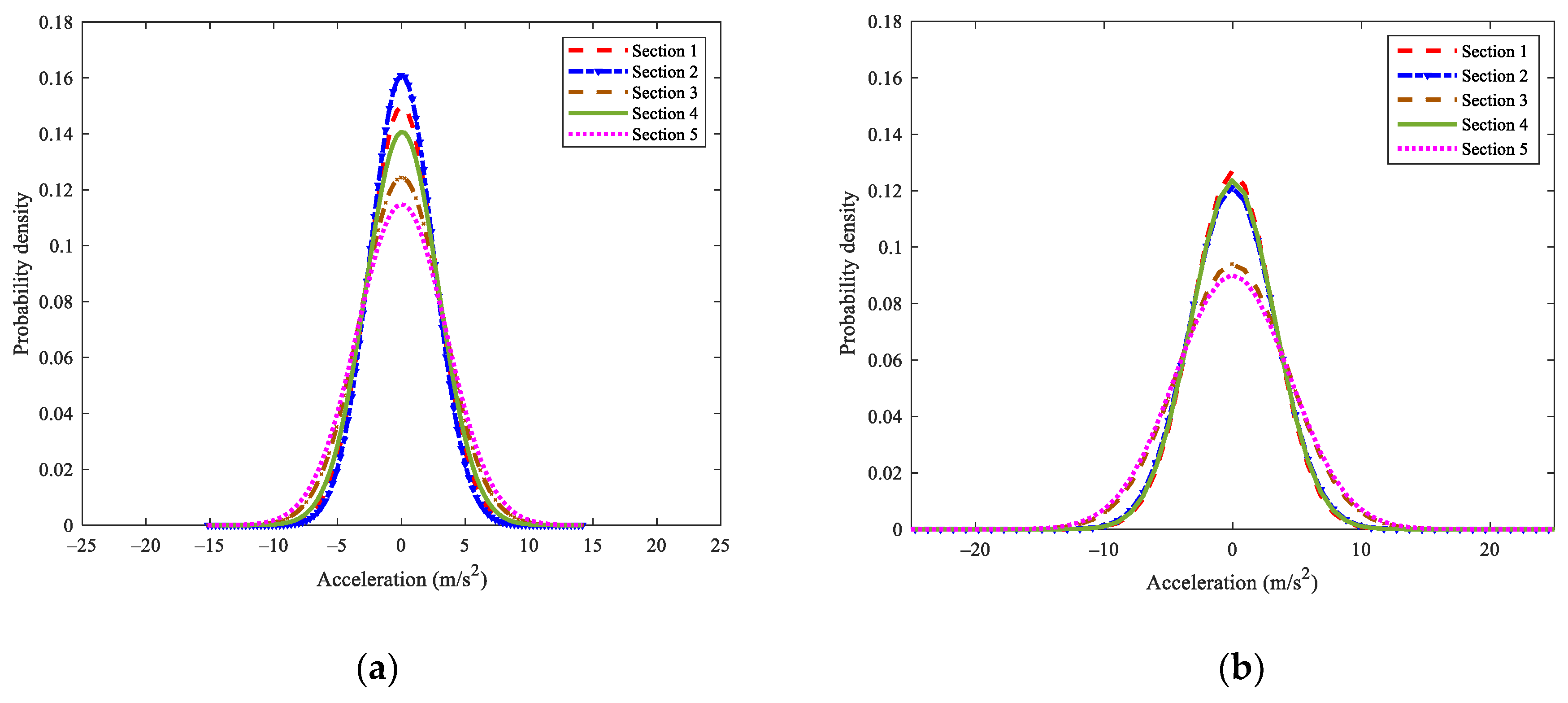
3.2.2. Acceleration Statistical Analysis
3.3. Correlation Analysis of Vehicle Acceleration and Pavement Surface Deflection
4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Quqa, S.; Giordano, P.F.; Limongelli, M.P. Shared micromobility-driven modal identification of urban bridges. Autom. Constr. 2021, 134, 104048. [Google Scholar] [CrossRef]
- Zhao, H.D.; Wu, D.F.; Zeng, M.Y.; Zhong, S. A Vibration-Based Vehicle Classification System using Distributed Optical Sensing Technology. Transp. Res. Rec. 2018, 2672, 12–23. [Google Scholar] [CrossRef]
- Guattari, C.; D’Amico, F.; Benedetto, A. Integrated road pavement survey using GPR and LFWD. In Proceedings of the XIII Internarional Conference on Ground Penetrating Radar, Lecce, Italy, 21–25 June 2010. [Google Scholar]
- Mehta, Y.; Roque, R. Evaluation of FWD data for determination of layer moduli of pavements. J. Mater. Civ. Eng. 2003, 15, 25–31. [Google Scholar] [CrossRef]
- Lai, J.C.; Liu, J.; Huang, C.W. The Application of Frequency-Temperature Superposition Principle for Back-Calculation of Falling Weight Deflectometer. Appl. Sci. 2020, 10, 132. [Google Scholar] [CrossRef] [Green Version]
- Xie, Z.; Cong, L.; Guo, Z. Evaluation of Subsoil Modulus for Asphalt Pavement Based on FWD Deflection Basin Parameter. J. Highw. Transp. Res. Dev. 2009, 26, 28–31. [Google Scholar]
- Hou, Y. Evaluation of Layered Material Properties from Measured Surface Deflection. Ph.D. Thesis, University of Utah, Salt Lake, UT, USA, 1977. [Google Scholar]
- Li, M.Y.; Wang, H. Development of ANN-GA program for backcalculation of pavement moduli under FWD testing with viscoelastic and nonlinear parameters. Int. J. Pavement Eng. 2019, 20, 490–498. [Google Scholar] [CrossRef]
- Seraj, F.; Van Der Zwaag, B.J.; Dilo, A.; Luarasi, T.; Havinga, P. Roads: A road pavement monitoring system for anomaly detection using smart phones. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2016; pp. 128–146. [Google Scholar]
- Chuang, Y.; Perng, N.H.; Han, J.Y. Pavement performance monitoring and anomaly recognition based on crowdsourcing spatiotemporal data. Autom. Constr. 2019, 160, 102882. [Google Scholar] [CrossRef]
- Liu, C.L.; Wu, D.F.; Li, Y.S.; Jiang, S.C.; Du, Y.C. Mathematical insights into the relationship between pavement roughness and vehicle vibration. Int. J. Pavement Eng. 2020. [Google Scholar] [CrossRef]
- Harikrishnan, P.M.; Gopi, V.P. Vehicle Vibration Signal Processing for Road Surface Monitoring. IEEE Sens. J. 2017, 17, 5192–5197. [Google Scholar] [CrossRef]
- Yang, Q.; Zhou, S.S. Identification of asphalt pavement transverse cracking based on vehicle vibration signal analysis. Road Mater. Pavement Des. 2021, 20, 1780–1798. [Google Scholar] [CrossRef]
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using Android smartphones with accelerometers. In Proceedings of the 2011 International Conference on Distributed Computing in Sensor Systems (DCOSS 2011), Barcelona, Spain, 27–29 June 2011. [Google Scholar]
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound. Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Lin, C.W.; Yang, Y.B. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yau, J.D.; Urushadze, S. Scanning the modal coupling of slender suspension footbridges by a virtual moving vehicle. Eng. Struct. 2019, 180, 574–585. [Google Scholar] [CrossRef]
- Yang, Y.; Jia, B.Y.L. Structural damage identification of a bridge from a passing test vehicle using frequency domain method. In Mechanics of Structures and Materials: Advancements and Challenges, Proceedings of the 24th Australasian Conference on the Mechanics of Structures and Materials, ACMSM24 2016, Perth, Australia, 6–9 December 2016; CRC Press/Balkem: Perth, Australia, 2017; pp. 1125–1130. [Google Scholar]
- Yang, Y.B.; Yang, J.P. State-of-the-Art Review on Modal Identification and Damage Detection of Bridges by Moving Test Vehicles. Int. J. Struct. Stab. Dyn. 2018, 18, 1850025. [Google Scholar] [CrossRef]
- Cerda, F.; Garrett, J.; Bielak, J.; Barrera, J.; Zhuang, Z.; Chen, S.; McCann, M.; Kovaevi, J.; Rizzo, P. Indirect structural health monitoring in bridges: Scale experiments. In Proceedings of the Sixth International Conference on Bridge Maintenance, Safety and Management, Stresa, Italy, 8–12 July 2012; pp. 346–353. [Google Scholar]
- Liu, J.; Chen, B.; Chen, S.; Berges, M.; Bielak, J.; Noh, H. Damage-Sensitive and Domain-Invariant Feature Extraction for Vehicle-Vibration-Based Bridge Health Monitoring. In Proceedings of the ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing, Barcelona, Spain, 4–8 May 2020; pp. 3007–3011. [Google Scholar]
- Feng, M.; Fukuda, Y.; Mizuta, M.; Ozer, E. Citizen sensors for SHM: Use of accelerometer data from smartphones. Sensors 2015, 15, 2980–2998. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McGetrick, P.J.; Hester, D.; Taylor, S.E. Implementation of a drive-by monitoring system for transport infrastructure utilising smartphone technology and GNSS. J. Civ. Struct. Health Monit. 2017, 7, 175–189. [Google Scholar] [CrossRef] [Green Version]
- Du, Y.C.; Liu, C.L.; Wu, D.F.; Jiang, S.C. Measurement of International Roughness Index by Using Z-Axis Accelerometers and GPS. Math. Probl. Eng. 2014, 2014, 928980. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Tang, X. Wavelet Denoise Method Applied in Load Spectrum Analysis of Engineering Vehicles. Adv. Mater. Res. 2010, 108, 1320–1325. [Google Scholar] [CrossRef]
- David, S.M.; William, N. Methods of describing correlations: Scatter diagrams and correlation coefficients. In Statistics: Concepts and Controversies, 8th ed.; CMC Publishing House: Golden, CO, USA, 2017; pp. 280–385. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Length | Structure | Cross-Section |
|---|---|---|---|
| 1 | 200 m | Continuously reinforced composite pavement A | Two-way 4-lane |
| 2 | 200 m | Continuously reinforced composite pavement B | Two-way 6-lane |
| 3 | 200 m | Continuously reinforced composite pavement B + semi-rigid base pavement | Two-way 6-lane |
| 4 | 200 m | Continuously reinforced composite pavement C | Two-way 6-lane |
| 5 | 200 m | Semi-rigid base pavement | Two-way 6-lane |
| Section 1 | Section 2 | Section 3 | Section 4 | Section 5 | |
|---|---|---|---|---|---|
| 4 cm SMA-13 (SBS modified) | 4 cm SMA-13 (SBS modified) | 4 cm SMA-13 (SBS modified) | 4 cm SMA-13 (SBS modified) | 4 cm SMA-13 (SBS modified) | 4 cm SMA-13 (SBS modified) |
| 6 cm AC-20C (anti-rutting agent) | 6 cm AC-20C (anti-rutting agent) | 6 cm AC-20C (anti-rutting agent) | 6 cm AC-20C (anti-rutting agent) | 6 cm AC-20C (anti-rutting agent) | 6 cm AC-20C (anti-rutting agent) |
| 26 cm continuously reinforced concrete | 26 cm continuously reinforced concrete | 8 cm AC-25C (rock asphalt modification) | 26 cm continuously reinforced concrete | 26 cm continuously reinforced concrete | 8 cm AC-25C (rock asphalt modification) |
| -- | -- | 0.6 cm slurry seal | -- | 0.6 cm slurry seal | 0.6 cm slurry seal |
| 20 cm cold regeneration (three-slag base regeneration) | 20 cm plain concrete | 40 cm cement stabilized macadam | 20 cm plain concrete | 40 cm cement stabilized crushed stone leveling layer | 40 cm cement stabilized macadam |
| 20 cm graded gravel | |||||
| Test | 1st | 2nd | 3rd | 4th |
|---|---|---|---|---|
| Date | 23 September 2018 | 9 September 2019 | 20 September 2020 | 21 May 2021 |
| Temperature | 22~27 °C | 23~28 °C | 21~27 °C | 22~27 °C |
| |r| | 0.8~1.0 | 0.6~0.8 | 0.4~0.6 | 0.2~0.4 | 0~0.2 |
|---|---|---|---|---|---|
| Correlation degree | Very strong | Strong | Middle | Weak | Very weak or no correlation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Zhou, S.; Yang, Q. A Characterization Method for Pavement Structural Condition Assessment Based on the Distribution Parameter of the Vehicle Vibration Signal. Appl. Sci. 2022, 12, 683. https://doi.org/10.3390/app12020683
Wang W, Zhou S, Yang Q. A Characterization Method for Pavement Structural Condition Assessment Based on the Distribution Parameter of the Vehicle Vibration Signal. Applied Sciences. 2022; 12(2):683. https://doi.org/10.3390/app12020683
Chicago/Turabian StyleWang, Weiguo, Shishi Zhou, and Qun Yang. 2022. "A Characterization Method for Pavement Structural Condition Assessment Based on the Distribution Parameter of the Vehicle Vibration Signal" Applied Sciences 12, no. 2: 683. https://doi.org/10.3390/app12020683