
A Reversible Hydropump–Turbine System

 , ,
, ,
Abstract
:1. Introduction
2. Preliminaries
Port-Hamiltonian Framework
3. An Energy-Based Model Relative to the Reversible Hydropump–Turbine System
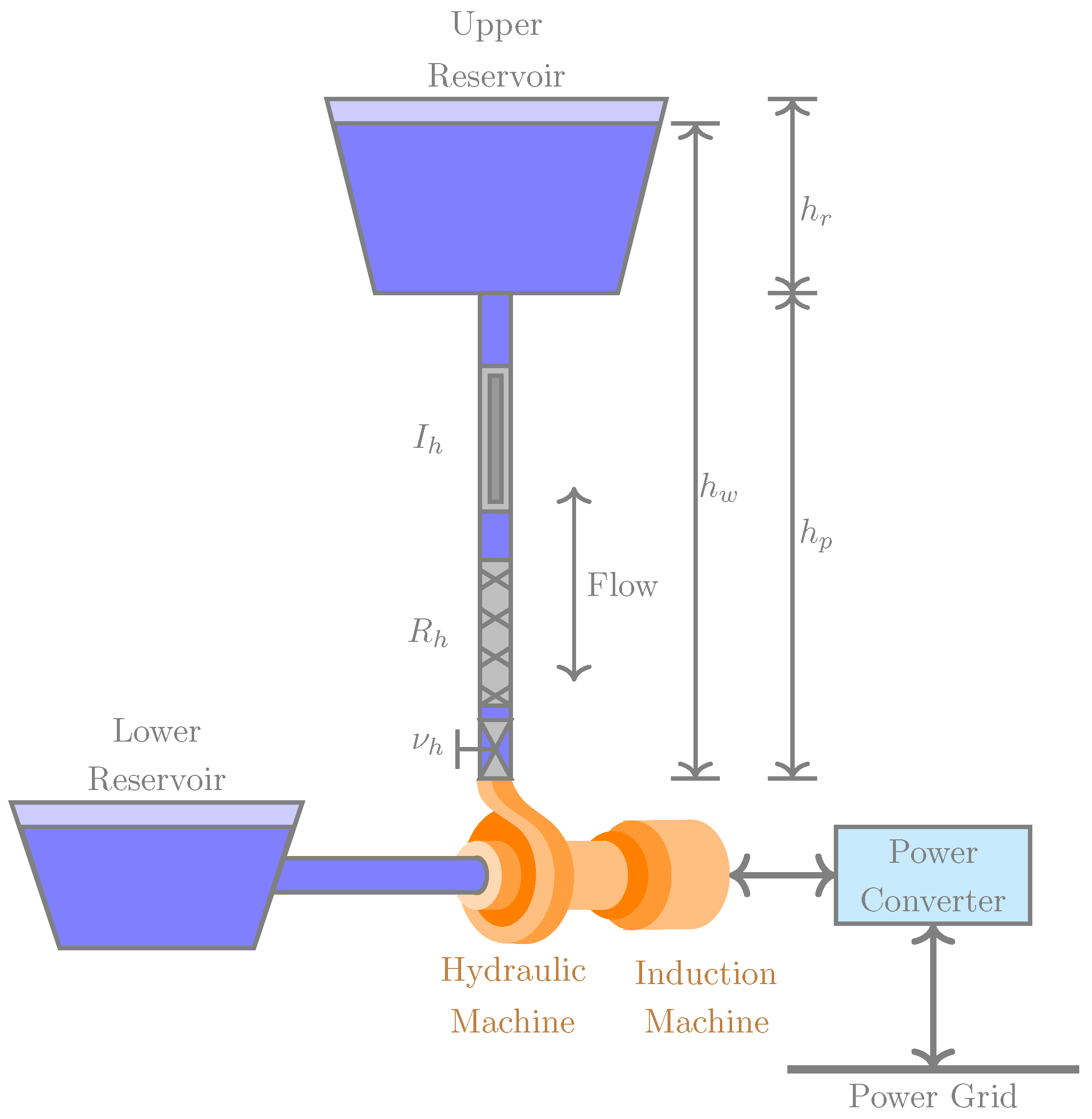
3.1. System’s Architecture
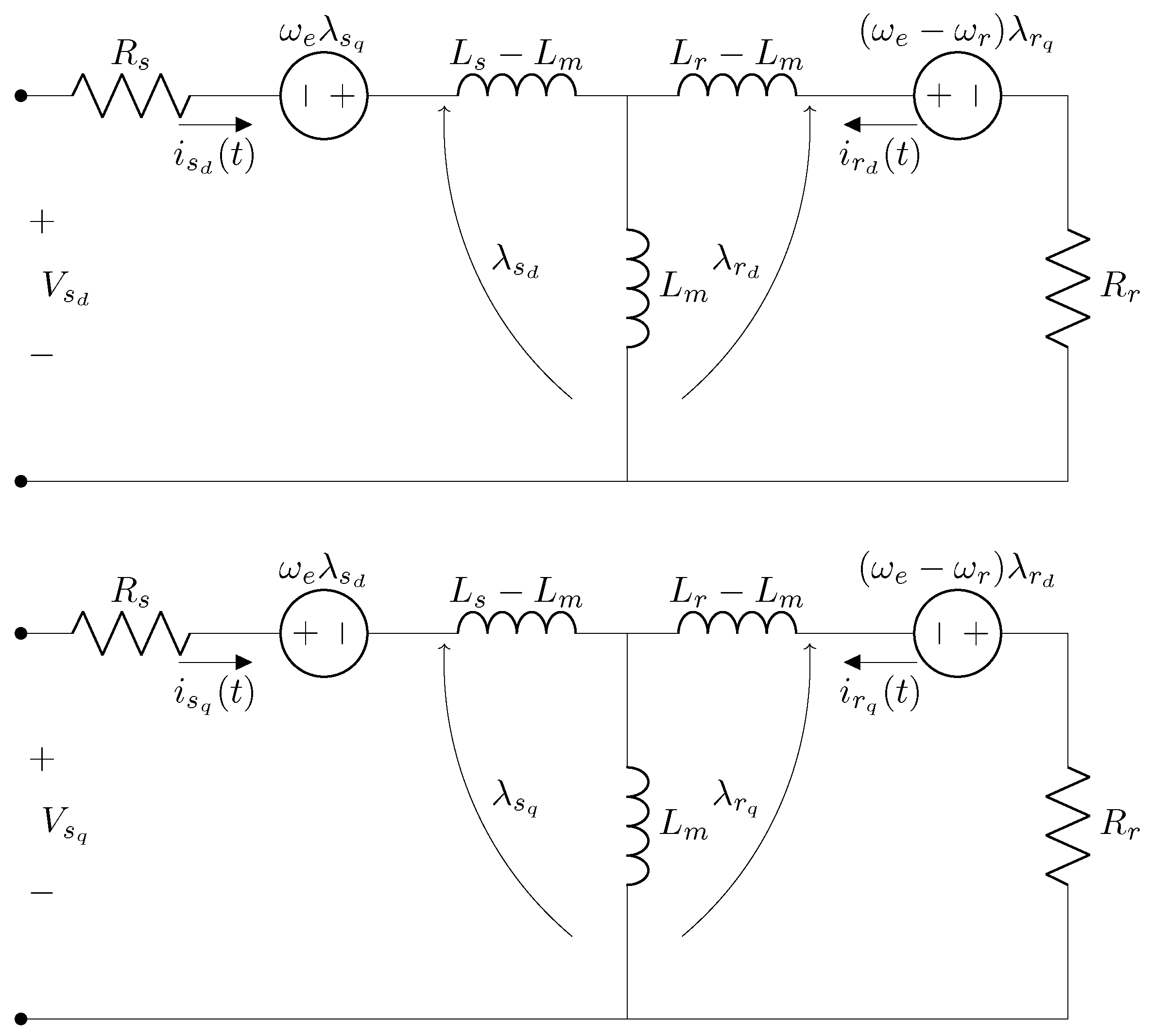
3.2. Motor Configuration of the Asynchronous Machine
3.3. A Reversible Hydropump–Turbine System
3.3.1. Hydro-Centrifugal Pump Domain
3.3.2. Mechanical Domain
3.3.3. Hydro-Mechanical Coupling Domain
3.3.4. Hydropump System
3.3.5. Hydroturbine System
3.3.6. A Reversible Hydropump–Turbine System (Main Result)
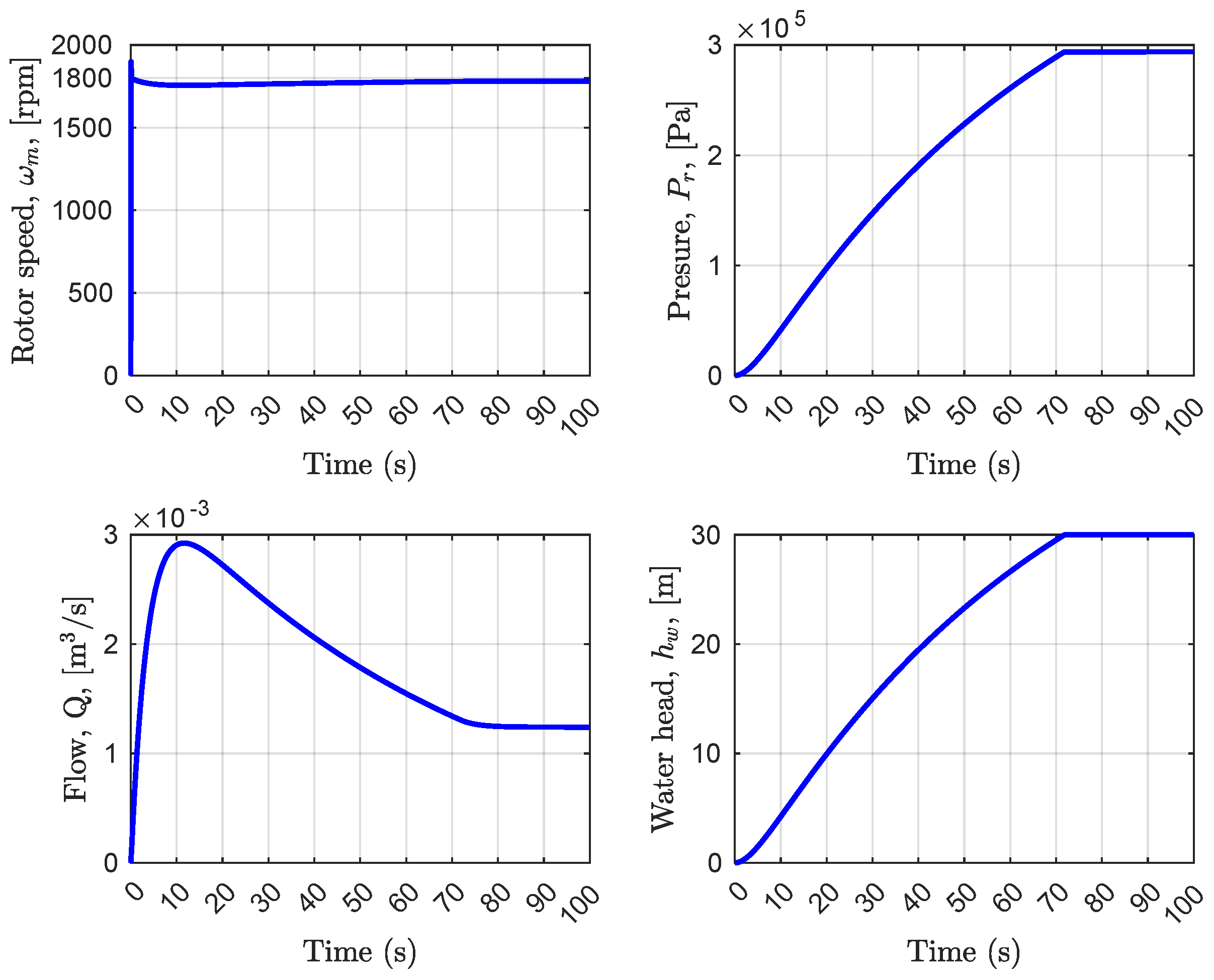
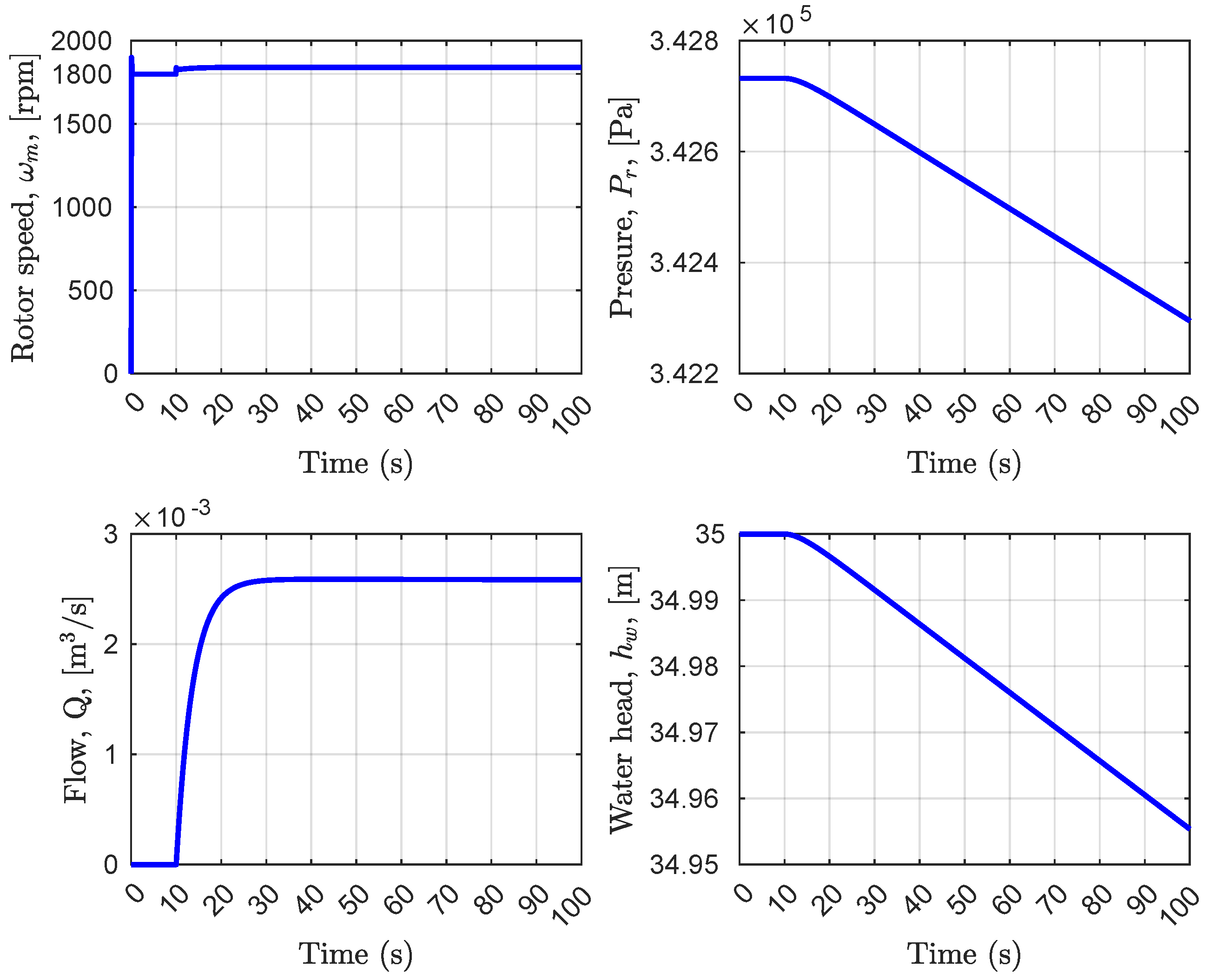
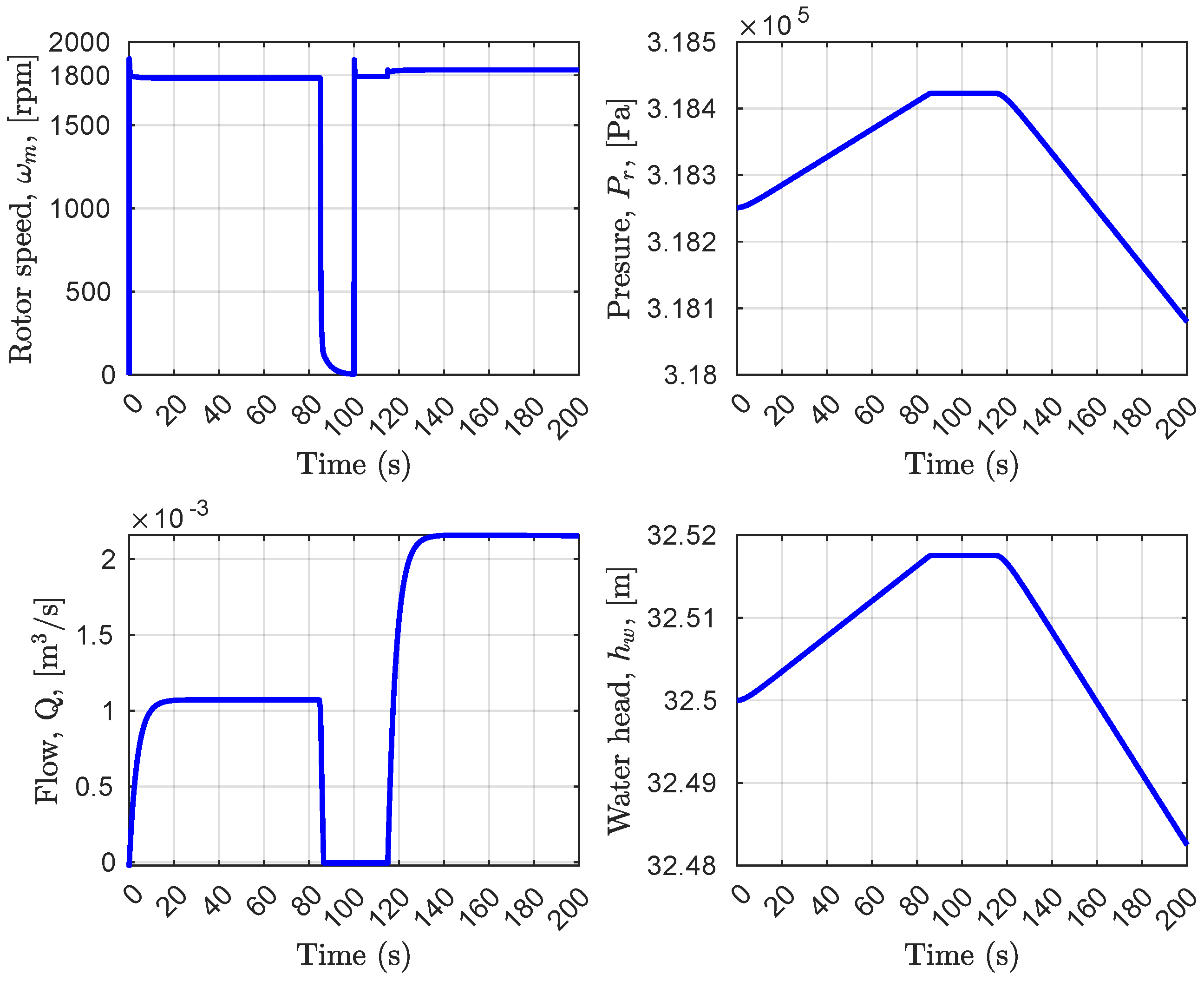
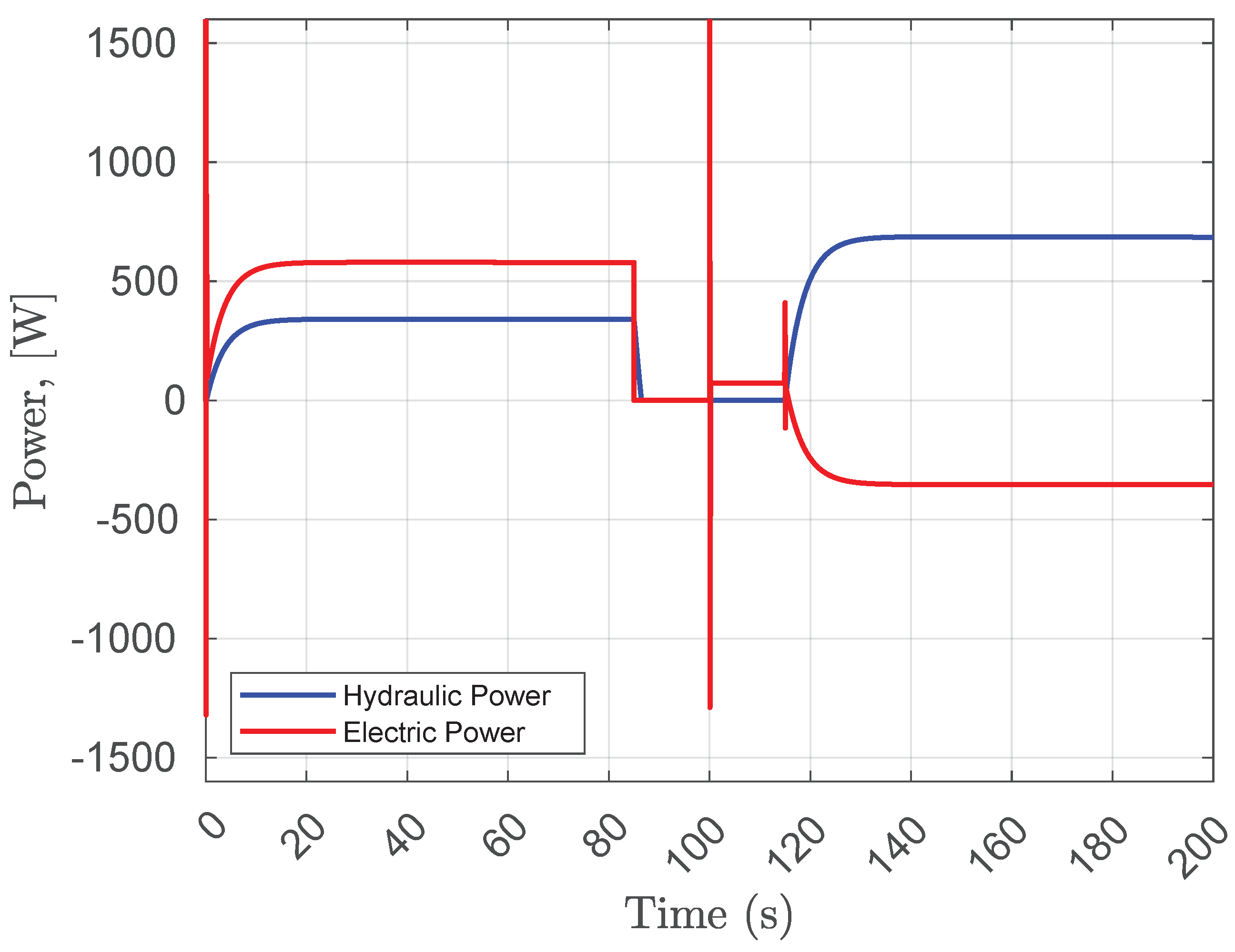
4. Results of Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rehman, S.; Al-Hadhrami, L.M.; Alam, M.M. Pumped hydro energy storage system: A technological review. Renew. Sustain. Energy Rev. 2015, 44, 586–598. [Google Scholar] [CrossRef]
- Cavazzini, G.; Houdeline, J.B.; Pavesi, G.; Teller, O.; Ardizzon, G. Unstable behaviour of pump-turbines and its effects on power regulation capacity of pumped-hydro energy storage plants. Renew. Sustain. Energy Rev. 2018, 94, 399–409. [Google Scholar] [CrossRef]
- Jain, S.V.; Patel, R.N. Investigations on pump running in turbine mode: A review of the state-of-the-art. Renew. Sustain. Energy Rev. 2014, 30, 841–868. [Google Scholar] [CrossRef]
- Shankar, V.K.A.; Umashankar, S.; Paramasivam, S.; Hanigovszki, N. A comprehensive review on energy efficiency enhancement initiatives in centrifugal pumping system. Appl. Energy 2016, 181, 495–513. [Google Scholar] [CrossRef]
- Betka, A.; Moussi, A. Performance optimization of a photovoltaic induction motor pumping system. Renew. Energy 2004, 29, 2167–2181. [Google Scholar] [CrossRef]
- Goppelt, F.; Hieninger, T.; Schmidt-Vollus, R. Modeling Centrifugal Pump Systems from a System-Theoretical Point of View. In Proceedings of the 2018 18th International Conference on Mechatronics—Mechatronika (ME), Brno, Czech Republic, 5–7 December 2018; pp. 1–8. [Google Scholar]
- Wang, L.; Zhang, K.; Zhao, W. Nonlinear Modeling of Dynamic Characteristics of Pump-Turbine. Energies 2022, 15, 297. [Google Scholar] [CrossRef]
- Zhang, N.; Xue, X.; Sun, N.; Gu, Y.; Jiang, W.; Li, C. Nonlinear Modeling and Stability of a Doubly-Fed Variable Speed Pumped Storage Power Station with Surge Tank Considering Nonlinear Pump Turbine Characteristics. Energies 2022, 15, 4131. [Google Scholar] [CrossRef]
- Guo, W.; Zhu, D. Nonlinear modeling and operation stability of variable speed pumped storage power station. Energy Sci. Eng. 2021, 9, 1703–1718. [Google Scholar] [CrossRef]
- Mennemann, J.F.; Marko, L.; Schmidt, J.; Kemmetmüller, W.; Kugi, A. Nonlinear model predictive control of a variable-speed pumped-storage power plant. IEEE Trans. Control Syst. Technol. 2019, 29, 645–660. [Google Scholar] [CrossRef]
- Perryman, R.; Taylor, J.A.; Karney, B. Port-Hamiltonian Based Control of Water Distribution Networks. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4097576 (accessed on 10 June 2022).
- Li, H.; Chen, D.; Tolo, S.; Xu, B.; Patelli, E. Hamiltonian Formulation and Analysis for Transient Dynamics of Multi-Unit Hydropower System. J. Comput. Nonlinear Dyn. 2018, 13, 101004. [Google Scholar] [CrossRef]
- Gil-González, W.J.; Garces, A.; Fosso, O.B.; Escobar-Mejía, A. Passivity-Based Control of Power Systems Considering Hydro-Turbine with Surge Tank. IEEE Trans. Power Syst. 2020, 35, 2002–2011. [Google Scholar] [CrossRef]
- Phillips-Brenes, H.; Pereira-Arroyo, R.; Muñoz-Arias, M. Energy-based model of a solar-powered pumped-hydro storage system. In Proceedings of the 2019 IEEE 39th Central America and Panama Convention (CONCAPAN XXXIX), Guatemala City, Guatemala, 20–22 November 2019. [Google Scholar]
- Gonzalez, H.; Duarte-Mermoud, M.A.; Pelissier, I.; Travieso-Torres, J.C.; Ortega, R. A novel induction motor control scheme using IDA-PBC. J. Control Theory Appl. 2008, 6, 59–68. [Google Scholar]
- Yu, H.; Yu, J.; Liu, J.; Song, Q. Nonlinear control of induction motors based on state error PCH and energy-shaping principle. Nonlinear Dyn. 2013, 72, 49–59. [Google Scholar] [CrossRef]
- Esquivel-Sancho, L.; Pereira-Arroyo, R.; Muñoz Arias, M. An energy-based modeling approach to the induction machine. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June–2 July 2021. [Google Scholar]
- Esquivel-Sancho, L.; Pereira-Arroyo, R.; Muñoz Arias, M. Voltage regulation for a self-excited induction generator. In Proceedings of the 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 14–17 December 2021. [Google Scholar]
- Maschke, B.M.; van der Schaft, A.J. Port-controlled Hamiltonian systems: Modelling origins and systemtheoretic properties. IFAC Proc. Vol. 1992, 25, 359–365. [Google Scholar] [CrossRef]
- van der Schaft, A. L2-Gain and Passivity Techniques in Nonlinear Control; Springer: London, UK, 2000. [Google Scholar]
- Brogliato, B.; Lozano, R.; Maschke, B.; Egeland, O. Dissipative systems analysis and control. Theory Appl. 2007, 2, 2–5. [Google Scholar]
- Chan-Zheng, C.; Muñoz-Arias, M.; Scherpen, J.M. Tuning rules for passivity-based integral control for a class of mechanical systems. IEEE Control Syst. Lett. 2022, 7, 37–42. [Google Scholar] [CrossRef]
- Lee, R.; Pillay, P.; Harley, R. D, Q reference frames for the simulation of induction motors. Electr. Power Syst. Res. 1984, 8, 15–26. [Google Scholar] [CrossRef]
- Bimal, K. Modern Power Electronics and AC Drives; Prentice Hall PTR: Hoboken, NJ, USA, 2003. [Google Scholar]
- Stanley, H.C. An analysis of the induction machine. Electr. Eng. 1938, 57, 751–757. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| IM Stator resistance | 1.115 | |
| IN Rotor resistance | 1.083 | |
| IM Stator inductance | 0.20965 | |
| IM Rotor inductance | 0.20965 | |
| IM Magnetization inductance | 0.2037 | |
| IM Number of pole pairs | 2 | |
| IM Rotational inertia | 0.02 | |
| IM Rotor friction coefficient | 0.005752 | |
| IM Nominal voltage | 460 | |
| IM Operating frequency | f | 60 |
| IM Mechanical speed | 1750 | |
| IM Number of phases factor | ||
| Pump rotational inertia | 0.008 | |
| Pump friction coefficient | 0.005752 | |
| Water density | ||
| Gravitational constant | g | |
| Fluid dynamic viscosity | ||
| Pipe length | ||
| Pipe height | ||
| Reservoir height | ||
| Pipe crossection area | ||
| Reservoir crossection area | ||
| Pump Speed-flow constant | 191,000 | |
| Turbine Speed-flow constant | 91,000 | |
| Pump Speed-presure constant | ||
| Turbine Speed-presure constant |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esquivel-Sancho, L.M.; Muñoz-Arias, M.; Phillips-Brenes, H.; Pereira-Arroyo, R. A Reversible Hydropump–Turbine System. Appl. Sci. 2022, 12, 9086. https://doi.org/10.3390/app12189086
Esquivel-Sancho LM, Muñoz-Arias M, Phillips-Brenes H, Pereira-Arroyo R. A Reversible Hydropump–Turbine System. Applied Sciences. 2022; 12(18):9086. https://doi.org/10.3390/app12189086
Chicago/Turabian StyleEsquivel-Sancho, Luis Miguel, Mauricio Muñoz-Arias, Hayden Phillips-Brenes, and Roberto Pereira-Arroyo. 2022. "A Reversible Hydropump–Turbine System" Applied Sciences 12, no. 18: 9086. https://doi.org/10.3390/app12189086