
Time-Varying Pilot’s Intention Identification Based on ESAX-CSA-ELM Classification Method in Complex Environment



Abstract
:1. Introduction
2. Materials
2.1. Experimental Design
2.2. Experimental Design
2.3. Experimental Participants
2.4. Experimental Data
3. Methods
3.1. Data Processing
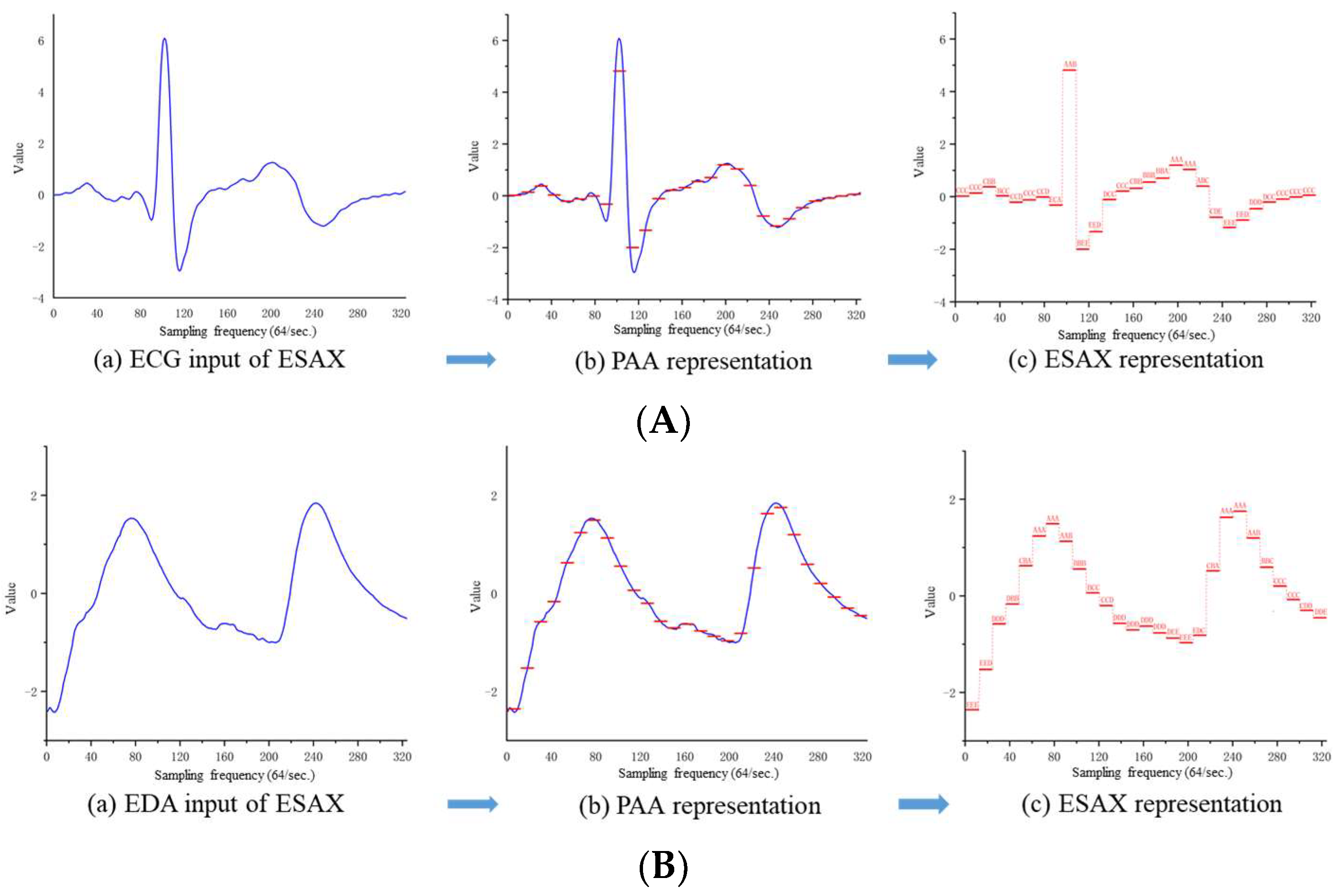
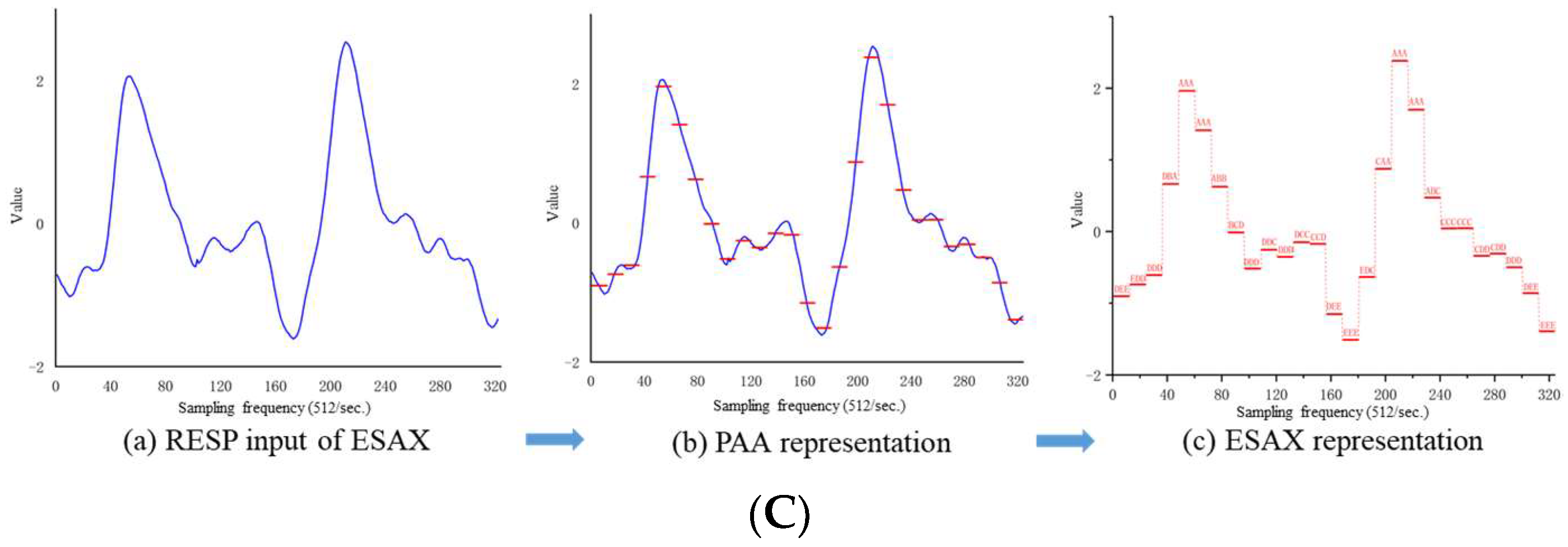
3.2. Extension of Symbolic Aggregate Approximation
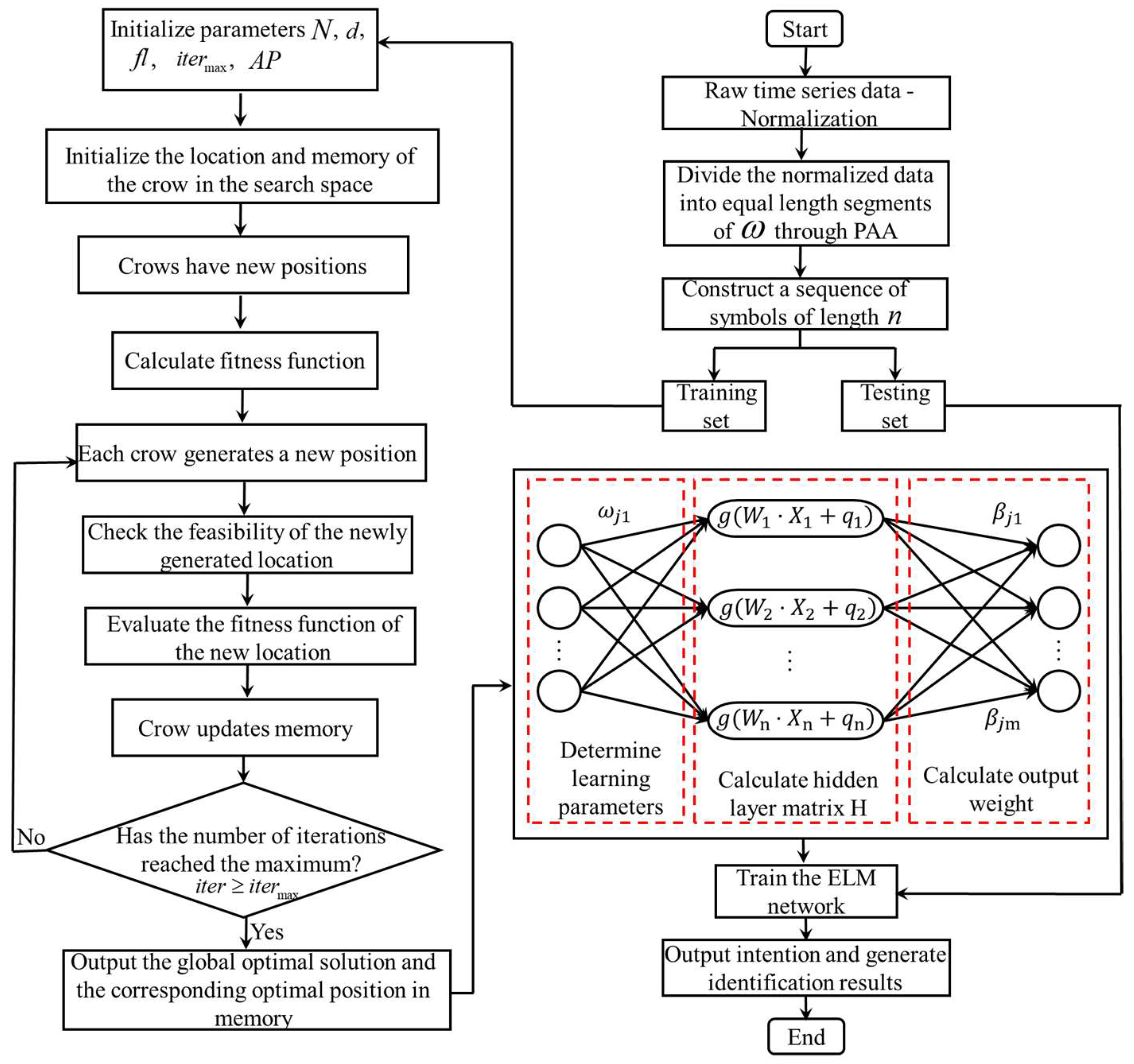
3.3. Extreme Learning Machine Optimized by the Crow Search Algorithm
- (1)
- Extreme learning machine
- (2)
- Crow search algorithm
- (3)
- ESAX-CAS-ELM model
4. Results
4.1. Feature Extraction of Intention
4.2. Classification of Intention Generation
- (1)
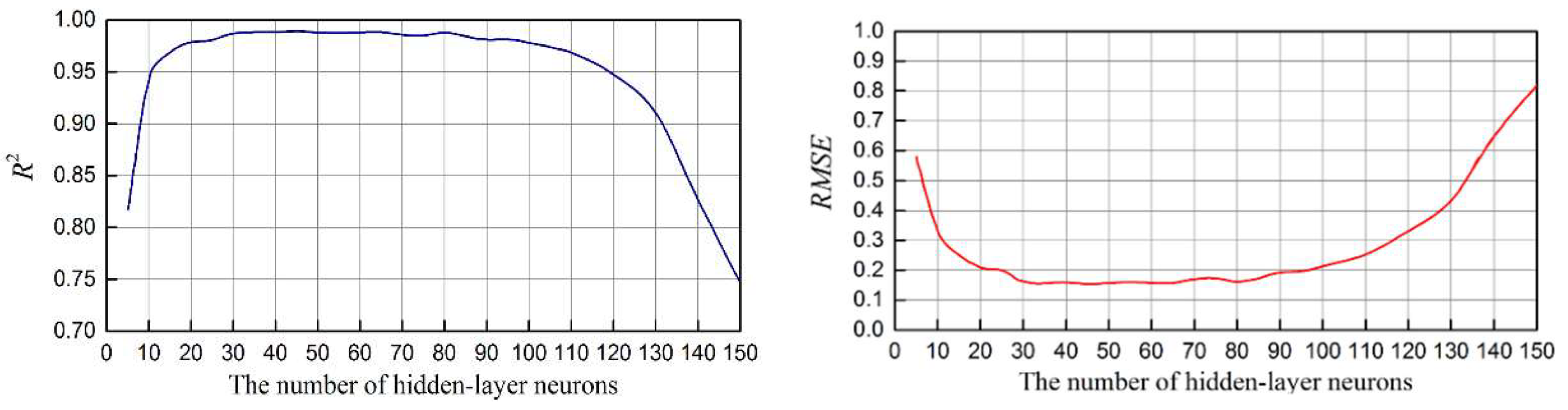
- Determination of network structure
- (2)
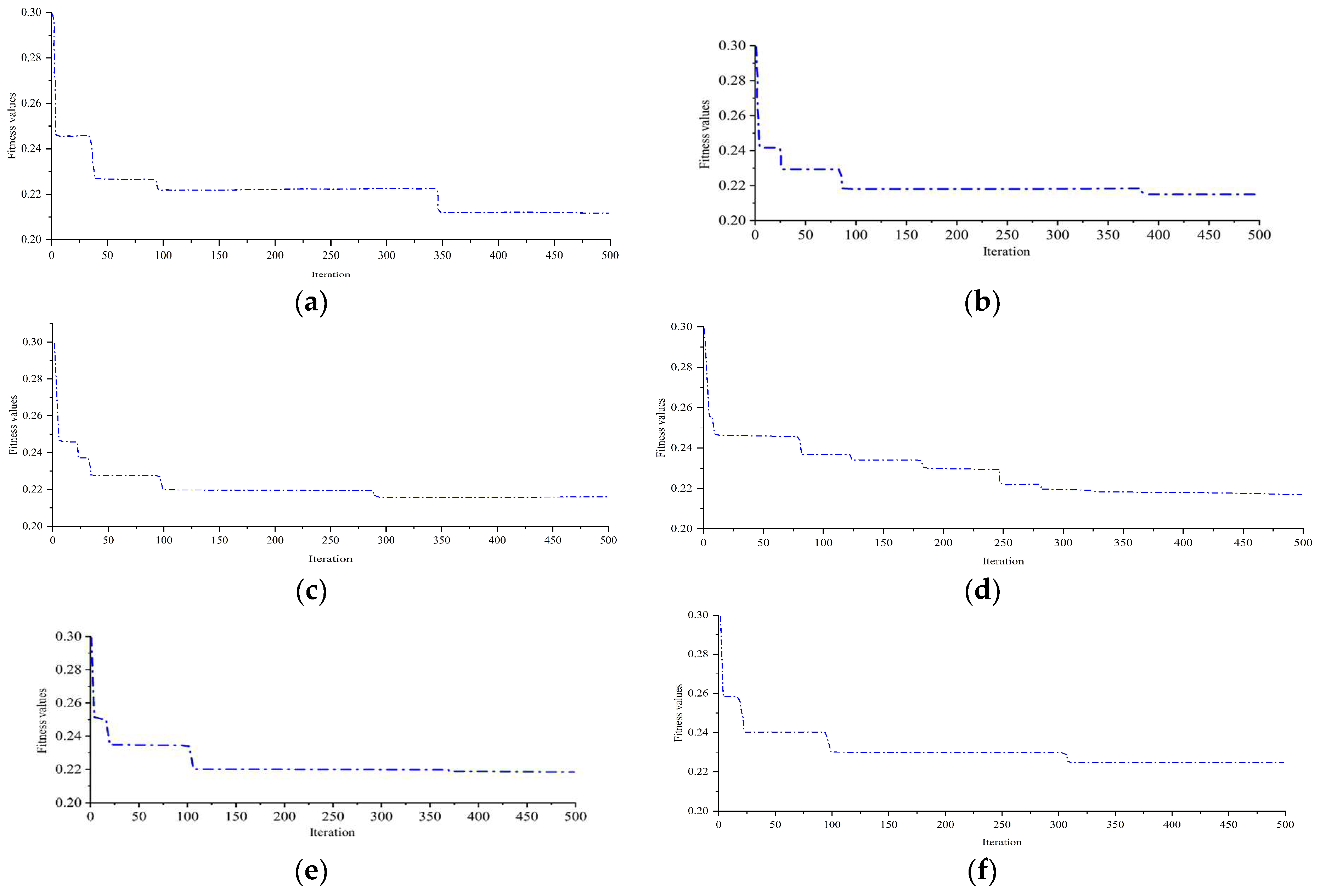
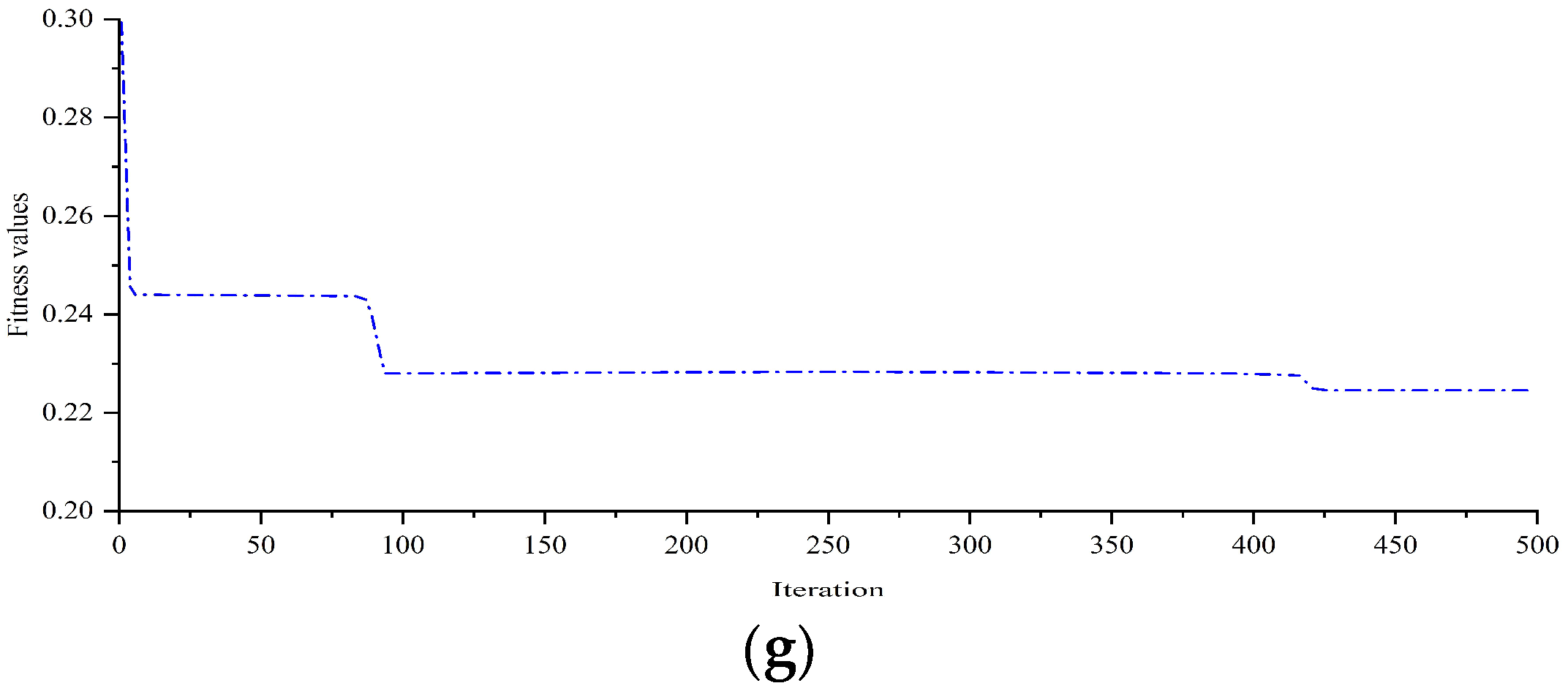
- Determination of parameters
- (3)
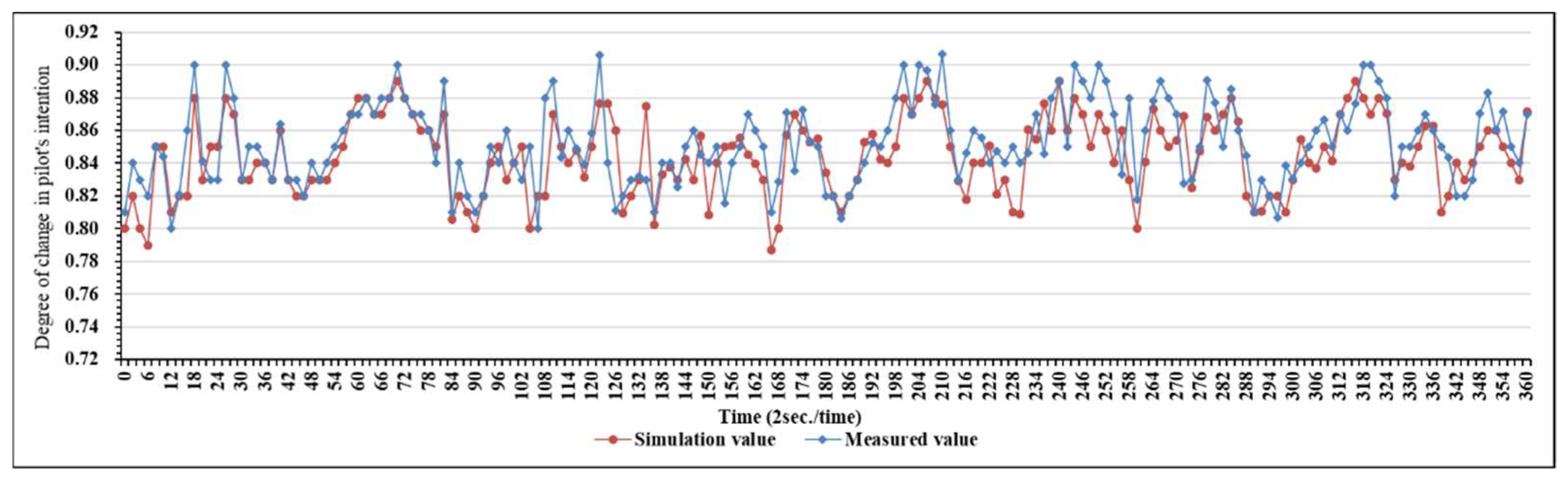
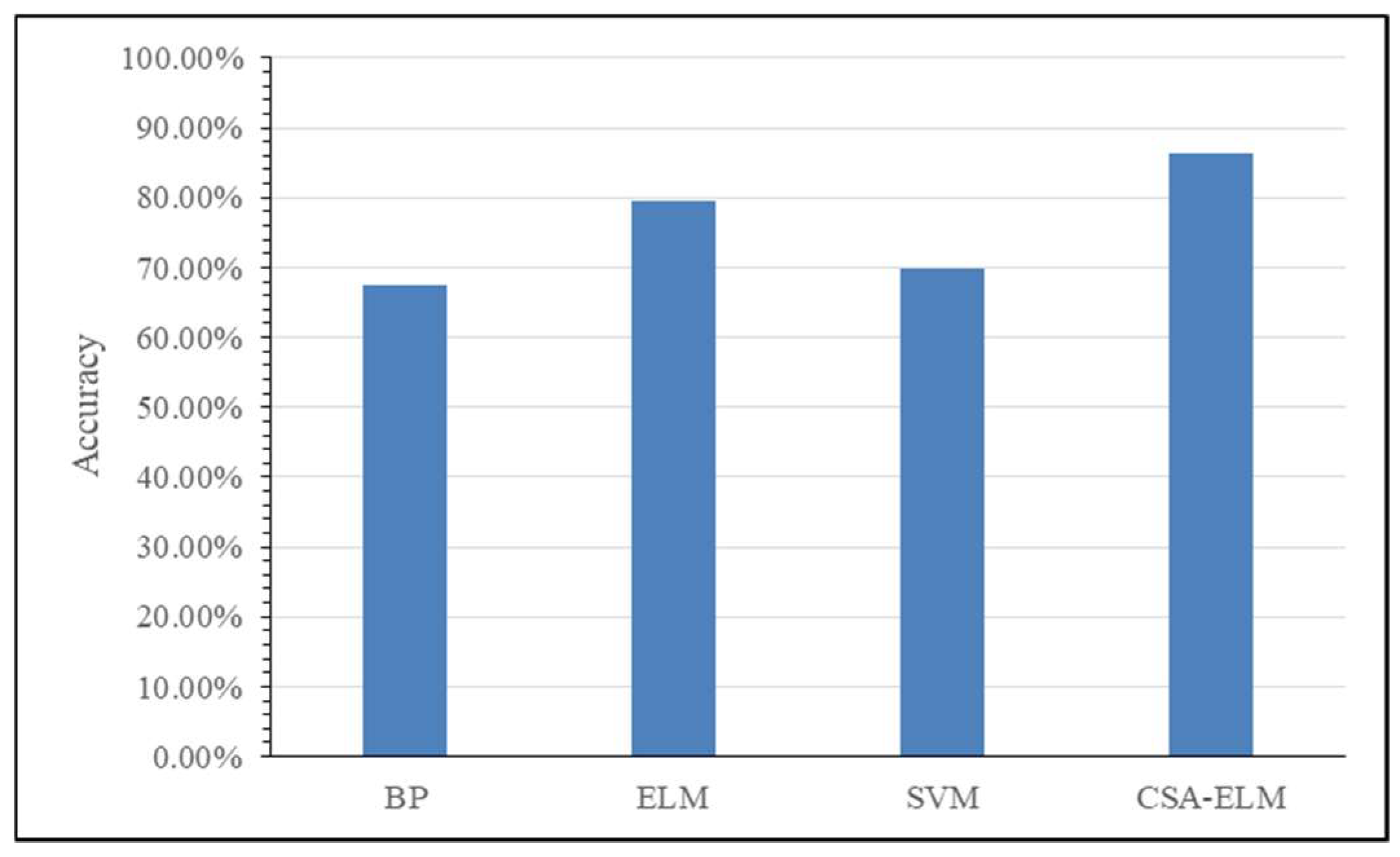
- CAS-ELM performance evaluation
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Boeing Commercial Airplanes. Statistical Summary of Commercial Jet Airplane Accidents Worldwide Operations 1959–2018; Boeing Commercial Airplanes: Seattle, WA, USA, 2019. [Google Scholar]
- Wilson, G.F. An Analysis of Mental Workload in Pilots During Flight Using Multiple Psychophysiological Measures. Int. J. Aviat. Psychol. 2002, 12, 3–18. [Google Scholar] [CrossRef]
- Schlimm, K.A. A Model for Situational Awareness in Aircraft Upset Prevention and Recovery. In Proceedings of the TX 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015; Volume 6, pp. 22–26. [Google Scholar]
- Barkhuizen, W.; Schepers, J.; Coetzee, J. Rate of information processing and reaction time of aircraft pilots and non-pilots. SA J. Ind. Psychol. 2002, 28, 67–76. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.B.; Pan, T.; Si, H.Q.; Li, Y.; Jiang, N.Q. Research on influencing factor selection of pilot’s intention. Int. J. Aerosp. Eng. 2020, 2020, 4294538. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.L. Research on Motorist’s Intention Recognition for Traffic. Ph.D. Dissertation, Wuhan University of Technology, Wuhan, China, 2011. [Google Scholar]
- Peter, J.P.; Olson, J.C.; Grunert, K.G. Consumer Behavior and Marketing Strategy; McGraw-Hill: London, UK, 1999. [Google Scholar]
- Folkes, V.S. Recent Attribution Research in Consumer Behavior: A Review and New Directions. J. Consum. Res. 1988, 14, 548–565. [Google Scholar] [CrossRef]
- Cak, S.; Say, B.; Misirlisoy, M. Effects of Working Memory, Attention, and Expertise on Pilots’ Situation Awareness. Cogn. Technol. Work. 2019, 22, 85–94. [Google Scholar] [CrossRef]
- Ji, M.; Xu, Q.; Xu, S.; Du, Q.; Li, D. Proactive personality and situational judgment among civil flying cadets: The roles of risk perception and cognitive flexibility. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 179–187. [Google Scholar] [CrossRef]
- Bazargan, M.; Guzhva, V.S. Impact of gender, age and experience of pilots on general aviation accidents. Accid. Anal. Prev. 2011, 43, 962–970. [Google Scholar] [CrossRef]
- Causse, M.; Dehais, F.; Péran, P.; Sabatini, U.; Pastor, J. The effects of emotion on pilot decision-making: A neuroergonomic approach to aviation safety. Transp. Res. Part C Emerg. Technol. 2013, 33, 272–281. [Google Scholar] [CrossRef] [Green Version]
- Albus, J. The engineering of mind. Inf. Sci. 1999, 117, 1–18. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E.; Stork, D.G. Pattern Classification; John Wiley & Sons: New York, NY, USA, 2012. [Google Scholar]
- Degani, A.; Heymann, M.; Meyer, G.; Shafto, M. Some Formal Aspects of Human Automation Interaction; NASA Technical Memorandum; NASA Ames Research: Moffett Field, CA, USA, 2000. [Google Scholar]
- Heymann, M.; Degani, A. Formal analysis and automatic generation of user interfaces: Approach, methodology, and an algorithm. Hum. Factors Ergon. Soc. 2007, 49, 311–330. [Google Scholar] [CrossRef] [Green Version]
- Oishi, M.; Tomlin, C.; Degani, A. Discrete abstractions of hybrid systems: Verification of safety and application to user interface design. Abstr. Reformul. Approx. Int. Symp. 2003, 2371, 340–341. [Google Scholar]
- Oishi, M.; Mitchell, I.; Bayen, A.M.; Tomlin, C.J. Invariance-Preserving Abstractions of Hybrid Systems: Application to User Interface Design. IEEE Trans. Control Syst. Technol. 2008, 16, 229–244. [Google Scholar] [CrossRef] [Green Version]
- Das, S.; Matthews, B.L.; Srivastava, A.N.; Oza, N.C. Multiple Kernel Learning for Heterogeneous Anomaly Detection: Algorithm and Aviation Safety Case Study. In Proceedings of the 16th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Washington, DC, USA, 24–28 July 2010; Volume 7, pp. 25–28. [Google Scholar]
- Bass, E.J.; Feigh, K.M.; Gunter, E.L.; Rushby, J.M. Formal Modeling and Analysis for Interactive Hybrid Systems. Fourth International Workshop on Formal Methods for Interactive Systems. Electron. Commun. Easst 2011, 45, 1–27. [Google Scholar]
- Wanyan, X.; Zhuang, D.; Lin, Y.; Xiao, X.; Song, J.-W. Influence of mental workload on detecting information varieties revealed by mismatch negativity during flight simulation. Int. J. Ind. Ergon. 2018, 64, 1–7. [Google Scholar] [CrossRef]
- Yang, C.; Yin, T.; Zhao, W.; Huang, D.; Fu, S. Human factors quantification via boundary identification of flight performance margin. Chin. J. Aeronaut. 2014, 27, 977–985. [Google Scholar] [CrossRef] [Green Version]
- Cai, Z.; Wu, Q.; Huang, D.; Ding, L.; Yu, B.; Law, R.; Huang, J.; Fu, S. Cognitive state recognition using wavelet singular entropy and ARMA entropy with AFPA optimized GP classification. Neurocomputing 2016, 197, 29–44. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, Y.; Qiu, Z.; Bao, J.; Zhang, Y. Adaptive Neuro-Fuzzy Fusion of Multi-Sensor Data for Monitoring a Pilot’s Workload Condition. Sensors 2019, 19, 3629. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Tan, W.; Qu, X. Modeling Human Pilot Behavior for Aircraft With a Smart Inceptor. IEEE Trans. Hum.-Mach. Syst. 2019, 49, 661–671. [Google Scholar] [CrossRef]
- Xu, S.; Tan, W.; Qu, X.; Zhang, C. Prediction of nonlinear pilot-induced oscillation using an intelligent human pilot model. Chin. J. Aeronaut. 2019, 32, 2592–2611. [Google Scholar] [CrossRef]
- Nandiganahalli, J.S.; Lee, S.; Hwang, I. Formal Verification for Mode Confusion in the Flight Deck Using Intent-Based Abstraction. J. Aerosp. Inf. Syst. 2016, 13, 343–356. [Google Scholar] [CrossRef]
- Wang, X.; Guo, Y.; Chen, C.; Xia, Y.; Liu, Y. Analysis of female drivers’ ECG characteristics within the context of connected vehicles. J. Intell. Connect. Veh. 2019, 2, 55–66. [Google Scholar] [CrossRef]
- Passos, H.D.S.; Teodoro, F.G.S.; Duru, B.M.; De Oliveira, E.L.; Peres, S.M.; Lima, C.A.M. Symbolic Representations of Time Series Applied to Biometric Recognition Based on ECG Signals. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 3199–3207. [Google Scholar]
- Du, J.; Xu, R.; Wen, Z. A Symbolic Representation Approach of EEG Signals for Emotion Recognition. In Proceedings of the International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), Shenzhen, China, 15–17 December 2017; pp. 666–671. [Google Scholar]
- Lin, J.; Keogh, E.; Lonardi, S. A Symbolic Representation of Time Series, with Implications for Streaming Algorithms. In Proceedings of the 8th ACM SIGMOD Workshop on Research Issues in Data Mining and Knowledge Discovery, San Diego, CA, USA, 13 June 2003. [Google Scholar]
- Lkhagva, B.; Suzuki, Y.; Kawagoe, K. Extended SAX: Extension of Symbolic Aggregate Approximation for Financial Time Series Data Representation. DEWS2006 4A-i8. 2006, Volume 7. Available online: https://www.researchgate.net/profile/Yu-Suzuki2/publication/229046404_Extended_SAX_extension_of_symbolic_aggregate_approximation_for_financial_time_series_data_representation/links/570b819d08ae8883a1ffa123/Extended-SAX-extension-of-symbolic-aggregate-approximation-forfinancial-time-series-data-representation.pdf (accessed on 8 May 2022).
- Lima, W.S.; Hendrio, L.; Bragança, D.S. Human activity recognition based on symbolic representation algorithms for inertial sensors. Sensors 2018, 18, 4015. [Google Scholar]
- Huang, G.-B.; Zhu, Q.-Y.; Siew, C.-K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Wang, Q.T. The Applications of Metaheuristic Algorithms in Discrete Location. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2010. [Google Scholar]
- Askarzadeh, A. A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm. Comput. Struct. 2016, 169, 1–12. [Google Scholar] [CrossRef]
- Yang, X.S. Introduction to Mathematical Optimization: From Linear Programming to Metaheuristics; Cambridge International Science Publishing Ltd.: Cambridge, UK, 2008; Volume 6. [Google Scholar]
- Utomo, C.P.; Pratiwi, P.S.; Kardiana, A.; Budi, I.; Suhartanto, H. Best-Para-Meterized Sigmoid ELM for Benign and Malignant Breast Cancer Detection. In Proceedings of the International Conference on Artificial Intelligence and Pattern Recognition, Kuala Lumpur, Malaysia, 17–19 November 2014; Volume 5, pp. 50–55. [Google Scholar]
- Abdelaziz, A.Y.; Fathy, A. A novel approach based on crow search algorithm for optimal selection of con-ductor size in radial distribution networks. Eng. Sci. Technol. Int. J. 2017, 20, 391–402. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step NO. | Pilot’s Control Process |
|---|---|
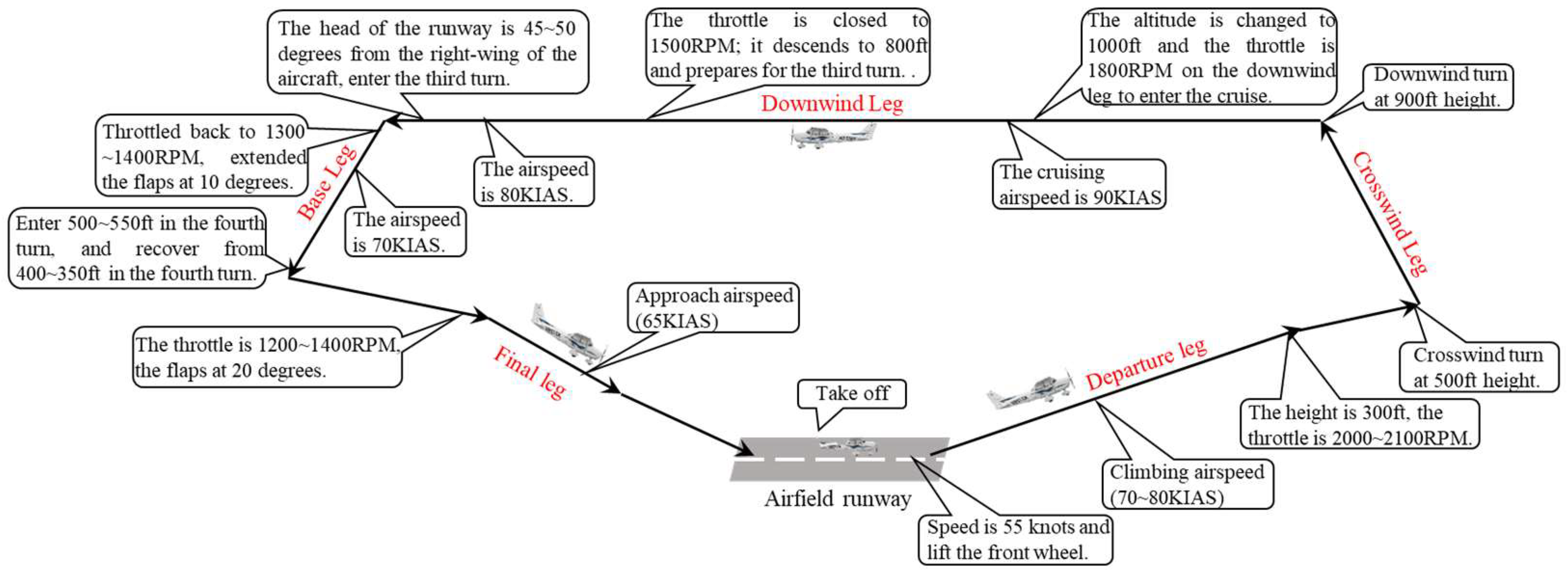
| 1 | Take-off run. |
| 2 | The speed is 55 knots and the front wheels are lifted. |
| 3 | Climbing airspeed (70~80 KIAS). |
| 4 | The height is 300 ft, the throttle is 2000~2100 RPM. |
| 5 | Crosswind turn at 500 ft height. |
| 6 | Downwind turn at 900 ft height. |
| 7 | The altitude is changed to 1000 ft and the throttle is 1800 RPM on the downwind leg to enter the cruise. The cruising airspeed is 90 KIAS. |
| 8 | When the aircraft is tangent to the head of the runway, the throttle is closed to 1500 RPM; it descends to 800 ft and prepares for the third turn with an airspeed of 80 KIAS. |
| 9 | The head of the runway is 45~50 degrees from the right-wing of the aircraft, enter the third turn. |
| 10 | The aircraft recovered from the third turn, throttled back to 1300~1400 RPM, extended the flaps at 10 degrees, and the airspeed is 70 KIAS. |
| 11 | Enter 500~550 ft in the fourth turn and recover from 400~350 ft in the fourth turn. |
| 12 | The throttle is 1200~1400 RPM, the flaps at 20 degrees. |
| 13 | Approach airspeed (65 KIAS). |
| 14 | After closing the throttle, the aircraft maintains a certain attitude, angle of pitch, and speed to taxi a certain distance, and then flattens (push the nose down and the aircraft flattens). |
| Type of Signal | Method | Notes |
|---|---|---|
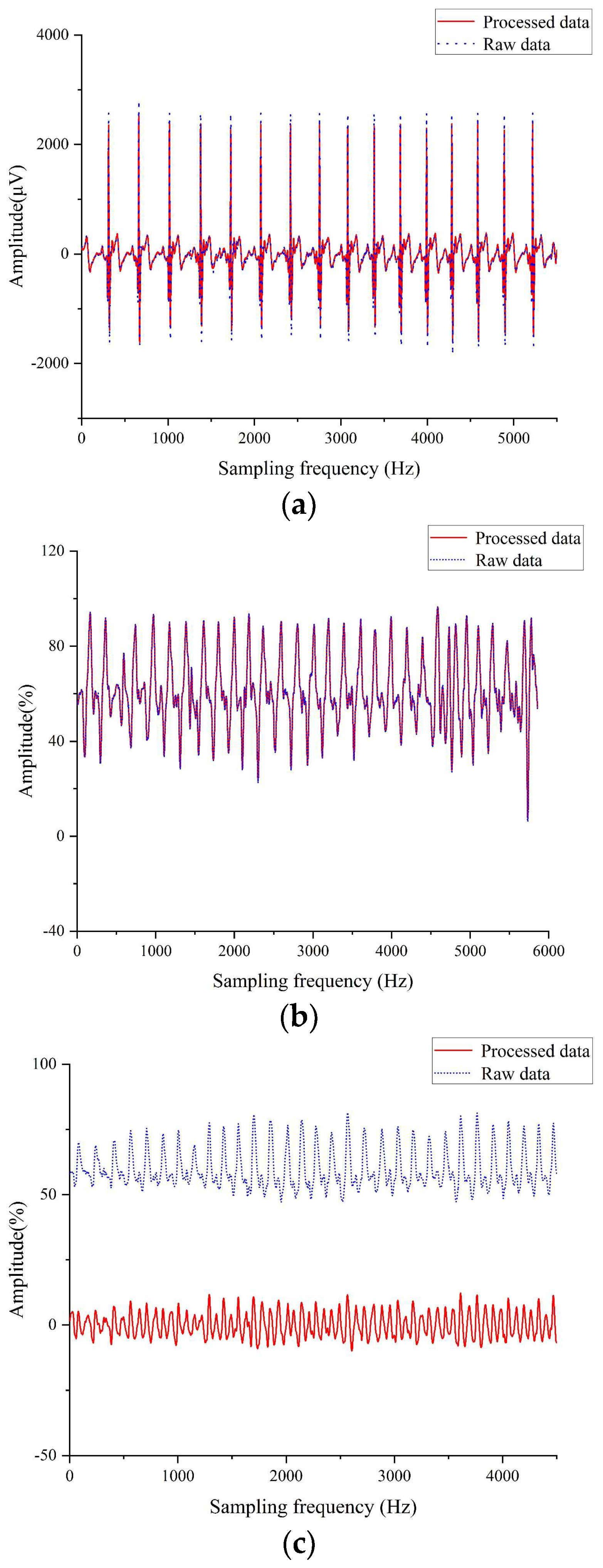
| EEG | 0.5 Hz high-pass filter | Frequencies less than 0.5 Hz are filtered. |
| 100 Hz low-pass filter magnetic induction | Frequencies greater than 100 Hz are filtered. | |
| EDA | 0.3 Hz high-pass filter | Frequencies less than 0.3 Hz are filtered. |
| RESP | 100 Hz low-pass filter | Frequencies greater than 100 Hz are filtered |
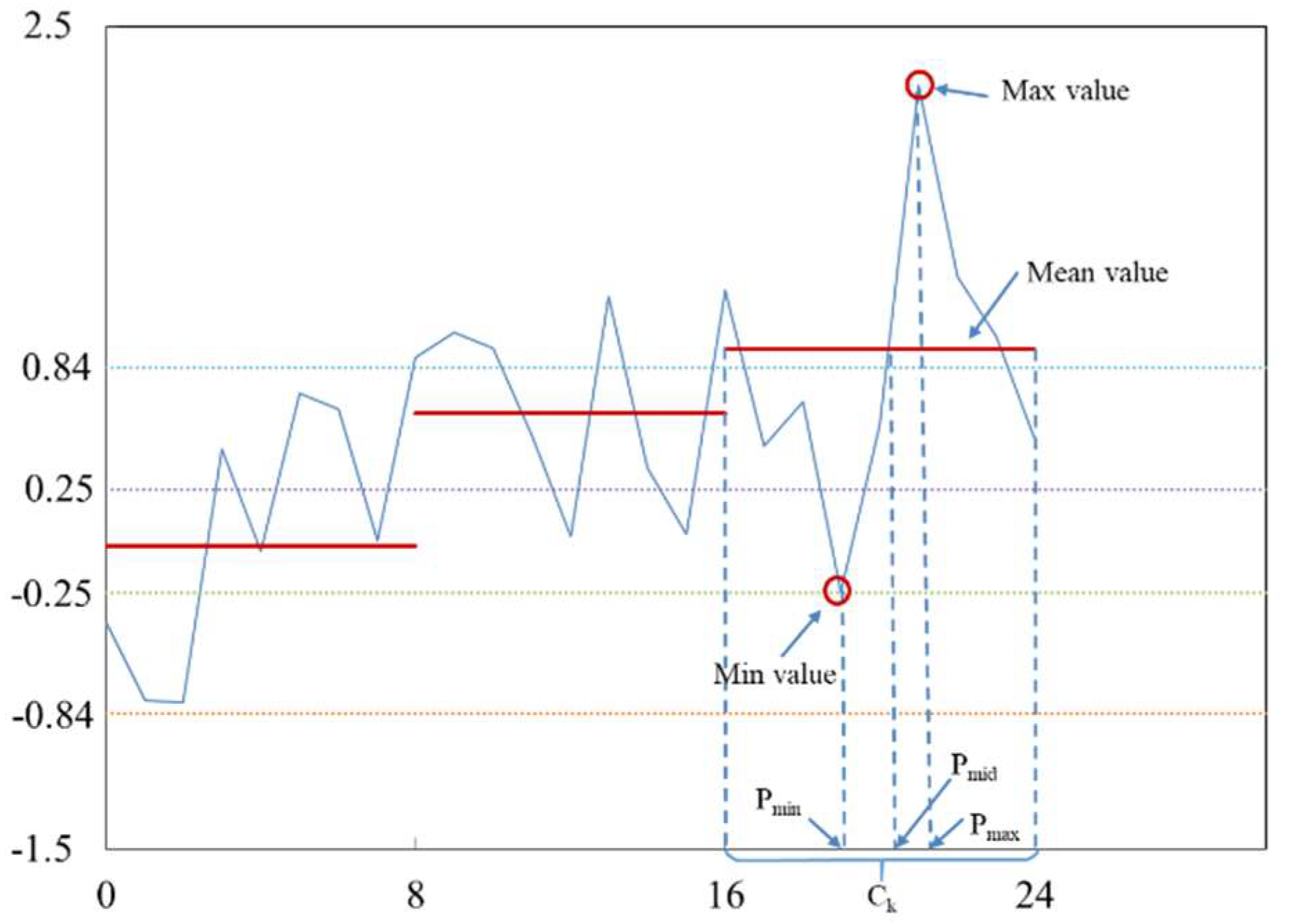
| 3 | 4 | 5 | ||
|---|---|---|---|---|
| −0.43 | −0.67 | −0.84 | ||
| 0.43 | 0 | −0.25 | ||
| 0.67 | 0.25 | |||
| 0.84 | ||||
| Performance Metrics | Formula |
|---|---|
| Precision rate | |
| Recall rate | |
| Accuracy rate |
| Performance Metrics | Training Set | Testing Set |
|---|---|---|
| Precision rate | 0.8256 | 0.8226 |
| Recall rate | 0.8341 | 0.8422 |
| Accuracy rate | 0.8673 | 0.8452 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Pan, T.; Si, H.; Zhang, H.; Shang, L.; Liu, H. Time-Varying Pilot’s Intention Identification Based on ESAX-CSA-ELM Classification Method in Complex Environment. Appl. Sci. 2022, 12, 4858. https://doi.org/10.3390/app12104858
Wang H, Pan T, Si H, Zhang H, Shang L, Liu H. Time-Varying Pilot’s Intention Identification Based on ESAX-CSA-ELM Classification Method in Complex Environment. Applied Sciences. 2022; 12(10):4858. https://doi.org/10.3390/app12104858
Chicago/Turabian StyleWang, Haibo, Ting Pan, Haiqing Si, Hongjia Zhang, Lei Shang, and Haibo Liu. 2022. "Time-Varying Pilot’s Intention Identification Based on ESAX-CSA-ELM Classification Method in Complex Environment" Applied Sciences 12, no. 10: 4858. https://doi.org/10.3390/app12104858