
Effect of Material Properties on Fiber-Shaped Pneumatic Actuators Performance
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
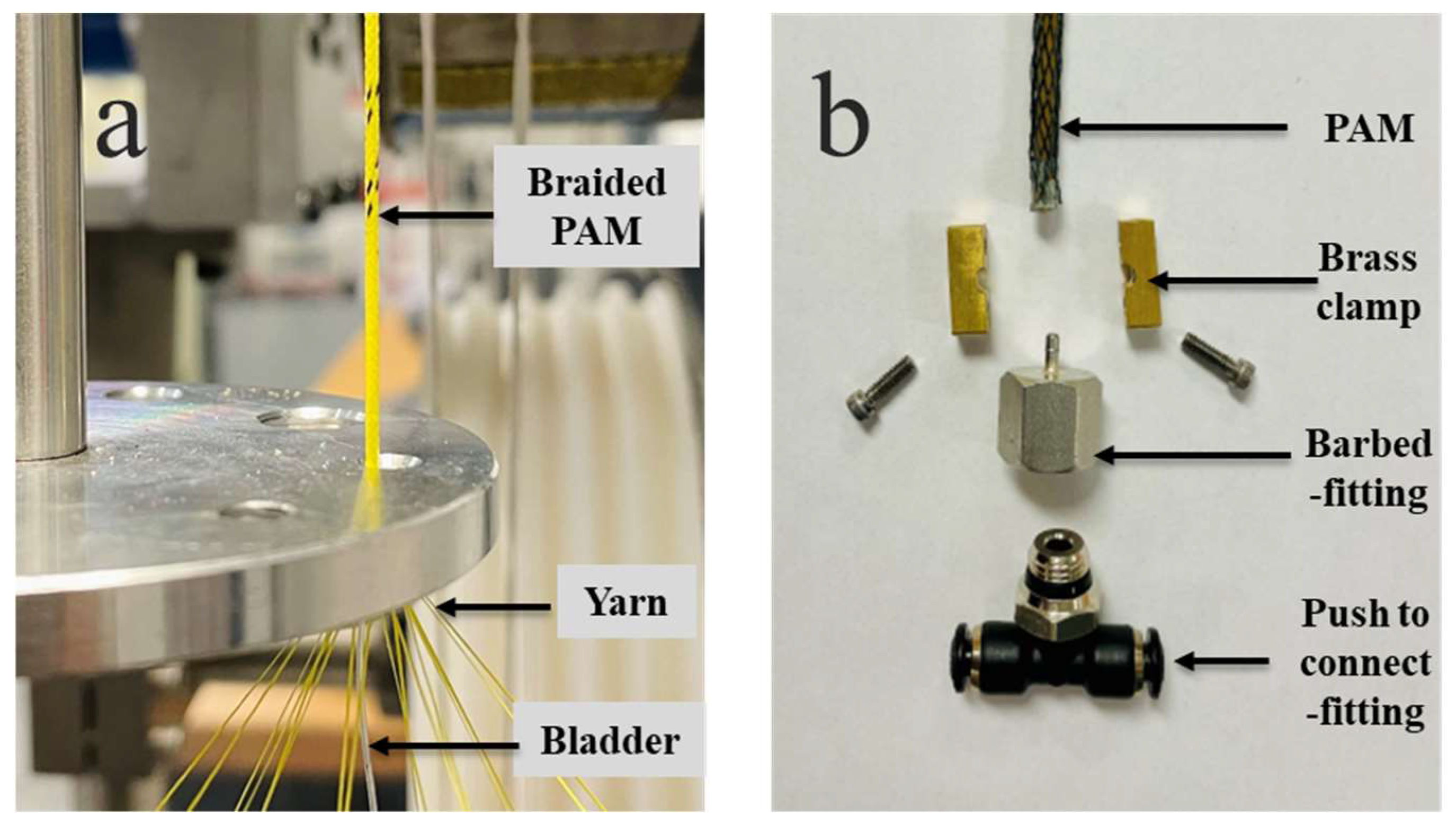
2.2. Fabrication of PAM
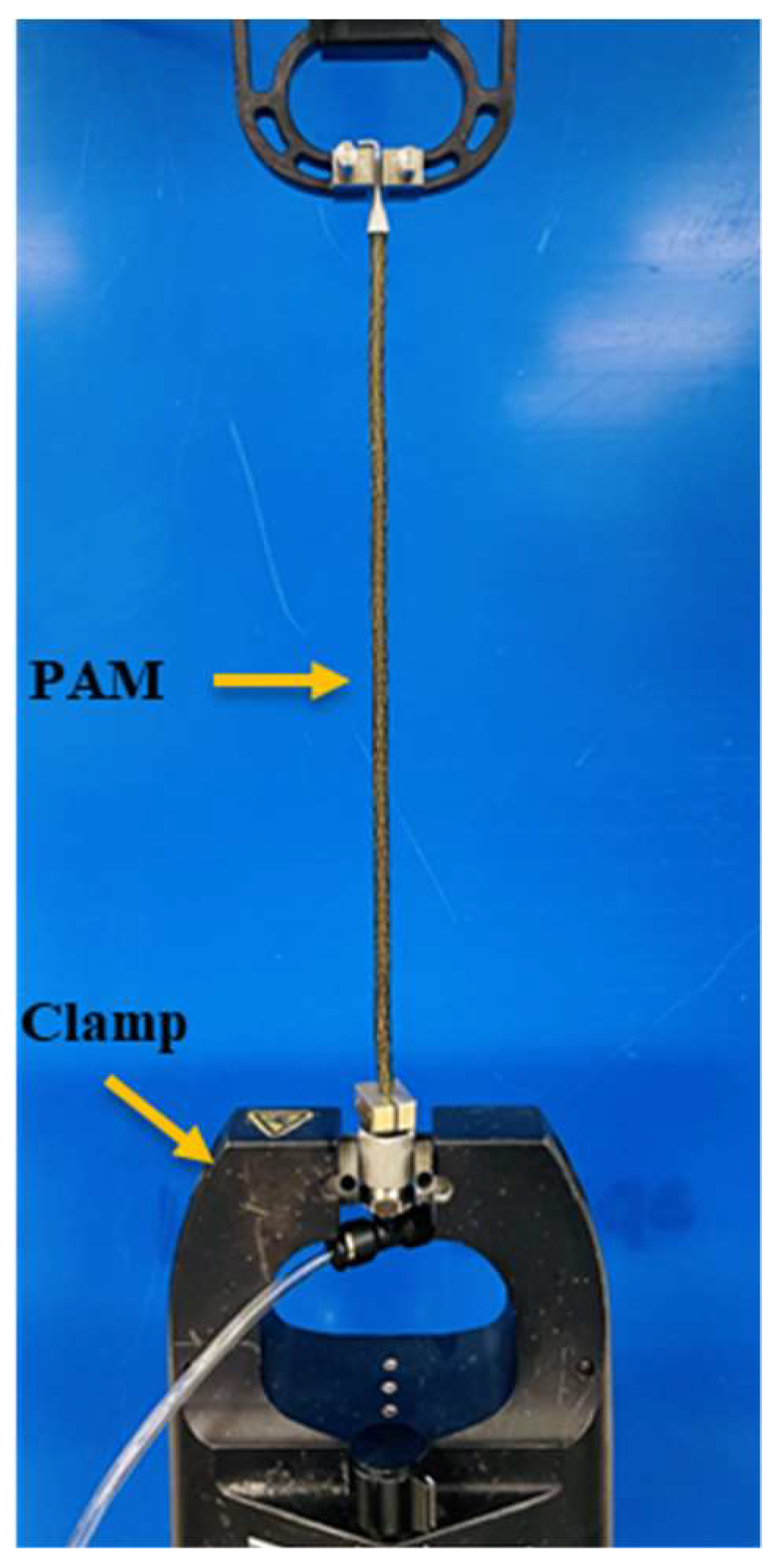
2.3. Characterization of the PAMs
3. Results and Discussions
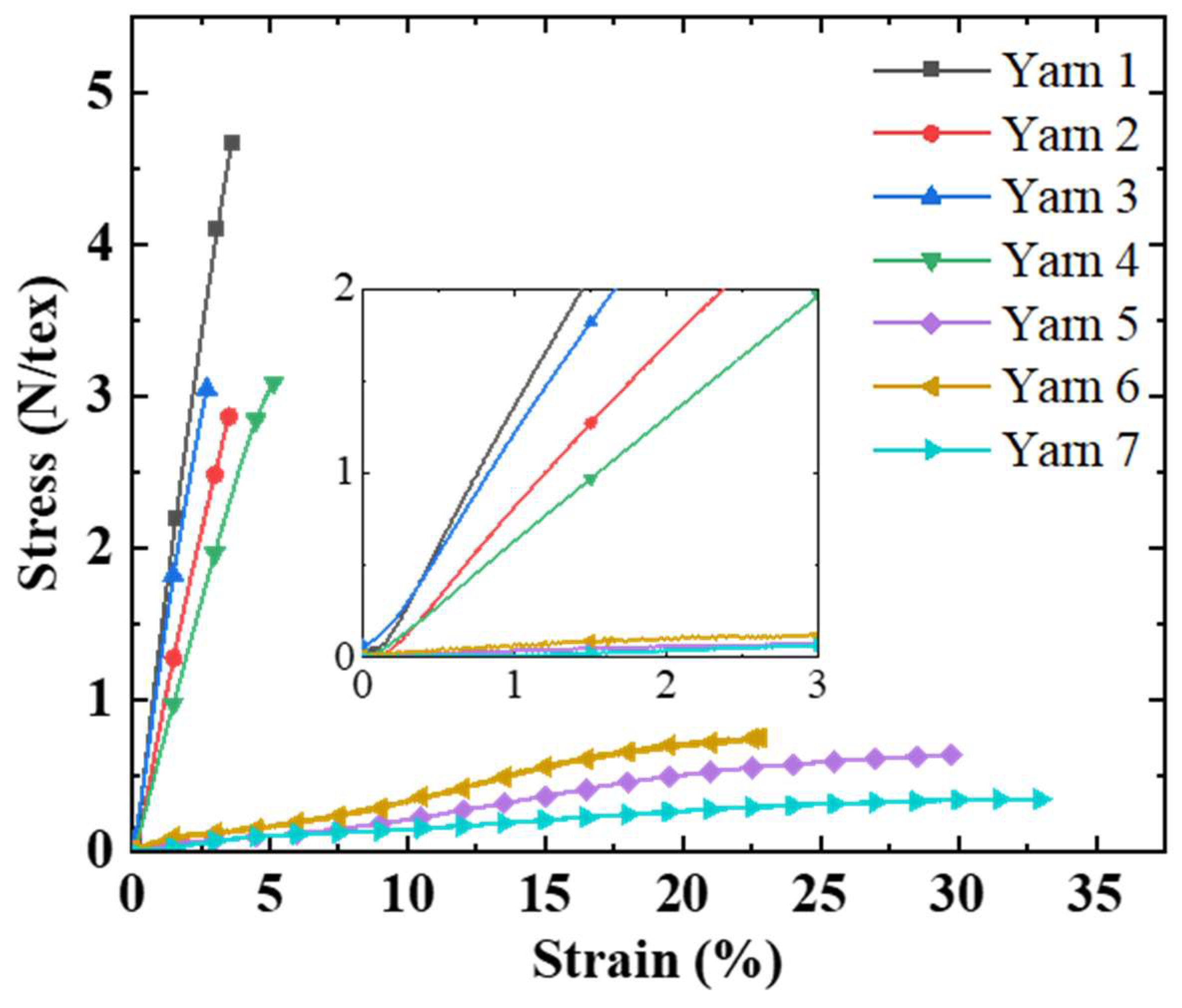
3.1. Effect of Yarn Stiffness
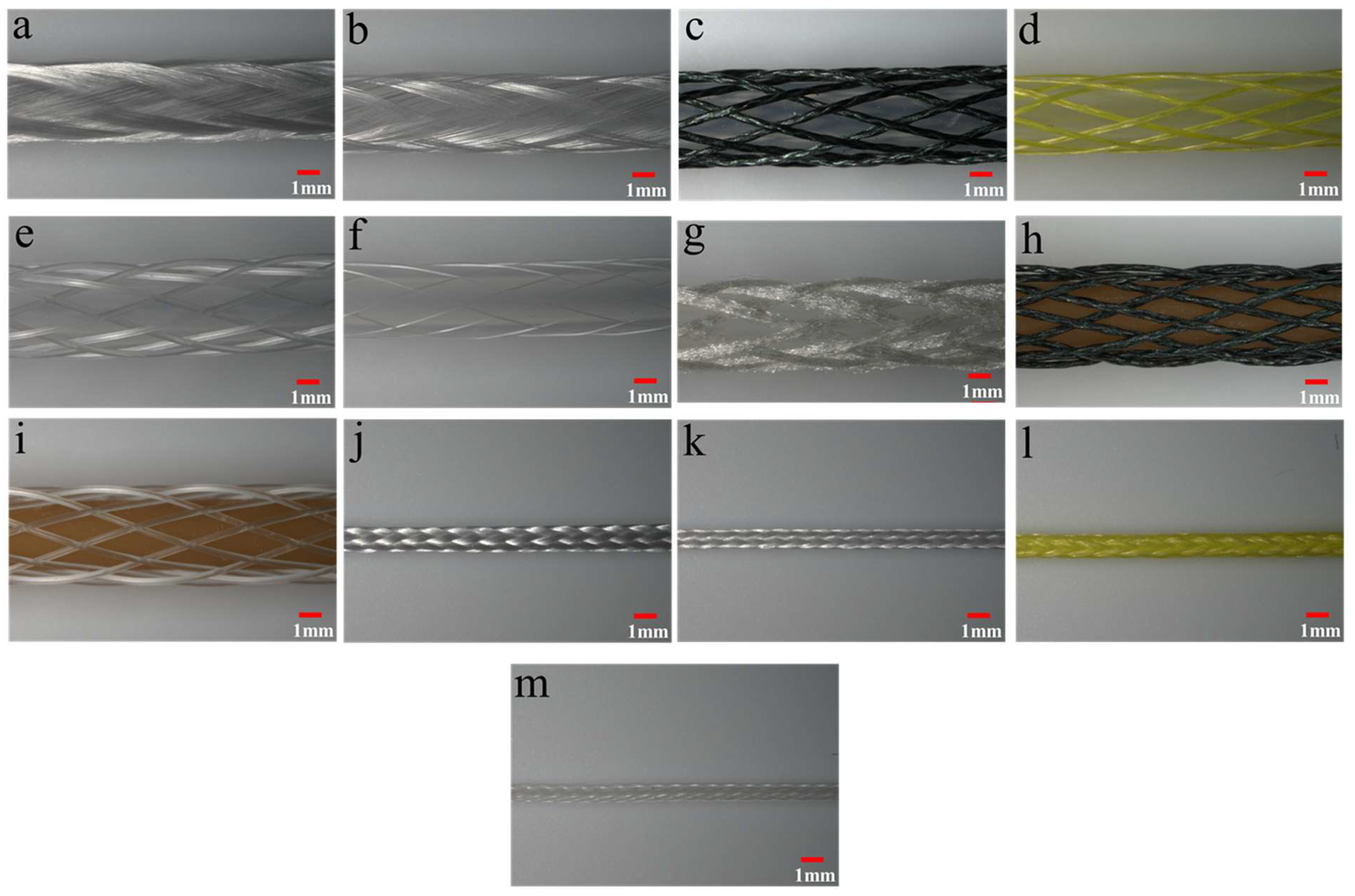
3.2. Effect of Yarn Diameter and Structure
3.3. Effect of Tube Hardness
3.4. Effect of Bladder Size
4. Conclusions
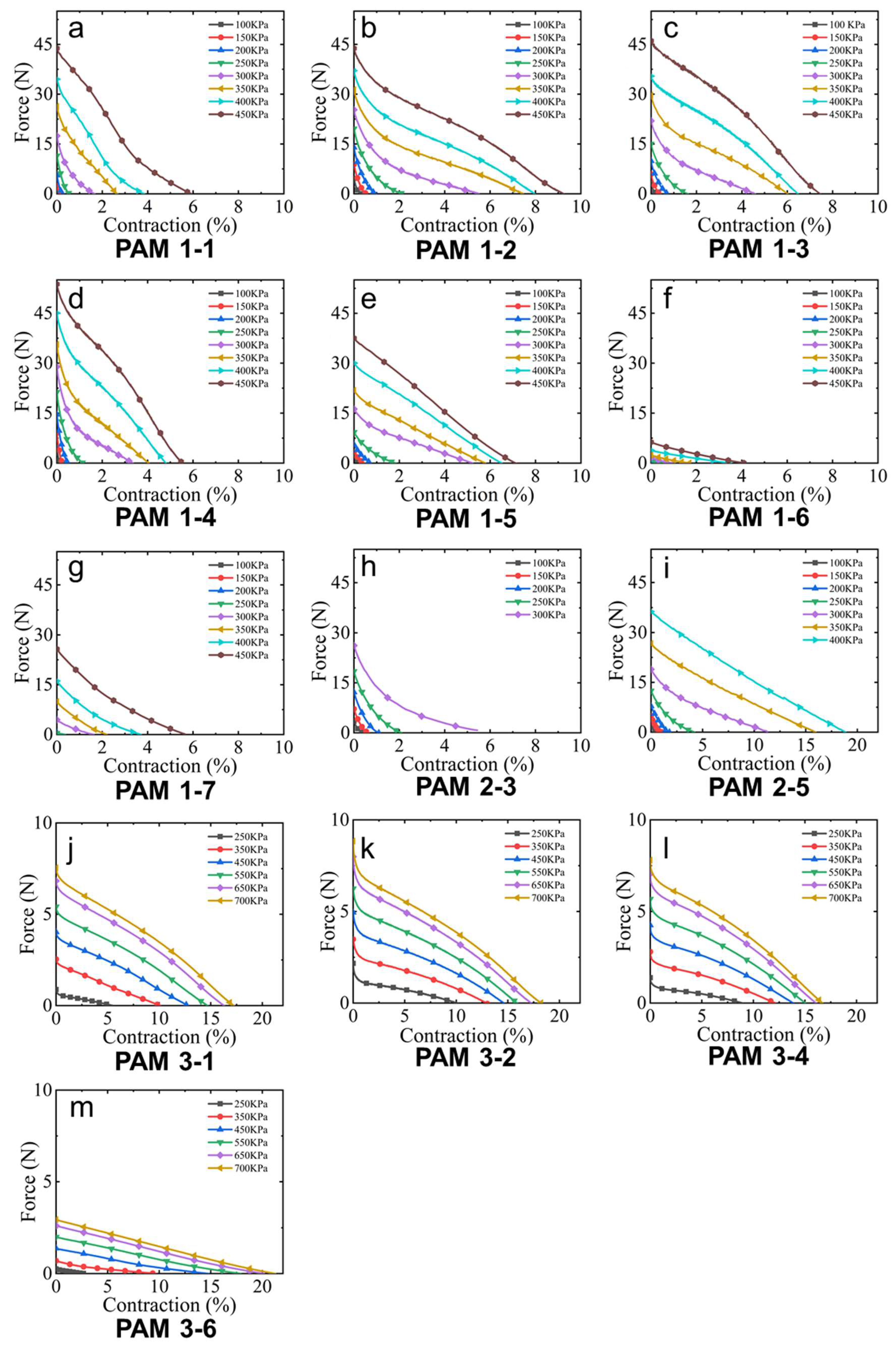
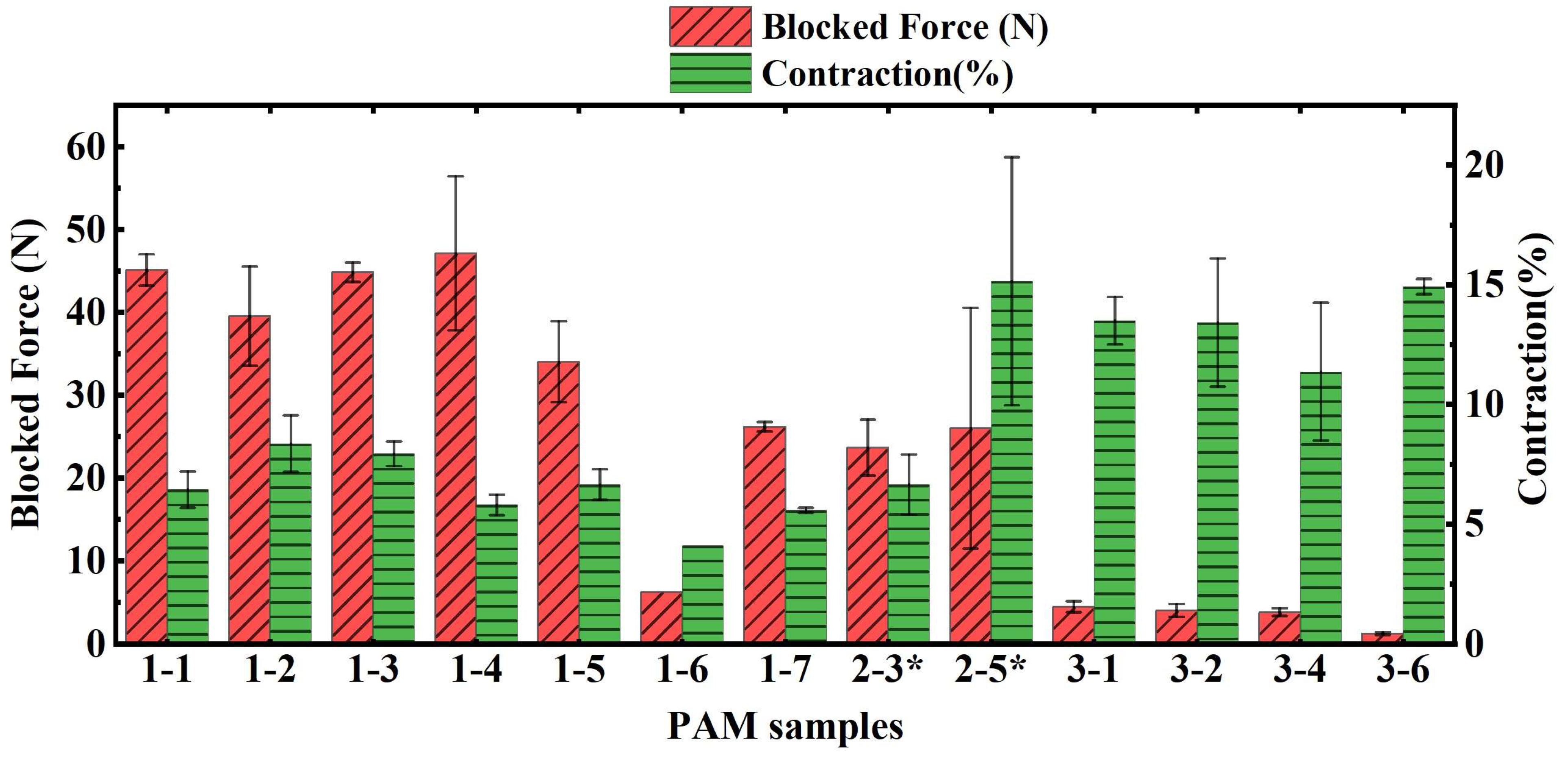
- The stiffness of the yarn is in direct proportion to PAM’s blocking force. However, it does not have a significant effect on the free contraction of the actuator. Once the yarn stiffness is beyond a certain amplitude, its influence becomes non-significant.
- Yarn diameter decides its affordable force. Small yarn dimension tends to result in a reduced PAM blocking force. Again, when the yarn’s diameter is large enough and its stiffness is very high, the influence of yarn size is negligible.
- The yarn structure slightly affects the free contraction ratio of the actuator.
- Regarding the bladder’s properties, its hardness has an exceeding influence on PAM’s performance. Although the softer bladder is able to generate a higher free contraction of PAM, it can easily bulge out through the braiding sleeve and cause destructive failure. In addition, it is evident that a larger bladder generates significantly higher blocking force but a low free-contraction ratio.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Klute, G.K.; Czerniecki, J.M.; Hannaford, B. McKibben Artificial Muscles: Pneumatic Actuators with Biomechanical Intelligence. In Proceedings of the 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (Cat. No.99TH8399), Atlanta, GA, USA, 19–23 September 1999; pp. 221–226. [Google Scholar]
- Chou, C.-P.; Hannaford, B. Static and Dynamic Characteristics of McKibben Pneumatic Artificial Muscles. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; Volume 1, pp. 281–286. [Google Scholar]
- Liu, C.; Wang, Y.; Qian, Z.; Wang, K.; Zhao, F.; Ding, P.; Xu, D.; Wei, G.; Ren, L.; Ren, L. Bioinspired Actuators with Intrinsic Muscle-like Mechanical Properties. iScience 2021, 24, 103023. [Google Scholar] [CrossRef]
- Kurumaya, S.; Suzumori, K.; Nabae, H.; Wakimoto, S. Musculoskeletal Lower-Limb Robot Driven by Multifilament Muscles. Robomech J. 2016, 3, 18. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhang, Y.; Fu, X.; Xiang, G. Design and Kinematic Analysis of a Novel Humanoid Robot Eye Using Pneumatic Artificial Muscles. J. Bionic Eng. 2008, 5, 264–270. [Google Scholar] [CrossRef]
- Daerden, F.; Lefeber, D.; Verrelst, B.; Van Ham, R. Pleated Pneumatic Artificial Muscles: Actuators for Automation and Robotics. In Proceedings of the 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Proceedings (Cat. No.01TH8556), Como, Italy, 8–12 July 2001; Volume 2, pp. 738–743. [Google Scholar]
- Zaghloul, A.; Bone, G.M. Origami-Inspired Soft Pneumatic Actuators: Generalization and Design Optimization. Actuators 2023, 12, 72. [Google Scholar] [CrossRef]
- Gregov, G.; Ploh, T.; Kamenar, E. Design, Development and Experimental Assessment of a Cost-Effective Bellow Pneumatic Actuator. Actuators 2022, 11, 170. [Google Scholar] [CrossRef]
- Ricotti, L.; Trimmer, B.; Feinberg, A.W.; Raman, R.; Parker, K.K.; Bashir, R.; Sitti, M.; Martel, S.; Dario, P.; Menciassi, A. Biohybrid Actuators for Robotics: A Review of Devices Actuated by Living Cells. Sci. Robot. 2017, 2, eaaq0495. [Google Scholar] [CrossRef] [Green Version]
- Ashwin, K.P.; Ghosal, A. A Survey on Static Modeling of Miniaturized Pneumatic Artificial Muscles With New Model and Experimental Results. Appl. Mech. Rev. 2018, 70, 040802. [Google Scholar] [CrossRef]
- Chen, B.; Zi, B.; Wang, Z.; Qin, L.; Liao, W.-H. Knee Exoskeletons for Gait Rehabilitation and Human Performance Augmentation: A State-of-the-Art. Mech. Mach. Theory 2019, 134, 499–511. [Google Scholar] [CrossRef]
- Abe, T.; Koizumi, S.; Nabae, H.; Endo, G.; Suzumori, K.; Sato, N.; Adachi, M.; Takamizawa, F. Fabrication of “18 Weave” Muscles and Their Application to Soft Power Support Suit for Upper Limbs Using Thin McKibben Muscle. IEEE Robot. Autom. Lett. 2019, 4, 2532–2538. [Google Scholar] [CrossRef]
- Hiramitsu, T.; Suzumori, K.; Nabae, H.; Endo, G. Experimental Evaluation of Textile Mechanisms Made of Artificial Muscles. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 1–6. [Google Scholar]
- Gorissen, B.; Reynaerts, D.; Konishi, S.; Yoshida, K.; Kim, J.-W.; De Volder, M. Elastic Inflatable Actuators for Soft Robotic Applications. Adv. Mater. 2017, 29, 1604977. [Google Scholar] [CrossRef] [PubMed]
- Kilic Afsar, O.; Shtarbanov, A.; Mor, H.; Nakagaki, K.; Forman, J.; Modrei, K.; Jeong, S.H.; Hjort, K.; Höök, K.; Ishii, H. OmniFiber: Integrated Fluidic Fiber Actuators for Weaving Movement Based Interactions into the ‘Fabric of Everyday Life. In Proceedings of the 34th Annual ACM Symposium on User Interface Software and Technology, Virtual, 10–14 October 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 1010–1026. [Google Scholar]
- Vocke, R.D.; Kothera, C.S.; Chaudhuri, A.; Woods, B.K.S.; Wereley, N.M. Design and Testing of a High-Specific Work Actuator Using Miniature Pneumatic Artificial Muscles. J. Intell. Mater. Syst. Struct. 2012, 23, 365–378. [Google Scholar] [CrossRef]
- Tondu, B. Modelling of the McKibben Artificial Muscle: A Review. J. Intell. Mater. Syst. Struct. 2012, 23, 225–253. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Zhang, W. Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices. Sci. Rep. 2020, 10, 9638. [Google Scholar] [CrossRef]
- Kurumaya, S.; Nabae, H.; Endo, G.; Suzumori, K. Active Textile Braided in Three Strands with Thin McKibben Muscle. Soft Robot. 2019, 6, 250–262. [Google Scholar] [CrossRef]
- Connolly, F.; Walsh, C.J.; Bertoldi, K. Automatic Design of Fiber-Reinforced Soft Actuators for Trajectory Matching. Proc. Natl. Acad. Sci. USA 2017, 114, 51–56. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hocking, E.G.; Wereley, N.M. Analysis of Nonlinear Elastic Behavior in Miniature Pneumatic Artificial Muscles. Smart Mater. Struct. 2013, 22, 014016. [Google Scholar] [CrossRef]
- Gaylord, R.H. Fluid Actuated Motor System and Stroking Device. U.S. Patent No. 2,844,126, 22 July 1958. [Google Scholar]
- Schulte, H.F. The Characteristics of the McKibben Artificial Muscle. In The Application of External Power in Prosthetics and Orthotics; National Academy of Sciences-National Research Council: Washington, DC, USA, 1961; Volume Appendix H, pp. 94–115. [Google Scholar]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Novel Considerations on Static Force Modeling of Pneumatic Muscle Actuators. IEEE/ASME Trans. Mechatron. 2016, 21, 2647–2659. [Google Scholar] [CrossRef]
- Chen, D.H.; Ushijima, K. Prediction of the Mechanical Performance of McKibben Artificial Muscle Actuator. Int. J. Mech. Sci. 2014, 78, 183–192. [Google Scholar] [CrossRef]
- Wang, G.; Wereley, N.M.; Pillsbury, T. Non-Linear Quasi-Static Model of Pneumatic Artificial Muscle Actuators. J. Intell. Mater. Syst. Struct. 2015, 26, 541–553. [Google Scholar] [CrossRef]
- Kurumaya, S.; Nabae, H.; Endo, G.; Suzumori, K. Design of Thin McKibben Muscle and Multifilament Structure. Sens. Actuators A Phys. 2017, 261, 66–74. [Google Scholar] [CrossRef]
- Pillsbury, T.E.; Kothera, C.S.; Wereley, N.M. Effect of Bladder Wall Thickness on Miniature Pneumatic Artificial Muscle Performance. Bioinspiration Biomim. 2015, 10, 055006. [Google Scholar] [CrossRef] [PubMed]
- Ball, E.; Lin, Y.; Garcia, E. Characterization and Modeling of Geometric Variations in McKibben Pneumatic Artificial Muscles. In Bioinspiration, Biomimetics, and Bioreplication; SPIE: Bellingham, WA, USA, 2013; Volume 8686, p. 868605. [Google Scholar]
- Kothera, C.S.; Jangid, M.; Sirohi, J.; Wereley, N.M. Experimental Characterization and Static Modeling of McKibben Actuators. J. Mech. Des. 2009, 131, 091010. [Google Scholar] [CrossRef]
- Plagge, J.; Klüppel, M. Mullins Effect Revisited: Relaxation, Recovery and High-Strain Damage. Mater. Today Commun. 2019, 20, 100588. [Google Scholar] [CrossRef]
- Meller, M.A.; Bryant, M.; Garcia, E. Reconsidering the McKibben Muscle: Energetics, Operating Fluid, and Bladder Material. J. Intell. Mater. Syst. Struct. 2014, 25, 2276–2293. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Christensen, D.L.; Okamura, A.M. Design and Implementation of a 300% Strain Soft Artificial Muscle. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4022–4029. [Google Scholar]
- Solano, B.; Rotinat-Libersa, C. Compact and Lightweight Hydraulic Actuation System for High Performance Millimeter Scale Robotic Applications: Modeling and Experiments. J. Intell. Mater. Syst. Struct. 2011, 22, 1479–1487. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Yarn No. | Materials | Diameter (mm) | Modulus (N/tex) | Elongation at Break (%) | Yarn Type |
|---|---|---|---|---|---|
| 1 | Dyneema | 0.17 | 81.9 | 3.6 | Multifilament |
| 2 | Dyneema | 0.08 | 136.4 | 2.5 | Multifilament |
| 3 | Spectra | 0.32 | 63.3 | 2.7 | Braided |
| 4 | Spectra | 0.10 | 122.0 | 5.1 | Braided |
| 5 | Nylon | 0.31 | 3.6 | 29.7 | Monofilament |
| 6 | Nylon | 0.08 | 6.7 | 22.8 | Monofilament |
| 7 | Polyester | 0.17 | 1.1 | 33.0 | Multifilament |
| No. | Materials | Outer Diameter (mm) | Inner Diameter (mm) | Bladder Volume (Vb)/Internal Volume (V0) | Ratio between Wall Thickness and OD | Hardness (Durometer A) |
|---|---|---|---|---|---|---|
| 1 | Silicone | 3.17 | 1.60 | 1.98 | 0.25 | 53 A |
| 2 | Natural Rubber | 3.17 | 1.60 | 1.98 | 0.25 | 35 A |
| 3 | Silicone | 0.50 | 0.28 | 1.78 | 0.22 | 50 A |
| Actuator Samples | Yarn Modulus (N/tex) | Yarn Diameter (mm) | Bladder OD (mm) | Bladder Hardness (Durometer A) | Braiding Angle (°) | Number of Braiding Yarns in the Sleeve |
|---|---|---|---|---|---|---|
| PAM 1-1 | 81.9 | 0.17 | 3.17 | 53 A | 20 | 16 |
| PAM 1-2 | 136.4 | 0.08 | ||||
| PAM 1-3 | 63.3 | 0.32 | ||||
| PAM 1-4 | 122.0 | 0.10 | ||||
| PAM 1-5 | 3.6 | 0.31 | ||||
| PAM 1-6 | 6.7 | 0.08 | ||||
| PAM 1-7 | 1.1 | 0.17 | ||||
| PAM 2-3 | 63.3 | 0.32 | 35 A | |||
| PAM 2-5 | 3.6 | 0.31 | ||||
| PAM 3-1 | 81.9 | 0.17 | 0.5 | 50 A | ||
| PAM 3-2 | 136.4 | 0.08 | ||||
| PAM 3-4 | 122.0 | 0.10 | ||||
| PAM 3-6 | 6.7 | 0.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoque, M.A.; Petersen, E.; Fang, X. Effect of Material Properties on Fiber-Shaped Pneumatic Actuators Performance. Actuators 2023, 12, 129. https://doi.org/10.3390/act12030129
Hoque MA, Petersen E, Fang X. Effect of Material Properties on Fiber-Shaped Pneumatic Actuators Performance. Actuators. 2023; 12(3):129. https://doi.org/10.3390/act12030129
Chicago/Turabian StyleHoque, Muh Amdadul, Emily Petersen, and Xiaomeng Fang. 2023. "Effect of Material Properties on Fiber-Shaped Pneumatic Actuators Performance" Actuators 12, no. 3: 129. https://doi.org/10.3390/act12030129