3.1. Starting Demand Identification
Accurate recognition of the driver’s intentions is important for the development of DCT control strategies [
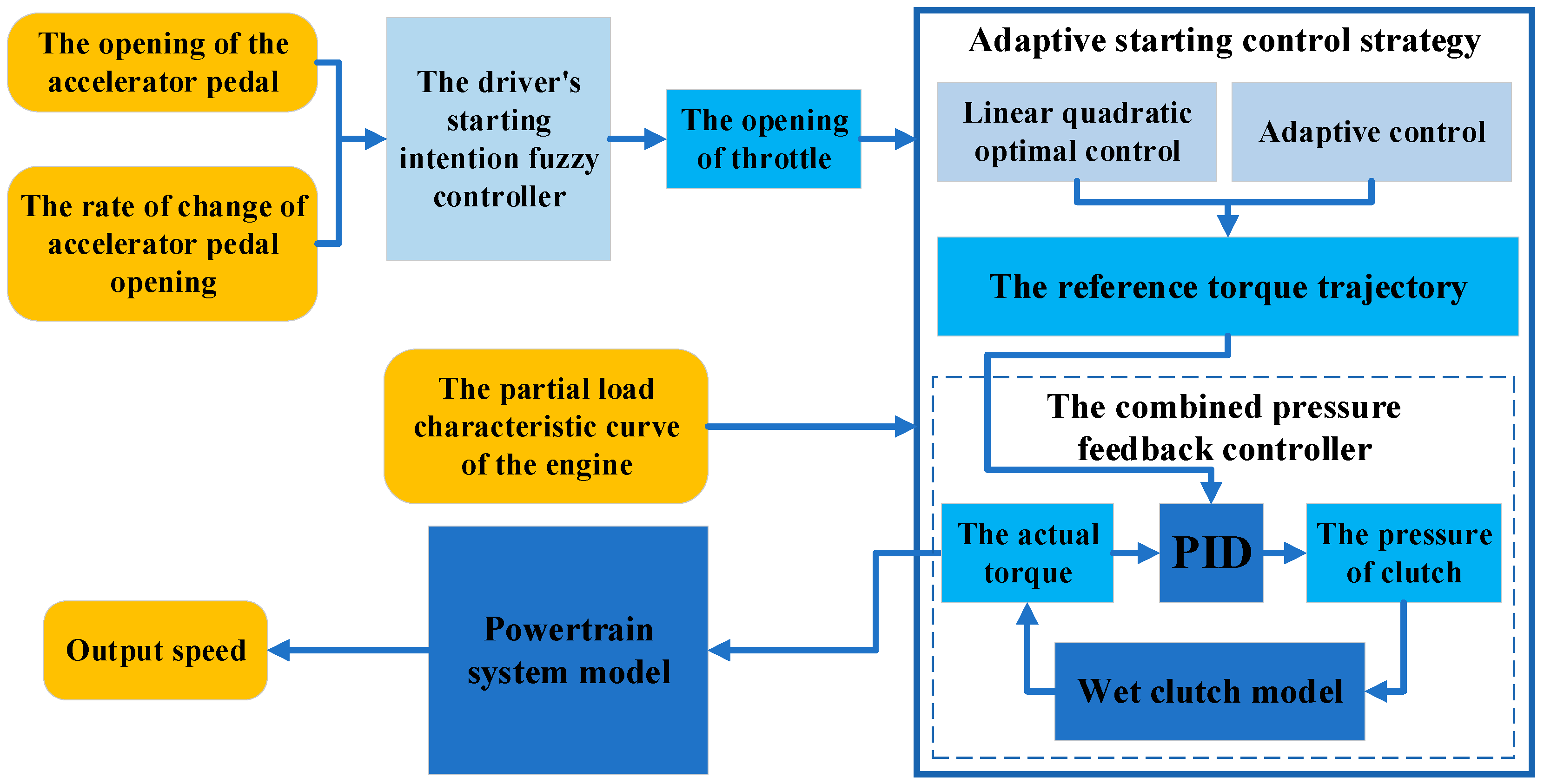
39]. One of the keys to dual-clutch starting is identifying the driver’s starting intention in a short time and controlling the clutch oil pressure to respond. The traditional driver models using PID control cannot identify the driving intention, which is difficult to meet the requirements because the accurate driver prediction model has a very obvious impact on the starting quality. Now, many studies use fuzzy control strategies to identify the starting intentions, which are accurate and respond quickly. Therefore, the driver’s starting intention fuzzy controller is designed to identify the starting demand in this paper.
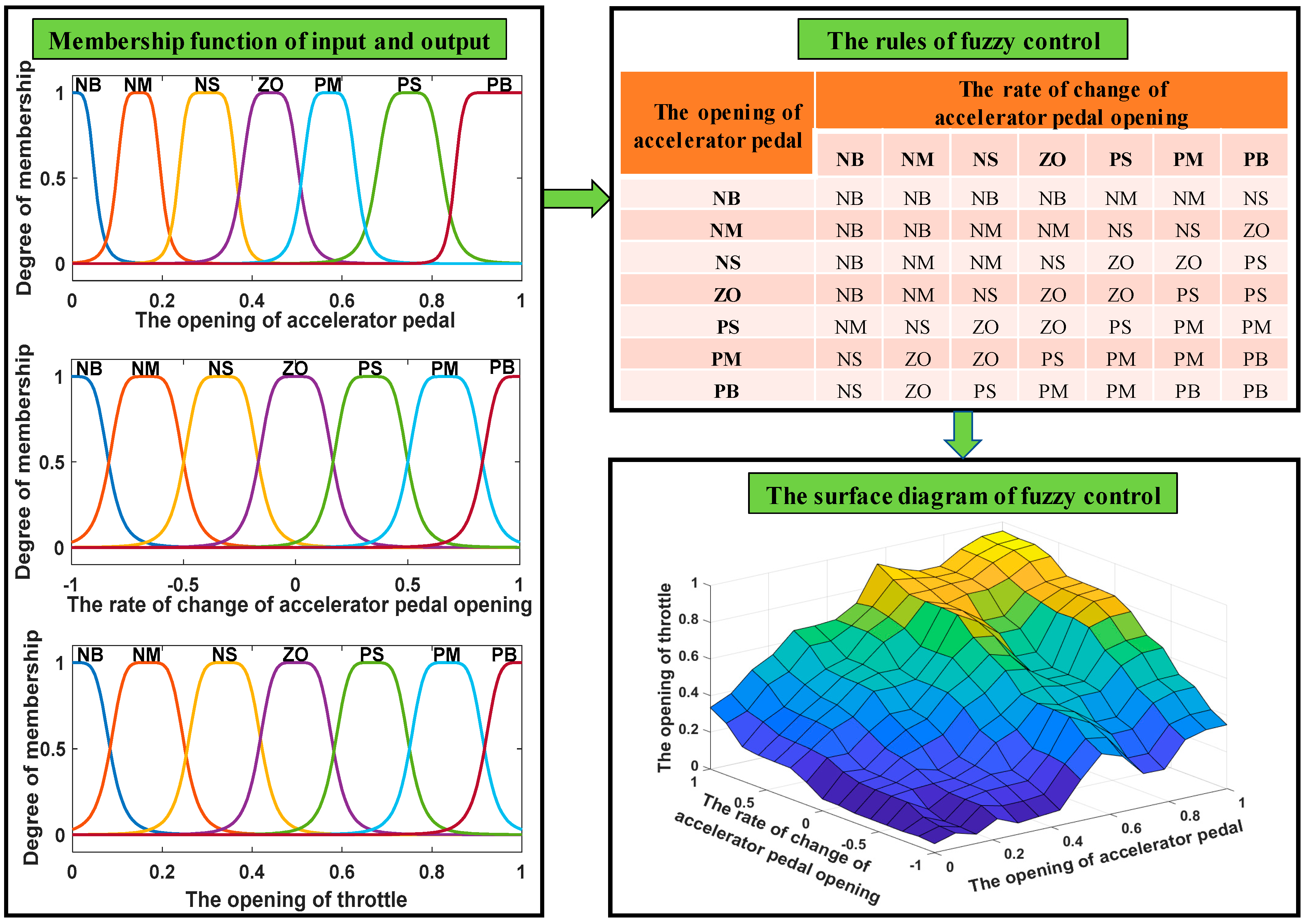
With different starting scenarios, such as downhill or low-adhesion road starting, the driver adjusts the vehicle’s starting status by controlling the accelerator pedal. Therefore, the driver’s starting intention can be measured by the opening of the accelerator pedal and the change rate in the opening of the pedal. In practice, the driver operates the accelerator pedal differently under different starting conditions and the corresponding correction is required in case of misoperation. In this paper, the fuzzy language of the accelerator pedal opening is set as very slow (NB), slow (NM), relatively slow (NS), medium (ZO), relatively fast (PS), fast (PM), quick (PB), and the basic domain is [0, 1]. The fuzzy language of the change rate of accelerator pedal opening is set as negative big (NB), negative middle (NM), negative small (NS), zero (ZO), positive small (PS), positive middle (PM), positive big (PB), and the basic universe is [−100%, 100%]. The fuzzy language of the electronic throttle is set as very slow (NB), slow (NM), relatively slow (NS), medium (ZO), relatively fast (PS), fast (PM), quick (PB), and the basic domain is [0, 1]. The opening and changing rate of the accelerator pedal pressed by the driver are used to formulate fuzzy inference rules based on the driver’s starting experience to obtain the electronic throttle opening signal, as shown in
Figure 5.
The electronic throttle opening signal can be positively correlated with the starting demand torque and clutch pressure control rate. The greater the electronic throttle opening, the stronger the driver’s demand for engine torque. The larger the opening change rate, the faster the vehicle response is expected to be. From the control logic, a faster clutch oil pressure control rate response is required to meet the starting requirements. By accurately identifying the starting demand, the trends in the demand torque and clutch pressure control demand rate in the control strategy can be determined.
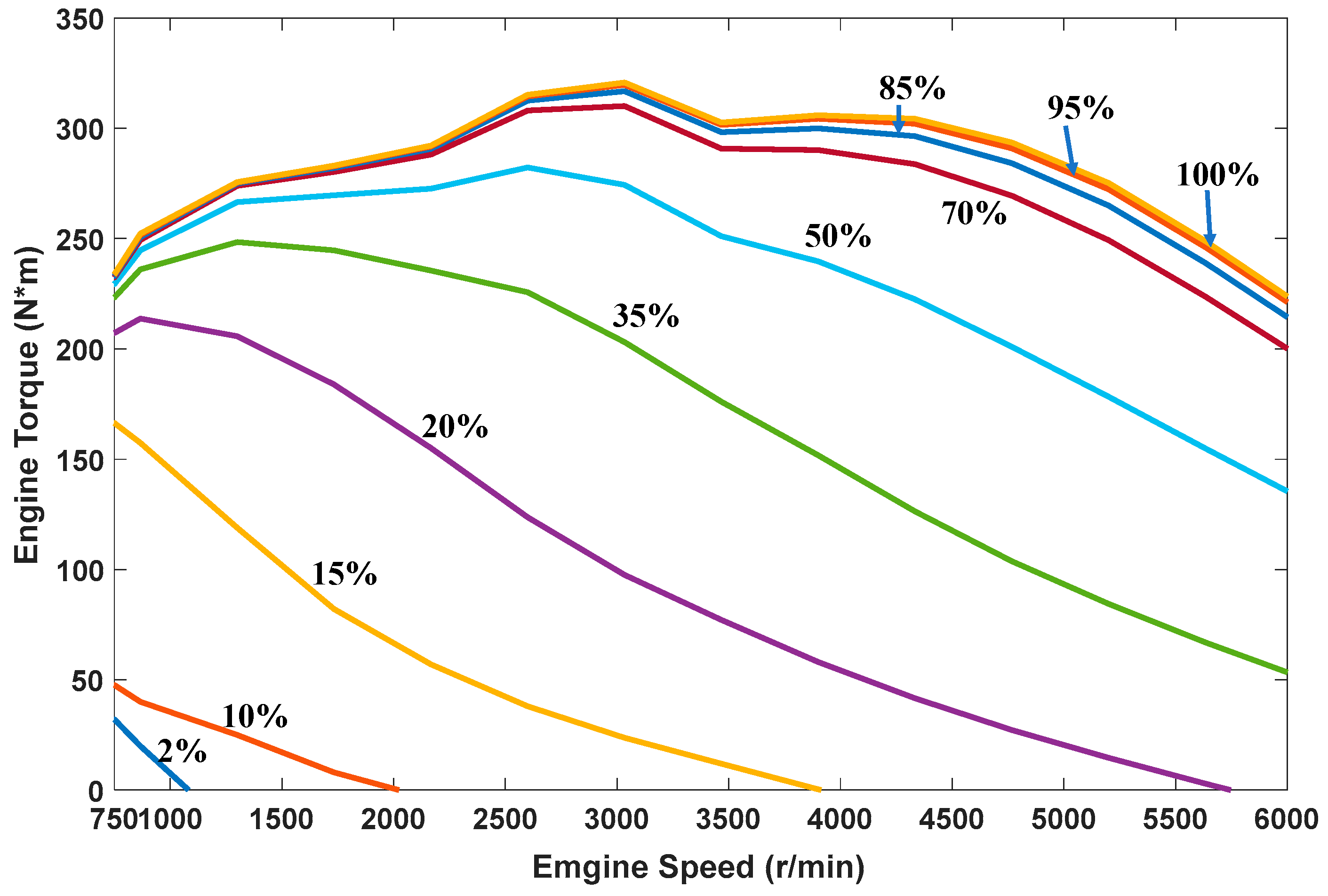
According to the partial load characteristic curve of the engine, as shown in
Figure 6, when the electronic throttle opening signal is taken as the input, the point where the engine torque is at the maximum torque under its opening is initially selected as the target point. The torque and speed at the target point correspond to the target torque and target speed in the starting process, respectively. To reduce the total starting time, the synchronization speed at the end of the starting process cannot be set too high. Meanwhile, the engine’s speed and torque vary rapidly and are prone to fluctuations. Therefore, the target point needs to be moved forward at the large throttle opening. In the control strategy, the degree of forwarding movement of the target point is determined by the target speed adjustment coefficient according to the rules established by the actual situation, as shown in
Table 1.
3.2. Adaptive Starting Control Strategy
The evaluation index of the starting process is usually expressed by the level of jerk and the friction work. The level of jerk is the derivative of the longitudinal acceleration of the vehicle, which reflects the dynamic essence of the vehicle starting process and the real feeling of human comfort from a quantitative perspective. The German standard limits the level of jerk to less than 10 m/s
3, which has been widely adopted [
40,
41,
42]. Since the starting process of the vehicle takes a short time and the velocity is low, it can be assumed that the road conditions and wind speed are essentially constant and the rate of change is zero. The level of jerk of the vehicle starting neglecting the flexibility of the shaft can be approximately expressed as follows:
where
is the conversion coefficient of vehicle rotating mass, and
is the mechanical efficiency of the transmission system.
The magnitude of the friction work of the DCT is related to the frictional torque, the sliding time, the speed differences between the driving and driven discs, and other parameters. The sliding friction work is considered a measure of the wear degree of the clutch. In the vehicle starting process, the greater the sliding friction work, the more serious the wear of the clutch. For the dual-clutch parallel starting, the mathematical expression of the friction work is:
where
is the time when the clutch starts to combine and transmit torque, and
is the time when the clutch is fully combined.
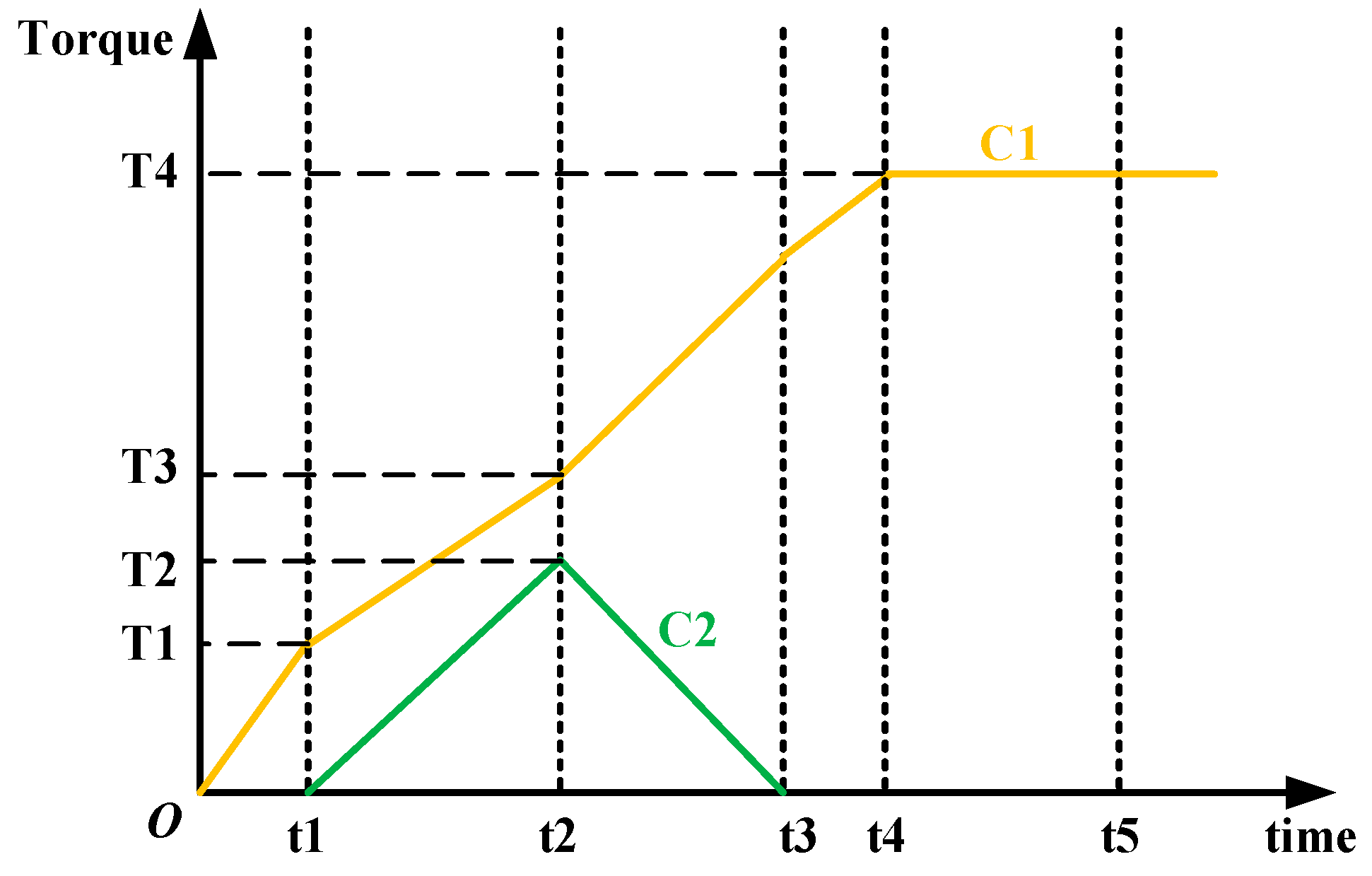
For the strategy developed in this paper, the dual-clutch simultaneous starting process can be analyzed from the clutch transmission torque, as shown in
Figure 7.
This defines the moment when the transport torque of the clutch is equal to the resistance torque as the torque balance point one, and this time slot represents the time from starting control to reaching the torque balance point one. During this process, the torque transmitted by the clutch is mainly used to overcome the resistance torque at the wheel end. First, the target gear during the starting process is chosen based on the target torque identified by the driver’s starting intention, which also determines the final engagement clutch. Then, whether the vehicle has a velocity when starting is determined to decide the clutch engagement speed. If the vehicle starts at a standstill, the engagement speed does not affect the level of jerk since the vehicle velocity is zero. To further shorten the engagement time, the final engagement clutch is controlled to engage at the designed fastest engagement rate to reach the torque balance point one. When the vehicle starts with speed, such as going downhill, it is required to engage at the maximum engagement rate under conditions less than the maximum impact.
This period represents the time from t1 to the point that the total transmitted torque of the two clutches is equal to
times of the target engagement torque
. The torque
transmitted to the wheel end meets:
where
is the torque adjustment coefficient.
The change rate of the transport torque of the clutch directly corresponds to the engagement speed of the clutch. It can be expressed as:
where
and
are, respectively, the change rate of the transport torque of clutch c1 and clutch c2,
and
are, respectively, the maximum change rate of the transport torque of clutch c1 and clutch c2, which is determined by the performance of the hardware control system of the clutch, and
and
are, respectively, the engagement speed adjustment coefficient of clutch c1 and clutch c2.
According to Equations (19), (21) and (22), to ensure that the level of jerk of the vehicle is within the proper range, the change rate of the transport torque
and
of the two clutches need to be limited by adjusting the engagement speed adjustment coefficient to meet the following requirements:
where
.
The engagement torque adjustment coefficient
needs to be designed according to the starting intention. When the starting torque demand is large, the coefficient is smaller, and the final clutch engagement speed is designed to be higher to prepare for the clutch engagement for the next stage. Meanwhile, due to the large damping of the system, the engagement speed is also subject to relevant constraints to avoid shocks. In the control strategy,
,
, and
are capable of adaptive adjustment based on the rules in
Table 2. It is important to mention that these adjustment coefficients vary, mainly according to the opening of the electronic throttle, and are calculated by interpolation according to the given design values, which come from actual experimental calibrations. The data in
Table 1 and
Table 2 are only the reference values used for the simulation. Under the condition of satisfying the level of jerk, the total torque transmitted by the synchronous engagement of two clutches does not change compared to the engagement of the single clutch, and the driving torque obtained by the vehicle is also the same. Therefore, the time consumption of this process is not different from that of the single-clutch engagement.
When the transmitted torque of the clutch is the same as the engine torque, it is defined as the torque balance point two. This time slot represents the time taken from t2 to the torque balance point two. Since both clutches are simultaneously engaged, the initial state of the process is that both clutches have some degree of slip. The process is similar to that of a dual-clutch shift, in that the final control will make the torque transmitted by one clutch is equal to the engine torque and the torque transmitted by the other clutch equal to 0. Linear quadratic forms are easily implemented for closed-loop optimal control and are widely used. In this paper, linear quadratic form optimal control is used to design the control strategy, which will be described in detail in
Section 3.3.
At this stage, the unengaged clutch is fully released and the transmitted torque is zero. Based on the transmitted torque of the clutch to be engaged calculated with the linear quadratic, it is controlled to engage at the maximum bonding speed that satisfies the shock degree until the engine torque can be transmitted.
This period represents the time taken to speed synchronization from t3. At this time, the final clutch is still sliding, and the velocity of the vehicle is also increasing. Finally, the clutch is locked and does not slip when the speed of the master and slave discs of the clutch is close to the same. Additionally, the starting process is completely completed.
3.3. Linear Quadratic Optimal Control
Considering the short t2–t3 process, the moment of inertia can be combined and Equation (1) can be further simplified as:
where
,
is the speed of the engine and
is the speed of the wheel.
The use of linear quadratic optimal control requires the expression of the relevant state space to be rewritten into a form that satisfies the requirements in order to be solved [
37]. For the control design, the state variables can be chosen as:
and the control variables as:
With Equations (24)–(26), the powertrain dynamic model can be written as
or more compact as the linear time-invariant state equation:
where
The level of jerk can be derived as:
where
.
The friction work of the DCT can be derived as:
When the torque balance point two is reached, the transmitted torque of the unengaged clutch is zero while the engaged clutch transmits the same torque as the engine torque. The linear part of the output variables can be considered as:
where
,
.
The cost function for the LQR design needs to be minimized is:
Based on this, the non-linear part is added to form a new function:
where
,
,
,
,
,
, and
.
According to the principles related to linear-quadratic optimal control, the optimal regulation action satisfies state feedback of the following form:
where
satisfies the matrix Riccati differential equation:
Additionally, it is the symmetric solution at the boundary conditions:
3.4. Clutch Control
It is clear from the previous analysis that the developed starting adaptive control strategy specifies the amount of torque that needs to be transmitted by each clutch during the starting process, and it is a theoretical demand value. However, the actual transmission torque of the clutch is directly related to the positive pressure of the clutch control mechanism and has a strong nonlinear, according to
Section 2.2. In the actual control process, it is easy to have too much or too little positive pressure, which can cause fluctuations in the clutch transmitted torque and produces undesirable phenomena such as whole vehicle shocks.
Therefore, the combined pressure feedback controller based on the PID algorithm is designed to control the wet clutch bonding positive pressure and its engagement speed. The target positive pressure is set as
, and the positive pressure correction amount is:
where
,
, and
are, respectively, the proportional coefficient, integral coefficient, and differential coefficient.
Based on the accurate wet clutch model and the correspondence between the clutch positive pressure and the transmitted torque, the actual transmitted torque at different positive pressures is compared to the demand torque obtained from the control strategy. Additionally, the positive pressure value is adjusted by real-time correction so that the actual friction torque can respond to follow the optimal torque control trajectory.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}