
Selective Passive/Active Switchable Knee Prosthesis Based on Multifunctional Rotary Hydraulic Cylinder for Transfemoral Amputees
Abstract
:1. Introduction
2. Methods
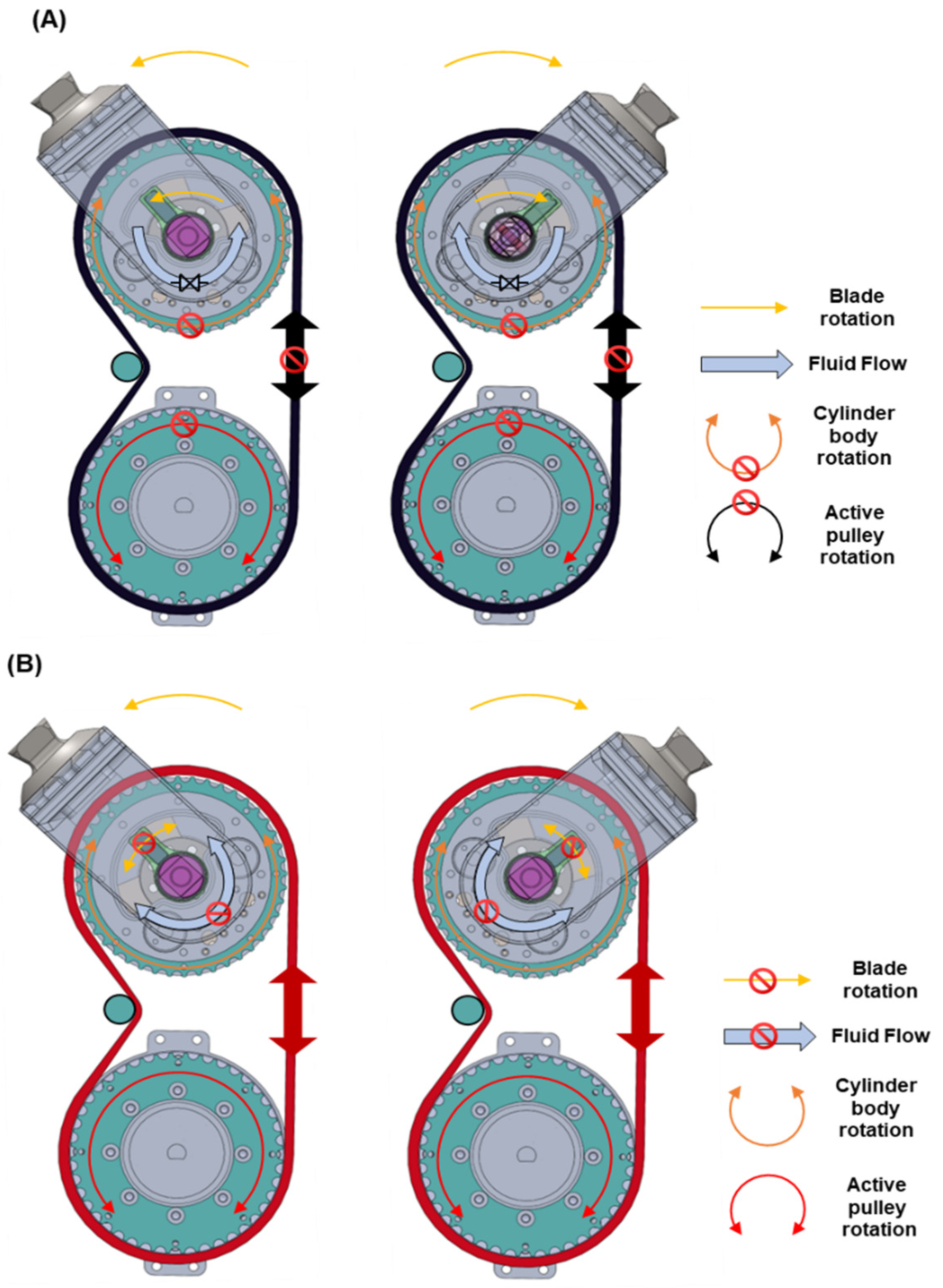
2.1. Driving Principle of Rotary Hybrid Actuator
2.2. Development of Multifunctional Rotary Hydraulic Cylinder
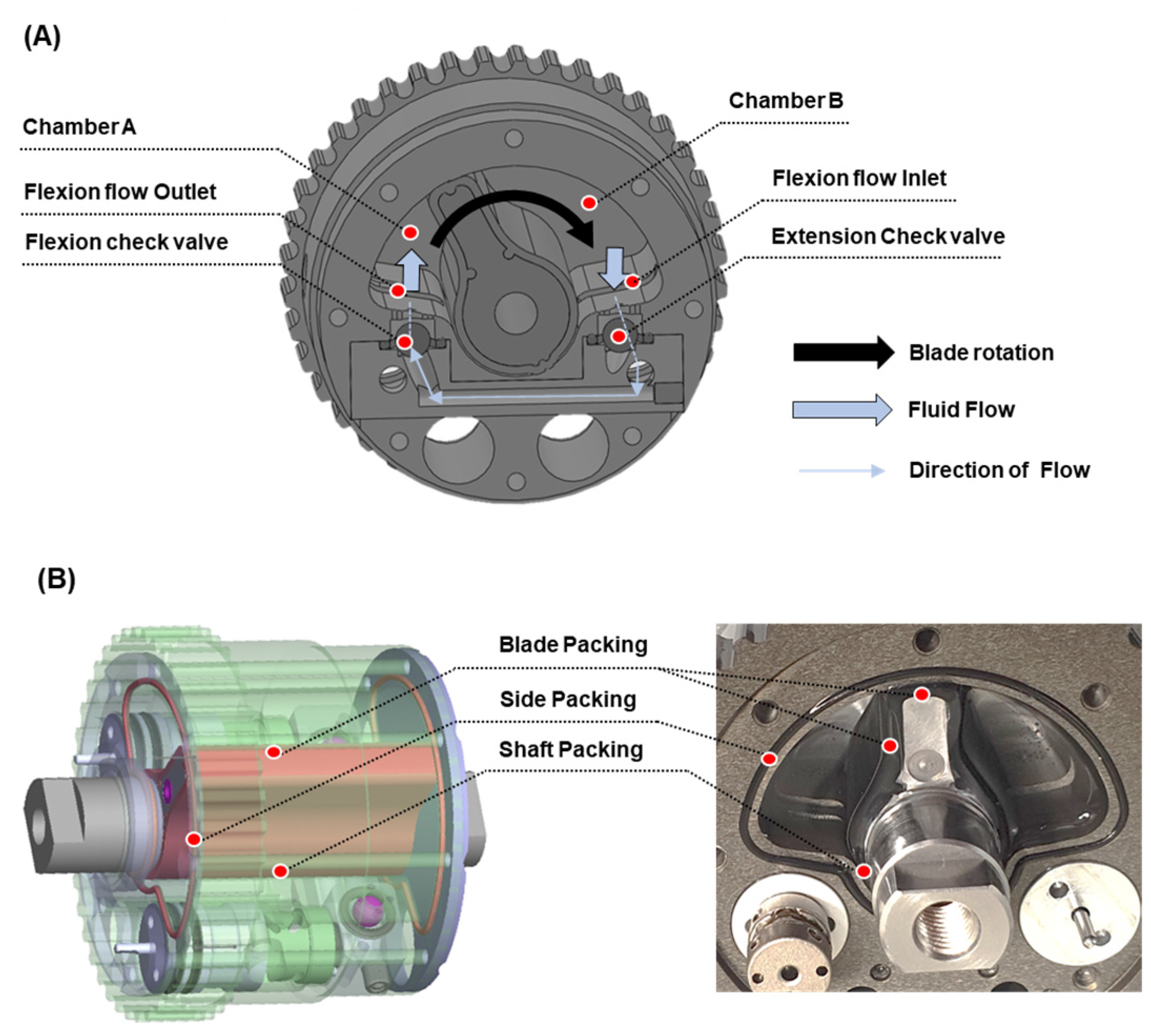
2.2.1. Design of Rotary Hydraulic Cylinder
2.2.2. Shape Design of the Rotary Blade
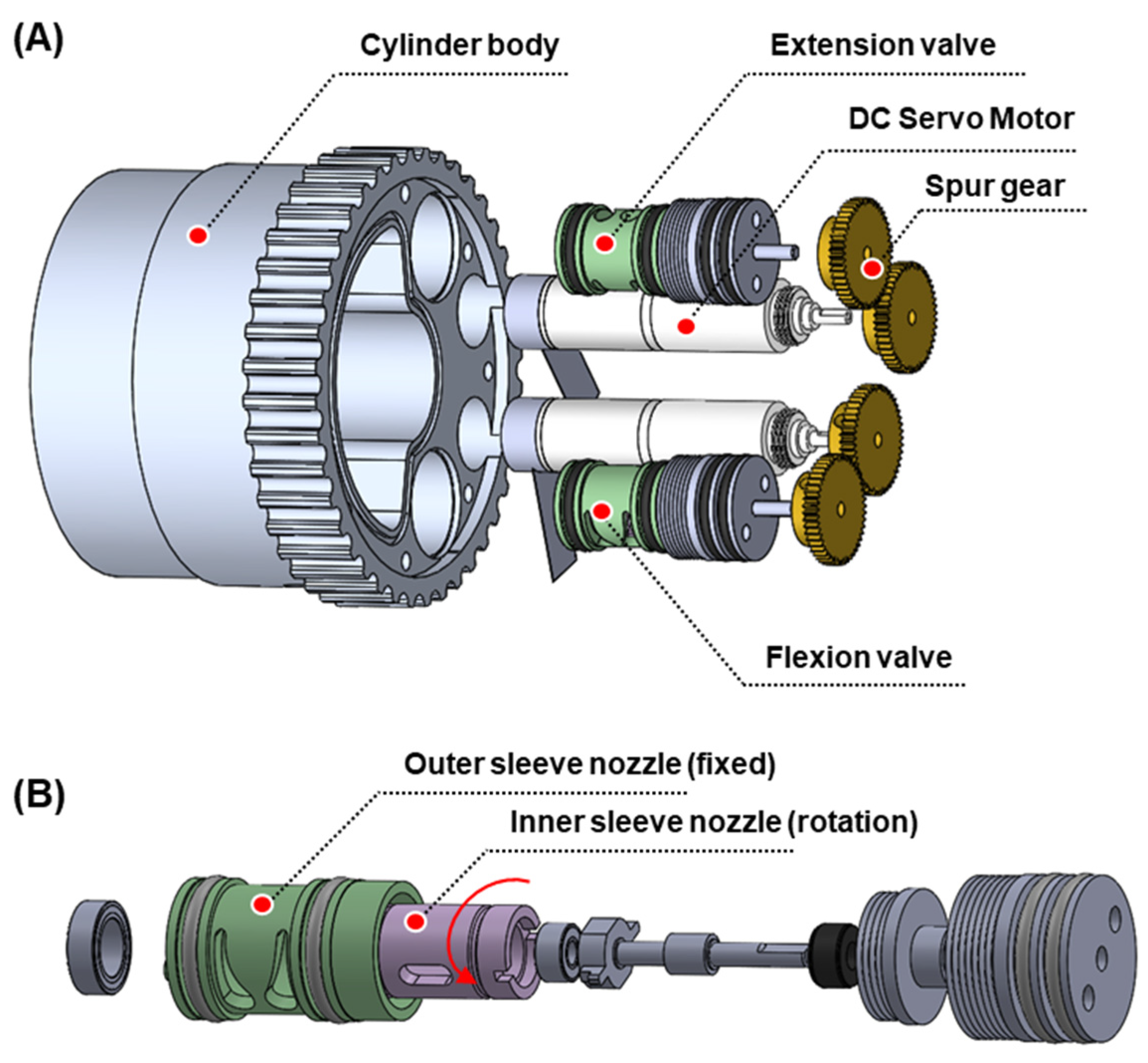
2.2.3. Structure of Rotary Hydraulic Nozzle
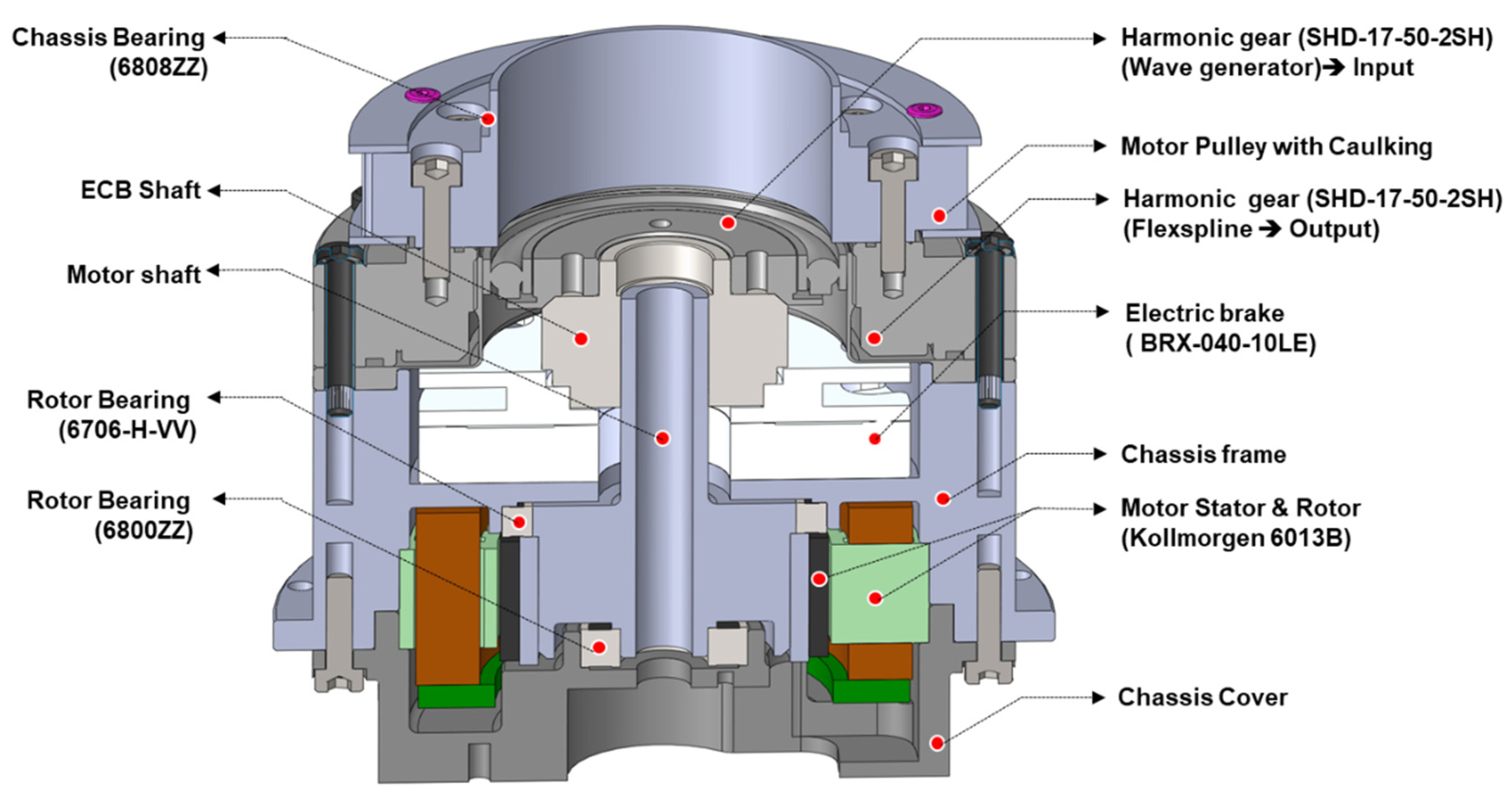
2.3. Motor Drive Module
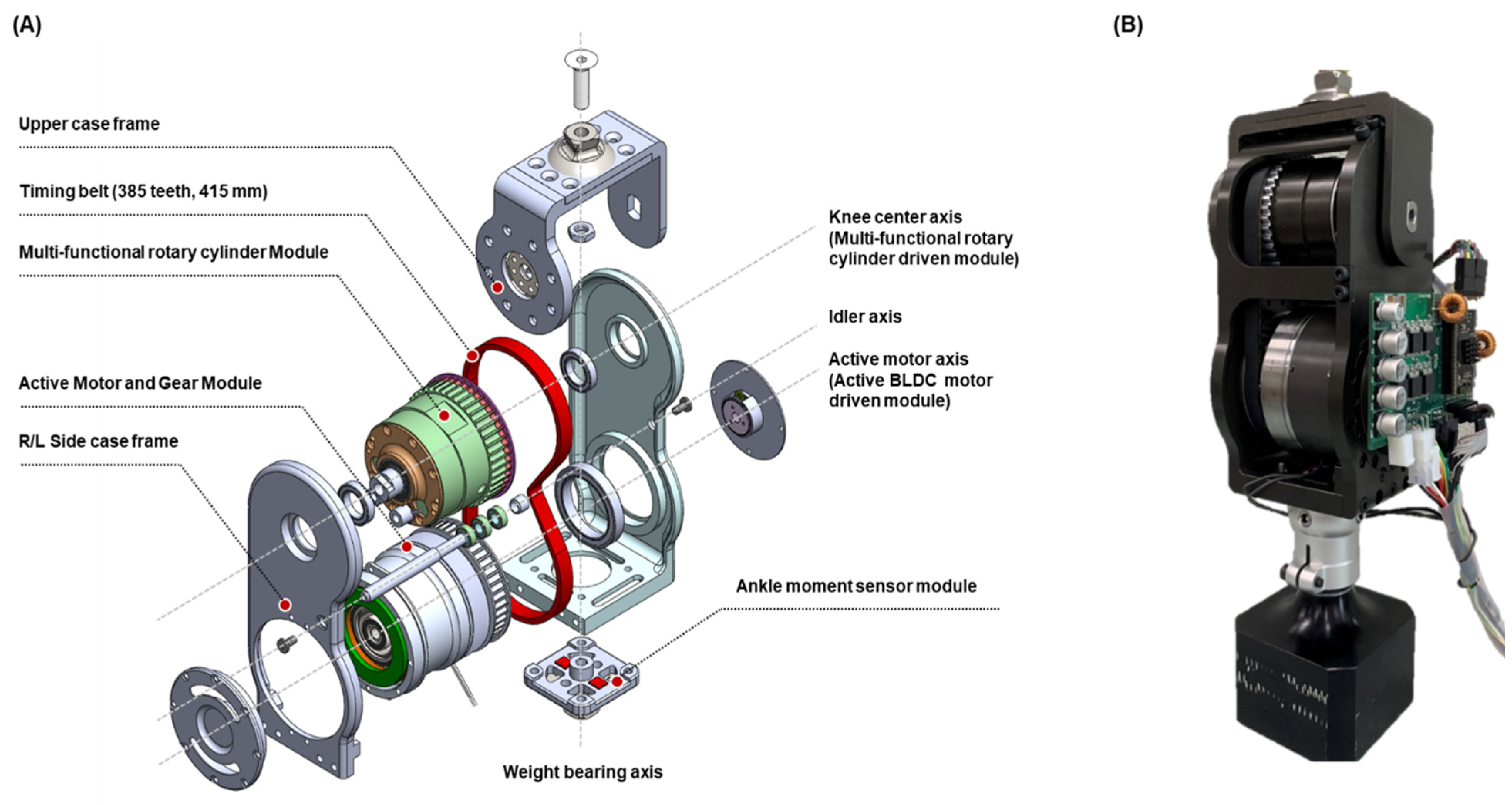
2.4. Sensor and Frame Modules
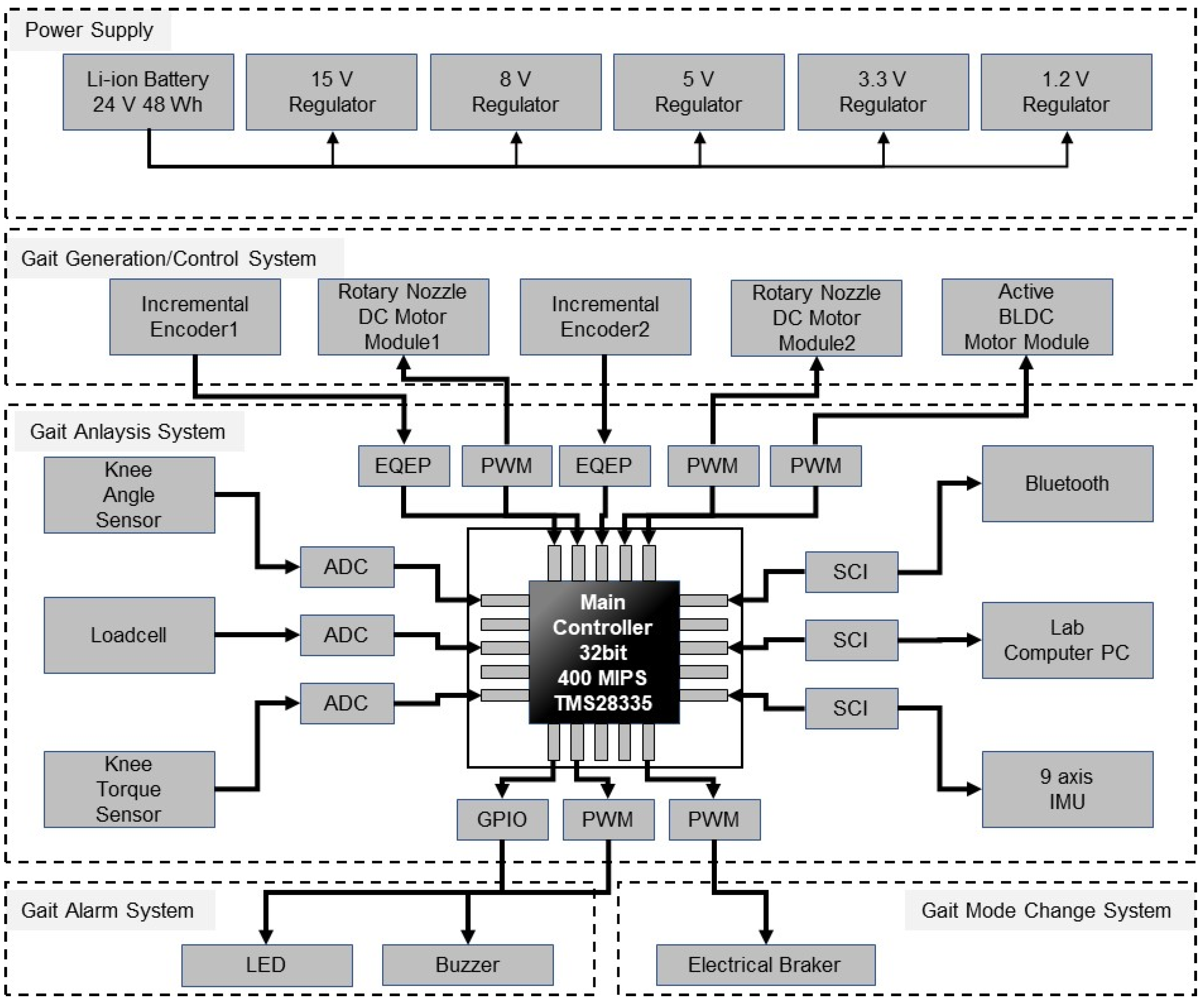
2.5. Embedded Electronics
2.6. Control Algorithm
2.6.1. Gait Event Detection
2.6.2. Gait Control in Passive Mode
2.6.3. Gait Control in Active Mode
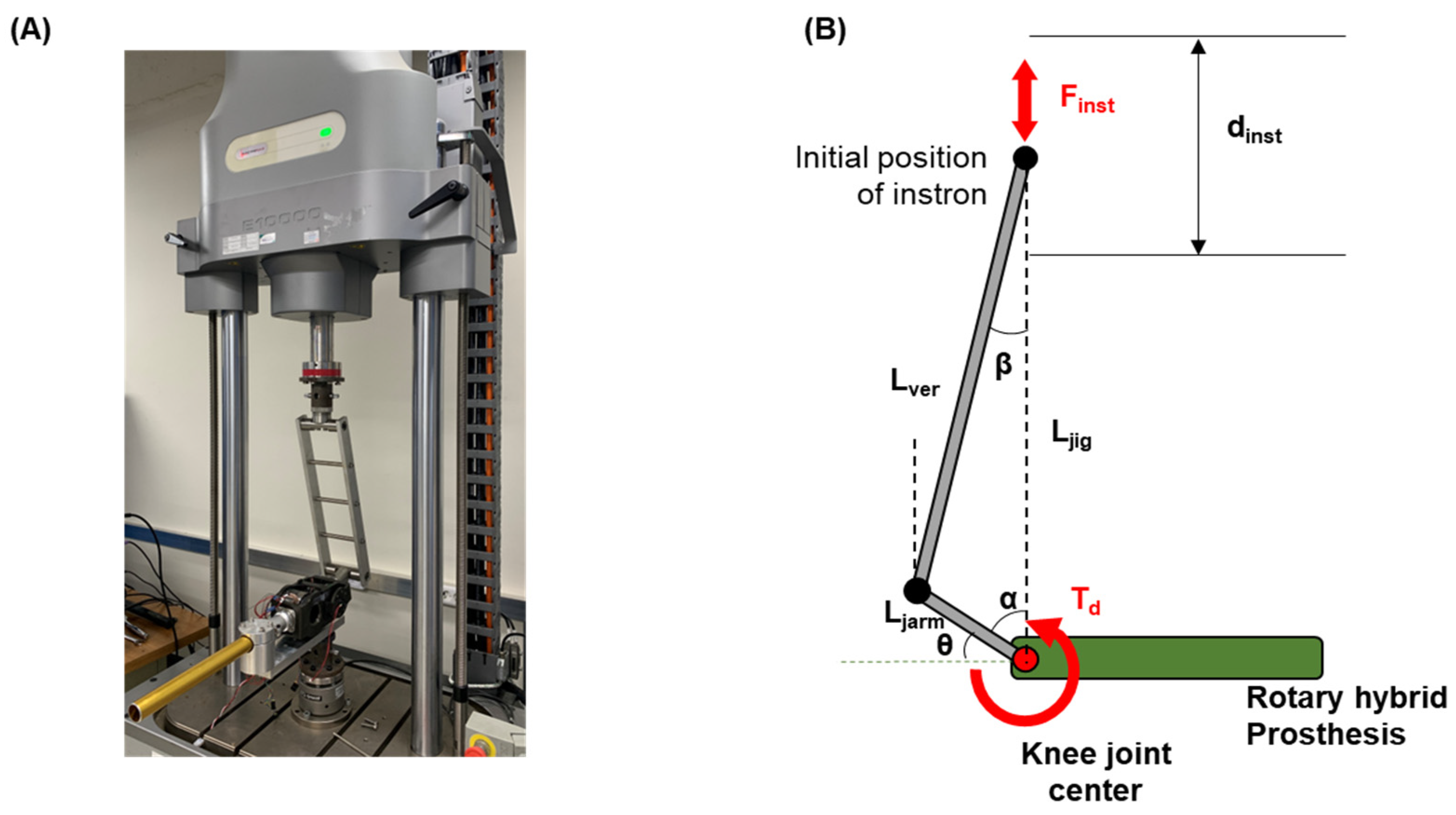
2.7. Construction of Test System
3. Results
3.1. Verification of Passive Mode Operation (Feasibility Test)
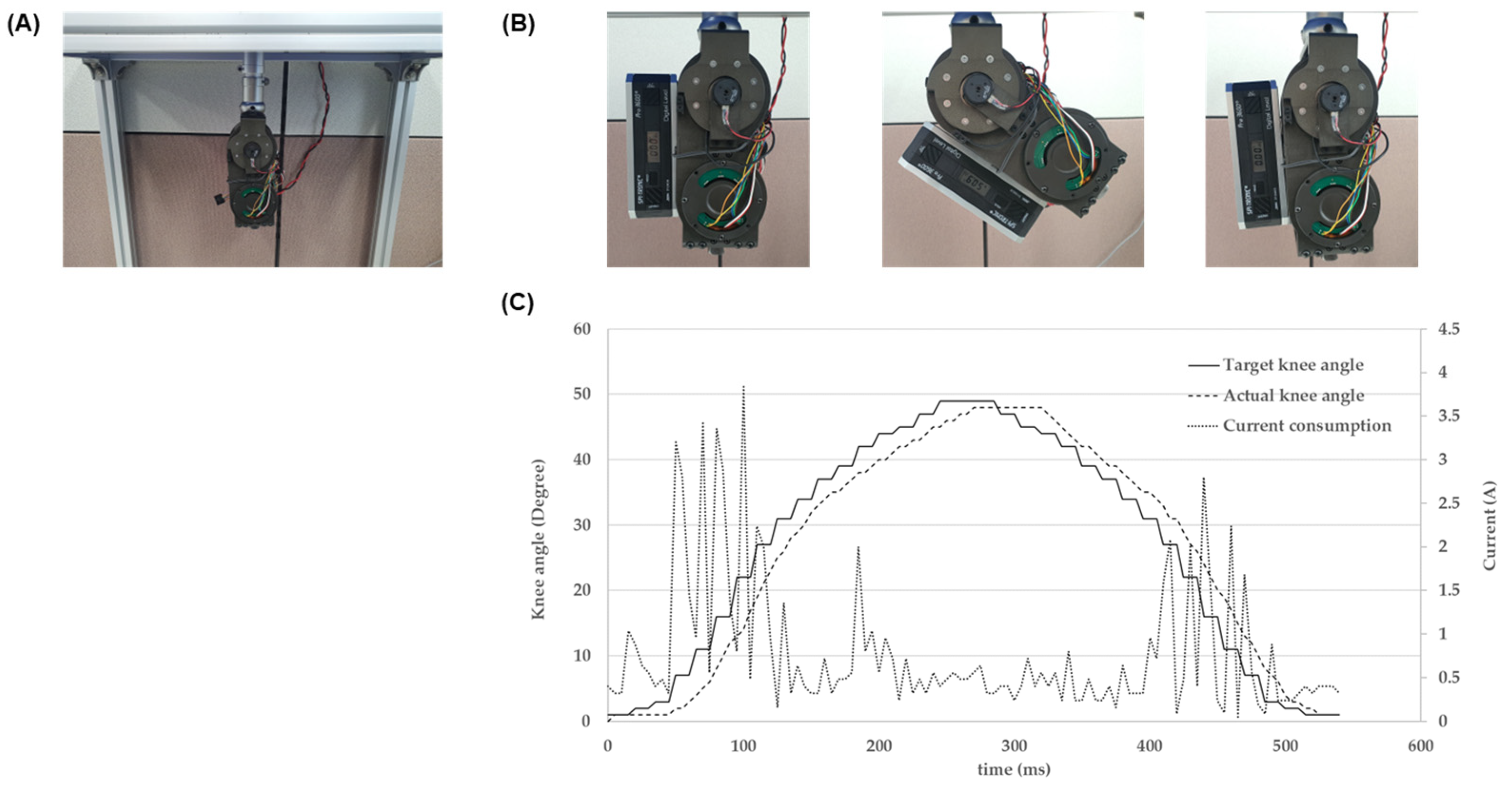
3.2. Verification of Active Mode Operation (Feasibility Test)
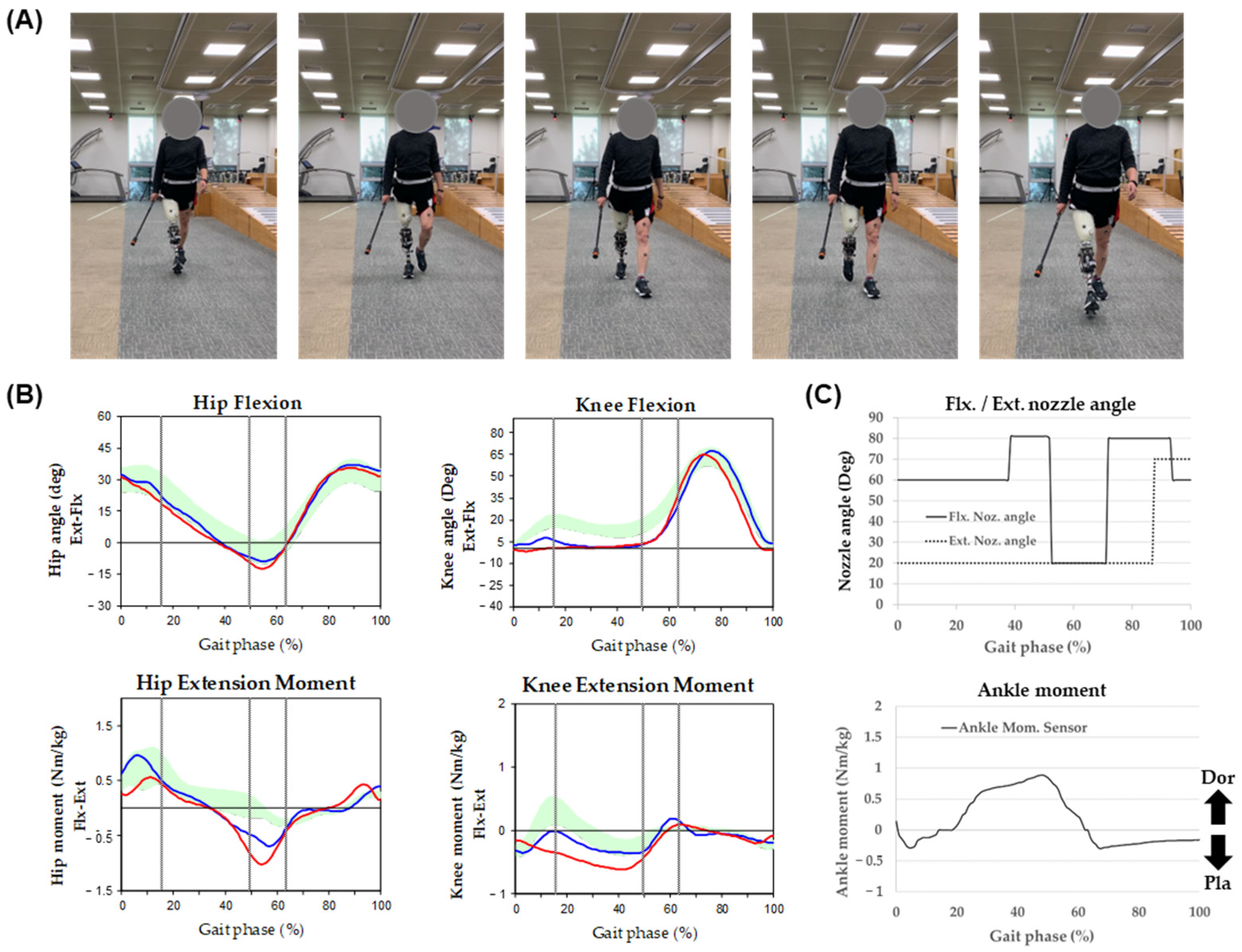
3.3. Clinical Test for a Transfemoral Amputee
4. Discussion
5. Patents
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ziegler-Graham, K.; MacKenzie, E.J.; Ephraim, P.L.; Travison, T.G.; Brookmeyer, R. Estimating the prevalence of limb loss in the United States: 2005 to 2050. Arch. Phys. Med. Rehabil. 2008, 89, 422–429. [Google Scholar] [CrossRef] [PubMed]
- Jay Martin, A.P.; Jessica, H. Microprocessor Lower Limb Prosthetics: Review of Current State of the Art. J. Prosthet. Orthot. 2010, 22, 183–193. [Google Scholar] [CrossRef]
- Tucker, M.R.; Olivier, J.; Pagel, A.; Bleuler, H.; Bouri, M.; Lambercy, O.; Millán, J.d.R.; Riener, R.; Vallery, H.; Gassert, R. Control strategies for active lower extremity prosthetics and orthotics: A review. J. Neuroeng. Rehabil. 2015, 12, 1. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, M.Y.; Torrealba, R.R.; Fernández-López, G.; Grieco, J.C. Towards the development of knee prostheses: Review of current researches. Kybernetes 2008, 37, 1561–1576. [Google Scholar] [CrossRef]
- Yan, T.; Cempini, M.; Oddo, C.M.; Vitiello, N. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Shields, B.L.; Fite, K.B.; Goldfarb, M. Design, control, and energetic characterization of a solenoid-injected monopropellant-powered actuator. IEEE/ASME Trans. Mechatron. 2006, 11, 477–487. [Google Scholar] [CrossRef]
- Sup, F.; Varol, H.A.; Mitchell, J.; Withrow, T.; Goldfarb, M. Design and Control of an Active Electrical Knee and Ankle Prosthesis. In Proceedings of the 2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008; Volume 2008, pp. 523–528. [Google Scholar] [CrossRef] [Green Version]
- Lawson, B.E.; Huff, A.; Goldfarb, M. A preliminary investigation of powered prostheses for improved walking biomechanics in bilateral transfemoral amputees. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 10 November 2012; pp. 4164–4167. [Google Scholar] [CrossRef]
- Lawson, B.E.; Mitchell, J.; Truex, D.; Shultz, A.; Ledoux, E.; Goldfarb, M. A Robotic Leg Prosthesis: Design, Control, and Implementation. IEEE Robot. Autom. Mag. 2014, 21, 70–81. [Google Scholar] [CrossRef]
- Sup, F.; Varol, H.A.; Goldfarb, M. Upslope walking with a powered knee and ankle prosthesis: Initial results with an amputee subject. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 71–78. [Google Scholar] [CrossRef]
- Ledoux, E.D.; Goldfarb, M. Control and Evaluation of a Powered Transfemoral Prosthesis for Stair Ascent. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 917–924. [Google Scholar] [CrossRef]
- Martinez-Villalpando, E.C.; Herr, H. Agonist-antagonist active knee prosthesis: A preliminary study in level-ground walking. J. Rehabil. Res. Dev. 2009, 46, 361. [Google Scholar] [CrossRef]
- Martinez-Villalpando, E.C.; Mooney, L.; Elliott, G.; Herr, H. Antagonistic active knee prosthesis. A metabolic cost of walking comparison with a variable-damping prosthetic knee. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; Volume 2011, pp. 8519–8522. [Google Scholar] [CrossRef]
- Rouse, E.J.; Mooney, L.M.; Herr, H.M. Clutchable series-elastic actuator: Implications for prosthetic knee design. Int. J. Robot. Res. 2014, 33, 1611–1625. [Google Scholar] [CrossRef]
- Azocar, A.F.; Mooney, L.M.; Hargrove, L.J.; Rouse, E.J. Design and Characterization of an Open-Source Robotic Leg Prosthesis. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 111–118. [Google Scholar] [CrossRef]
- Tran, M.; Gabert, L.; Cempini, M.; Lenzi, T. A Lightweight, Efficient Fully Powered Knee Prosthesis With Actively Variable Transmission. IEEE Robot. Autom. Lett. 2019, 4, 1186–1193. [Google Scholar] [CrossRef]
- Lenzi, T.; Cempini, M.; Hargrove, L.; Kuiken, T. Design, development, and testing of a lightweight hybrid robotic knee prosthesis. Int. J. Robot. Res. 2018, 37, 953–976. [Google Scholar] [CrossRef]
- Tran, M.; Gabert, L.; Hood, S.; Lenzi, T. A lightweight robotic leg prosthesis replicating the biomechanics of the knee, ankle, and toe joint. Sci. Robot 2022, 7, eabo3996. [Google Scholar] [CrossRef]
- Culver, S.C.; Vailati, L.G.; Goldfarb, M. A Power-Capable Knee Prosthesis With Ballistic Swing-Phase. IEEE Trans. Med. Robot. Bionics 2022, 4, 1034–1045. [Google Scholar] [CrossRef]
- Guercini, L.; Tessari, F.; Driessen, J.; Buccelli, S.; Pace, A.; De Giuseppe, S.; Traverso, S.; De Michieli, L.; Laffranchi, M. An Over-Actuated Bionic Knee Prosthesis: Modeling, Design and Preliminary Experimental Characterization. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 5467–5473. [Google Scholar] [CrossRef]
- Bartlett, H.L.; King, S.T.; Goldfarb, M.; Lawson, B.E. Design and Assist-As-Needed Control of a Lightly Powered Prosthetic Knee. IEEE Trans. Med. Robot. Bionics 2022, 4, 490–501. [Google Scholar] [CrossRef]
- Wang, X.; Meng, Q.; Zhang, Z.; Sun, J.; Yang, J.; Yu, H. Design and evaluation of a hybrid passive–active knee prosthesis on energy consumption. Mech. Sci. 2020, 11, 425–436. [Google Scholar] [CrossRef]
- Chang, Y.; Ko, C.-Y.; Jeong, B.; Kang, J.; Choi, H.-J.; Kim, G.; Shin, H.; Park, S. Changes in Spatiotemporal Parameters and Lower Limb Coordination During Prosthetic Gait Training in Unilateral Transfemoral Amputees. Int. J. Precis. Eng. Manuf. 2022, 23, 361–373. [Google Scholar] [CrossRef]
- van der Linde, H.; Hofstad, C.J.; Geurts, A.C.; Postema, K.; Geertzen, J.H.; van Limbeek, J. A systematic literature review of the effect of different prosthetic components on human functioning with a lower-limb prosthesis. J. Rehabil. Res. Dev. 2004, 41, 555–570. [Google Scholar] [CrossRef]
- Orendurff, M.S.; Segal, A.D.; Klute, G.K.; McDowell, M.L.; Pecoraro, J.A.; Czerniecki, J.M. Gait efficiency using the C-Leg. J. Rehabil. Res. Dev. 2006, 43, 239. [Google Scholar] [CrossRef]
- Kannenberg, A.; Zacharias, B.; Probsting, E. Benefits of microprocessor-controlled prosthetic knees to limited community ambulators: Systematic review. J. Rehabil. Res. Dev. 2014, 51, 1469–1496. [Google Scholar] [CrossRef] [PubMed]
- Naseri, A.; Mohammadi Moghaddam, M.; Gharini, M.; Ahmad Sharbafi, M. A Novel Adjustable Damper Design for a Hybrid Passive Ankle Prosthesis. Actuators 2020, 9, 74. [Google Scholar] [CrossRef]
- Li, J.; Li, W.; Hu, H.; Sha, H.; Sun, L. Dynamics analysis and optimization for prosthesis based on drive energy consumption. In Proceedings of the 2013 IEEE 7th International Conference on Nano/Molecular Medicine and Engineering (NANOMED), Phuket, Thailand, 10–13 November 2013; pp. 18–21. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Specification |
|---|---|
| Active Motor | Kollmorgen, TMBS-6013B |
| Rotary Nozzle motor | Maxon, DCX12s with 26:1 planetary gear and CPT1024 encoder |
| Harmonic gear | Harmonic Drive, SHD14 |
| Pulley | Manufactured, Gear ratio 1:1, 72 teeth |
| Timing belt | MISUMI, EV5GT, 83 teeth, 415 mm |
| Electrical Brake | MIKI PULLEY, BXR-040-10LE |
| Sensors | IMU: EBIMU-9DOF |
| Knee angle sensor: WAL200/Rotary case angle sensor: WAL200 | |
| Strain gauge type ankle moment sensor | |
| Knee moment sensor: CAS torque sensor |
| Variable | Value | Description |
| Finst | Measured | Loading force by Instron |
| dinst | Measured | Vertical displacement of Instron |
| Td | Calculated | Damping torque on knee center |
| θ | Calculated | Relative knee angle |
| Design Constant | Value | Description |
| Lver | 386.8 mm | Length of jig vertical bar |
| Ljarm | 400 mm | Length of jig arm |
| Ljig | 101 + dinst | Length between knee center and initial position of Instron |
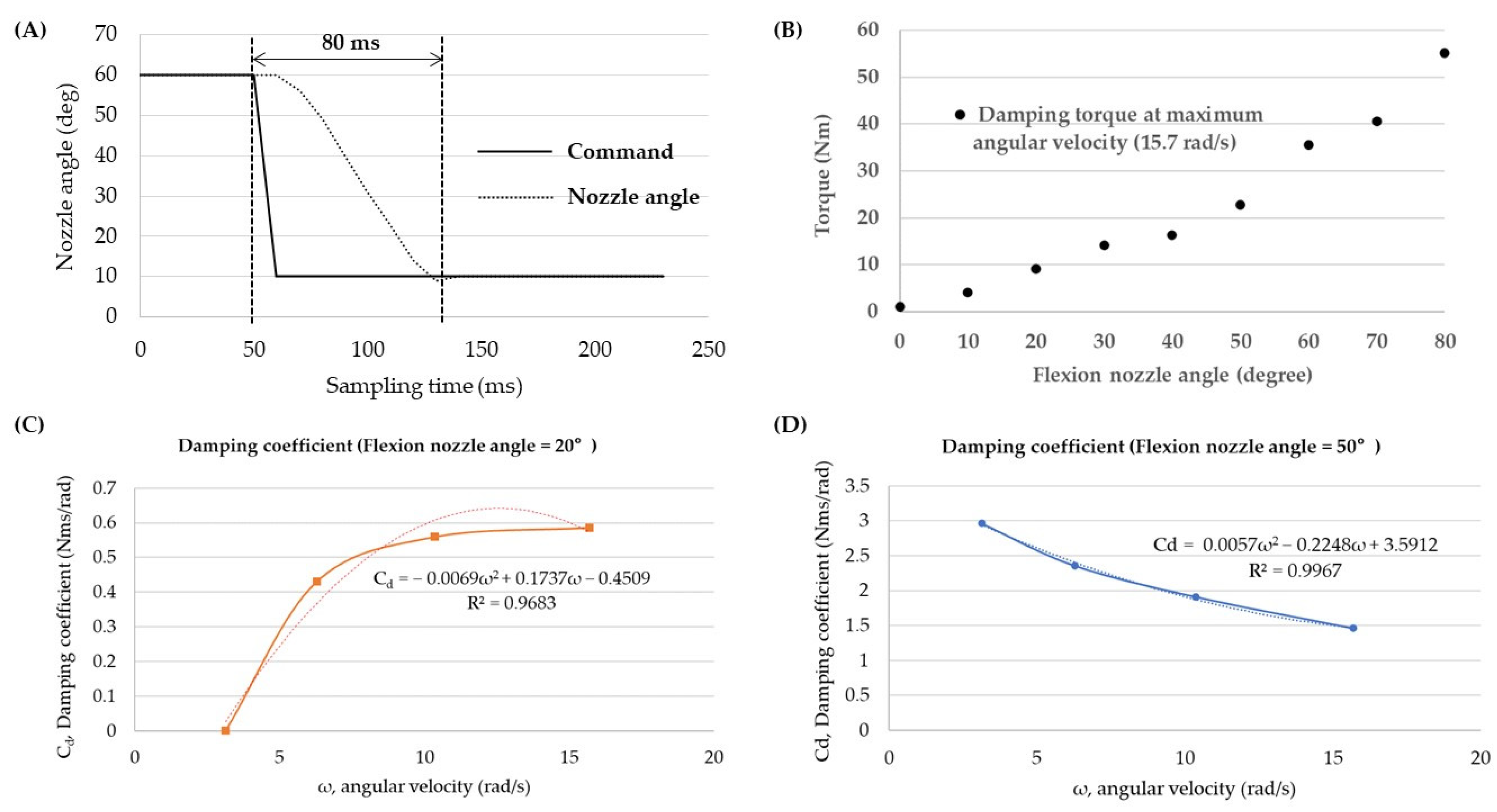
| ω, Angular Velocity (rad/s) | 3.14 | 6.28 | 10.36 | 15.7 |
|---|---|---|---|---|
| Td, Damping torque at flexion nozzle angle of 20 degrees (Nm) | 0 | 2.7 | 5.8 | 9.2 |
| Cd, Damping coefficient at flexion nozzle angle of 20 degrees (Nms/rad) | 0 | 0.43 | 0.56 | 0.59 |
| Td, Damping torque at flexion nozzle angle of 50 degrees (Nm) | 9.3 | 14.8 | 19.8 | 22.9 |
| Cd, Damping coefficient at flexion nozzle angle of 50 degrees (Nms/rad) | 2.96 | 2.36 | 1.91 | 1.46 |
| Item | Value |
|---|---|
| Weight (kg) (without battery) | 2.59 |
| Height (mm) | 227 |
| ROM (degree) | 122 |
| Cylinder locking torque (Nm) | 62.1 |
| Active locking torque (Nm) | 65 |
| Active torque (Nm) | 39.4 |
| Swing angular speed (deg/s) | 247.9 |
| Operating mode | 2 (Passive/Active) |
| Operating time (Battery: 7-cell condition) | 120 h over (Passive mode), 6 h (Active mode) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, H.; Park, J.; Lee, H.; Jung, S.; Jeon, M.; Park, S. Selective Passive/Active Switchable Knee Prosthesis Based on Multifunctional Rotary Hydraulic Cylinder for Transfemoral Amputees. Actuators 2023, 12, 118. https://doi.org/10.3390/act12030118
Shin H, Park J, Lee H, Jung S, Jeon M, Park S. Selective Passive/Active Switchable Knee Prosthesis Based on Multifunctional Rotary Hydraulic Cylinder for Transfemoral Amputees. Actuators. 2023; 12(3):118. https://doi.org/10.3390/act12030118
Chicago/Turabian StyleShin, Hyunjun, Jinkuk Park, Huitae Lee, Sungyoon Jung, Mankee Jeon, and Sehoon Park. 2023. "Selective Passive/Active Switchable Knee Prosthesis Based on Multifunctional Rotary Hydraulic Cylinder for Transfemoral Amputees" Actuators 12, no. 3: 118. https://doi.org/10.3390/act12030118