
Dielectric Elastomer Sensors with Advanced Designs and Their Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Advanced Sensor Designs
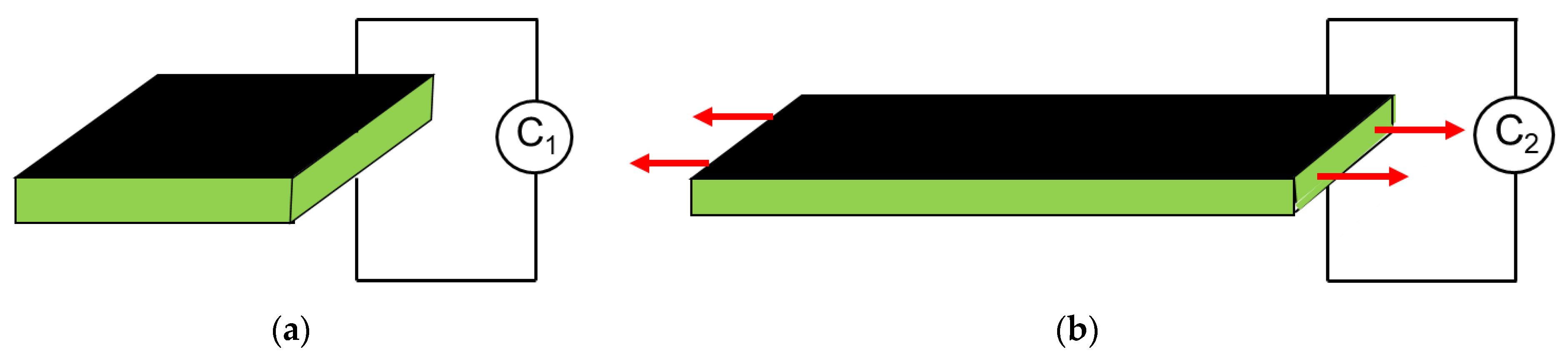
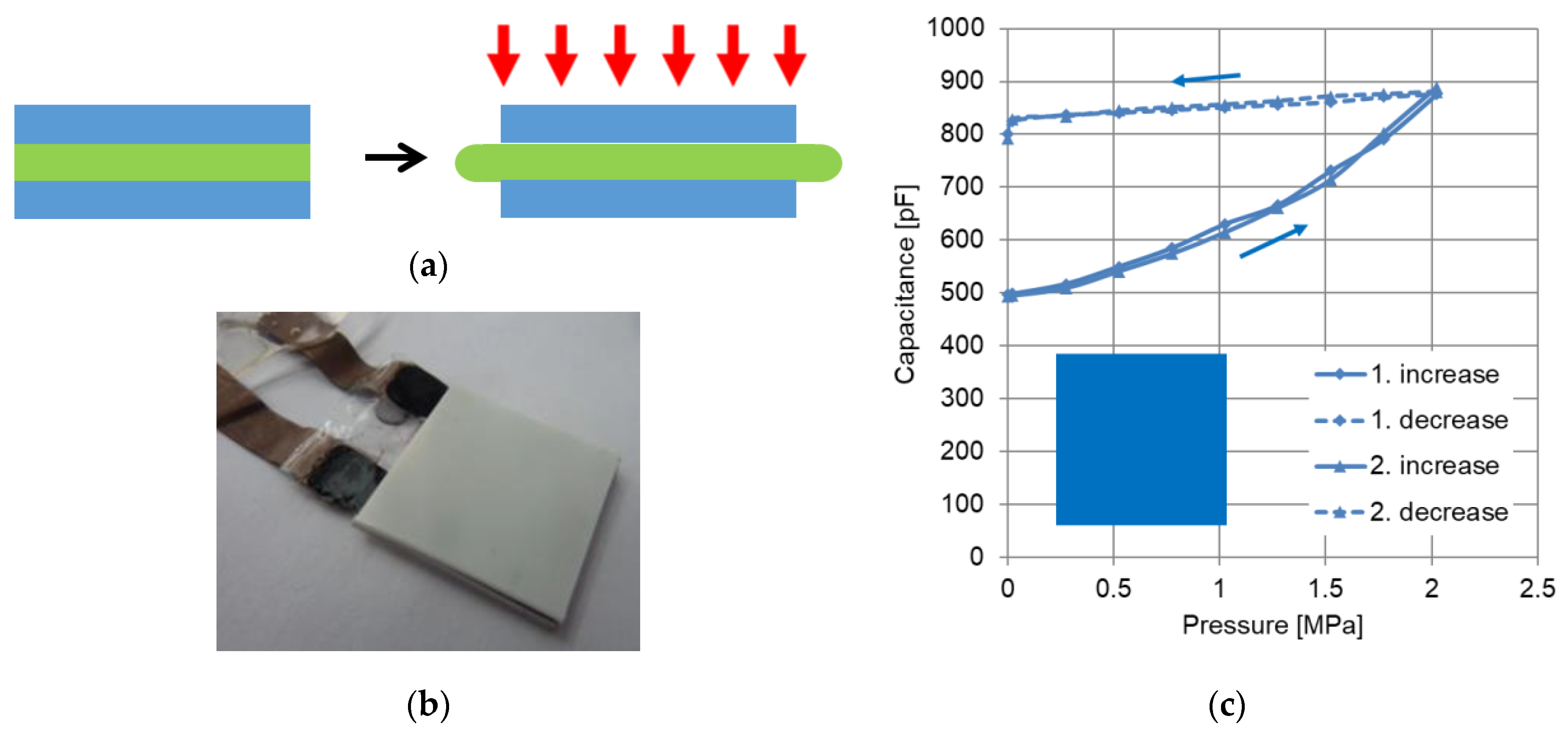
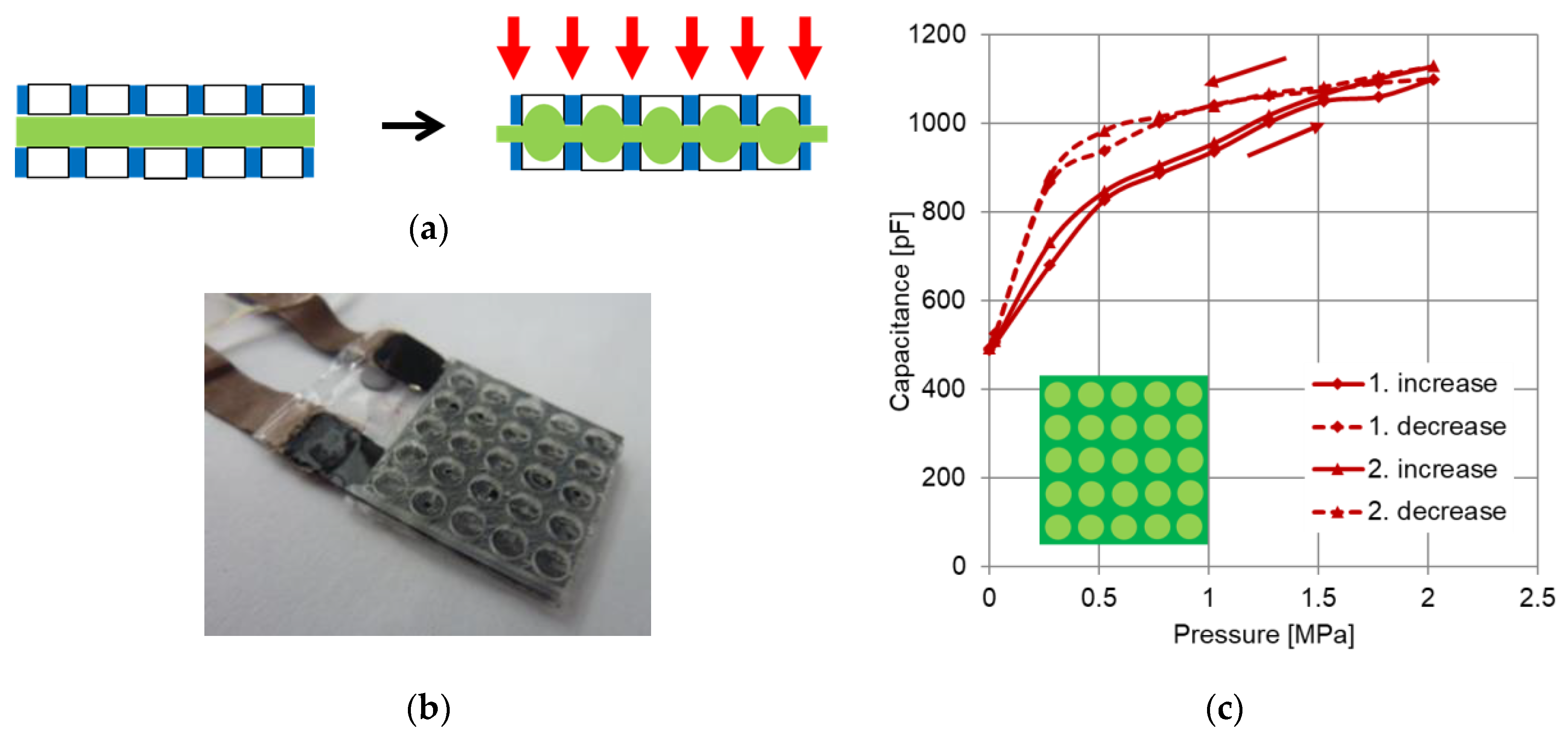
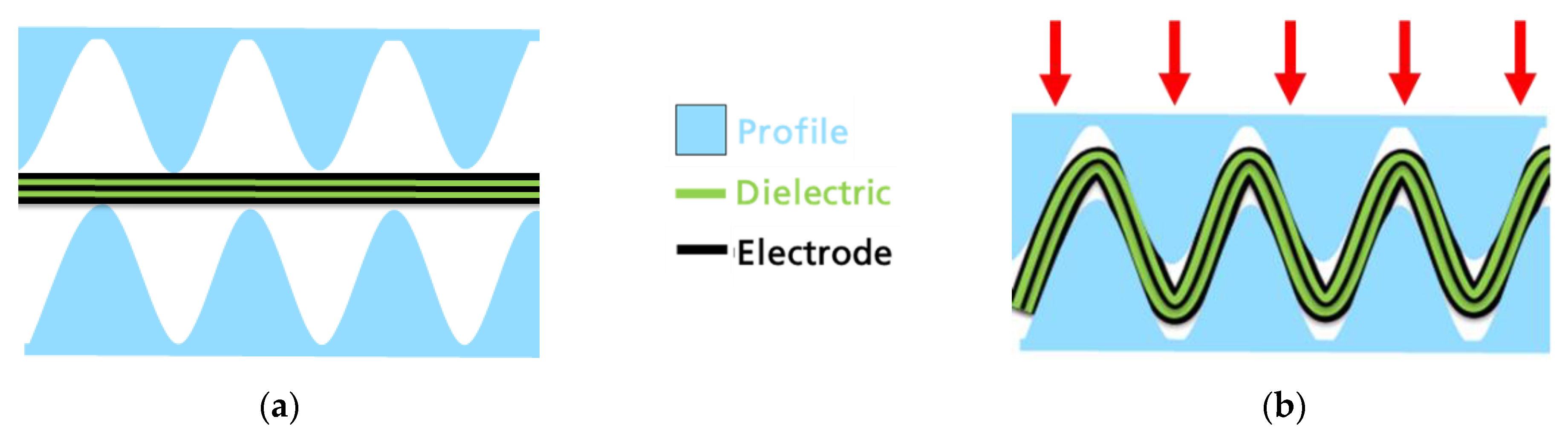
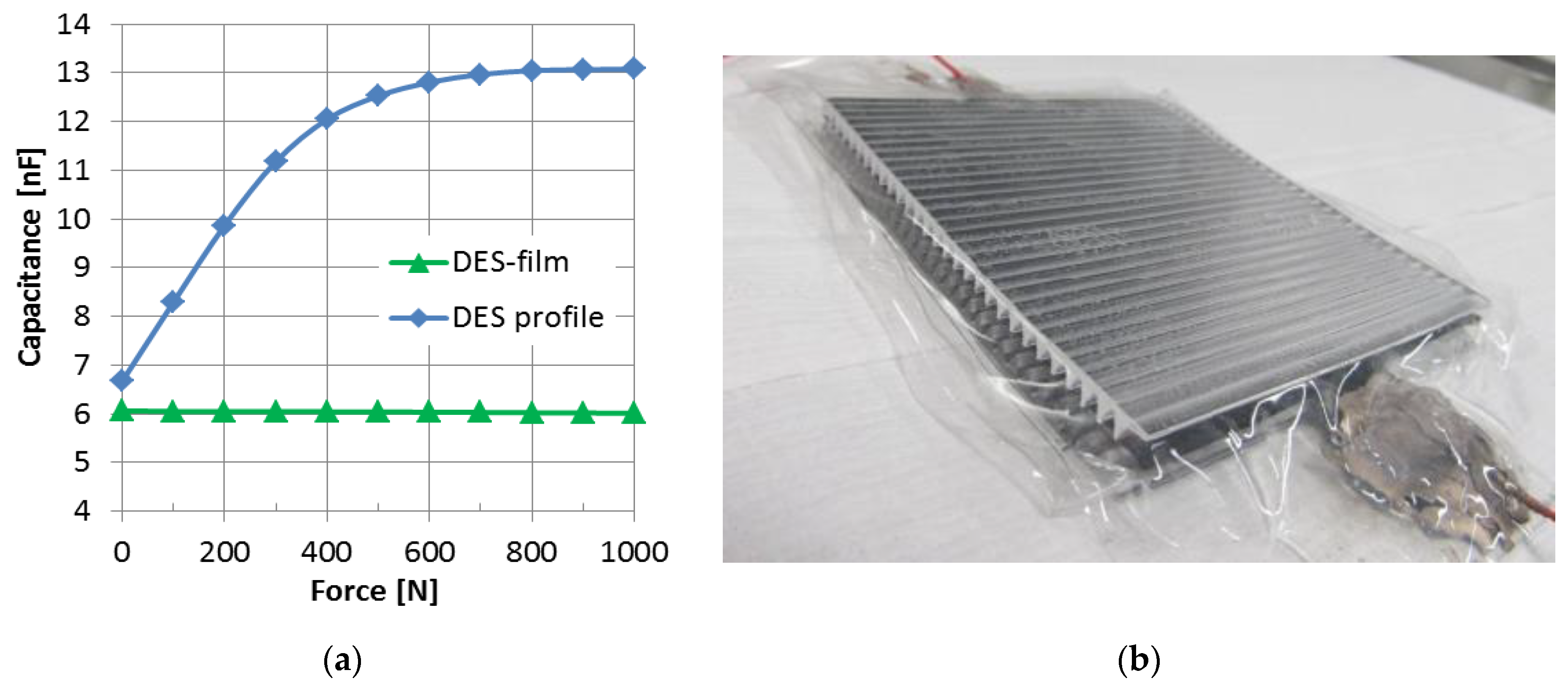
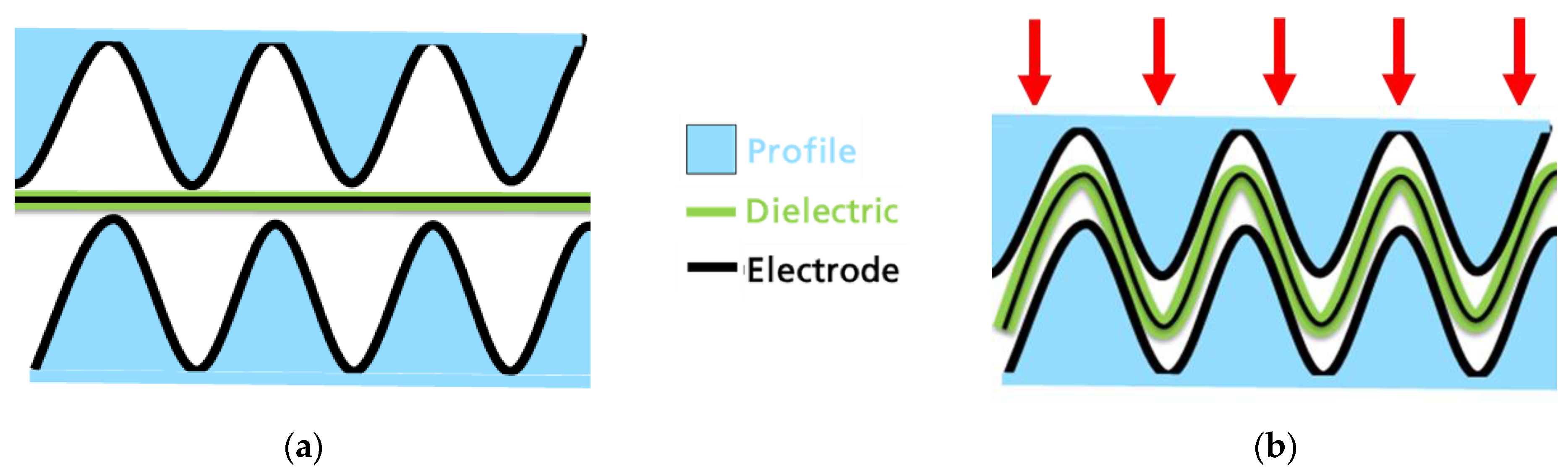
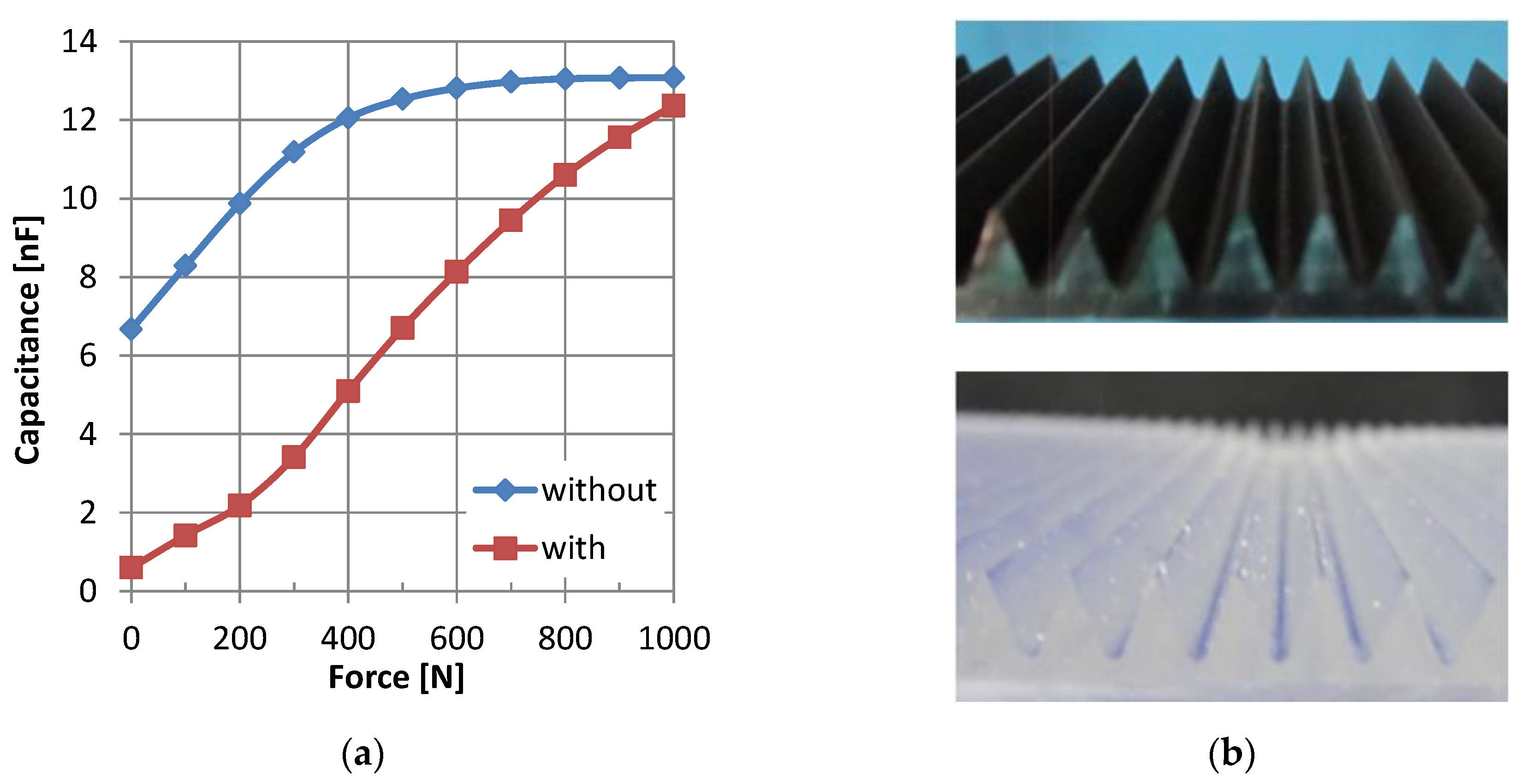
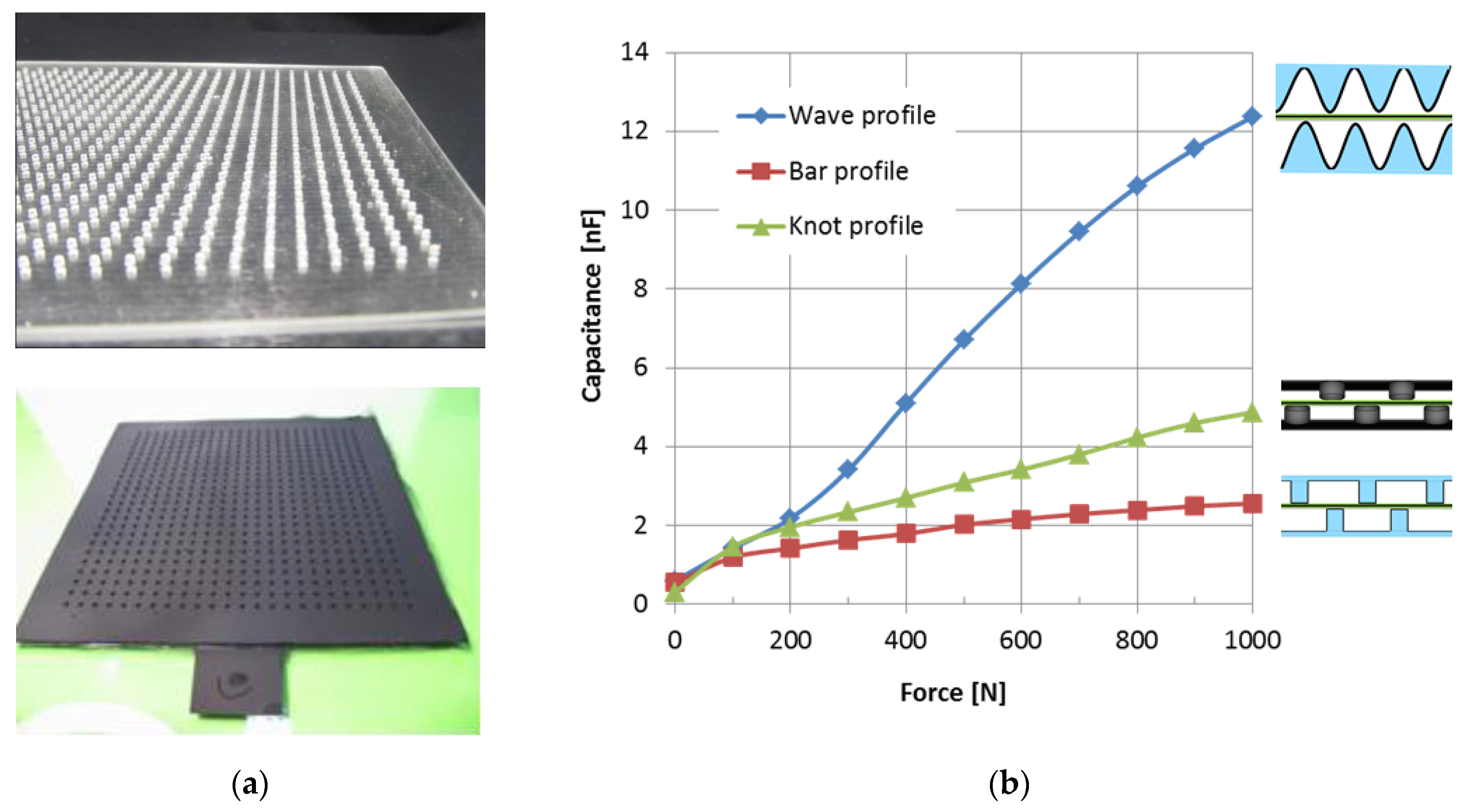
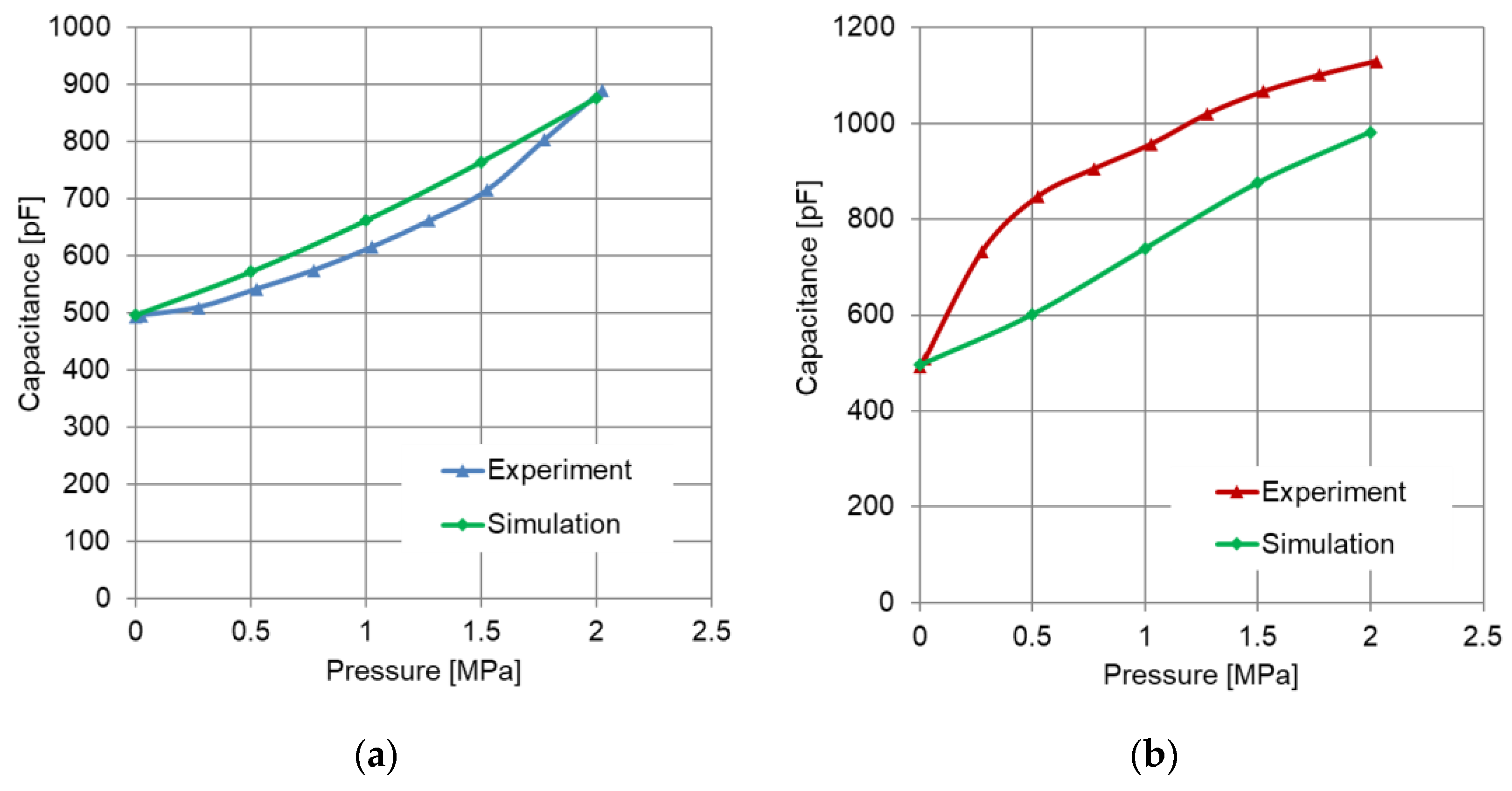
2.1. Advanced Pressure Sensors
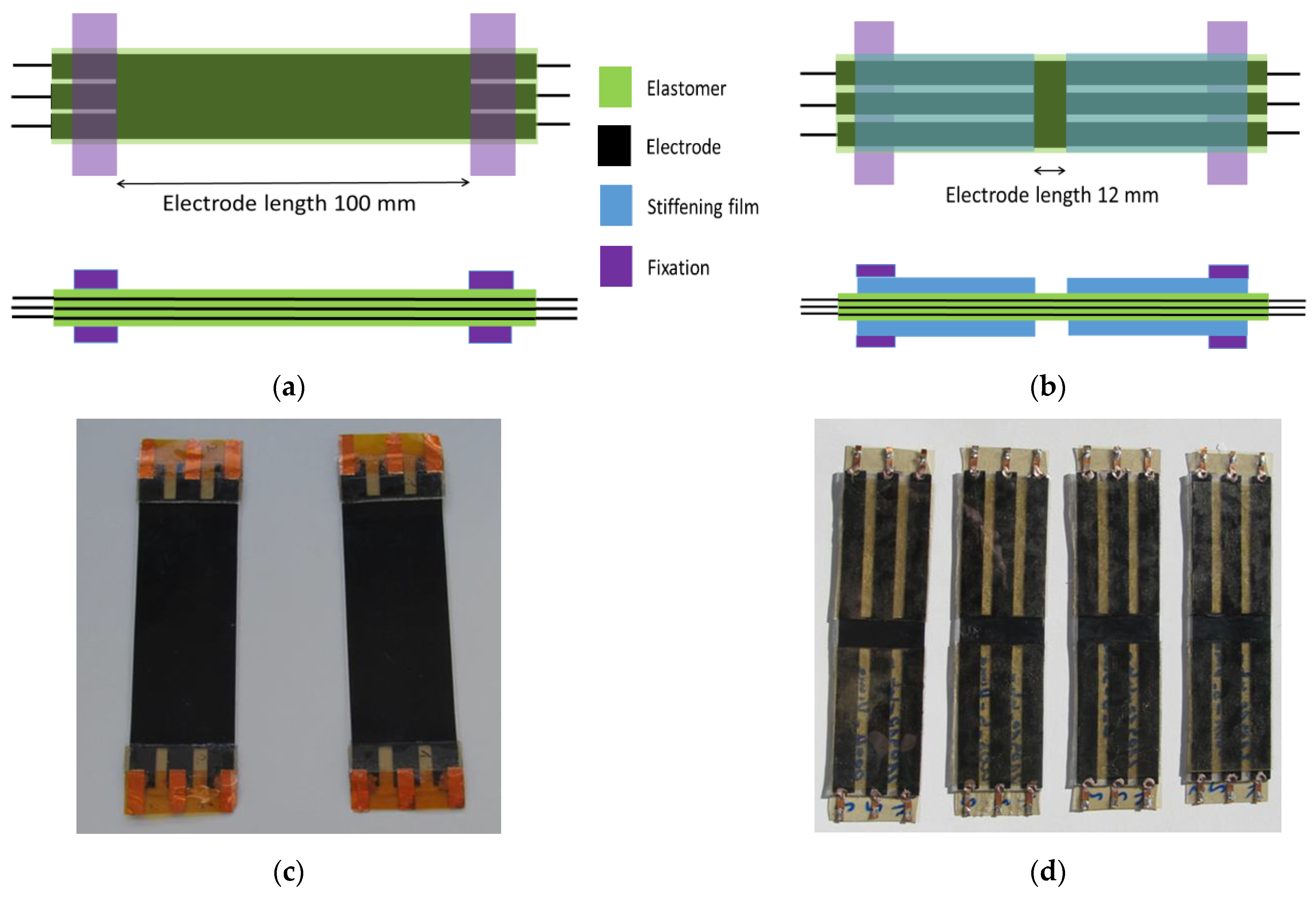
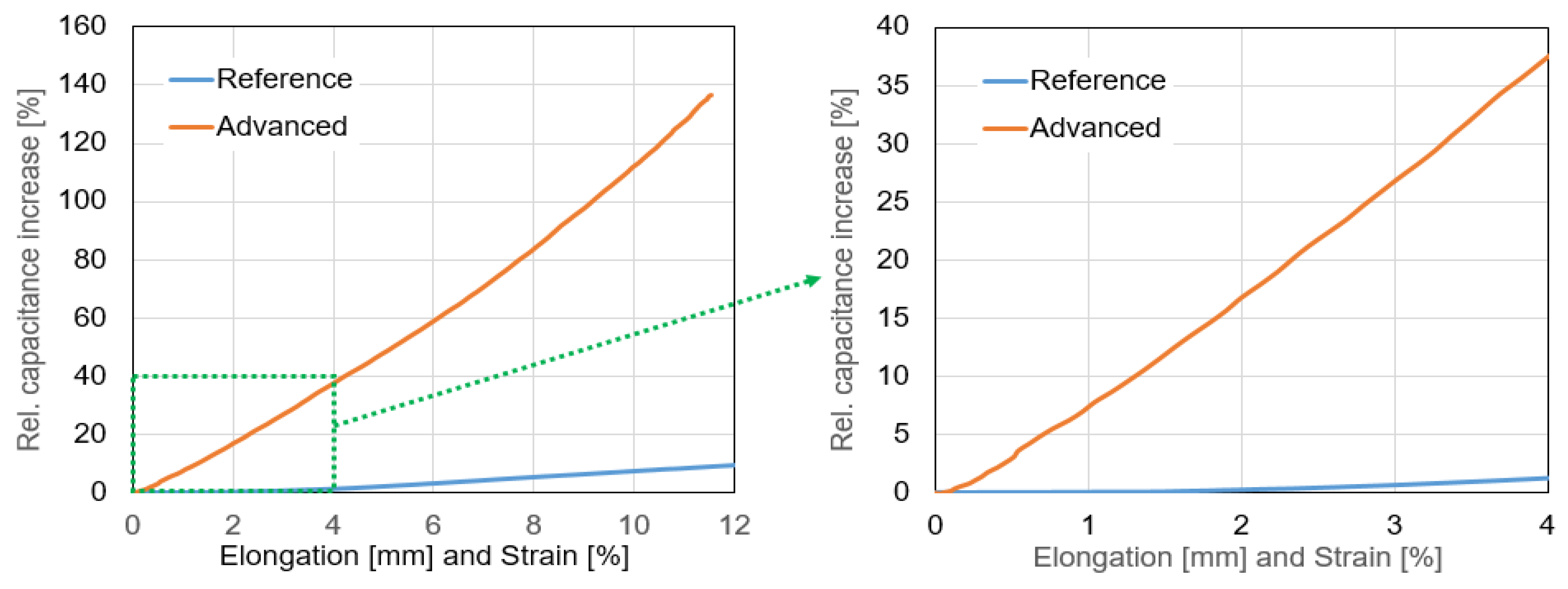
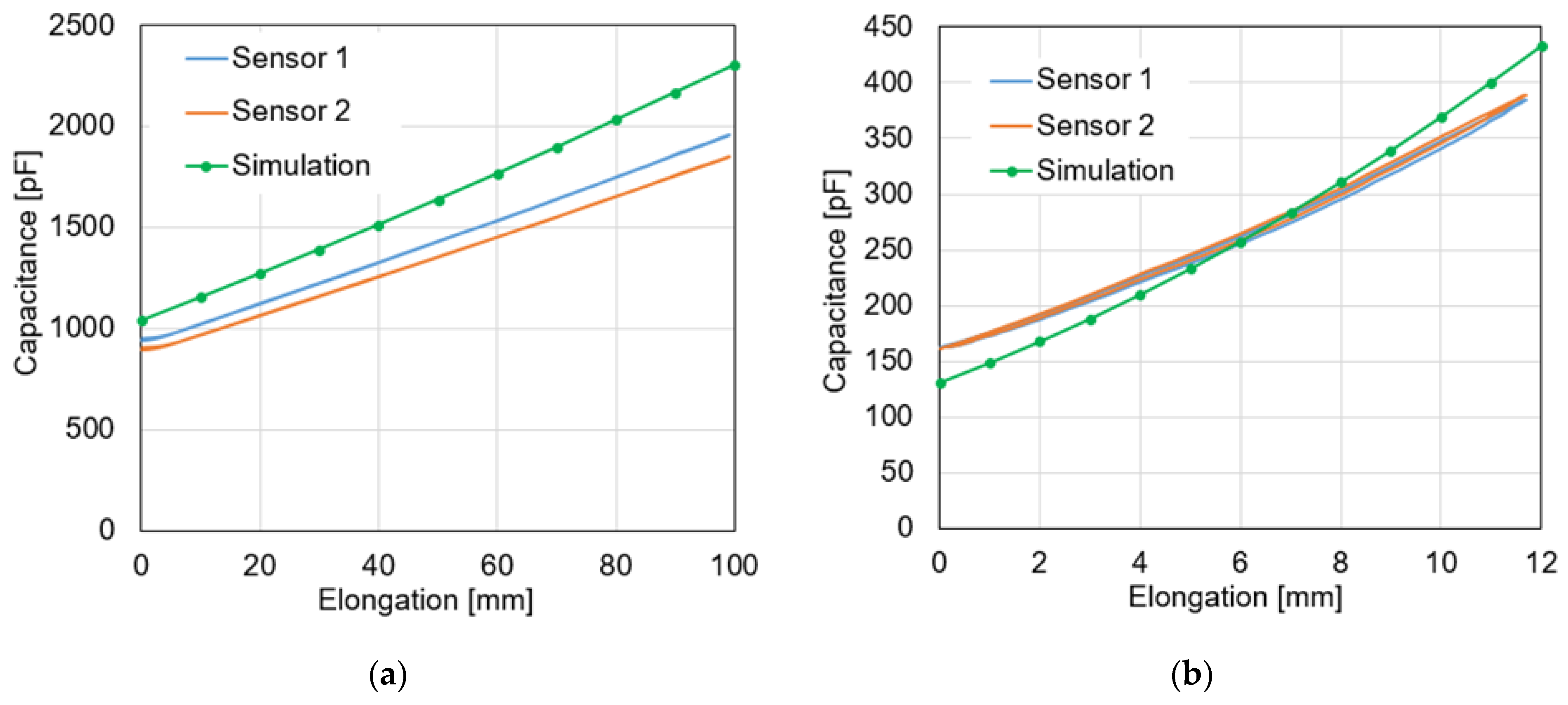
2.2. Advanced Strain Sensors
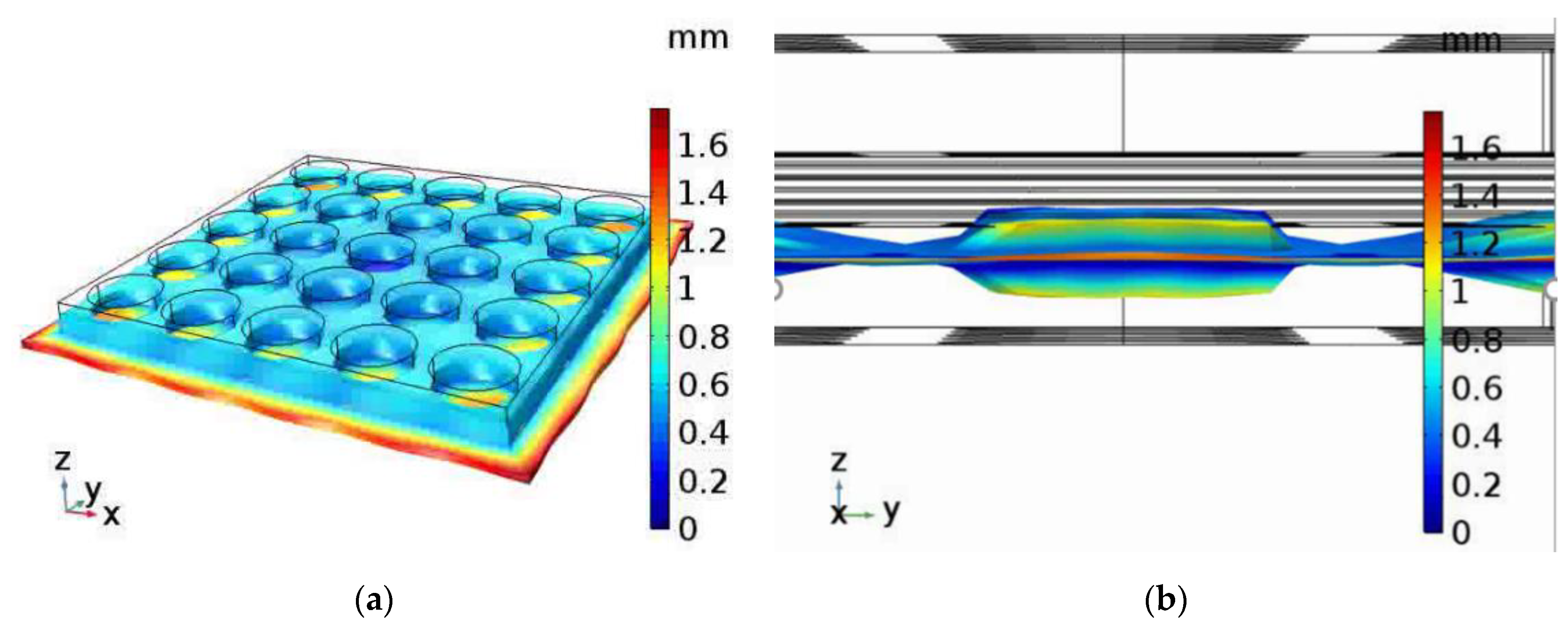
2.3. Simulation of Advanced Sensors
3. Applications of Advanced Dielectric Elastomer Sensors
3.1. Sensor Applications
- -
- Pressure sensors with an elevated pressure range for bridge mounts, engine mounts and other elastomer dampers;
- -
- Strain sensors with an enhanced measuring sensitivity for structural health monitoring of civil infrastructure such as bridges, large buildings as well as industrial facilities;
- -
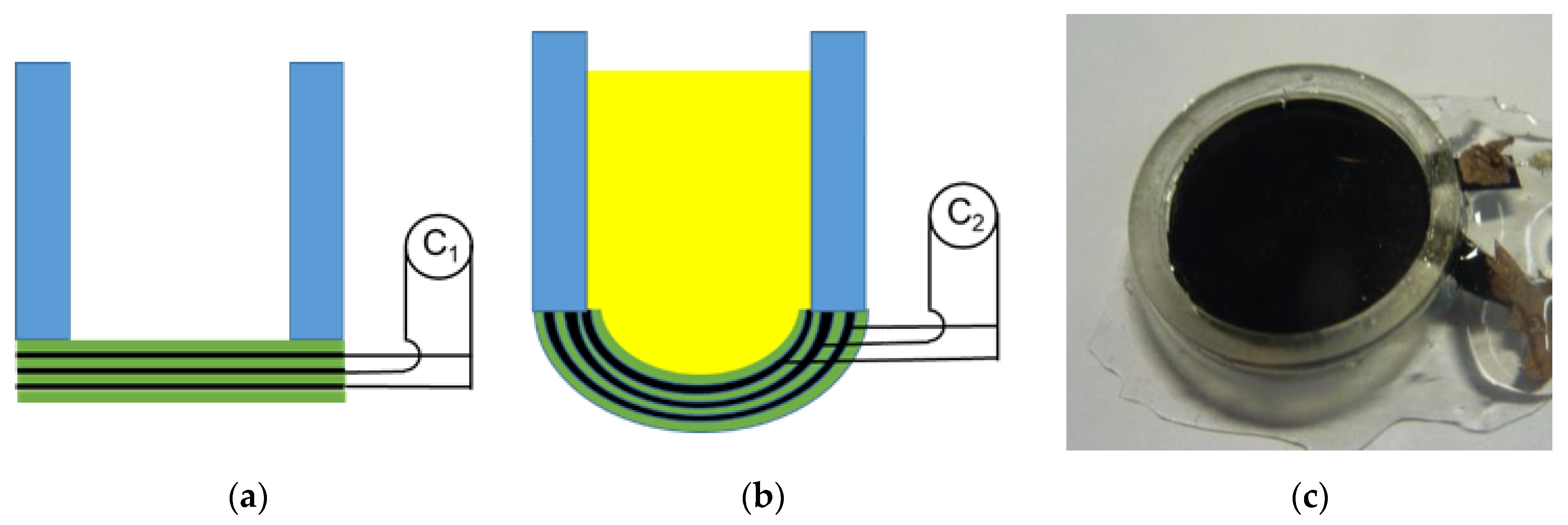
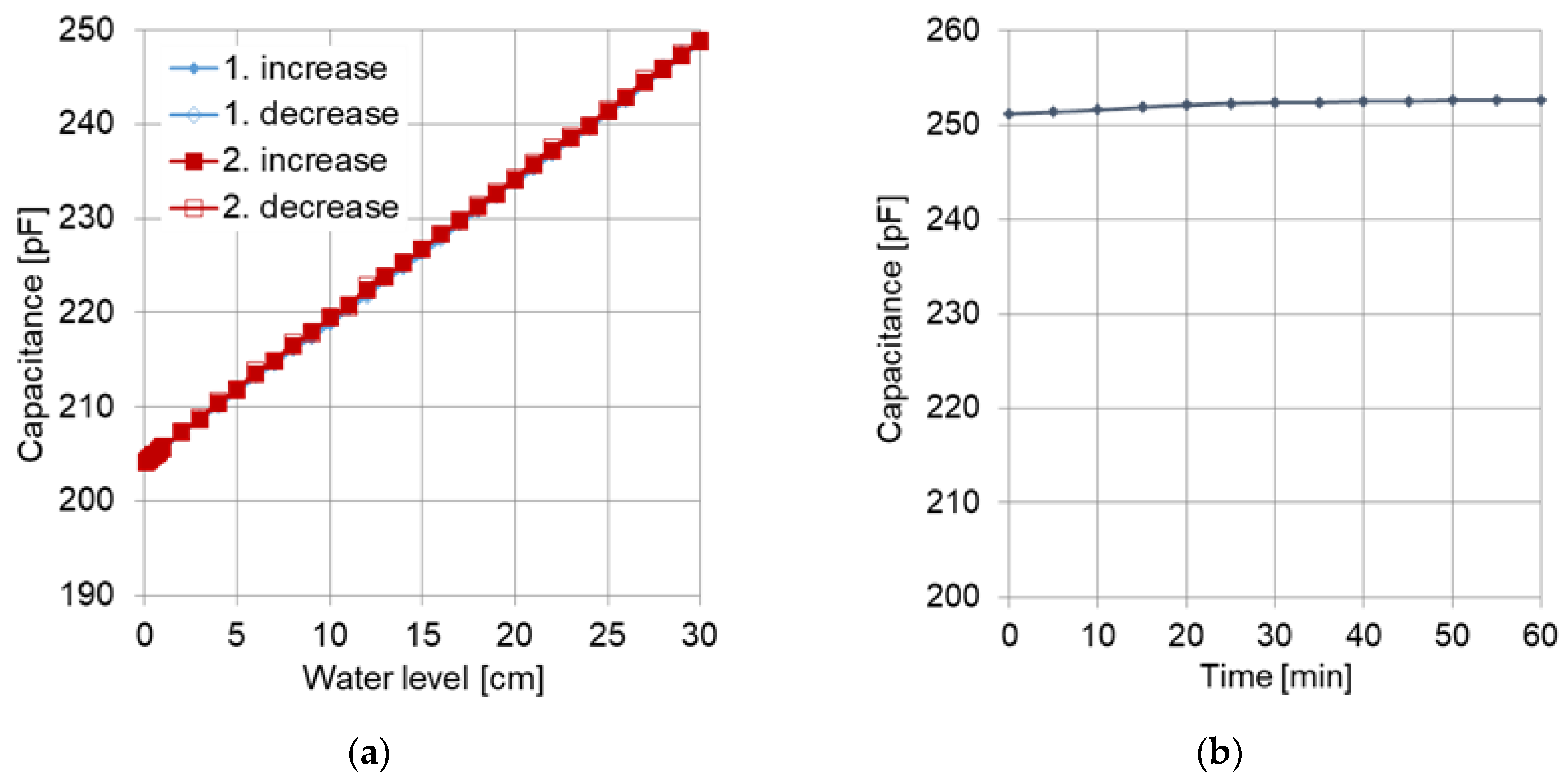
- Out-of-plane strain sensors for recording the filling level of liquid-containing systems such as tanks, containers, washing machines, dishwashers, etc.
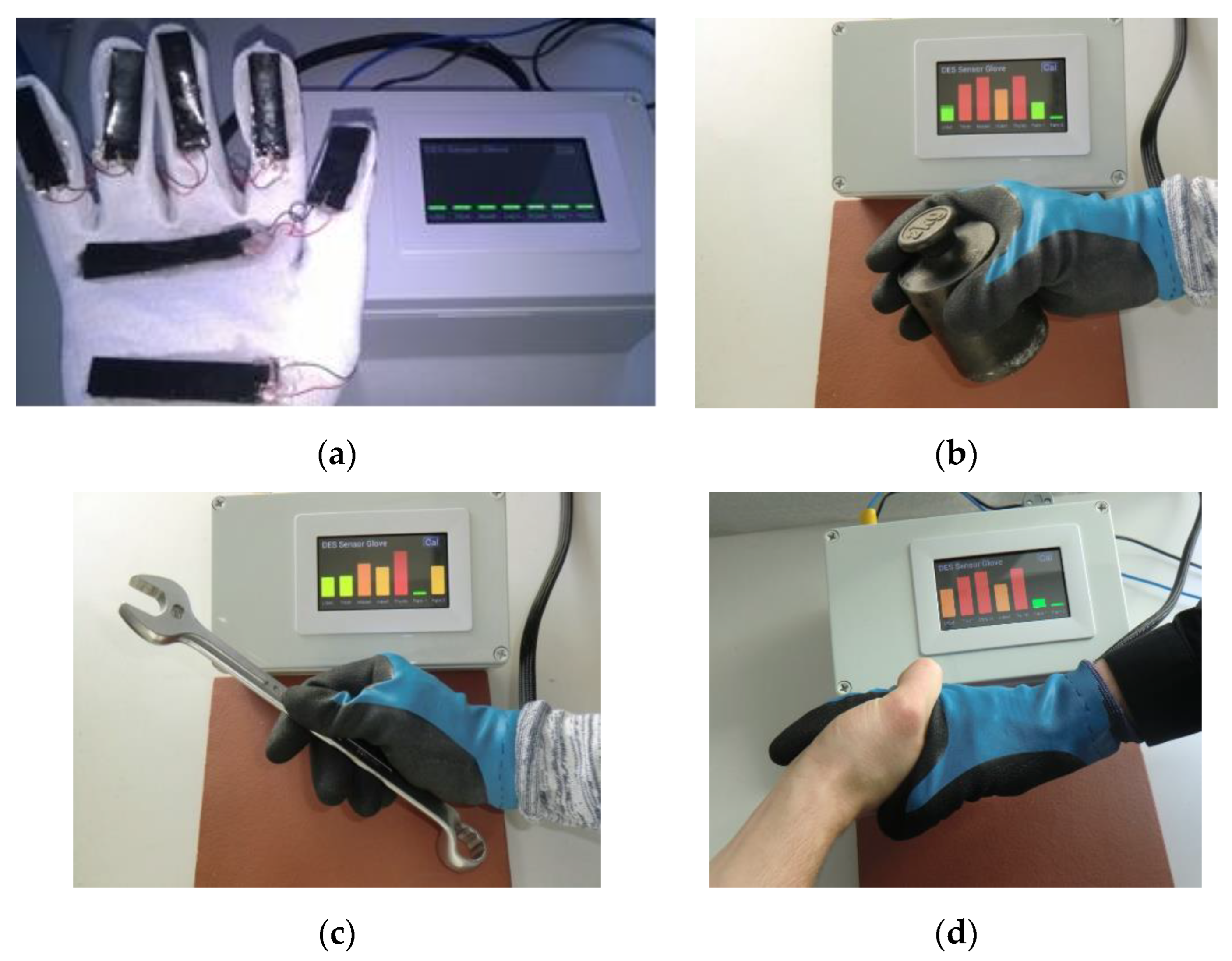
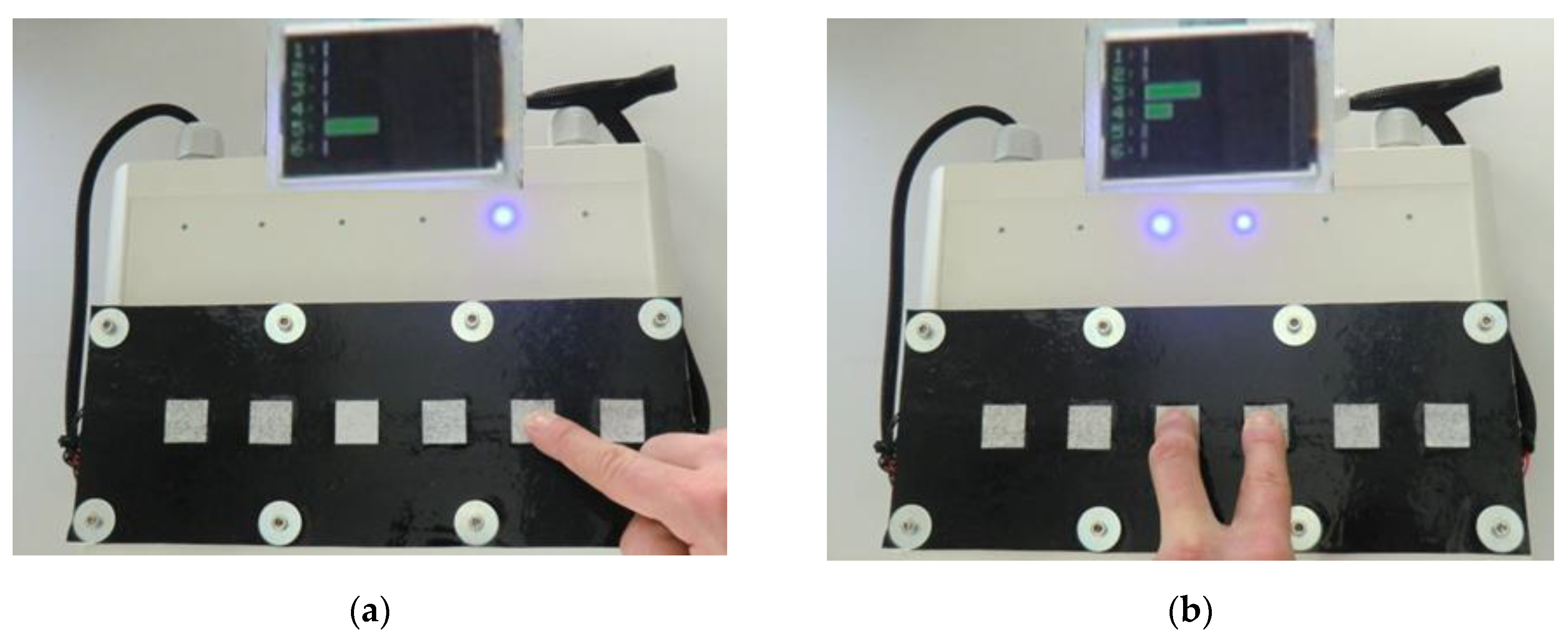
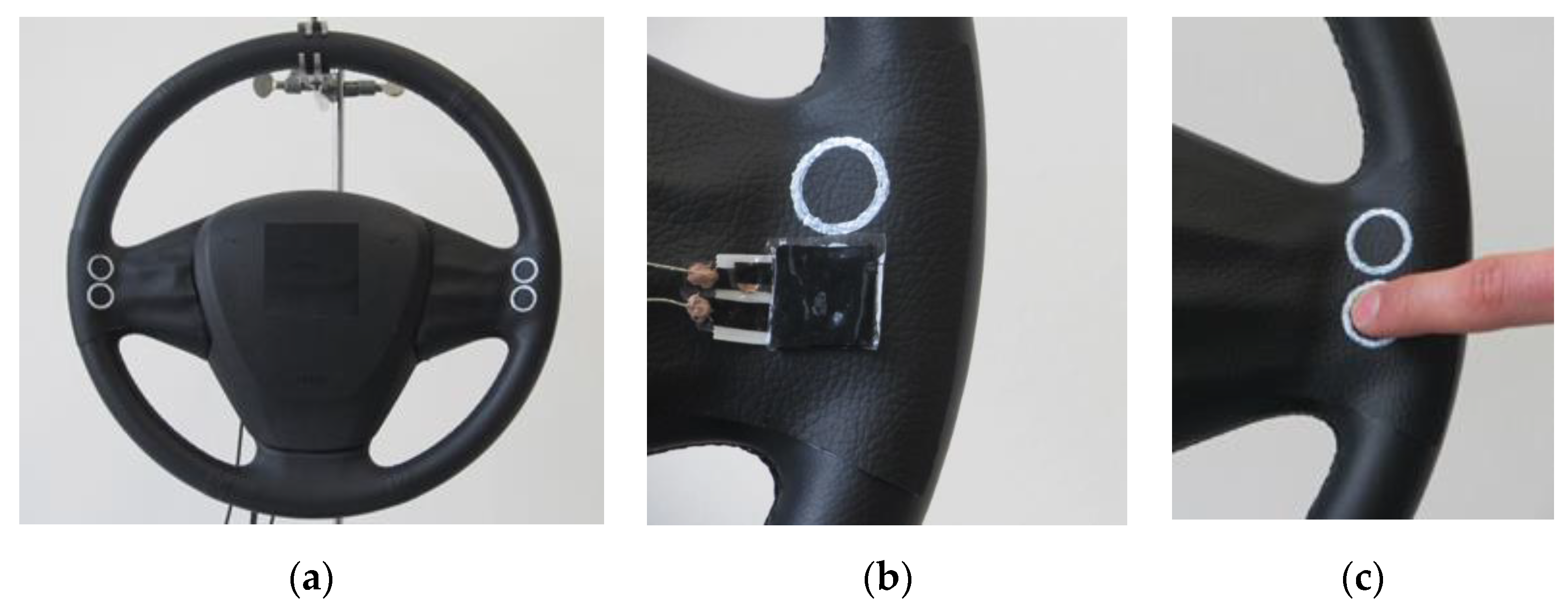
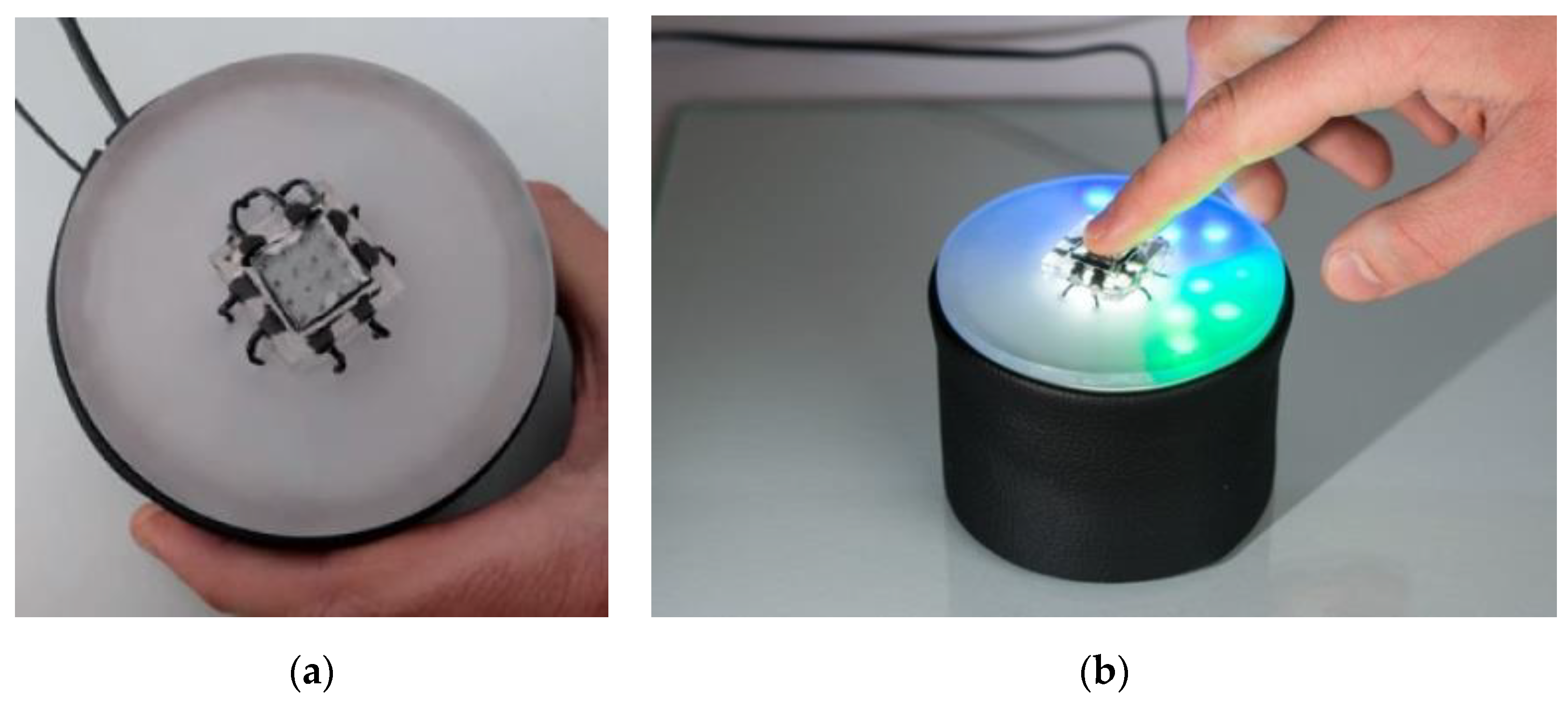
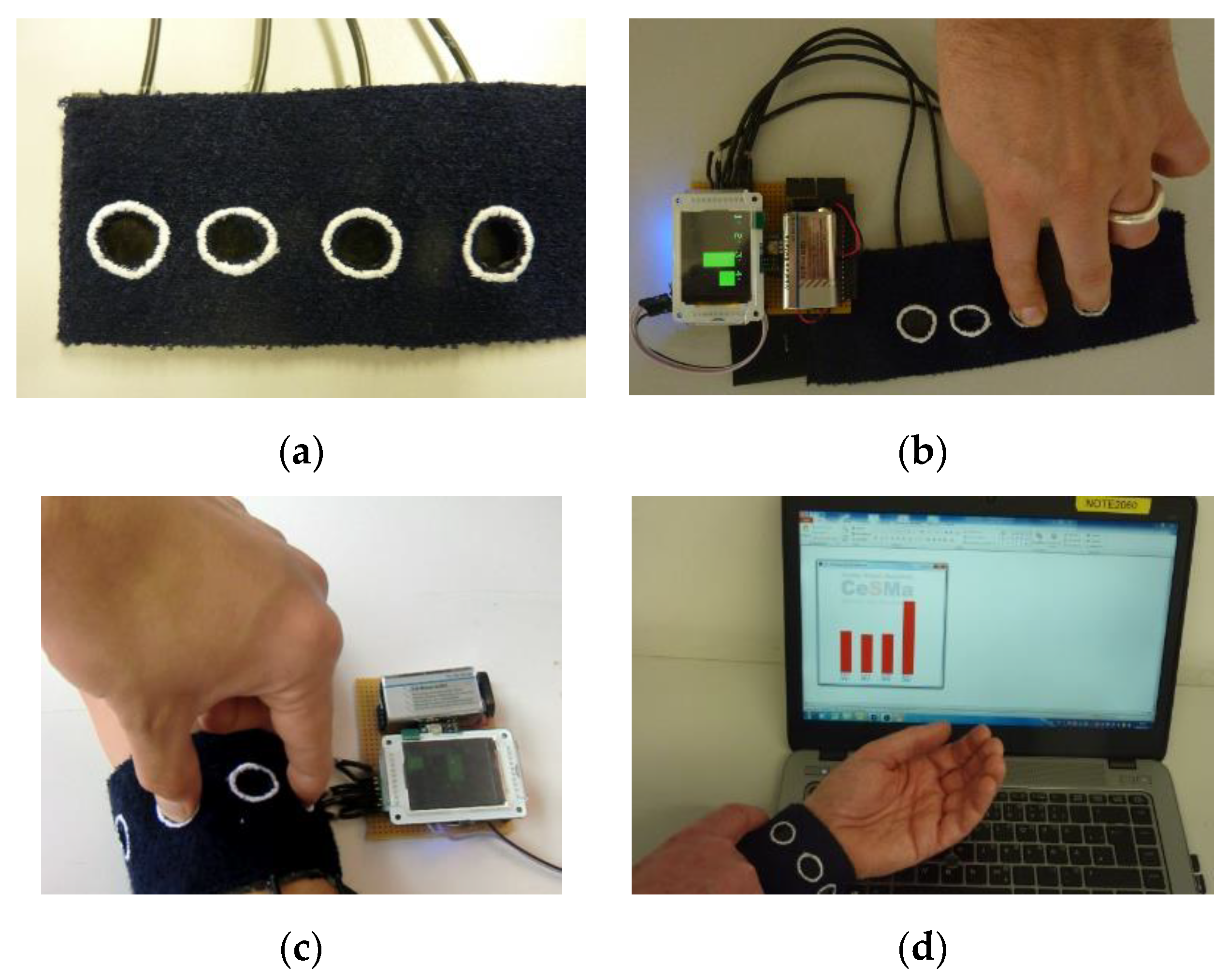
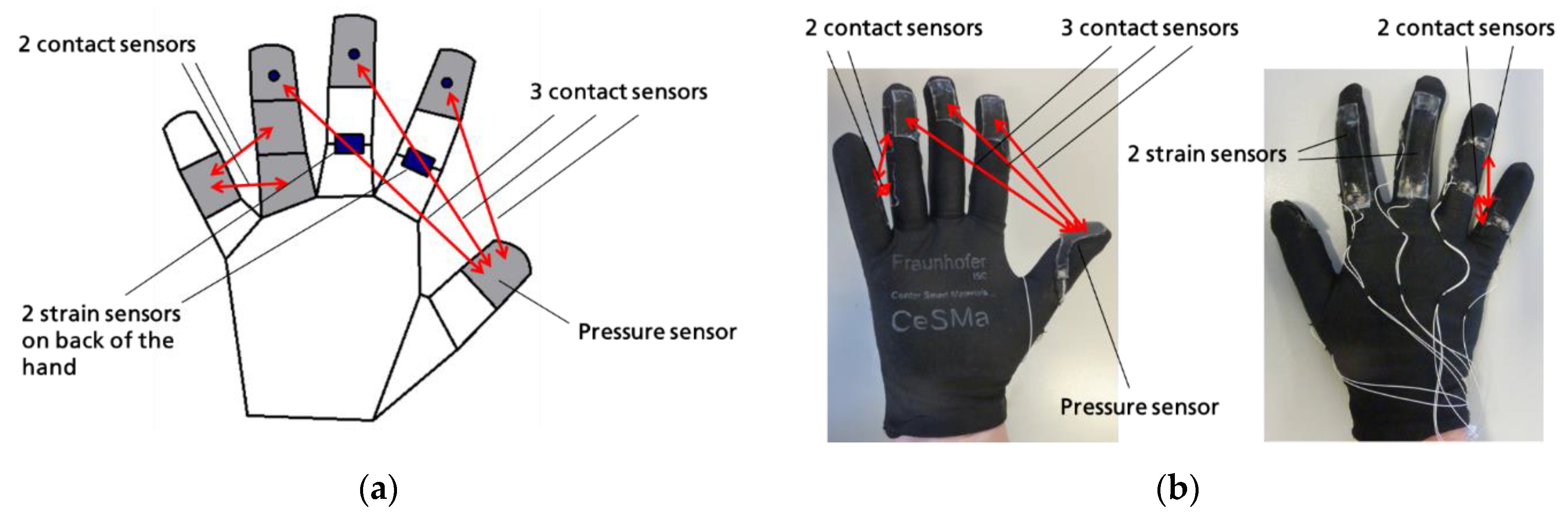
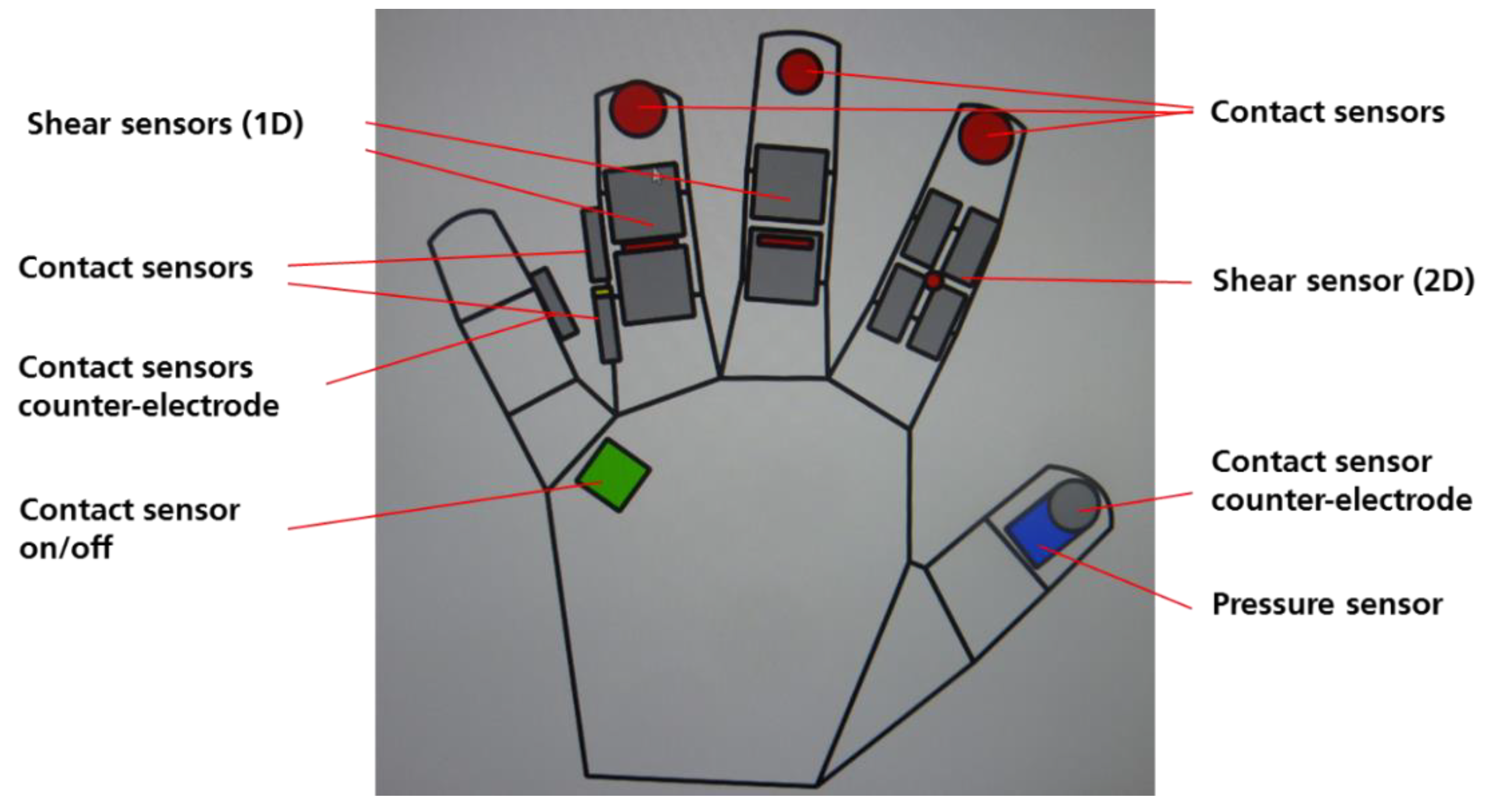
3.2. Human–Machine Interfaces
- -
- Two strain sensors on the backside of the index finger and the middle finger;
- -
- A pressure sensor on the thumb;
- -
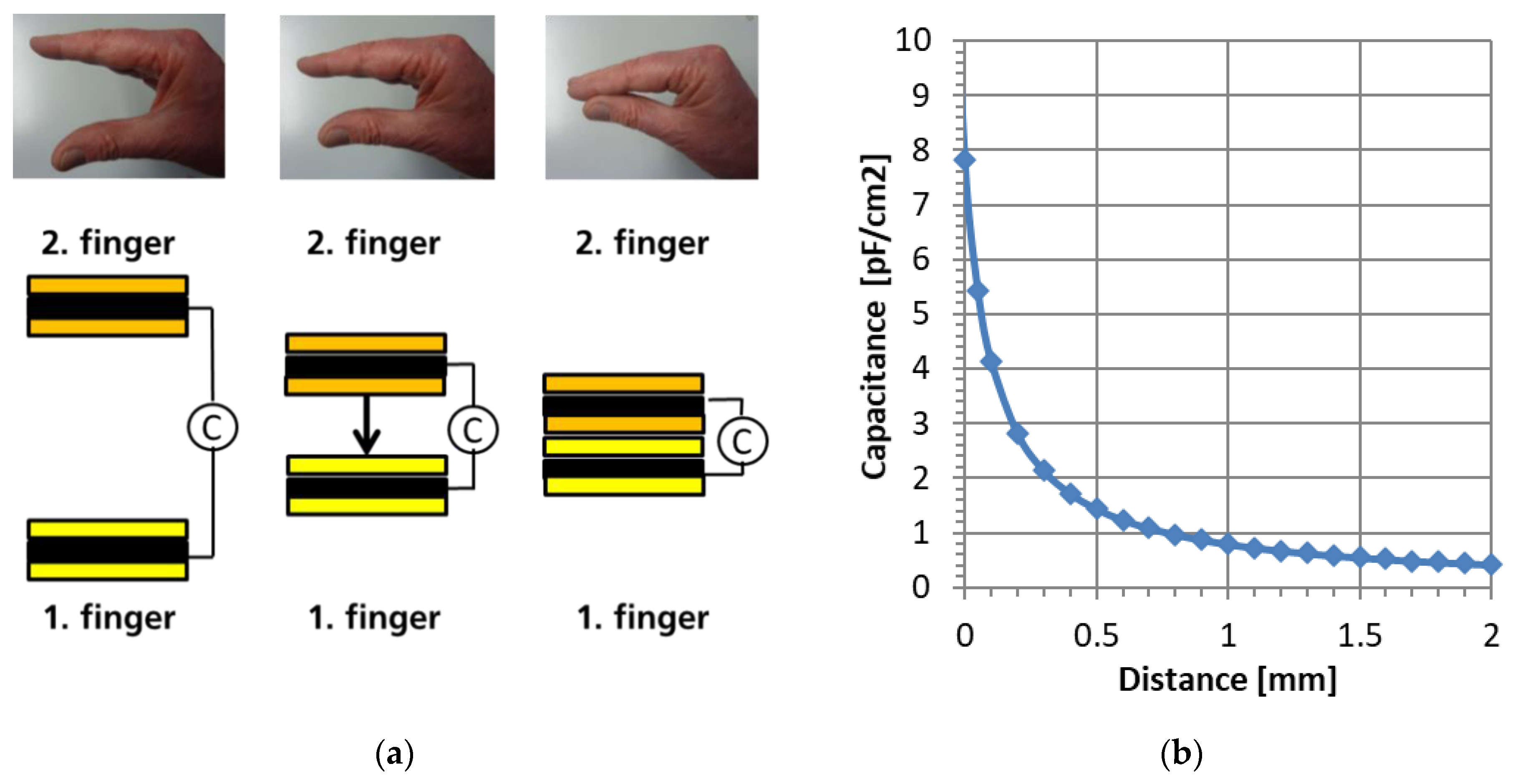
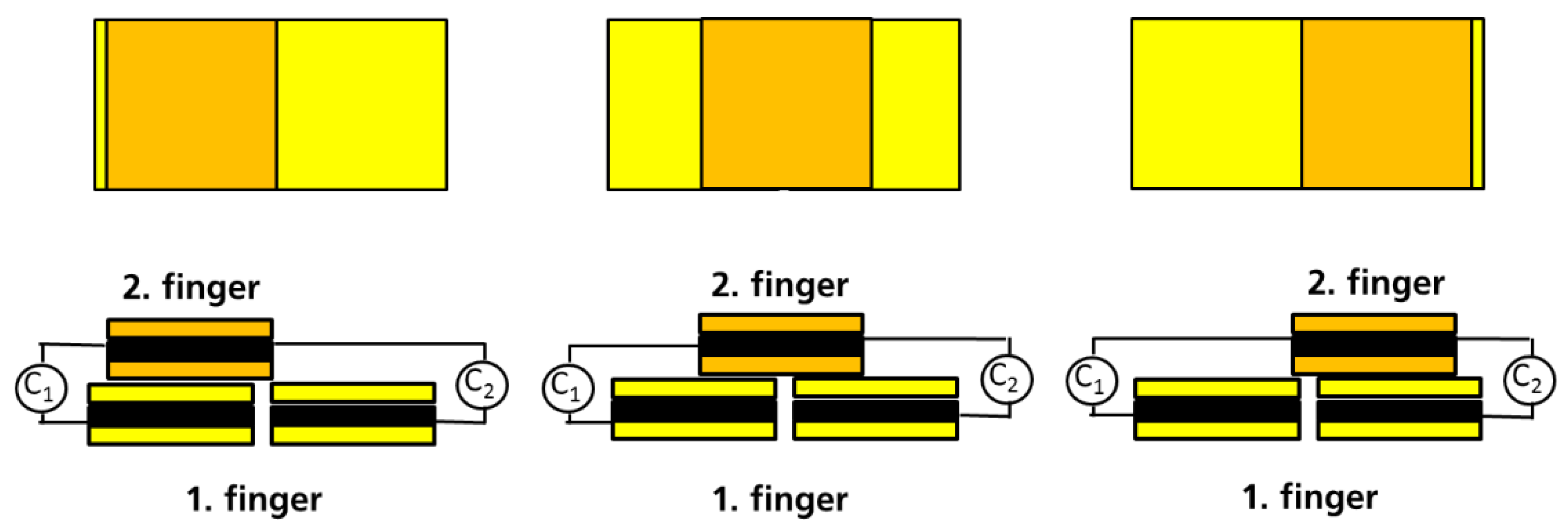
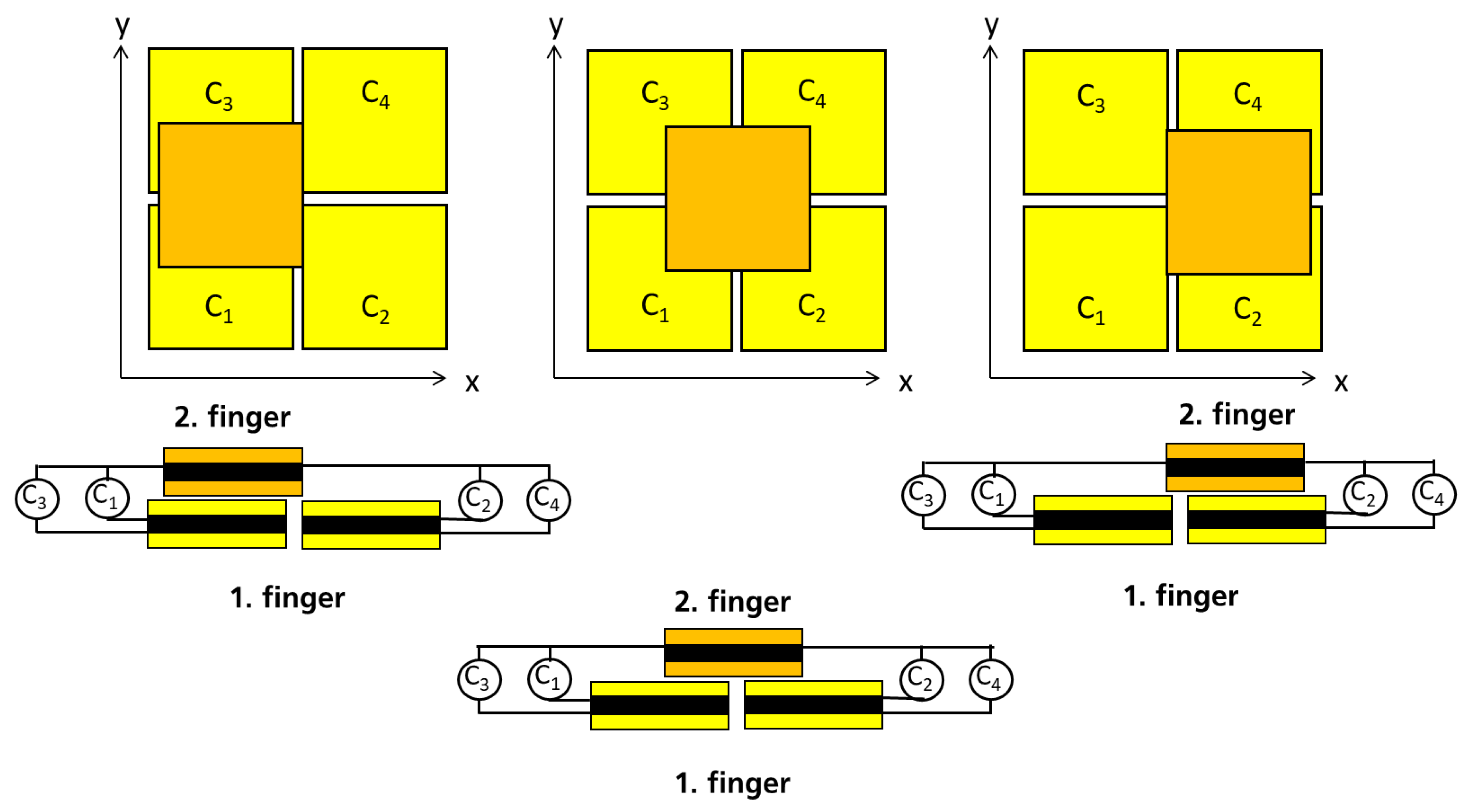
- Several contact sensors, which consist of two electrodes located on different fingers.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Carpi, F.; De Rossi, D.; Kornbluh, R.; Pelrine, R.; Sommer-Larsen, P. (Eds.) Dielectric Elastomers as Electromechanical Transducers; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar] [CrossRef]
- Romasanta, L.J.; Lopez-Manchado, M.A.; Verdejo, A. Increasing the performance of dielectric elastomer actuators: A review from the materials perspective. Prog. Polym. Sci. 2015, 51, 188–211. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Wang, Y.; McCoul, D.; Pei, Q.; Chen, H. Viscoelastic creep elimination in dielectric elastomer actuation by preprogrammed voltage. Appl. Phys. Lett. 2014, 105, 212904. [Google Scholar] [CrossRef]
- Madsen, F.B.; Daugaard, A.E.; Hvilsted, S.; Skov, A.L. The Current State of Silicone-Based Dielectric Elastomer Transducers. Macromol. Rapid Commun. 2016, 37, 378–413. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Böse, H.; Uhl, D.; Flittner, K.; Schlaak, H. Dielectric Elastomer Actuator with Enhanced Permittivity and Strain. Proc. SPIE 2011, 7976, 734–746. [Google Scholar]
- Kussmaul, B.; Risse, S.; Kofod, G.; Waché, R.; Wegener, M.; McCarthy, D.N.; Krüger, H.; Gerhard, R. Enhancement of dielectric permittivity and electromechanical response in silicone elastomers: Molecular grafting of organic dipoles to the macromolecular network. Adv. Funct. Mater. 2011, 21, 4589–4594. [Google Scholar] [CrossRef]
- Böse, H.; Uhl, D.; Rabindranath, R. Novel DEA with organically modified silicone elastomer for permittivity enhancement. Proc. SPIE 2012, 8340, 538–547. [Google Scholar]
- Sheima, Y.; von Szczepanski, J.; Danner, P.; Owusu, F.; Iacob, M.; Perju, E.; Nüesch, F.; Opris, D.M. High dielectric permittivity elastomers: Synthesis, processability, and device manufacturing. Proc. SPIE 2022, XXIV, PC120420Q. [Google Scholar]
- Shigemune, H.; Sugano, S.; Nishitani, J.; Yamauchi, M.; Hosoya, N.; Hashimoto, S.; Maeda, S. Dielectric Elastomer Actuators with Carbon Nanotube Electrodes Painted with a Soft Brush. Actuators 2018, 7, 51. [Google Scholar] [CrossRef] [Green Version]
- Böse, H.; Uhl, D. Dielectric elastomers with novel highly-conducting electrodes. Proc. SPIE 2013, 8687, 720–731. [Google Scholar]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J. High-speed electrically actuated elastomers with over 100% strain. Science 2000, 287, 836–839. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Joseph, J.; Heydt, R.; Pei, Q.; Chiba, S. High-field deformation of elastomeric dielectrics for actuators. Mater. Sci. Eng. C 2000, 11, 89–100. [Google Scholar] [CrossRef]
- O’Halloran, A.; O’Malley, F.; McHugh, P. A review on dielectric elastomer actuators, technology, applications, and challenges. J. Appl. Phys. 2008, 104, 071101. [Google Scholar] [CrossRef]
- Kovacs, G.; Düring, L.; Michel, S.; Terrasi, G. Stacked dielectric elastomer actuator for tensile force transmission. Sens. Actuators A 2009, 155, 299–307. [Google Scholar] [CrossRef]
- Kofod, G. The static actuation of dielectric elastomer actuators: How does pre-stretch improve actuation? J. Phys. D Appl. Phys. 2008, 41, 215405. [Google Scholar] [CrossRef]
- Bruch, D.; Willian, T.P.; Schäfer, H.C.; Motzki, P. Performance-Optimized Dielectric Elastomer Actuator System with Scalable Scissor Linkage Transmission. Actuators 2022, 11, 160. [Google Scholar] [CrossRef]
- Flittner, K.; Schlosser, M.; Schlaak, H.F. Dielectric elastomer stack actuators for integrated gas valves. Proc. SPIE 2011, 7976, 443–449. [Google Scholar]
- Giousouf, M.; Kovacs, G. Dielectric elastomer actuators used for pneumatic valve technology. Smart Mater. Struct. 2013, 22, 104010. [Google Scholar] [CrossRef]
- Linnebach, P.; Rizzello, G.; Seelecke, S. Design and validation of a dielectric elastomer membrane actuator driven pneumatic pump. Smart Mater. Struct. 2020, 29, 075021. [Google Scholar] [CrossRef]
- Heydt, R.P.; Kornbluh, R.; Eckerle, J.; Pelrine, R. Dielectric Elastomer Loudspeakers, [Dielectric Elastomers as Electromechanical Transducers]; Carpi, F., De Rossi, D., Kornbluh, R., Pelrine, R., Sommer-Larsen, P., Eds.; Elsevier: Amsterdam, The Netherlands, 2008; pp. 313–320. [Google Scholar]
- Carpi, F.; Frediani, G.; Turco, S.; De Rossi, D. Bioinspired Tunable Lens with Muscle-Like Electroactive Elastomers. Adv. Funct. Mater. 2011, 21, 4152–4158. [Google Scholar] [CrossRef]
- Shian, S.; Diebold, R.M.; Clarke, D.R. Tunable lenses using transparent dielectric elastomer actuators. Opt. Express 2013, 21, 8669–8676. [Google Scholar] [CrossRef]
- Giger, J.; Blum, M.; Aschwanden, M. Laser speckle reduction based on electroactive polymers. In Proceedings of the 1st Advanced Laser and Photon Sources (ALPS’12), Yokohama, Japan, 26–27 April 2012. [Google Scholar]
- Shintake, J.; Rosset, S.; Schubert, B.; Floreano, D.; Shea, H. Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators. Adv. Mater. 2016, 28, 231–238. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Liu, L.; Liu, Y.; Leng, J. Review of Dielectric Elastomer Actuators and Their Applications in Soft Robots. Adv. Intell. Syst. 2021, 3, 2000282. [Google Scholar] [CrossRef]
- Matysek, M.; Lotz, P.; Schlaak, H.F. Braille display with dielectric polymer actuator. In Proceedings of the 10th International Conference on New Actuators, Bremen, Germany, 14–16 June 2006; pp. 997–1000. [Google Scholar]
- Di, K.; Bao, K.; Chen, H.; Xie, X.; Tan, J.; Shao, X.; Li, Y.; Xia, W.; Xu, Z.; E, S. Dielectric Elastomer Generator for Electromechanical Energy Conversion: A Mini Review. Sustainability 2021, 13, 9881. [Google Scholar] [CrossRef]
- Koh, A.; Keplinger, C.; Li, T.; Bauer, S.; Suo, Z. Dielectric elastomer generators: How much energy can be converted? IEEE/ASME Trans. Mechatron. 2011, 16, 33–41. [Google Scholar] [CrossRef]
- Chiba, S.; Waki, M.; Kornbluh, R.; Pelrine, R. Current status and future prospects of power generators using dielectric elastomers. Smart Mater. Struct. 2011, 20, 124006. [Google Scholar] [CrossRef]
- McKay, T.G.; Rosset, S.; Anderson, I.A.; Shea, H. Dielectric elastomer generators that stack up. Smart Mater. Struct. 2015, 24, 015014. [Google Scholar] [CrossRef]
- Vertechy, R.; Montana, M.; Rosati Papini, G.P.; Forehand, D. In-tank tests of a dielectric elastomer generator for wave energy harvesting. Proc. SPIE 2014, 9056, 332–342. [Google Scholar]
- Kornbluh, R.; Pelrine, R.; Prahlad, H.; Wong-Foy, A.; McCoy, B.; Kim, S.; Eckerly, J.; Low, T. From boots to buoys: Promises and challenges of dielectric elastomer energy harvesting. Proc. SPIE 2011, 7976, 67–93. [Google Scholar]
- Son, S.; Goulbourne, N.C. Finite Deformations of Tubular Dielectric Elastomer Sensors. J. Intell. Mat. Syst. Struct. 2009, 20, 2187–2199. [Google Scholar] [CrossRef]
- Xu, D.; McKay, T.G.; Michel, S.; Anderson, I.A. Enabling large scale capacitive sensing for dielectric elastomers. Proc. SPIE 2014, 9056, 269–276. [Google Scholar]
- Rosenthal, M.; Bonwit, N.; Duncheon, C.; Heim, J. Applications of dielectric elastomer EPAM sensors. Proc. SPIE 2007, 6524, 410–416. [Google Scholar]
- Ni, N.; Zhang, L. Dielectric Elastomer Sensors; IntechOpen: London, UK, 2017. [Google Scholar] [CrossRef] [Green Version]
- Bae, J.-H.; Chang, S.-H. PVDF-based ferroelectric polymers and dielectric elastomers for sensor and actuator applications: A review. Funct. Compos. Struct. 2019, 1, 012003. [Google Scholar] [CrossRef]
- Zhao, Y.; Yin, L.-J.; Zhong, S.-L.; Zha, J.-W.; Dang, Z.-M. Review of dielectric elastomers for actuators, generators and sensors. IET Nanodielectr. 2020, 3, 99–106. [Google Scholar] [CrossRef]
- Rizzello, G. A Review of Cooperative Actuator and Sensor Systems Based on Dielectric Elastomer Transducers. Actuators 2023, 12, 46. [Google Scholar] [CrossRef]
- Hoffstadt, T.; Griese, M.; Maas, J. Identification of the mechanical state of DEAP transducers based on integrated DEAP sensors. Proc. SPIE 2014, 9056, 277–288. [Google Scholar]
- Gisby, T.A.; O’Brien, B.M.; Anderson, I.A. Self sensing feedback for dielectric elastomer actuators. Appl. Phys. Lett. 2013, 102, 193703. [Google Scholar] [CrossRef]
- Rizzello, G.; Naso, D.; York, A.; Seelecke, S. Closed loop control of dielectric elastomer actuators based on self-sensing displacement feedback. Smart Mater. Struct. 2016, 25, 035034. [Google Scholar] [CrossRef]
- Jung, K.; Kim, K.J.; Choi, H.R. A self-sensing dielectric elastomer actuator. Sens. Actuators A 2008, 143, 343–351. [Google Scholar] [CrossRef]
- Rosset, S.; O’Brien, B.M.; Gisby, T.; Xu, D.; Shea, H.R.; Anderson, I.A. Self-sensing dielectric elastomer actuators in closed-loop operation. Smart Mater. Struct. 2013, 22, 104018. [Google Scholar] [CrossRef] [Green Version]
- Chuc, N.H.; Thuy, D.V.; Park, J.; Kim, D.; Koo, J.; Lee, Y.; Nam, J.D.; Choi, H.R. A dielectric elastomer actuator with self-sensing capability. Proc. SPIE 2008, 6927, 260–267. [Google Scholar]
- Matysek, M.; Haus, H.; Moessinger, H.; Brokken, D.; Lotz, P.; Schlaak, H.F. Combined Driving and Sensing Circuitry for Dielectric Elastomer Actuators in mobile applications. Proc. SPIE 2011, 7976, 314–324. [Google Scholar]
- Gisby, T.; Xie, S.; Calius, E.; Anderson, I. Integrated sensing and actuation of muscle-like actuators. Proc. SPIE 2009, 7287, 72–83. [Google Scholar]
- Ye, Z.; Chen, Z. Self-sensing of dielectric elastomer actuator enhanced by artificial neural network. Smart Mater. Struct. 2017, 26, 095056. [Google Scholar] [CrossRef]
- Rizzello, G.; Naso, D.; York, A.; Seelecke, S. A Self-Sensing Approach for Dielectric Elastomer Actuators Based on Online Estimation Algorithms. IEEE/ASME Trans. Mechatron. 2017, 22, 728–738. [Google Scholar] [CrossRef]
- Rizzello, G.; Fugaro, F.; Naso, D.; Seelecke, S. Simultaneous Self-Sensing of Displacement and Force for Soft Dielectric Elastomer Actuators. IEEE Robot. Autom. Lett. 2018, 3, 1230–1236. [Google Scholar] [CrossRef]
- Rizzello, G.; Serafino, P.; Naso, D.; Seelecke, S. Towards Sensorless Soft Robotics: Self-Sensing Stiffness Control of Dielectric Elastomer Actuators. IEEE Trans. Robot. 2020, 36, 174–188. [Google Scholar] [CrossRef]
- Zhang, R.; Iravani, P.; Keogh, P. Closed loop control of force operation in a novel self-sensing dielectric elastomer actuator. Sens. Actuators A 2017, 264, 123–132. [Google Scholar] [CrossRef] [Green Version]
- Fasolt, B.; Hodgins, M.; Rizzello, G.; Seelecke, S. Effect of screen printing parameters on sensor and actuator performance of dielectric elastomer (DE) membranes. Sens. Actuators A 2017, 265, 10–19. [Google Scholar] [CrossRef]
- Araromi, O.A.; Rosset, S.; Shea, H.R. High-resolution, large-area fabrication of compliant electrodes via laser ablation for robust, stretchable dielectric elastomer actuators and sensors. ACS Appl. Mater. Interfaces 2015, 7, 18046–18053. [Google Scholar] [CrossRef]
- Xu, D.; Gisby, T.A.; Xie, S.; Anderson, I.A. Scalable sensing electronics towards a motion capture suit. Proc. SPIE 2013, 8687, 697–703. [Google Scholar]
- O’Brien, B.; Gisby, T.; Anderson, I.A. Stretch sensors for human body motion. Proc. SPIE 2014, 9056, 254–262. [Google Scholar]
- Huang, B.; Li, M.; Mei, T.; McCoul, D.; Qin, S.; Zhao, Z.; Zhao, J. Wearable Stretch Sensors for Motion Measurement of the Wrist Joint Based on Dielectric Elastomers. Sensors 2017, 17, 2708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Walker, C.; Anderson, I. Monitoring diver kinematics with dielectric elastomer sensors. Proc. SPIE 2017, 10163, 11–21. [Google Scholar]
- Walker, C.; Anderson, I. From land to water: Bringing dielectric elastomer sensing to the underwater realm. Proc. SPIE 2016, 9798, 443–450. [Google Scholar]
- Larson, C.; Spjut, J.; Knepper, R.; Shepherd, R. A Deformable Interface for Human Touch Recognition using Stretchable Carbon Nanotube Dielectric Elastomer Sensors and Deep Neural Networks. Soft Robot. 2019, 6, 611–620. [Google Scholar] [CrossRef]
- Xu, D.; Tairych, A.; Anderson, I.A. Where the Rubber Meets the Hand: Unlocking the Sensing Potential of Dielectric Elastomers. J. Polym. Sci. Part B Polym. Phys. 2016, 54, 465–472. [Google Scholar] [CrossRef]
- Available online: http://www.stretchsense.com (accessed on 7 March 2023).
- Available online: https://leaptechnology.com (accessed on 7 March 2023).
- Available online: https://promo.parker.com/promotionsite/flexsense/us/en/home (accessed on 7 March 2023).
- Orbaugh Antillon, D.W.; Walker, C.; Rosset, S.; Anderson, I.A. The challenges of hand gesture recognition using dielectric elastomer sensors. Proc. SPIE 2020, 11375, 231–241. [Google Scholar]
- Orbaugh, D.; Walker, C.; Rosset, S.; Anderson, I. Jumping into virtual reality with dielectric elastomer sensors. Proc. SPIE 2021, 11587, 17–31. [Google Scholar]
- Loew, P.; Rizzello, G.; Seelecke, S. Pressure monitoring inside a polymer tube based on a dielectric elastomer membrane sensor. Proc. SPIE 2018, 10594, 324–331. [Google Scholar]
- Laflamme, S.; Kollosche, M.; Connor, J.J.; Kofod, G. Soft capacitive sensor for structural health monitoring of large-scale systems. Struct. Control Health Monit. 2012, 19, 70–81. [Google Scholar] [CrossRef]
- Yan, J.; Downey, A.; Cancelli, A.; Laflamme, S.; Chen, A.; Li, J.; Ubertini, F. Concrete Crack Detection and Monitoring Using a Capacitive Dense Sensor Array. Sensors 2019, 19, 1843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Son, S.; Goulbourne, N.C. Dynamic response of tubular dielectric elastomer transducers. Int. J. Solids Struct. 2010, 47, 2672–2679. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Kaaya, T.; Chen, Z. Self-sensing of dielectric elastomer tubular actuator with feedback control validation. Smart Mater. Struct. 2020, 29, 075037. [Google Scholar] [CrossRef]
- Goulbourne, N.; Son, S.; Fox, J. Self-sensing McKibben actuators using dielectric elastomer sensors. Proc. SPIE 2007, 6524, 295–306. [Google Scholar]
- Kanno, R.; Watanabe, S.; Shimizu, K.; Shintake, J. Self-Sensing McKibben Artificial Muscles Embedded with Dielectric Elastomer Sensor. IEEE Robot. Autom. Lett. 2021, 6, 6274–6280. [Google Scholar] [CrossRef]
- Kofod, G.; Stoyanov, H.; Gerhard, R. Multilayer coaxial fiber dielectric elastomers for actuation and sensing. Appl. Phys. A 2011, 102, 577–581. [Google Scholar] [CrossRef]
- Girard, A.; Bigúe, J.-P.L.; O’Brien, B.M.; Gisby, T.A.; Anderson, I.A.; Plante, J.-S. Soft Two-Degree-of-Freedom Dielectric Elastomer Position Sensor Exhibiting Linear Behavior. IEEE/ASME Trans. Mechatron. 2015, 20, 105–114. [Google Scholar] [CrossRef]
- Kim, D.; Lee, C.H.; Kim, B.C.; Lee, D.H.; Lee, H.S.; Nguyen, C.T.; Kim, U.K.; Nguyen, T.D.; Moon, H.; Koo, J.C.; et al. Six-axis capacitive force/torque sensor based on dielectric elastomer. Proc. SPIE 2013, 8687, 688–696. [Google Scholar]
- Hu, X.; Yang, F.; Wu, M.; Sui, Y.; Guo, D.; Li, M.; Kang, Z.; Sun, J.; Liu, J. A Super-Stretchable and Highly Sensitive Carbon Nanotube Capacitive Strain Sensor for Wearable Applications and Soft Robotics. Adv. Mater. Technol. 2021, 7, 2100769. [Google Scholar] [CrossRef]
- Deng, C. High-performance capacitive strain sensors with highly stretchable vertical graphene electrodes. J. Mater. Chem. C 2020, 8, 5541. [Google Scholar] [CrossRef]
- Dong, T.; Gu, Y.; Liu, T.; Pecht, M. Resistive and capacitive strain sensors based on customized compliant electrode: Comparison and their wearable applications. Sens. Actuators A Phys. 2021, 326, 112720. [Google Scholar] [CrossRef]
- Tao, Y.-D.; Gu, G.-Y.; Zhu, L.-M. Design and performance testing of a dielectric elastomer strain sensor. Int. J. Intell. Robot Appl. 2017, 1, 451–458. [Google Scholar] [CrossRef]
- Shintake, J.; Nagai, T.; Ogishima, K. Sensitivity Improvement of Highly Stretchable Capacitive Strain Sensors by Hierarchical Auxetic Structures. Front. Robot. AI 2019, 6, 127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, H.; Laflamme, S.; Li, J.; Bennett, C.; Collins, W.; Downey, A.; Jo, H. Experimental Validation of Textured Sensing Skin for Fatigue Crack Monitoring. Proc. SPIE 2021, 11591, 345–351. [Google Scholar]
- Zhu, Y.; Tairych, A. Using a flexible substrate to enhance the sensitivity of dielectric elastomer force sensors. Sens. Actuators A Phys. 2021, 332, 113167. [Google Scholar] [CrossRef]
- Liu, J.; Mao, G.; Huang, X.; Zou, Z.; Qu, S. Enhanced Compressive Sensing of Dielectric Elastomer Sensor Using a Novel Structure. J. Appl. Mech. 2015, 82, 101004. [Google Scholar] [CrossRef]
- Yoon, J.I.; Choi, K.S.; Chang, S.P. A novel means of fabricating microporous structures for the dielectric layers of capacitive pressure sensor. Microelectron. Eng. 2017, 179, 60–66. [Google Scholar] [CrossRef]
- Peng, S.; Chen, S.; Huang, Y.; Pei, S.; Guo, X. High Sensitivity Capacitive Pressure Sensor with Bi-Layer Porous Structure Elastomeric Dielectric Formed by a Facile Solution Based Process. Sens. Lett. 2019, 3, 2500104. [Google Scholar] [CrossRef]
- Lee, B.-Y.; Kim, J.; Kim, H.; Kim, C.; Lee, S.-D. Low-cost flexible pressure sensor based on dielectric elastomer film with micro-pores. Sens. Actuators A 2016, 240, 103–109. [Google Scholar] [CrossRef]
- Nie, B.; Geng, J.; Yao, T.; Miao, Y.; Zhang, Y.; Chen, X.; Liu, J. Sensing arbitrary contact forces with a flexible porous dielectric elastomer. Mater. Horiz. 2021, 8, 962. [Google Scholar] [CrossRef]
- Kwon, D.; Lee, T.-I.; Kim, M.S.; Kim, S.; Kim, T.-S.; Park, I. Porous dielectric elastomer based ultra-sensitive capacitive pressure sensor and its application to wearable sensing device. In Proceedings of the 2015 Transducers—2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 299–302. [Google Scholar]
- Kwon, D.; Lee, T.-Y.; Shim, J.; Ryu, S.; Kim, M.S.; Kim, S.; Kim, T.-S.; Park, I. Highly Sensitive, Flexible, and Wearable Pressure Sensor Based on a Giant Piezocapacitive Effect of Three-Dimensional Microporous Elastomeric Dielectric Layer. ACS Appl. Mater. Interfaces 2016, 8, 16922–16931. [Google Scholar] [CrossRef]
- Ham, J.; Huh, T.M.; Kim, J.; Kim, J.-O.; Park, S.; Cutkosky, M.R.; Bao, Z. Porous Dielectric Elastomer Based Flexible Multiaxial Tactile Sensor for Dexterous Robotic or Prosthetic Hands. Adv. Mater. Technol. 2022, 8, 2200903. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, M.Y.; Li, J.; Zhu, J. A soft compressive sensor using dielectric elastomers. Smart Mater. Struct. 2016, 25, 035045. [Google Scholar] [CrossRef]
- Hao, W.; Guo, J.; Wang, C.; Wang, S.; Shi, C. A Novel Capacitive-Based Flexible Pressure Sensor Based on Stretchable Composite Electrodes and a Dielectric Elastomer with Microstructures. IEEE Access 2020, 8, 142811. [Google Scholar] [CrossRef]
- Ma, L.; Shuai, X.; Hu, Y.; Liang, X.; Zhu, P.; Sun, R.; Wong, C.-P. A highly sensitive and flexible capacitive pressure sensor based on a micro-arrayed polydimethylsiloxane dielectric layer. J. Mater. Chem. C 2018, 6, 13232. [Google Scholar] [CrossRef]
- Zhu, Y.; Giffney, T.; Aw, K. A Dielectric Elastomer-Based Multimodal Capacitive Sensor. Sensors 2022, 22, 622. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, M.Y. Multi-Axis Soft Sensors Based on Dielectric Elastomer. Soft Robot. 2016, 3, 3–12. [Google Scholar] [CrossRef]
- Böse, H.; Liu, J.; Gerlach, T. Novel dielectric elastomer sensors for the measurement of elevated pressure loads. Proc. SPIE 2021, 11587, 1158708. [Google Scholar]
- Böse, H.; Fuß, E. Novel dielectric elastomer sensors for compression load detection. Proc. SPIE 2014, 9056, 232–244. [Google Scholar]
- Böse, H.; Fuß, E.; Lux, P. Influence of design and material properties on the performance of dielectric elastomer compression sensors. Proc. SPIE 2015, 9430, 522–533. [Google Scholar]
- Böse, H.; Ocak, D.; Ehrlich, J. Applications of pressure-sensitive dielectric elastomer sensors. Proc. SPIE 2016, 9798, 451–463. [Google Scholar]
- Böse, H.; Ehrlich, J.; Gerlach, T.; Shinkar, T.; Uhl, D. Dielectric elastomer strain sensors with enhanced measuring sensitivity. Proc. SPIE 2022, 12042, 181–193. [Google Scholar]
- Böse, H.; Liu, J. Smart elastomer based liquid level sensors with capacitive and resistive measuring principles. Proc. SPIE 2020, 11375, 62–74. [Google Scholar]
- Böse, H.; Müller, D.; Ehrlich, J. Operation tools with dielectric elastomer pressure sensors. Proc. SPIE 2017, 10163, 32–42. [Google Scholar]
- Böse, H.; Ehrlich, J.; Müller, D. Novel Operation Tools with Compression Sensors for Human-Machine Interfaces. In Proceedings of the Sensor 2017, 18th International Conference on Sensors and Measurement Technology, Nuremberg, Germany, 30 May–1 June 2017; pp. 498–503. [Google Scholar]
- Böse, H.; Thuy, M.; Stier, S. Wearable operation device with different types of dielectric elastomer sensors. Proc. SPIE 2018, 10594, 155–166. [Google Scholar]
- Böse, H.; Stier, S.; Muth, S. Glove with versatile operation tools based on dielectric elastomer sensors. Proc. SPIE 2019, 10966, 242–254. [Google Scholar]






























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Böse, H.; Ehrlich, J. Dielectric Elastomer Sensors with Advanced Designs and Their Applications. Actuators 2023, 12, 115. https://doi.org/10.3390/act12030115
Böse H, Ehrlich J. Dielectric Elastomer Sensors with Advanced Designs and Their Applications. Actuators. 2023; 12(3):115. https://doi.org/10.3390/act12030115
Chicago/Turabian StyleBöse, Holger, and Johannes Ehrlich. 2023. "Dielectric Elastomer Sensors with Advanced Designs and Their Applications" Actuators 12, no. 3: 115. https://doi.org/10.3390/act12030115