1. Introduction
Urban green space is an essential component of the human living environment. In recent years, with the updating of urban systems and the construction of the ecological environment, planning the green space system has become extremely complex. Parks are among the most critical resources in the urban green space system, and most of the functional areas that provide services to most urban residents can be found in urban parks. The design mode of parks is also related to City Brand Equity [
1,
2].Therefore, the rational layout of various elements of park design is of great significance in enhancing the comprehensive service function of urban green space and improving people’s health and well-being [
3,
4].
Over the past few decades, despite the rapid development of artificial intelligence in computer science, there has been little exploration of park layout design. The layout design of a park is a unique and critical design task that involves design issues such as the coordination of the positions of elements in the design and the construction of the landscape perception space. The site conditions and design requirements may lead to multiple schemes. Currently, parametric modeling tools such as grasshopper and rhino, which are commonly used by designers, aim to find a unique optimal scheme as the design goal. However, they cannot generate designs independently because they cannot balance the multi-solution nature of park layout design. The Generative Adversarial Network (GAN) technology proposed by Goodfellow [
5] in 2014 represented a turning point in integrating artificial intelligence and planning and design due to its excellent image generation ability. Initially applied to indoor design in architecture, it has gradually established a basic research paradigm and has subsequently developed rapidly in outdoor space planning and design in recent years. Previous research has shown that GANs have unique generative design capabilities, with the potential to achieve an automatic park layout design.
However, currently there is a lack of research on parks in the field of automatic design. Most of them use small sample data and lack discussion on human–machine collaborative design mode. The research questions are as followed: (1) How to construct generative models for complex objects; (2) How to enhance small-sample data by effective methods; (3) How to design experiments to discuss the differences between full algorithms and human–machine collaboration. Therefore, our research focuses on how to build a full-process automatic generation system for green spaces based on GAN. Our research goals are as follows: (1) To construct a complete process for automatic generation of park green spaces; (2) To construct a data augmentation scheme; (3) To compare and analyze the research results and discuss the similarities and differences between human and algorithm-generated outcomes.
We realized our research goal according to the following three steps: first, a small and medium-scale park green space was selected as the research object, and a full-process automatic design system for small and medium-scale park green spaces was constructed based on pix2pix and CycleGAN; second, we constructed a data augmentation module, and the training was further optimized to solve the data bottleneck problem; finally, the generation results of the human design were compared to discuss the differences between algorithm-driven generation design and the work of a human designer. This paper discusses the advantages and limitations of new design methods that involve human–machine coordination under the background of new technology. It also proposes a universal method for data augmentation that can be applied to fields such as architecture and interior design. This method can promote the intellectual development of urban green space planning systems.
2. Related work
This section reviews the relevant literature on the application of GANs in planning and design published after Goodfellow’s [
5] proposal in 2014. It divides the previous work into two categories: small-scale indoor space design generation and outdoor space design generation, according to the timeline and specific areas, and clarifies the direction of this research. These two categories will be presented in this section.
Generative Adversarial Network (GAN) is a machine learning algorithm that trains two neural networks to compete in a zero-sum game. GANs have significantly superior image generation capabilities compared to previous deep learning models, and are thus experiencing increased application in the generation of design schemes for human settlement environments [
6]. Research on GAN-based generative design was initially applied to indoor architecture design. It gradually established a basic research paradigm, which has developed rapidly in outdoor space planning and design in recent years.
Early research mainly focused on indoor design in architecture. Huang [
7] and Zheng [
8] explored the layout of single-story indoor space floor plans by generating design plan from design layout (colour block diagrams) using pix2pix, establishing the primary research paradigm in this field and laying the foundation for subsequent research. Subsequently, Yang [
9] and others initially expanded upon this research paradigm by dividing the generation process into two steps: ‘site conditions–functional zones-design schemes’, to construct a framework for the automatic generation of design schemes for youth apartments. Chaillou [
10] and others approached the design process by breaking it down into multiple steps and defining constraints step by step, designing a full-process automatic generation framework for architectural design schemes called Archi-GAN. This essentially completed the research paradigm of multi-step segmented generation. Subsequent research primarily focused on the controllability of the generation framework, gradually introducing scientific indicators such as the pedestrian flow index. For example, Wang [
11], who introduced pedestrian flow indicators into the design process from contour to layout, designed an indoor layout generation model called ActFloor-GAN that conforms to the pedestrian flow direction. Nelson [
12,
13] introduced knowledge graphs into indoor layout generation, implemented designs that conform to functional flow lines in House-GAN, and further achieved detailed control over the opening of doors in the development of House-GAN++. Huang et al. introduced the attention mechanism in layout design, achieving innovation in the automatic design at the algorithm level. The regularity and clear functional division of small-scale indoor spaces align more closely with the generation logic of algorithms. In the past five years, the development has been rapid, forming a basic research paradigm of ‘site-layout-plan’ and gradually improving the scientific nature of GAN applications in space layout generation design through the introduction of scientific indices and algorithm improvements, approaching actual engineering application requirements.
This research paradigm has gradually expanded to outdoor space design in addition to small-scale indoor space design. Compared to small-scale indoor design, medium-scale outdoor space is more complex in terms of spatial type, layout content, and design rules. Previous research found that related studies typically choose research objects with strong functionality and regularity in outdoor space design, such as residential areas and schools. For example, Cong [
14], Lin [
15], Zhang [
16], Liu [
17], and Pan [
18] simplified the design process to the ‘site-layout-plan’ paradigm and made preliminary explorations into outdoor space design without affecting the design outcome. In outdoor space design, green lands in parks are more complex, so there is less related research. This is because landscape design involves transforming existing sites, rather than re-creating space functions and forms within the boundaries of building red lines. The spatial boundaries of landscape design are more ambiguous, the layout content is more diverse, and the design rules are more flexible. But in existing research, the general research paradigm is also ‘site-layout-plan.’ For example, Liu [
19] and others chose the well-organized and spatially enclosed private gardens in the Jiangnan region as research objects and explored the ‘site-layout’ design process, proving its feasibility; Zhou [
20] and others realized the ‘layout-plan’ design process.
Current research in this field has expanded from indoor space design to outdoor space planning. Methods have primarily focused on training and generating small samples, often simplifying the complex design process to a ‘site-layout-plan’ generation process. The bottlenecks in this field of research are as follows: (1) a focus on clear, regular indoor space design, with less discussion of complex layout generation problems such as park green spaces; (2) a lack of sufficient open source data, which limits the effectiveness of the generated results; and (3) a focus on technical details, with less research comparing different algorithms and the differences between human designer and algorithm-driven generated design results.
In summary, there is little research on whether neural networks can learn the design rules of outdoor green spaces, including their layout and plan. As a result, our research explores the design of complex outdoor space generation achieved using a GANs algorithm based on existing research results. A data enhancement module is also constructed and further optimized for training to solve the data bottleneck problem. Finally, human design generation results are compared to explore the differences between algorithm-driven generative designs and human design results.
3. Methodology
3.1. Analytical Framework
This study aims to propose a new automated park layout design system (
Figure 1); the overall experimental framework is shown in
Figure 2. The dataset is one of the important influencing factors guiding the process to obtain the desired results, as each sample contains basic information regarding the park layout within it. At this stage, the amount of publicly available data for green space design schemes is relatively small compared to architectural design schemes, so we adopt multiple sources for data collection. The following labeling process extracts the layout elements in the park plan, with different labels for each category. All images are then processed to meet the requirements of the selected neural network. After that, a data augmentation system is trained based on the neural network, enabling the original 194 datasets to be automatically augmented to 4047 datasets, constructing a more robust dataset to explore the relationship between algorithm design and human design. We have introduced pix2pix [
21] and CycleGAN [
22], two neural networks used for image generation. The two datasets are fed into the neural network, and the algorithm outputs the corresponding arithmetic results. In the evaluation phase, the two algorithm generation capabilities are evaluated, followed by a comparative analysis of human and algorithmic designs based on the optimized full-flow automated generation system to examine the potential of the system for application in human–machine co-design relationships. More details on each step are developed in the following sections.
3.2. Data Collection and Preparation
Small to medium-scale parkland was chosen as the target green space for this study. Community parks (1–10 hectares) are the most prevalent; this includes a small number of small-scale comprehensive parks (over 10 hectares) and a small number of other green space types that meet the requirements. Considering that outdoor space types are diverse and conditions are complex, and that deep learning is a statistical-based probabilistic model, overly complex and diverse unordered data samples will lead to algorithm training failure. Therefore, both the suitability of the algorithm features and the study object features were considered in selecting the study object. We selected the samples based on the following quadratic aspects: (a) strong regularity, (b) fewer special design conditions, (c) clearer functional areas, (d) smaller site height differences. In the end, we selected 194 small and medium-scale parks as training samples in the original dataset and 6 cases as test samples. The test cases cover as many functions as possible and cover a variety of park layout organization patterns, such as central, multi-group, and axial, providing a reference for exploring the generation of complex spatial types for research. Next, as the pix2pix algorithm requires a one-to-one corresponding annotated dataset for supervised learning, which, in CycleGAN, needs to become unsupervised learning of images, this paper unifies the resolution of each sample to 256 × 256 pixels.
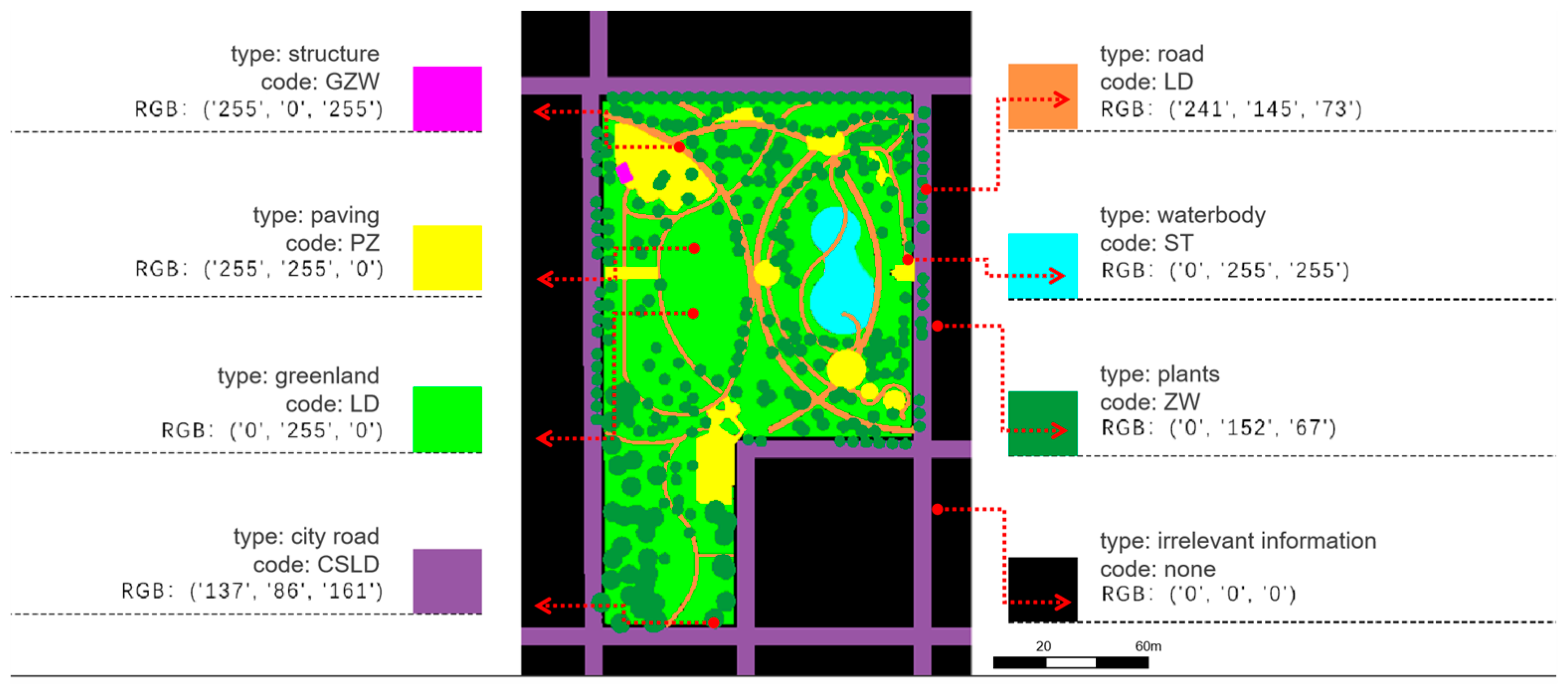
After collecting the small and medium-scale park plan dataset, we used different colors to label the park layout elements, as shown in
Figure 3. The selection and classification of labeled elements depended on the experiment’s objectives and the objects’ characteristics. We finally identified eight categories of elements through semantic segmentation and comparison of different styles of park plans, to represent the key elements of the park layout. Each plan was segmented into eight categories: green spaces, water bodies, roads, paved squares, structures, red lines, urban roads, and plants.
3.3. LandscapeGAN Model
The study relied heavily on pix2pix and CycleGAN to build an automated design layout generation system.
3.3.1. Working Principles and Implementation of pix2pix
pix2pix is a conditional generative adversarial network (cGAN) that learns mapping from input images to output images. It was introduced in a 2017 paper by Isola et al. [
21], titled ‘Image-to-image translation with conditional adversarial networks’.
The basic structure of the pix2pix algorithm is shown in
Figure 4. The pix2pix model includes a generator and a discriminator, the former being G and the latter being D.
First, in the input layer, the two are input to the generator D of the pix2pix model as paired images (x, y); subsequently, generator G generates a fake park plan G(x) and merges the fake park plan (G(x)) and the actual park layout (x) into the discriminator (D). The discriminator (D) outputs a probability value with a threshold of [0, 1], which indicates whether the input is true (i.e., whether it is true or not), and they are both input into the discriminator (D). Finally, the discriminator (D) outputs a probability value with a threshold of [0, 1], which indicates whether the input is true (i.e., whether it is a real “layout plan” data pair). A probability value close to 1 means that the data are close to the real ‘layout-plan.’ or ‘layout-floor plan,’ and, conversely, a probability value close to 0 means that the model considers them false data generated by the generator. While the above three steps are performed, the model is trained in another way: first, the two are entered as pairs of images (x, y) into the discriminator (D) of the pix2pix model; subsequently, the discriminator follows a similar process as described above, predicting whether the input image is true or not, based on the probability values.
In summary, after two rounds of adversarial generation training, the generator and the discriminator improve their generative and discriminatory capabilities, respectively. When the capabilities of the generator and the discriminator are balanced (i.e., the Nash equilibrium point), the generated results can deceive the discriminator and generate ‘false’ data.
3.3.2. Working Principles and Implementation of CycleGAN
CycleGAN is a type of generative adversarial network (GAN) that enables image-to-image translation using unpaired training data. It was introduced in a 2017 paper by Zhu et al. [
22], titled ‘Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks.’ It is a conditional GAN framework that learns multi-model mapping from two image domains to another image domain by labeling multiple pieces of semantic information. The CycleGAN model is used several times in the automatic generation system designed in this paper. Taking the design plan generation system as an example, we find that the two image domains refer to the real park design scheme, image domain X, and the real park layout scheme, image domain Y, while the semantic information is the layout elements represented in different colors from the labeled images. The detailed architecture of CycleGAN is shown in
Figure 5.
The generation process consists of two parts: (1) the generation process from the park design solution X to park layout solution Y and (2) the generation process from the park design solution Y to park layout solution X. The model includes 2 generators, assumed to be Generator (X to Y) and Generator (Y to X). As shown in the bottom left of
Figure 5, in the generation process of (X to Y), Generator (X to Y) generates Park Layout Scheme Y (True Layout → False Layout) based on Park Design Scheme X, and then Generator (Y to X) generates Park Design Scheme X (False Layout → False Layout) based on Park Layout Scheme Y in reverse. Similarly, as shown in the bottom right of the figure, in the generation process of (Y to X), Generator (Y to B) generates Park Design Scheme X (True Layout → False Layout) based on Park Layout Scheme Y, and then Generator (X to Y) generates Park Layout Scheme Y (False Layout → False Layout) based on Park Design Scheme X in the reverse of this process, Generator (X to Y) and Generator (Y to X) are opposite generation processes, bound by their respective cycle-consistency loss. The model also includes 2 discriminators, assumed to be Discriminator (X) and Discriminator (Y), which are used to determine whether the input park design scheme X and park layout scheme Y are “true” or “false”, respectively.
3.4. Training and Testing
3.4.1. Training
This study includes four stages: pre-training, data augmentation, optimization training, and testing.
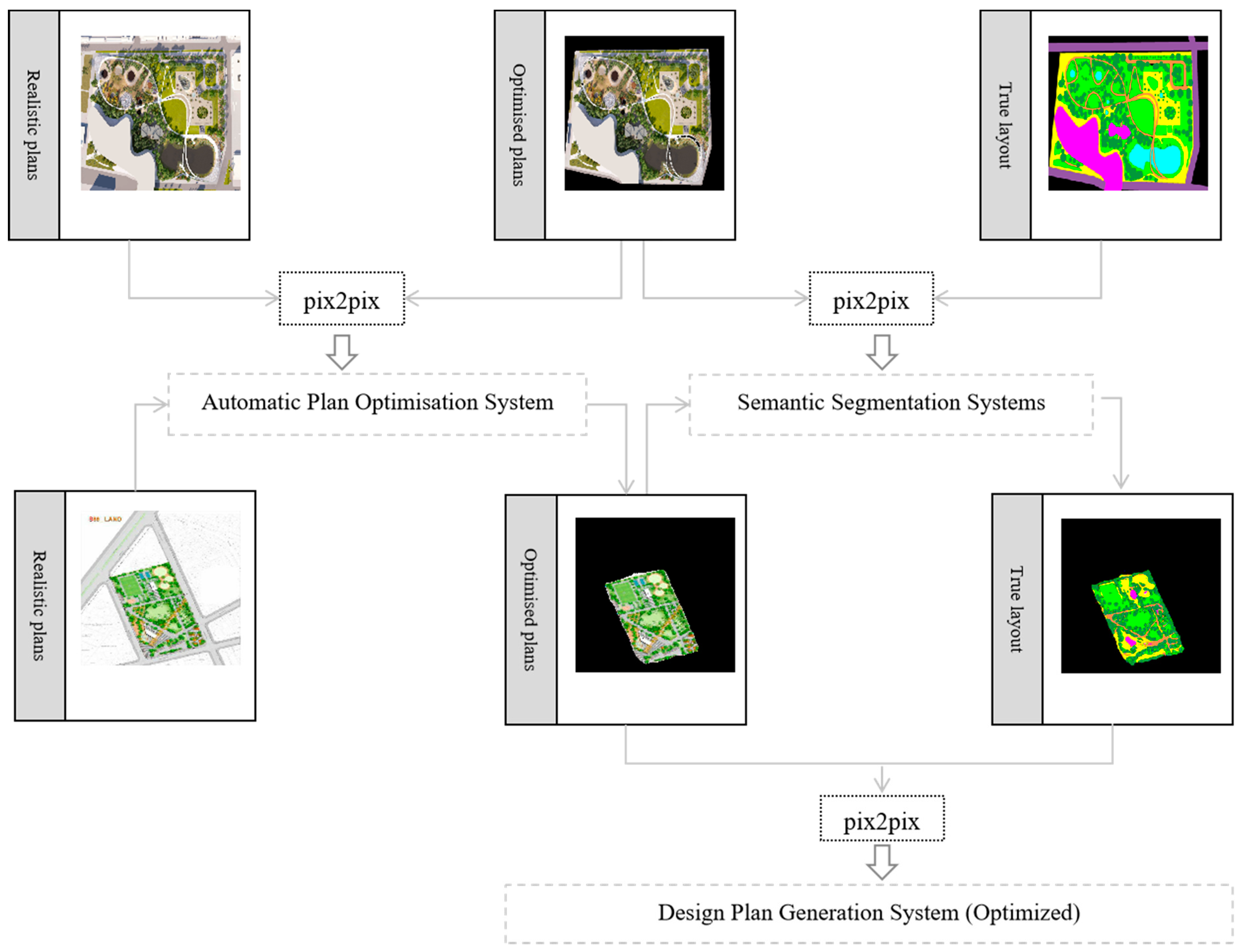
Firstly, a pre-experiment (
Figure 6) was conducted. Through two neural network trainings, the design layout generation system and the design plan generation system were constructed.
In the next term, the automatic plan optimization system and the semantic segmentation system were trained to realize data augmentation. This workflow is based on the pix2pix model [
21], ROI technique, and 194 original datasets, as shown in
Figure 7. The final enhanced dataset had 4047 images.
We repeated the experimental process (
Figure 8) from the pre-experiment using the data-augmented dataset. Finally, we obtained an optimized design plan generation system.
3.4.2. Testing
In the testing section, we conducted two comparative experiments, as shown in
Figure 9. First, we used CycleGAN and pix2pix to establish the design plan generation system and performed algorithm evaluation during this process.
Second, we used both designer hand-drawn layouts and algorithm-generated layout images as inputs for design mode evaluation, as shown in
Figure 10.
In order to ensure that all experiments are conducted on the same basis, this paper selects six cases with distinctive features in the park layout as test samples to observe the applicability and accuracy of the trained neural network in different scenarios.
Figure 11 shows the six test samples. They exhibit various layout characteristics: Sample 1 and 2 are more general, featuring regular land contours and relatively straightforward building and water features. Samples 3, 4, 5, and 6 are more specific and unique in their layout. Cases 3, 4, and 5 have irregular site contours and complex building and water conditions. Case 6 has a central axis arrangement of the original building conditions.
4. Results and Analysis
4.1. Data Augmentation Result
We tested the design plan generation system before and after optimization using the six test samples shown in
Figure 12 as objects. The algorithm could generate results similar to the actual design plans and handle the connection between different land types well. The algorithm generated results that were more unified and stable in style.
In our qualitative evaluation of the expression of standards, we found that the results generated after data augmentation improved significantly in the following two aspects: (1) The algorithm yielded sharper tree shapes, and the differentiation between trees and grass was more discernible. (2) The algorithm was closer to the actual results regarding the color of buildings, paving, and water bodies.
The data enhancement system designed in this paper quickly and efficiently expanded the data volume, effectively improving the training quality and generating the plan diagram of the functional system for small- and medium-scale community parks. The results have high authenticity and rationality.
4.2. Evaluation
4.2.1. Algorithm Evaluation
Based on the original dataset, we trained a design layout generation system and a design plan generation system in sequence. We used pix2pix and CycleGAN algorithms as models during the training. Afterward, the six test samples were input into the two generation systems, one after the other, to compare and analyze the scenarios suitable for each algorithm. In testing the design plan generation system, we selected the layout program generated by CycleGAN as the test sample. We present the results in
Figure 13. Next, we will conduct a detailed analysis of the test results.
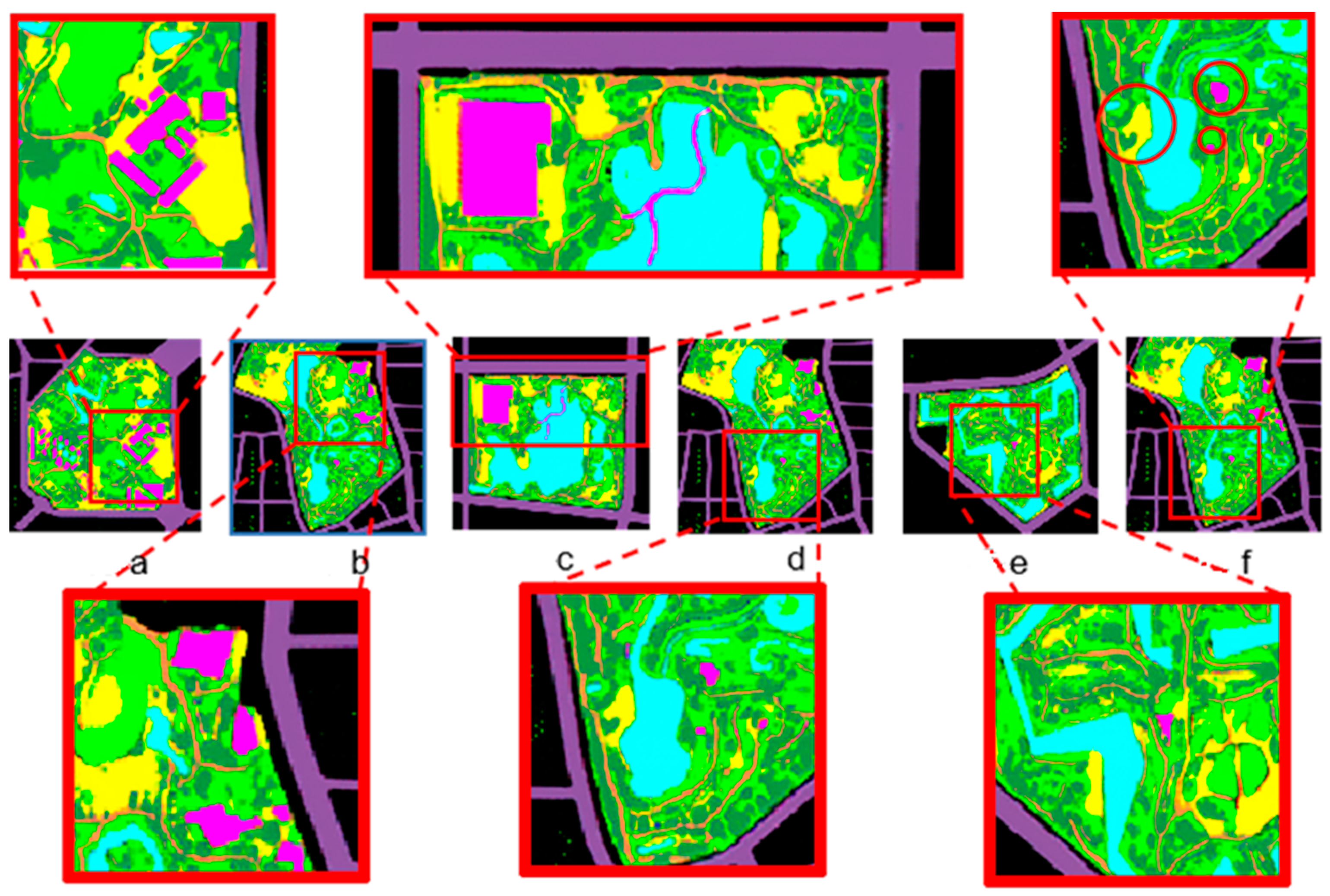
In the layout generation experiment results (
Figure 13), the machine learning results differ from the actual situation. The pix2pix and CycleGAN algorithms showed logical coherence in terms of the performance of the path, space, planting, waterfront design, and element associations. Thus, we gained a clearer understanding of the design patterns by using both pix2pix and CycleGAN algorithms to generate park layout designs.
(a) The area occupied by each element is reasonable. The road system runs through the entire park (
Figure 14a), forming a more fluid and reasonable park road flow. The distribution of the plants shows natural (
Figure 14b) and regular (
Figure 14c) planting, which can be adapted to different areas of plant elements according to the surrounding environment (
Figure 14d). The paving area presents adaptability with the surrounding environment (retained buildings, retained water bodies, urban roads, and design scope), which can be designed with different areas such as banded and dot-shaped paving according to the waterfront environment and building area. As depicted in
Figure 14e, the algorithm designed a large amount of pavement around the building, with a minimal amount around the lawn.
(b) The position relationship between the various elements is reasonable (
Figure 15). The design reflects the relationship between the building, road, and paving: the pavement connects to the building (
Figure 15a,b) and the road system connects the building and the paving to form a landscape node (
Figure 15c). At the same time, in the waterfront area, the pavement, vegetation, and water body present a harmonious and coherent spatial layout, forming a rich waterfront space The unique point is that, in
Figure 15e,f, the algorithm creates a water-separated correspondence between the landscape node and the building along the long axis of the water surface, reflecting the waterfront design’s approach of using the view.
In the test results of the plan generation experiment, the results of the pix2pix and CycleGAN algorithms present differentiated styles, as shown in
Figure 16.
In the test results of pix2pix, the algorithm can differentiate between different colors of water bodies, vegetation, and paving. However, it also shows certain deficiencies: (1) A more pronounced red striped texture appears in the rendering of roads. (2) Some areas showing mode collapse for highly similar samples were generated, as shown in
Figure 17. Mode collapse is a problem in generative adversarial networks, which means the generator can only produce a few or one mode of data, instead of reflecting the true diversity of data. This leads to unrealistic and repetitive results. For example, when generating designs, the algorithm may create similar image patterns in the complex areas of the image.
The test results of CycleGAN can reflect the site type more accurately and show a specific rendering style: (1) lavender is selected for the representation of structures, (2) yellow is dominant in the representation of plazas and paving, (3) the grass and trees can be distinguished more clearly with different depths of green, and (4) the water surface can be accurately represented in blue. The main defects of the model plan are as follows: (1) the clarity of the trees could be better; (2) the colors of the structures, paving, and water bodies are still very different from the actual results.
Currently, pix2pix (pix2pixHD) or CycleGAN is mainly used as the training algorithm in automatic generation research in the field of planning and design; it has been used by Liu [
19], Zhou [
20], andYe [
23], among others. However, fewer studies have conducted a comparative analysis of the application scenarios of the two algorithms. Based on the experimental analysis in this section, CycleGAN outperforms pix2pix in terms of both stability and accuracy in target generation and has more potential for generative design.
4.2.2. Design Mode Evaluation
Generative design methods based on deep learning are emerging, with specific differences from traditional design. The system’s efficiency has been dramatically improved, reducing the time needed to complete the task. However, this improvement in efficiency comes with a trade-off: the designer’s role needs to be more prominent, and the algorithm can be difficult to control. Therefore, in this subsection of the evaluation, we compare and analyze the similarities and differences between the results generated by AI-assisted design and AI full-flow automatic design (shown as
Figure 18) and explore the human–computer interaction working mode under the full-flow automatic design generation system.
When analyzing the homogeneity and differences between the two model classes, Sample 5 (shown as
Figure 19) and Sample 6 (shown as
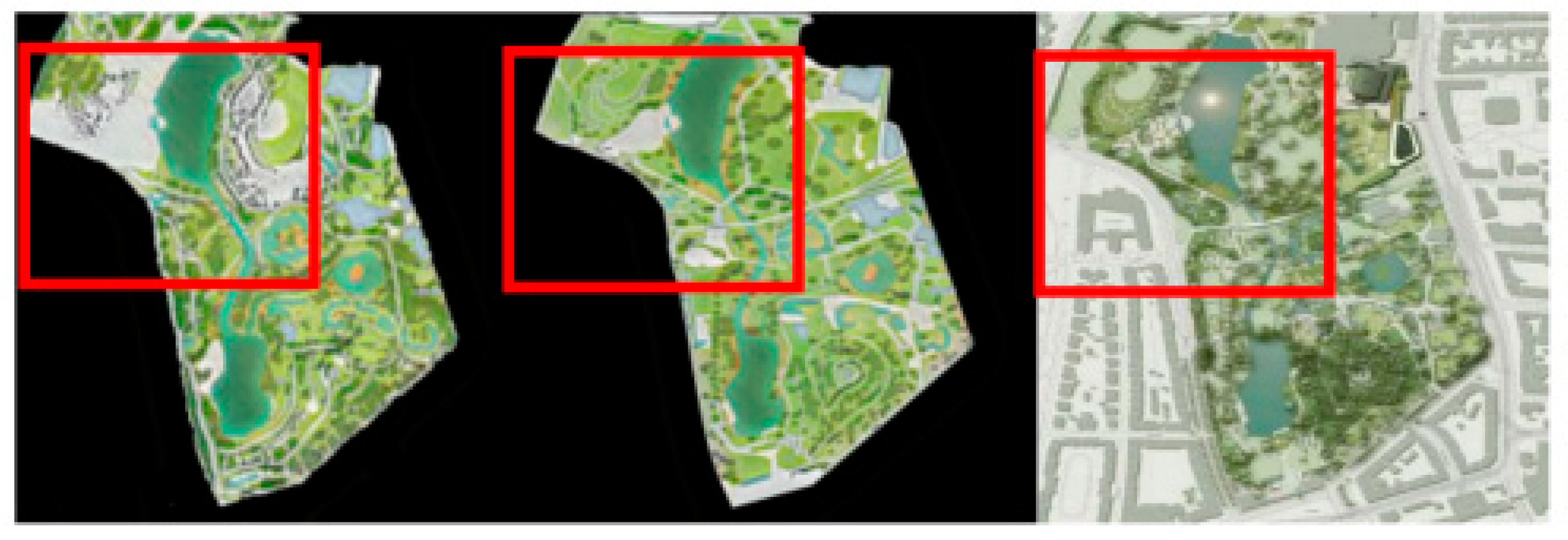
Figure 20) are used as examples. As shown in the red boxes of
Figure 19, Sample 5’s upper waterfront area design utilizes the waterfront walkway and central lawn as its foundation. Both the algorithm and the designer have participated in this design. Despite the variations in the way of space enclosure, the algorithm opts for a combination of paving and lawn to shape an open space. The human designer, On the other hand, has adopted a semi-open space with a grouping of plants and a scattered arrangement. The perception of space differs between the two design approaches, but both comply with the basic design principles and are logically self-consistent. In designing sample 6, shown as the red boxes of
Figure 20, symmetrically distributing the landscaping following the buildings’ axial distribution was adopted by the designer. The results generated by the algorithm show a certain degree of symmetry in the design of the green space paving, but not yet to the high degree of symmetry presented in the designer’s design.
In summary, GAN demonstrates a unique ability to generate designs. The similarity between the results generated by GAN and the designs created by the designer indicates that GAN also has the ability to mine implicit patterns in design. In conclusion, an automatic design system based on GAN has the potential to be integrated with human–machine collaborative design process.
5. Discussion
With the optimization of algorithms and the improvement of computational capabilities and data resources, deep learning technology is expected to achieve a closer combination with automatic planning and design. This paper, based on the unique characteristics of the outdoor medium and small-scale green spaces, explores the advantages and limitations of new human–computer collaborative design methods through interdisciplinary research in the context of new technologies.
This paper proposes a novel intelligent generation system for park layout based on GANs algorithms. The system realizes the ‘construction, optimization, and validation’ of complex outdoor space generation design. It is constructed based on pix2pix and CycleGAN and includes a data augmentation module to solve the data bottleneck problem. The generation results of human design are compared to discuss the differences between algorithm-driven generation.
In recent years, GANs have been widely used in image recognition and generation, and a research paradigm has gradually been established in architecture, extending from indoor space to outdoor space. However, no comprehensive research paradigm exists for complex spaces such as parks and green spaces from site to design.
Early research focused on interior design [
7,
8,
9,
10,
11], and in recent years there has been a gradual emergence of automatic generation design for outdoor spaces, but mainly focuses on functional areas with regular layout, such as residential areas [
14]. To be more specific, Liu et al. [
17] studied generative design, focusing on the selection of research objects with strong regularity and enclosed space in Jiangnan private gardens. Zhou et al. [
20] et al. focused on the rendering of line drawings in the generation design of outdoor spaces. Ye et al.’s [
23] research focused on the urban scale. Therefore, our research chose parks, which are currently less studied but have important significance for outdoor green space, as the research object. At the same time, a full-process system for generation and rendering was constructed.
Based on the pix2pix and CycleGAN approach, this paper improves the model’s conversion efficiency. It enhances the complexity and accuracy of the output design, forming a complete design mode for green park spaces and generating a complete, readable, and fundamentally reasonable medium and small-scale park design plan.
Understanding design patterns and the creativity of the generated results is integral to the entire experimental process. In the layout generation phase, CycleGAN and pix2pix understand the design patterns of functional zoning and landscape elements in terms of form, position, and relationship by reading and learning the RGB values carried by each sample in medium–small-scale park design. In the plan rendering phase, CycleGAN understands the correspondence between actual colors and RGB values in layout diagrams by learning from each sample and renders the plans flexibly. At the same time, the data augmentation method driven by the algorithm designed in this experiment also has general applicability to related fields such as architecture and interior design.
The GAN-based generative design model deviates from the conventional design approach of “analyzing site problems and finding solutions” and instead emphasizes obtaining design experience from numerous plans and rapidly generating plans according to input parameters, making the design process less transparent and manageable. This method is highly efficient and achieves the expected human–computer interaction, but it also challenges traditional planning and design concepts.
The above conclusions demonstrate the vast potential of GAN in the field of green space system planning. However, the study still has certain limitations: the results of data augmentation still have some irrationality and lack of control over details. Compared with the current development of indoor and outdoor architectural design, there are still significant limitations in terms of the scientific introduction of constraints and the completeness of the generative process in current green space automatic design. As such, further research in this field should include comprehensive external and three-dimensional spatial constraints by enhancing the dataset, conducting targeted design experiments, and refining the algorithms. It should also involve connecting the front-end and back-end with three-dimensional analysis and site model construction, working towards generating more functional outcomes for mechanical design.
6. Conclusions
This research constructed a novel intelligent generation system for park layout based on GANs algorithms, achieving full-process automation of design generation for complex outdoor spaces. We also studied the adaptability of pix2pix and CycleGAN algorithms in generating designs and promoted further integration of artificial intelligence and planning and design fields. In the meantime, this paper discussed the co-design models for humans and GANs.
Data insufficiency and poor quality are the most important factors limiting this field’s development. The data enhancement module proposed in this research provides a general solution to break through this bottleneck.
With the continuous update of related technologies such as GANs, we expect this research to stimulate the development of human–computer collaborative design methods, introducing systematic and scientific thinking into traditional planning and design fields. In our future research, we will pay more attention to the relationships between design elements, rather than merely the image layout, at the design logic level. We are trying to constrain the algorithm’s generation results with more site information conditions, such as introducing external environmental information or more scientific indicators for the park. At the technical method level, we are updating our existing techniques and attempting to apply novel deep learning techniques such as Stable Diffusion, VQGAN (Vector-Quantized Generative Adversarial Network), and so on, to pursue better generation effects. In the meantime, this research incorporates urban green space planning from a macro perspective. For designers, obtaining a scheme generated from a design layout in seconds is more intuitive and efficient. For managers, the human–machine collaborative design mode involves the reform of the design work business flow, which will provide a new workflow. This will have profound impacts on the production mode, personnel structure, and enterprise management framework. In the meantime, city green space information can be collected to achieve city-scale applications by using large-scale urban data. There are still many factors to be investigated, tested, and experienced in the future.
Author Contributions
Conceptualization, R.C., X.Y. and B.B.; Methodology, R.C., X.Y. and B.B.; Software, R.C. and X.Y.; Validation, R.C.; Formal analysis, R.C., X.Y. and B.B.; Investigation, R.C.; Resources, J.Z.; Data curation, R.C., X.Y., S.J. and B.B.; Writing—original draft, R.C. and X.Y.; Writing—review & editing, X.Y., S.J., Y.H., X.L., S.X. and C.W.; Visualization, R.C. and X.Y.; Supervision, R.C.; Project administration, X.Y.; Funding acquisition, J.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the National Natural Science Foundation of China under Grant 52208041, the Key Laboratory of Ecology and Energy-saving Study of Dense Habitat (Tongji University), Ministry of Education under Grant 20220110 and the Beijing High-Precision Discipline Project, Discipline of Ecological Environment of Urban and Rural Human Settlements.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon request.
Acknowledgments
The authors are grateful to the editor and reviewers for their valuable comments and suggestions.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Dospinescu, N. The Public Relations Events in Promoting Brand Identity of the City. Econ. Appl. Inform. 2014, 1, 39–46. [Google Scholar]
- Górska-Warsewicz, H. Factors Determining City Brand Equity—A systematic Literature Review. Sustainability 2020, 12, 7858. [Google Scholar] [CrossRef]
- Semeraro, T.; Scarano, A.; Buccolieri, R.; Santino, A.; Aarrevaara, E. Planning of Urban Green Spaces: An Ecological Perspective on Human Benefits. Land 2021, 10, 105. [Google Scholar] [CrossRef]
- Nguyen, P.-Y.; Astell-Burt, T.; Rahimi-Ardabili, H.; Feng, X. Green Space Quality and Health: A systematic Review. Int. J. Environ. Res. Public Health 2021, 1I8, 11028. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Networks. arXiv 2014, arXiv:1406.2661. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, R.; Bao, B. Research Progress and Future Prospects of Generative Adversarial Networks in the Design of Small-Scale Spatial Layout Generation. Zhuangshi 2022, 3, 80–85. [Google Scholar]
- Huang, W.; Hao, Z. Architectural Drawings Recognition and Generation through Machine Learning. In Proceedings of the 38th Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA), Mexico City, Mexico, 18–20 October 2018. [Google Scholar]
- Hao, Z. Drawing with Bots: Human–computer Collaborative Drawing Experiments. Learning, Prototyping and Adapting, Short Paper. In Proceedings of the 23rd International Conference on Computer-Aided Architectural Design Research in Asia (CAADRIA), Singapore, 15–18 May 2018. [Google Scholar]
- Yang, L. Research on Automatic Generation of House Types for Youth Flats Based on Deep Learning. Master’s Thesis, South China University of Technology, Guangzhou, China, 2019; p. 130. [Google Scholar]
- Chaillou, S. ArchiGAN: Artificial Intelligence x Architecture. In Architectural Intelligence: Selected Papers from the 1st International Conference on Computational Design and Robotic Fabrication (CDRF 2019); Singapore: Berlin/Heidelberg, Germany, 2020; pp. 117–127. [Google Scholar]
- Wang, S.; Zeng, W.; Chen, X.; Ye, Y.; Qiao, Y.; Fu, C.W. Actfloor-Gan: Activity-Guided Adversarial Networks for Human-Centric Floorplan Design. IEEE Trans. Vis. Comput. Graph. 2021, 29, 1610–1624. [Google Scholar] [CrossRef] [PubMed]
- Nauata, N.; Chang, K.H.; Cheng, C.Y.; Mori, G.; Furukawa, Y. House-Gan: Relational Generative Adversarial Networks for Graph-Constrained House Layout Generation. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020. [Google Scholar]
- Nauata, N.; Hosseini, S.; Chang, K.H.; Chu, H.; Cheng, C.Y.; Furukawa, Y. House-Gan++: Generative Adversarial Layout Refinement Networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition 2021, Nashville, TN, USA, 19–25 June 2021. [Google Scholar]
- Sun, C.; Cong, X.Y.; Han, Y.S. Cgan-Based Design Method for the Generation of Forced Drainage Schemes in Residential Areas. J. Harbin Inst. Technol. 2021, 53, 111–121. [Google Scholar]
- Lin, W.Q. Research on Automatic Generation of Primary School Campus Design Layouts Based on Deep Learning. Master’s Thesis, South China University of Technology, Guangzhou, China, 2020; p. 148. [Google Scholar]
- Zhang, T. Experiment on Generating Residential Group Layouts Using Deep Learning. Master’s Thesis, Nanjing University, Nanjing, China, 2020; p. 156. [Google Scholar]
- Liu, Y.; Luo, Y.; Deng, Q.; Zhou, X. Exploration of Campus Layout Based on Generative Adversarial Network. In Proceedings of the International Conference on Computational Design and Robotic Fabrication, Shanghai, China, 3–4 July 2021. [Google Scholar]
- Pan, Y.; Qian, J.; Hu, Y. A Preliminary Study on the Formation of the General Layouts on the Northern Neighborhood Community Based on GauGAN Diversity Output Generator. In Proceedings of the International Conference on Computational Design and Robotic Fabrication, Freiburg, Germany, 28–30 July 2020. [Google Scholar]
- Liu, Y.; Fang, C.; Yang, Z.; Wang, X.; Zhou, Z.; Deng, Q.; Liang, L. Exploration on Machine Learning Layout Generation of Chinese Private Garden in Southern Yangtze. In Proceedings of the International Conference on Computational Design and Robotic Fabrication, Shanghai, China, 3–4 July 2021. [Google Scholar]
- Zhou, H.Y.; Liu, M.L. Artificial Intelligence-Assisted Design: Landscape Garden Plan Recognition and Rendering Based on Deep Learning. Chin. Landsc. Archit. 2021, 37, 56–61. [Google Scholar]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; IEEE Computer Society: Washington, DC, USA, 2017; pp. 1125–1134. [Google Scholar]
- Zhu, J.-Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired image-to-image translation using cycle-consistent adversarial networks. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2242–2251. [Google Scholar]
- Ye, X.; Du, J.; Ye, Y. MasterplanGAN: Facilitating the smart rendering of urban master plans via generative adversarial networks. Environ. Plan. B Urban Anal. City Sci. 2022, 49, 794–814. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















