
The Use of Unmanned Aerial Vehicles for Dynamic Site Layout Planning in Large-Scale Construction Projects




Abstract
:1. Introduction
2. Literature Review
2.1. UAV Applications in Construction Planning and Monitoring
2.2. GIS (Geographic Information System) and BIM for Site Layout Planning
3. Materials and Methods
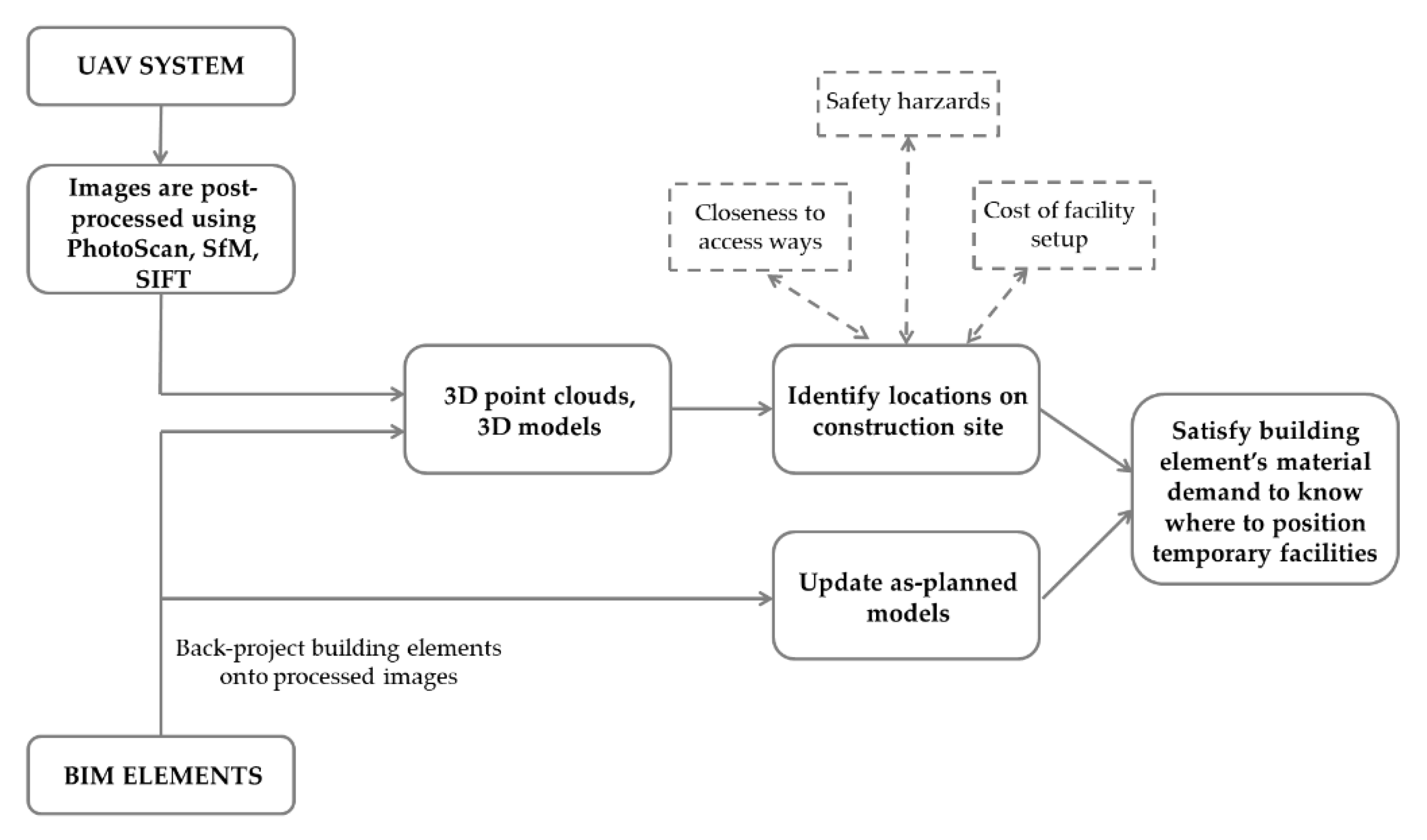
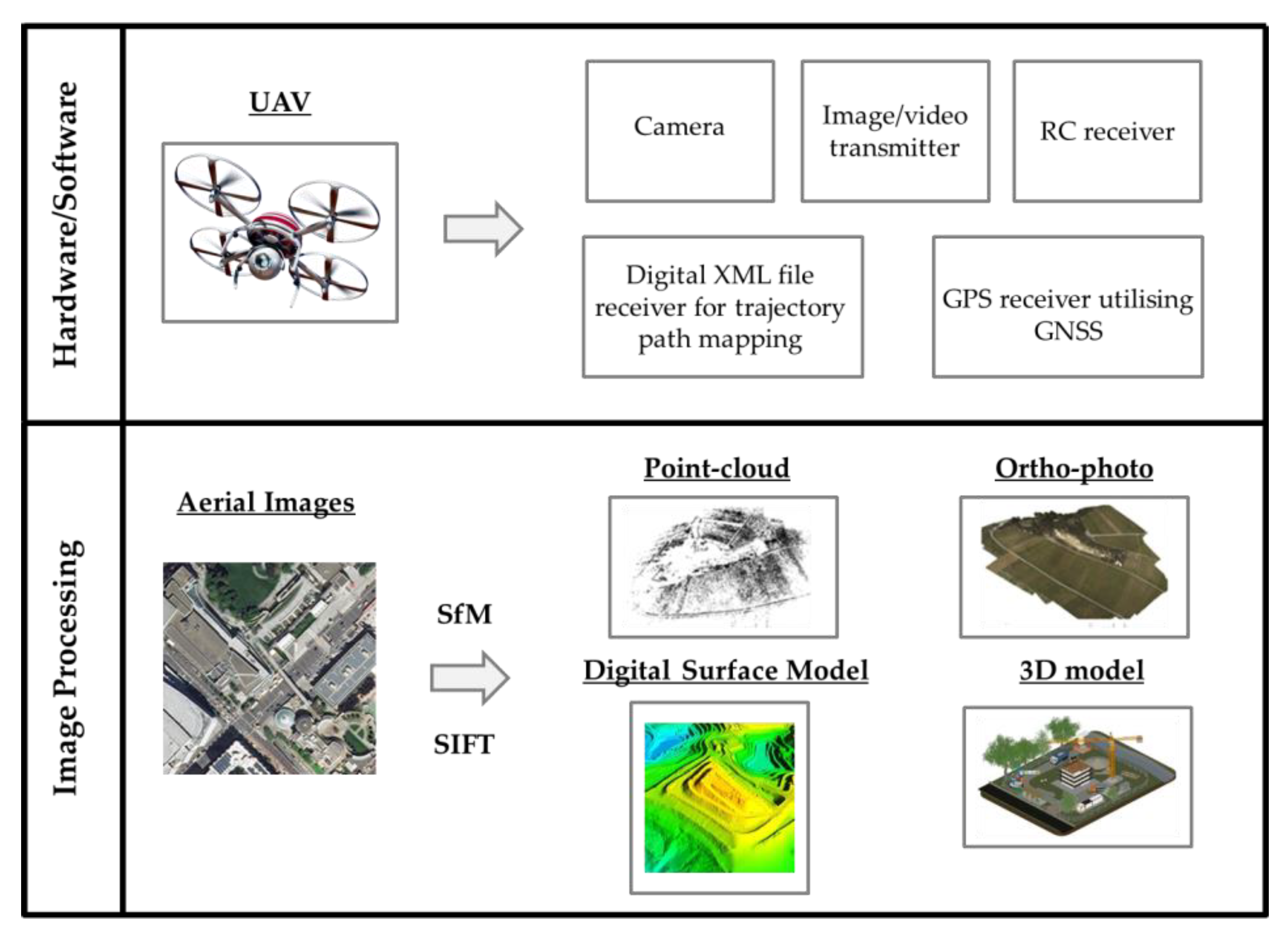
3.1. The Use of UAVs in Site Layout Planning
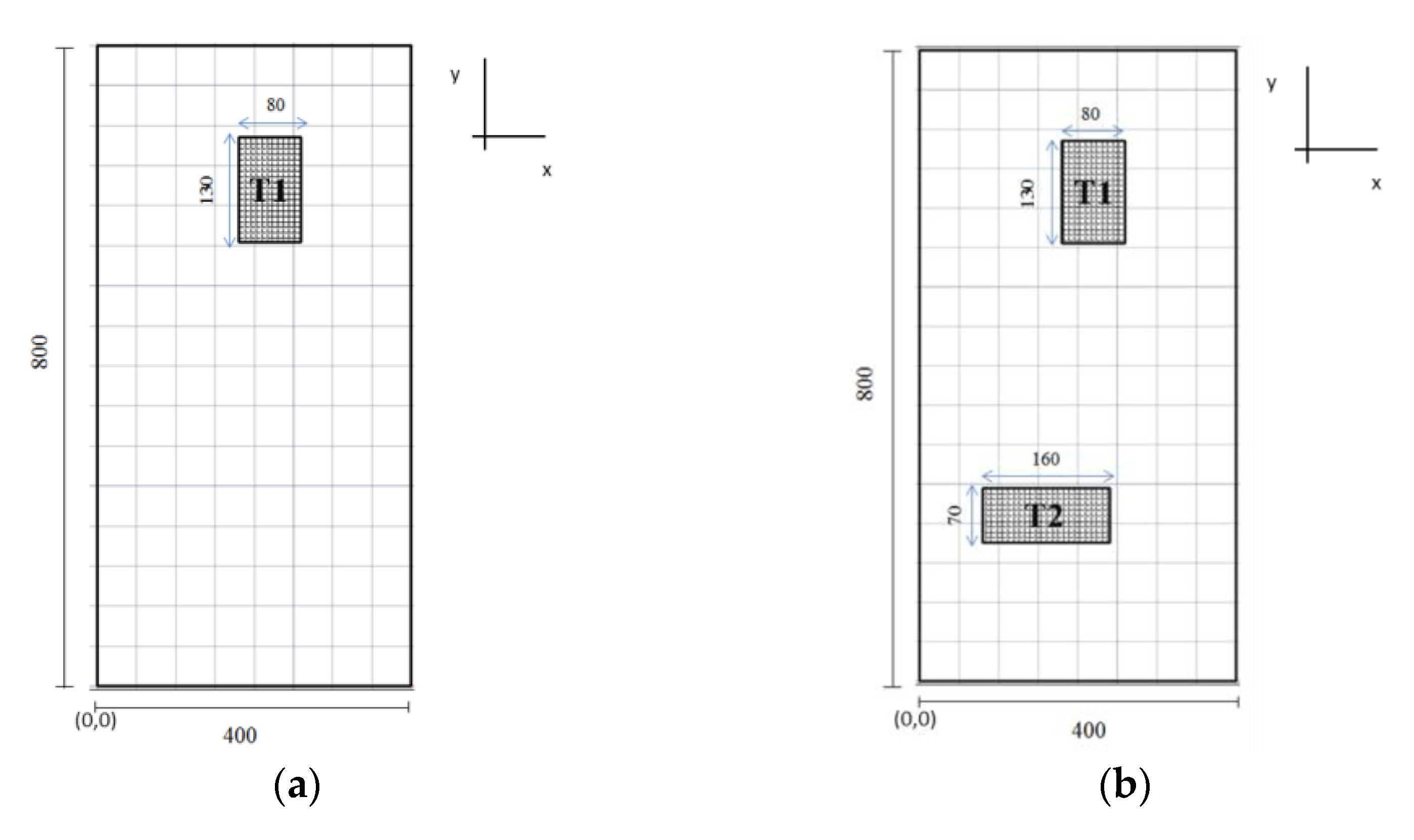
3.2. Generation of Locations for SLP
4. Results and Discussion
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
| Set of all temporary facilities to be allocated a position on site | |
| Set of all available locations within which temporary facilities will be allocated | |
| Stages in project schedule, indexed by g | |
| On-land transportation equipment, indexed by t |
| Notation | Description |
| Fgijt | Travel frequency of transportation equipment t, from facility i to facility j, during stage g |
| Crt | Cost of operating transportation equipment t |
| Equals one if location m is suitable for locating facility i | |
| W | Width of construction site, in the horizontal x direction |
| B | Length of construction site, in the vertical y direction |
| Wfi | Width of facility i in the x direction |
| Lfi | Length of facility i in the y direction |
| Dmn | Distance between locations m and n |
| CLXm | x-coordinate of centroid of location m |
| CLYm | y-coordinate of centroid of location m |
| WLm | Width of location m in the horizontal x direction |
| LLm | Length of location m in the vertical y direction |
| Notation | Description |
|---|---|
| zim ∈ {0,1} | Equals one if facility i is at location m |
| cix ≥ 0 | x-coordinate of centroid of facility i |
| ciy ≥ 0 | y-coordinate of centroid of facility i |
| Equals one if facility i and j do not overlap in the horizontal x direction | |
| Equals one if facility i and j do not overlap in the vertical y direction |
References
- Asadi, K.; Suresh, A.K.; Ender, A.; Gotad, S.; Maniyar, S.; Anand, S.; Noghabaei, M.; Han, K.; Lobaton, E.; Wu, T. An integrated UGV-UAV system for construction site data collection. Autom. Constr. 2020, 112, 103068. [Google Scholar] [CrossRef]
- Hawarneh, A.A.; Bendak, S.; Ghanim, F. Construction site layout planning problem: Past, present and future. Expert Syst. Appl. 2021, 168, 114247. [Google Scholar] [CrossRef]
- Sestras, P. Methodological and on-site applied construction layout plan with batter boards stake-out methods comparison: A case study of Romania. Appl. Sci. 2021, 11, 4331. [Google Scholar] [CrossRef]
- Tommelein, I.D.; Levitt, R.E.; Hayes-Roth, B. SightPlan model for site layout. J. Constr. Eng. Manag. 1992, 118, 749–766. [Google Scholar] [CrossRef]
- Kim, M.; Ryu, H.; Kim, T.W. A typology model of temporary facility constraints for automated construction site layout planning. Appl. Sci. 2021, 11, 1027. [Google Scholar] [CrossRef]
- Huang, C.; Wong, C.K. Optimisation of site layout planning for multiple construction stages with safety considerations and requirements. Autom. Constr. 2015, 53, 58–68. [Google Scholar] [CrossRef]
- Easa, S.M.; Hossain, K.M.A. New mathematical optimization model for construction site layout. J. Constr. Eng. Manag. 2008, 134, 653–662. [Google Scholar] [CrossRef]
- El-Rayes, K.; Khalafallah, A. Trade-off between safety and cost in planning construction site layouts. J. Constr. Eng. Manag. 2005, 131, 1186–1195. [Google Scholar] [CrossRef] [Green Version]
- Lam, K.C.; Tang, C.M.; Lee, W.C. Application of the entropy technique and genetic algorithms to construction site layout planning of medium-size projects. Constr. Manag. Econ. 2005, 23, 127–145. [Google Scholar] [CrossRef]
- Wong, C.K.; Fung, I.W.H.; Tam, C.M. Comparison of using mixed-integer programming and genetic algorithms for construction site facility layout planning. J. Constr. Eng. Manag. 2010, 136, 1116–1128. [Google Scholar] [CrossRef]
- Zhang, H.; Yu, L. Site layout planning for prefabricated components subject to dynamic and interactive constraints. Autom. Constr. 2021, 126, 103693. [Google Scholar] [CrossRef]
- Jacob-Loyola, N.; Rivera, F.M.; Herrera, R.F.; Atencio, E. Unmanned aerial vehicles (UAVs) for physical progress monitoring of construction. Sensors 2021, 21, 4227. [Google Scholar] [CrossRef]
- Petroutsatou, K.; Apostolidis, N.; Zarkada, A.; Ntokouo, A. Dynamic planning of construction site for linear projects. Infrastructures 2021, 6, 21. [Google Scholar] [CrossRef]
- Andayesh, M.; Sadeghpour, F. Dynamic site layout planning through minimization of total potential energy. Autom. Constr. 2013, 31, 92–102. [Google Scholar] [CrossRef]
- Andayesh, M.; Sadeghpour, F. The time dimension in site layout planning. Autom. Constr. 2014, 44, 129–139. [Google Scholar] [CrossRef]
- Elbeltagi, E.; Hegazy, T.; Eldosouky, A. Dynamic layout of construction temporary facilities considering safety. J. Constr. Eng. Manag. 2004, 130, 534–541. [Google Scholar] [CrossRef]
- Hammad, A.W.A.; Akbarnezhad, A.; Rey, D. A multi-objective mixed integer nonlinear programming model for construction site layout planning to minimise noise pollution and transport costs. Autom. Constr. 2016, 61, 73–85. [Google Scholar] [CrossRef]
- Xu, J.; Li, Z. Multi-objective dynamic construction site layout planning in fuzzy random environment. Autom. Constr. 2012, 27, 155–169. [Google Scholar] [CrossRef]
- Vacanas, Y.; Themistocleous, K.; Agapiou, A.; Hadjimitsis, D. Building information modelling (BIM) and unmanned aerial vehicle (UAV) technologies in infrastructure construction project management and delay and disruption analysis. In Proceedings of the Third International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2015), Paphos, Cyprus, 22 June 2015. [Google Scholar] [CrossRef]
- Zhou, Z.; Irizarry, J.; Lu, Y. A multidimensional framework for unmanned aerial system applications in construction project management. J. Manag. Eng. 2018, 34, 04018004. [Google Scholar] [CrossRef]
- Rizo-Maestre, C.; González-Avilés, Á.; Galiano-Garrigós, A.; Andújar-Montoya, M.D.; Puchol-García, J.A. UAV + BIM: Incorporation of photogrammetric techniques in architectural projects with building information modeling versus classical work processes. Remote Sens. 2020, 12, 2329. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Jeelani, I.; Gheisari, M. Safety challenges of UAV integration in construction: Conceptual analysis and future research roadmap. Saf. Sci. 2021, 144, 105473. [Google Scholar] [CrossRef]
- Lee, S.B.; Song, M.; Kim, S.; Won, J. Change monitoring at expressway infrastructure construction sites using drone. Sens. Mater. 2020, 32, 3923–3933. [Google Scholar] [CrossRef]
- Grosso, R.; Mecca, U.; Moglia, G.; Prizzon, F.; Rebaudengo, M. Collecting built environment information using UAVs: Time and applicability in building inspection activities. Sustainability 2020, 12, 4731. [Google Scholar] [CrossRef]
- Israr, A.; Abro, G.E.M.; Khan, M.S.A.; Farhan, M.; Zulkifli, S.A.B.M. Internet of things (IoT)-enable unmanned aerial vehicles for the inspection of construction sites: A vision and future directions. Math. Probl. Eng. 2021, 2021, 9931112. [Google Scholar] [CrossRef]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an unmanned aerial vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Ayele, Y.Z.; Aliyari, M.; Griffiths, D.; Droguett, E.L. Automatic crack segmentation for UAV-assisted bridge inspection. Energies 2020, 13, 6250. [Google Scholar] [CrossRef]
- Hardin, P.J.; Hardin, T.J. Small-scale remotely piloted vehicles in environmental research. Geogr. Compass 2010, 4, 1297–1311. [Google Scholar] [CrossRef]
- Zhang, Z. Review of 3D reconstruction technology of UAV aerial image. J. Phys. Conf. Ser. 2021, 1865, 042063. [Google Scholar] [CrossRef]
- Real, F.; Castaño, Á.R.; Torres-González, A.; Capitán, J.; Sánchez-Cuevas, P.J.; Fernández, M.J.; Villar, M.; Ollero, A. Experimental evaluation of a team of multiple unmanned aerial vehicles for cooperative construction. IEEE Access 2021, 9, 6817–6835. [Google Scholar] [CrossRef]
- Sestras, P.; Bilasco, S.; Rosca, S.; Dudic, B.; Hysa, A.; Spalevic, V. Geodetic and UAV monitoring in the sustainable management of shallow landslides and erosion of a susceptible urban environment. Remote Sens. 2021, 13, 385. [Google Scholar] [CrossRef]
- Gheisari, M.; Esmaeili, B. Applications and requirements of unmanned aerial systems (UASs) for construction safety. Saf. Sci. 2019, 118, 230–240. [Google Scholar] [CrossRef]
- Barmpounakis, E.; Geroliminis, N. On the new era of urban traffic monitoring with massive drone data: The pNEUMA large-scale field experiment. Transp. Res. Part. C Emerg. Technol. 2020, 111, 50–71. [Google Scholar] [CrossRef]
- Fernández, T.; Pérez, J.L.; Cardenal, J.; Gómez, J.M.; Colomo, C.; Delgado, J. Analysis of landslide evolution affecting olive groves using UAV and photogrammetric techniques. Remote Sens. 2016, 8, 837. [Google Scholar] [CrossRef] [Green Version]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Wing, M.G.; Burnett, J.D.; Sessions, J. Remote sensing and unmanned aerial system technology for monitoring and quantifying forest fire impacts. Int. J. Remote Sens. Appl. 2014, 4, 18–35. [Google Scholar] [CrossRef]
- Enríquez, C.; Jurado, J.M.; Bailey, A.; Callén, D.; Collado, M.J.; Espina, G.; Marroquín, P.; Oliva, E.; Osla, E.; Ramos, M.I.; et al. The UAS-based 3D image characterization of Mozarabic church ruins in Bobastro (Malaga), Spain. Remote Sens. 2020, 12, 2377. [Google Scholar] [CrossRef]
- Kerle, N.; Nex, F.; Gerke, M.; Duarte, D.; Vetrivel, A. UAV-based structural damage mapping: A review. Int. J. Geo-Inf. 2020, 9, 14. [Google Scholar] [CrossRef] [Green Version]
- Ezequiel, C.A.; Cua, M.; Libatique, N.C.; Tangonan, G.L.; Alampay, R.; Labuguen, R.T.; Favila, C.M.; Honrado, J.L.E.; Caños, V.; Devaney, C.; et al. UAV aerial imaging applications for post-disaster assessment, environmental management and infrastructure development. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014. [Google Scholar] [CrossRef]
- Calantropio, A. The use of UAVs for performing safety-related tasks at post-disaster and non-critical construction sites. Safety 2019, 5, 64. [Google Scholar] [CrossRef] [Green Version]
- Melo, R.R.S.; Costa, D.B.; Álvares, J.S.; Irizarry, J. Applicability of unmanned aerial system (UAS) for safety inspection on construction sites. Saf. Sci. 2017, 98, 174–185. [Google Scholar] [CrossRef]
- Kang, S.; Park, M.; Suh, W. Feasibility study of the unmanned-aerial-vehicle radio-frequency identification system for localizing construction materials on large-scale open sites. Sens. Mater. 2019, 31, 1449–1465. [Google Scholar] [CrossRef]
- Kang, D.; Cha, Y. Autonomous UAVs for structural health monitoring using deep learning and an ultrasonic beacon system with geo-tagging. Comput.-Aided Civil. Infrastruct. Eng. 2018, 33, 885–902. [Google Scholar] [CrossRef]
- Martinez, J.G.; Albeaino, G.; Gheisari, M.; Volkmann, W. UAS point cloud accuracy assessment using structure from motion-based photogrammetry and PPK georeferencing technique for building surveying applications. J. Comput. Civil. Eng. 2021, 35, 05020004. [Google Scholar] [CrossRef]
- Ellenberg, A.; Kontsos, A.; Moon, F.; Bartoli, I. Bridge related damage quantification using unmanned aerial vehicle imagery. Struct. Control Health Monit. 2016, 23, 1168–1179. [Google Scholar] [CrossRef]
- Albeaino, G.; Gheisari, M. Trends, benefits, and barriers of unmanned aerial systems in the construction industry: A survey study in the United States. J. Inf. Technol. Constr. 2021, 26, 84–111. [Google Scholar] [CrossRef]
- Varbla, S.; Ellmann, A.; Puust, R. Centimetre-range deformations of built environment revealed by drone-based photogrammetry. Autom. Constr. 2021, 128, 103787. [Google Scholar] [CrossRef]
- Tian, J.; Luo, S.; Wang, X.; Hu, J.; Yin, J. Crane lifting optimization and construction monitoring in steel bridge construction project based on BIM and UAV. Adv. Civil. Eng. 2021, 2021, 5512229. [Google Scholar] [CrossRef]
- Sestras, P.; Rosca, S.; Bilasco, S.; Nas, S.; Buru, S.M.; Kovacs, L.; Spalevic, V.; Sestras, A.F. Feasibility assessments using unmanned aerial vehicle technology in heritage buildings: Rehabilitation-restoration, spatial analysis and tourism potential analysis. Sensors 2020, 20, 2054. [Google Scholar] [CrossRef] [Green Version]
- Leksono, B.E.; Soedomo, A.S.; Apriani, L.; Sugito, N.T.; Rabbani, A. Acceleration of land certification with unmanned aerial vehicle in Cisumdawu toll road construction area. Indones. J. Geogr. 2019, 51, 1–8. [Google Scholar] [CrossRef]
- Freeman, M.R.; Kashani, M.M.; Vardanega, P.J. Aerial robotic technologies for civil engineering: Established and emerging practice. J. Unmanned Veh. Sytems 2021, 9, 75–91. [Google Scholar] [CrossRef]
- Jiang, W.; Zhou, Y.; Ding, L.; Zhou, C.; Ning, X. UAV-based 3D reconstruction for hoist site mapping and layout planning in petrochemical construction. Autom. Constr. 2020, 113, 103137. [Google Scholar] [CrossRef]
- Vanderhorst, H.R.; Suresh, S.; Suresh, R. Systematic literature research of the current implementation of unmanned aerial system (UAS) in the construction industry. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 416–428. [Google Scholar] [CrossRef]
- Bang, S.; Kim, H. Context-based information generation for managing UAV-acquired data using image captioning. Autom. Constr. 2020, 112, 103116. [Google Scholar] [CrossRef]
- Castilla, F.J.; Ramón, A.; Adán, A.; Trenado, A.; Fuentes, D. 3D sensor-fusion for the documentation of rural heritage buildings. Remote Sens. 2021, 13, 1337. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Carvajal-Ramírez, F.; Yero-Paneque, L.; Agüera-Vega, F. Combination of HBIM and UAV photogrammetry for modelling and documentation of forgotten heritage. Case study: Isabel II dan in Níjar (Almería, Spain). Herit. Sci. 2021, 9, 95. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, L.; Tian, T.; Yin, J. A review of unmanned aerial vehicle low-altitude remote sensing (UAV-LARS) use in agricultural monitoring in China. Remote Sens. 2021, 13, 1221. [Google Scholar] [CrossRef]
- Martinez, J.G.; Gheisari, M.; Alarcón, L.F. UAV integration in current construction safety planning and monitoring process: Case study of a high-rise building construction project in Chile. J. Manag. Eng. 2020, 36, 05020005. [Google Scholar] [CrossRef]
- Alizadehsalehi, S.; Yitmen, I.; Celik, T.; Arditi, D. The effectiveness of an integrated BIM/UAV model in managing safety on construction sites. Int. J. Occup. Saf. Ergon. 2020, 26, 829–844. [Google Scholar] [CrossRef]
- Han, K.K.; Lin, J.J.; Golparvar-Fard, M. A formalism for utilization of autonomous vision-based systems and integrated project models for construction progress monitoring. In Proceedings of the Conference on Autonomous and Robotic Construction of Infrastructure, Ames, IA, USA, 2–3 June 2015; Available online: https://lib.dr.iastate.edu/intrans_reports/141 (accessed on 20 June 2021).
- Álvares, J.S.; Costa, D.B. Construction progress monitoring using unmanned aerial system and 4D BIM. In Proceedings of the 27th Annual Conference of the International. Grupo para Construção Enxuta (IGLC), Dublin, Irlanda, 3–5 July 2019; pp. 1445–1456. [Google Scholar]
- Cheng, M.; Chang, N. Dynamic construction material layout planning optimization model by integrating 4D BIM. Eng. Comput. 2019, 35, 703–720. [Google Scholar] [CrossRef]
- Abune’meh, M.; El Meouche, R.; Hijaze, I.; Mebarki, A.; Shahrour, I. Optimal construction site layout based on risk spatial variability. Autom. Constr. 2016, 70, 167–177. [Google Scholar] [CrossRef]
- Wei, J.; Chen, G.; Huang, J.; Xu, L.; Yang, Y.; Wang, J.; Sadick, A. BIM and GIS applications in bridge projects: A critical review. Appl. Sci. 2021, 11, 6207. [Google Scholar] [CrossRef]
- Lee, D.; Lee, S. Digital twin for supply chain coodination in modular construction. Appl. Sci. 2021, 11, 5909. [Google Scholar] [CrossRef]
- Liu, A.H.; Ellful, C.; Swiderska, M. Decision making in the 4th dimension—Exploring use cases and technical options for the integration of 4D BIM and GIS during construction. Int. J. Geo-Inf. 2021, 10, 203. [Google Scholar] [CrossRef]
- Khan, M.S.; Park, J.; Seo, J. Geotechnical property modeling and construction safety zoning based on GIS and BIM integration. Appl. Sci. 2021, 11, 4004. [Google Scholar] [CrossRef]
- Worboys, M.F.; Duckham, M. GIS: A Computing Perspective; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Zhu, J.; Wu, P. A common approach to geo-referencing building models in industry foundation classes for BIM/GIS integration. Int. J. Geo-Inf. 2021, 10, 362. [Google Scholar] [CrossRef]
- Liu, X.; Shannon, J.; Voun, H.; Truijens, M.; Chi, H.L.; Wang, X. Spatial and temporal analysis on the distribution of active radio-frequency identification (RFID) tracking accuracy with the kriging method. Sensors 2014, 14, 20451–20467. [Google Scholar] [CrossRef] [Green Version]
- Sarasanty, D. Safety hazards identification of construction site layout based on geographic information system (GIS). Int. J. Adv. Sci. Eng. Inf. Technol. 2020, 10, 2021–2027. [Google Scholar] [CrossRef]
- Le, P.L.; Dao, T.M.; Chaabane, A. BIM-based framework for temporary facility layout planning in construction site: A hybrid approach. Constr. Innov. 2019, 19, 424–464. [Google Scholar] [CrossRef]
- Pepe, M.; Constantino, D.; Alfio, V.S.; Restuccia, A.G.; Papalino, N.M. Scan to BIM for the digital management and representation in 3D GIS environment of cultural heritage site. J. Cult. Herit. 2021, 50, 115–125. [Google Scholar] [CrossRef]
- Irizarry, J.; Karan, E.P.; Jalaei, F. Integrating BIM and GIS to improve the visual monitoring of construction supply chin management. Autom. Constr. 2013, 31, 241–254. [Google Scholar] [CrossRef]
- Nguyen, P.T. Construction site layout planning and safety management using fuzzy-based bee colony optimization model. Neural Comput. Appl. 2021, 33, 5821–5842. [Google Scholar] [CrossRef]
- Han, K.K.; Golparvar-Fard, M. Automated monitoring of operation-level construction progress using 4D bim and daily site photologs. In Proceedings of the Construction Research Congress: Construction in a Global Network (CRC 2014), Atlanta, GA, USA, 19–21 May 2014. [Google Scholar]
- Bang, S.; Kim, H.; Kim, H. UAV-based automatic generation of high-resolution panorama at a construction site with focus on preprocessing for image stitching. Autom. Constr. 2017, 84, 70–80. [Google Scholar] [CrossRef]
- Anwar, N.; Najam, F.A.; Izhar, M.A. Construction monitoring and reporting using drones and unmanned aerial vehicles (UAVs). In Proceedings of the Tenth International Conference on Construction in the 21st Century (CITC-10), Colombo, Sri lanka, 2–4 July 2018. [Google Scholar]




| Parameter | Value |
|---|---|
| Dimensions | 43.8 × 45.1 × 30.1 cm |
| Weight | 2.93 kg |
| Camera resolution | UHD (4K): 4096 × 2160 p24/25 |
| Speed | 22 m/s (max) |
| Field of view | 94° |
| Battery capacity | 4500 mAh |
| Wind resistance | 10 m/s |
| Facility | Position (Stage 1) | Position (Stage 2) |
|---|---|---|
| Steel yard | (325,523) | (243,321) |
| Storage 1 | (357,530) | (196,281) |
| Storage 2 | (78,678) | (105,221) |
| Generators | (231,596) | (41,121) |
| Formwork yard | (227,632) | (163,200) |
| Offices | (389,450) | (389,450) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hammad, A.W.A.; da Costa, B.B.F.; Soares, C.A.P.; Haddad, A.N. The Use of Unmanned Aerial Vehicles for Dynamic Site Layout Planning in Large-Scale Construction Projects. Buildings 2021, 11, 602. https://doi.org/10.3390/buildings11120602
Hammad AWA, da Costa BBF, Soares CAP, Haddad AN. The Use of Unmanned Aerial Vehicles for Dynamic Site Layout Planning in Large-Scale Construction Projects. Buildings. 2021; 11(12):602. https://doi.org/10.3390/buildings11120602
Chicago/Turabian StyleHammad, Ahmed W. A., Bruno B. F. da Costa, Carlos A. P. Soares, and Assed N. Haddad. 2021. "The Use of Unmanned Aerial Vehicles for Dynamic Site Layout Planning in Large-Scale Construction Projects" Buildings 11, no. 12: 602. https://doi.org/10.3390/buildings11120602