
Toward Material Property Extraction from Dynamic Spherical Indentation Experiments on Hardening Polycrystalline Metals

Abstract
:1. Introduction
2. Review: Static Indentation
2.1. Elastic Indentation
2.2. Elastic–Plastic Indentation
2.3. Constitutive Property Extraction
- Existence: there exists a solution to the problem.
- Uniqueness: there is, at most, one solution to the problem.
- Stability: the solution continuously depends on the data.
- Accuracy: how closely the inverse solution matches the exact solution.
3. Review: Dynamic Indentation
3.1. Dynamic Elastic–Plastic Indentation
3.2. Survey of Prior Analytical and Numerical Modeling
- Elastic–plastic deformation characterized by an elastic core separating the plastic zone from the contact interface;
- Initial surface plastic deformation encountered upon disappearance of the elastic core and occurrence of maximum local plastic strain in the subsurface;
- Transient fully plastic deformation, where maximum local plastic strain shifts close to the contact interface and increases with indentation depth;
- Steady full plastic deformation, wherein represents static material hardness. This state is achieved for rate-insensitive materials at sufficient depths, when inertial effects become negligible.
3.3. Indentation Strain Rate
3.4. Summary: Dynamic versus Static Indentation
- A time scale enters the problem for dynamics but not statics;
- The indentation strain rate is finite for dynamics, so the rate sensitivity of the plastic response affects dynamics but not statics;
- Inertial effects (i.e., stress waves) appear for dynamics but not statics;
- Due to inertia, mass density is pertinent for dynamics but not statics;
- Adiabatic heating may arise for dynamics but not for statics under conventional thermal boundary conditions;
- Due to adiabatic heating, specific heat and thermal softening properties may be important for dynamics but not statics;
- Both static and dynamic friction could be important for dynamics but only the former for statics in the limit of zero relative interface velocities;
- Under severe impact, nonlinear elasticity and thermal expansion affecting shock waves would arise for dynamics, but shock waves are irrelevant for static loading.
4. Extension: Dynamic Dimensional Analysis
4.1. Variable Identification
- Indentation force P;
- Indentation contact radius a;
- Plastic work of indentation :
- Mean pressure and the constraint factor measured relative to the initial static isothermal yield strength, hereafter redefined as ;
- Indentation depth h and maximum depth ;
- Effective indentation (system) velocity ;
- Indenter radius R;
- Initial temperature ;
- Substrate elastic properties (dropping subscripts) E, ;
- Substrate plastic properties , , m, n, r, , ;
- Substrate initial mass density and specific heat per unit mass .
- Stress: modulus E;
- Length: indenter radius R;
- Time: viscoplastic time scale ;
- Temperature: plastic thermal susceptibility .
- Indentation depth and maximum depth ;
- Indentation rate ;
- Yield strength ;
- Elastic wave speed via , where ;
- Reference temperature and initial temperature ;
- Dimensionless elastic and plastic properties , , m, n, r.
4.2. Functional Forms
5. Application: Analysis of Instrumented Dynamic Indentation Data
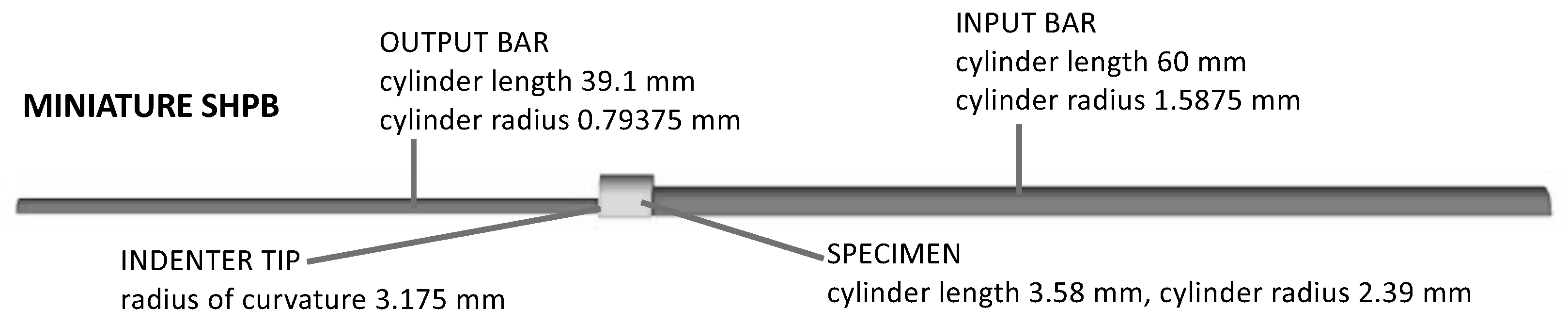
5.1. Experimental Protocols
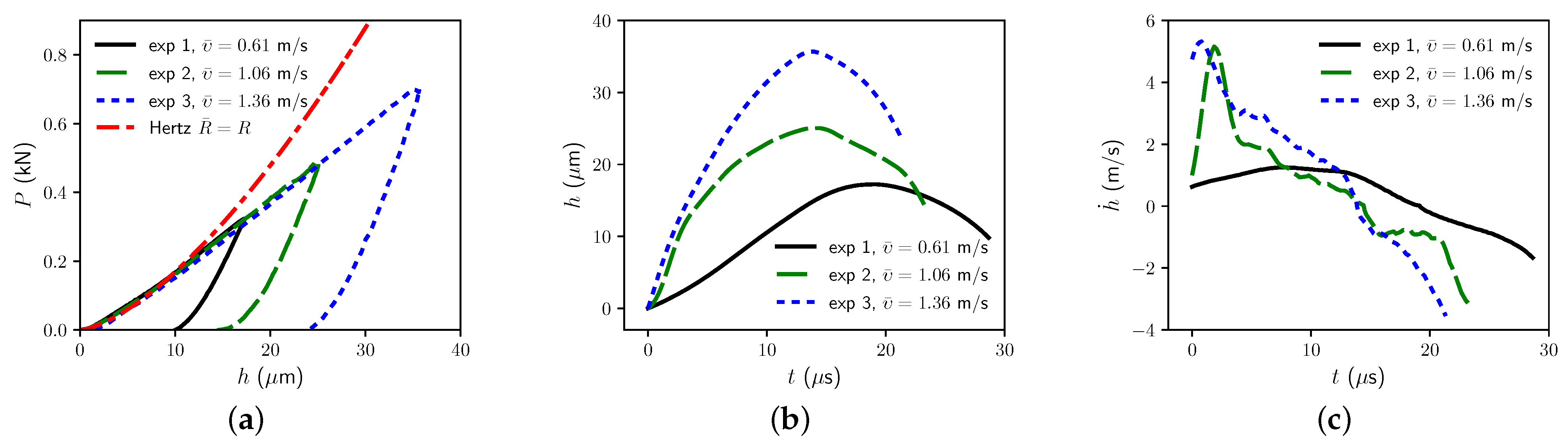
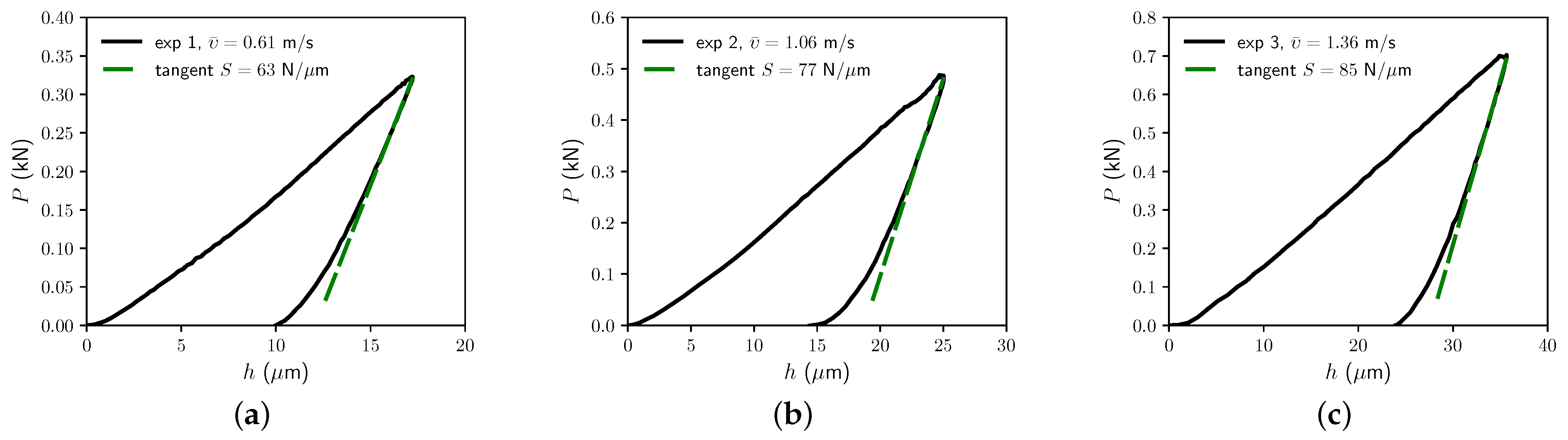
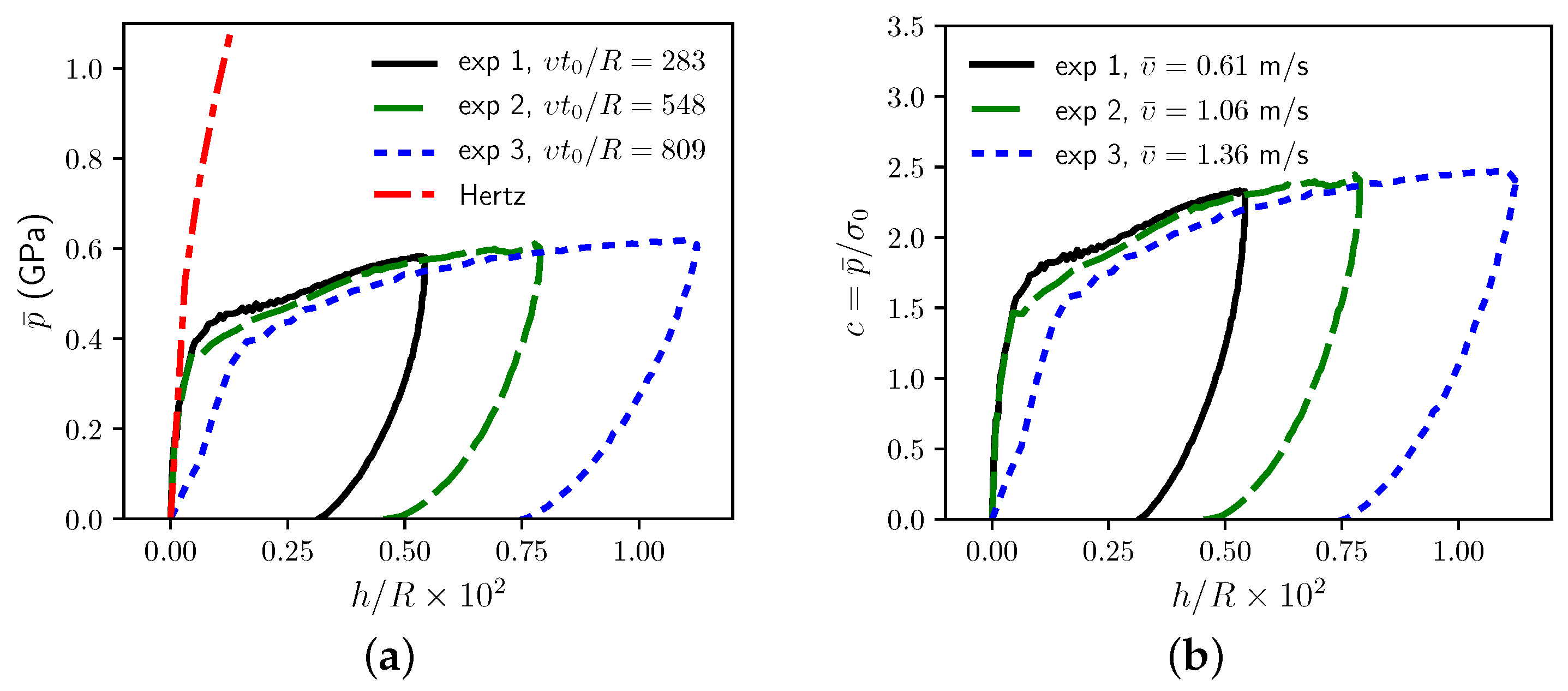
5.2. Data Analysis: Global Response
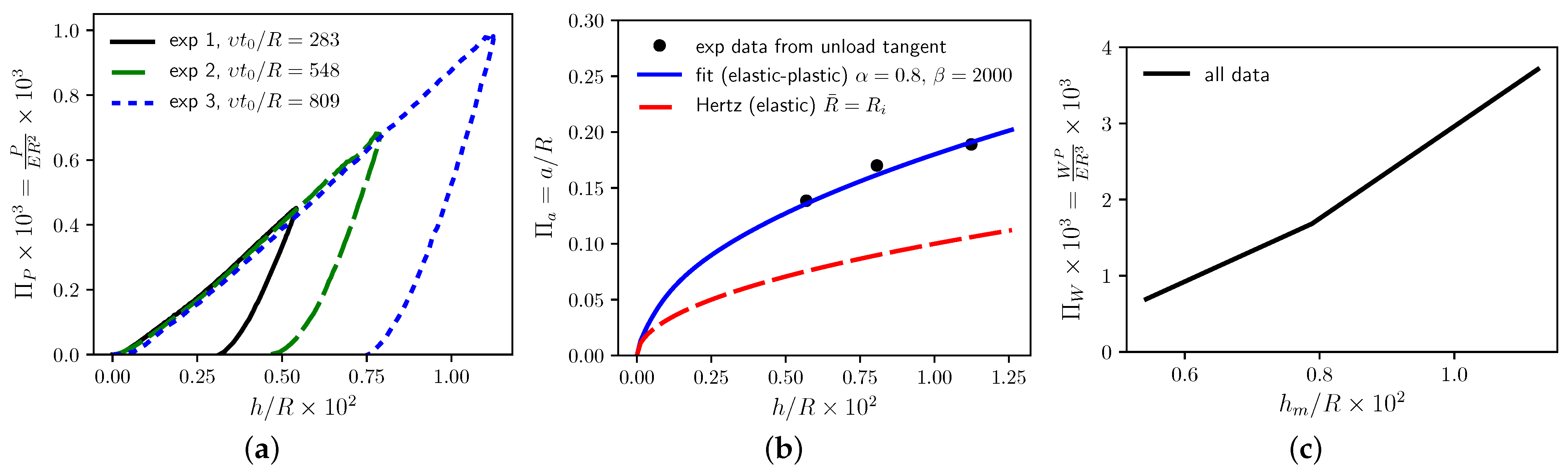
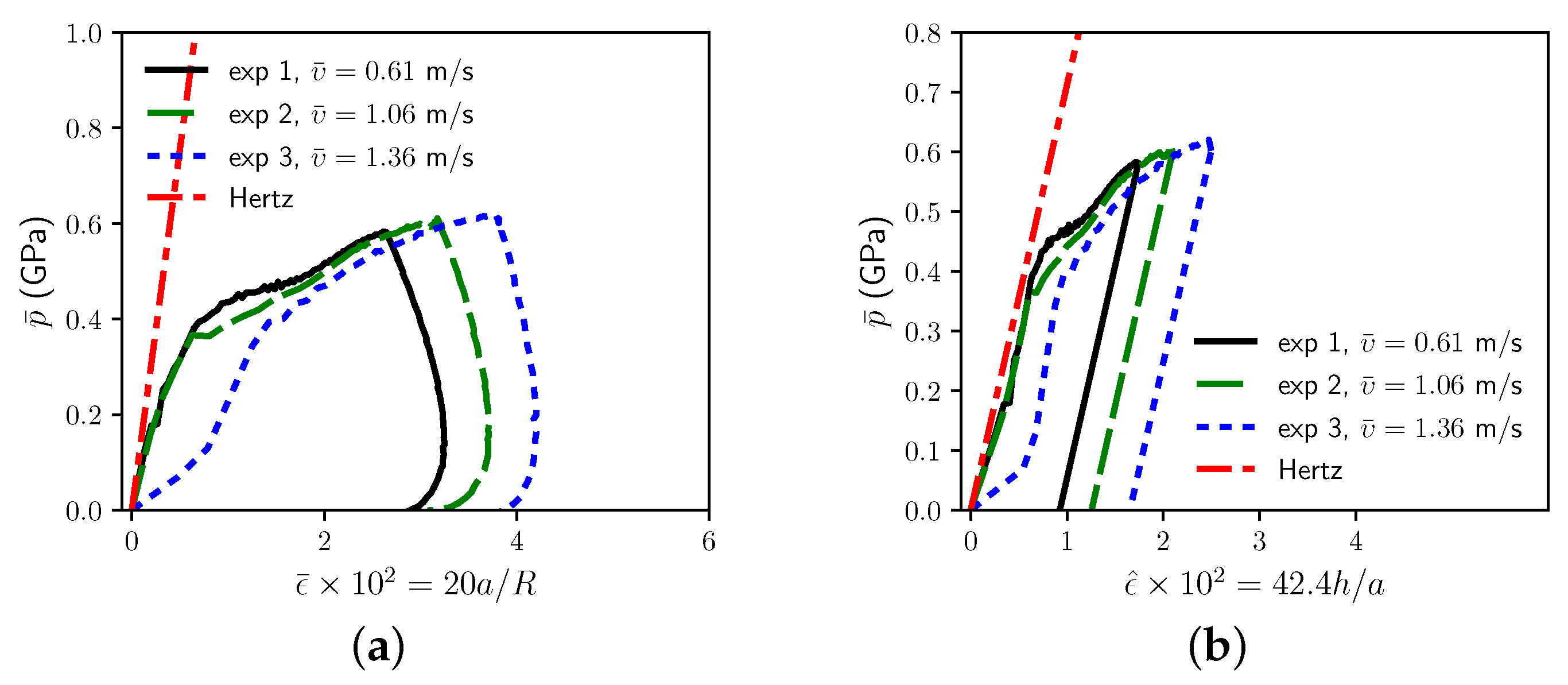
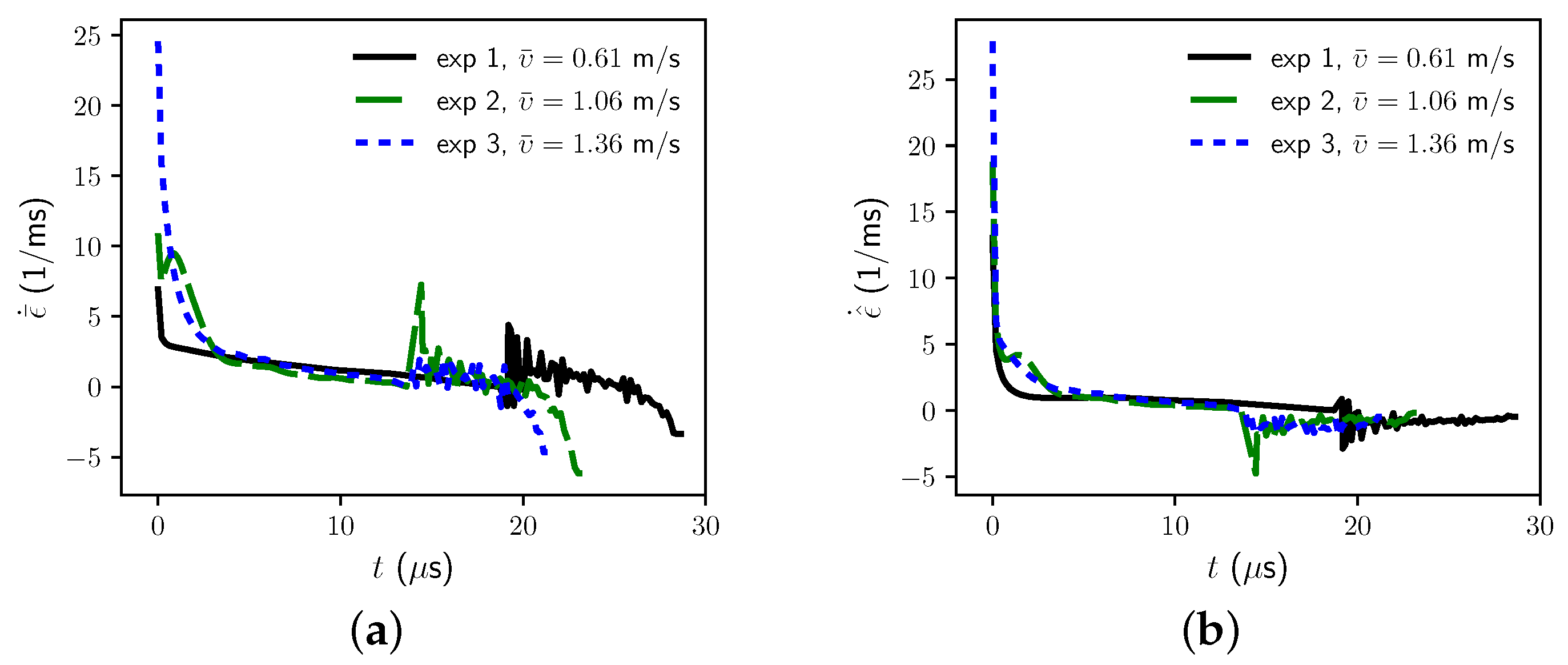
5.3. Data Analysis: Indentation Stress–Strain and Other Extracted Information
5.4. Summary and Recommendations
- Maximum uniaxial-equivalent strains are estimated from maximum indentation strains to be on the order of 1% to 2%;
- Average uniaxial-equivalent strain rates are estimated from indentation strain rates to be on the order of 700 to 1500/s;
- Subtle variations in indentation force–depth curves can lead to drastic changes in indentation stress–strain curves, particularly at small indentation depths;
- Mean pressure (i.e., indentation stress) shows evidence of yielding and mild-to-moderate strain-hardening characteristic in uniaxial stress–strain data for the aluminum alloy 6061-T6;
- Strain rate and inertial effects are not detected among the experimental datasets, whereby an increase in average indentation strain rate by a factor of 2 produces no apparent increase in indentation stress;
- A negligible effect of average strain rate correlates with the low strain-rate sensitivity of flow stress for the aluminum alloy, as measured in traditional SHPB experiments;
- Plastic work results in a trivially small adiabatic temperature rise (2K) averaged over the entire plastically deformed zone, though magnitudes of localized temperature increases at plastic strain concentrations are unknown.
- Given versus for different effective loading strain rates and initial temperatures , determine the eleven material properties . (The list of sought properties is reduced to nine if and are regarded as fixed universal constants.)
- The relatively small magnitudes of impact velocities and the similarities of static and dynamic indentation curves suggest that inertial effects associated with cannot be discerned in the data. Thus, a standard (e.g., Archimedes) method should be used to measure .
- The relatively low changes in average temperature suggest that effects of specific heat capacity cannot be easily discerned in the force response data. Thus, a standard (e.g., calorimetry) method should be used to measure .
- Precision of current experimental methods in the very small-depth regime is likely insufficient to directly ascertain elastic compliance via comparison with Hertz’s solution. Elastic (shallow) force–depth data also seem unable to delineate E and distinctly, since P depends only on and not E and independently in the Hertz solution. Thus, a standard (e.g., longitudinal and shear wave speed) method should be used to measure E and . Any experimental facility equipped for dynamic instrumented indentation should include the capability for such sound speed measurements, presuming material samples are available.
- The precision of current experimental methods is likely inadequate for determination of an “exact” initial yield stress . However, an offset yield stress should be measurable, which can provide an approximate value of as in static experiments [37].
- For low loading rates or rate-insensitive materials, extraction of static hardening parameters and n should be possible from measured increases of with increasing , though unique determination of both parameters may or may not be difficult.
- Effects of loading rate on for highly rate-sensitive materials remains unknown. Experiments on other solids with much greater strain-rate sensitivity of flow stress are needed to determine if such rate sensitivity manifests in dynamic indentation force–displacement (and corresponding indentation stress–strain) curves over comparable domains of average indentation strain rates. If differences in at vastly different do not manifest for such materials, the present experimental method might be unsuitable to extract rate sensitivity parameters (e.g., m, or C if (15) is used).
- Presumably, systematic matching of experimental data with results of parametric FE simulations on the same geometry (sample size and R), loading rate history, and initial temperature, and covering a sufficient domain of possible material property sets, will produce the sought material property relationships. Similar efforts have been undertaken for static indentation, as reviewed in Section 2.3, though most not invoking dimensional analysis techniques.
- The existence, uniqueness, stability, and accuracy of the inverse method should be verified for multiple materials, with constitutive properties validated by comparison with values obtained from independent, alternative experimental techniques (e.g., standard SHPB compression tests rather than dynamic indentation).
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| a | projected contact radius | [length] |
| radius of residual imprint | [length] | |
| A | projected contact area | [length] |
| c | spherical constraint factor | [-] |
| specific heat capacity | [force·length/mass·temperature] | |
| C | strain-rate sensitivity of ref. [93] | [-] |
| elastic wave speed | [length/time] | |
| E | elastic modulus | [force/length] |
| h | total indentation depth | [length] |
| elastic indentation depth | [length] | |
| indenter indentation depth | [length] | |
| maximum indentation depth | [length] | |
| residual indentation depth | [length] | |
| substrate indentation depth | [length] | |
| H | spherical indentation (Meyer’s) hardness | [force/length] |
| indentation stiffness | [force/length] | |
| m | strain-rate sensitivity exponent | [-] |
| n | strain-hardening exponent | [-] |
| mean indentation pressure | [force/length] | |
| P | total indentation force | [force] |
| q | thermal softening exponent of ref. [93] | [-] |
| r | thermal softening exponent of ref. [4] | [-] |
| R | radius of rigid indenter | [length] |
| radius of indenter | [length] | |
| radius of substrate | [length] | |
| indentation system radius | [length] | |
| S | unloading slope | [force/length] |
| t | time | [time] |
| reference time (inverse strain rate) | [time] | |
| T | absolute temperature | [temperature] |
| initial temperature | [temperature] | |
| melt temperature | [temperature] | |
| reference temperature | [temperature] | |
| normalization temperature | [temperature] | |
| mean temperature rise | [temperature] | |
| local plastic work density | [force/length] | |
| plastic work of indentation | [force·length] | |
| total strain | [-] | |
| elastic strain | [-] | |
| plastic strain | [-] | |
| indentation strain of ref. [44] | [-] | |
| indentation strain of ref. [5] | [-] | |
| indentation strain of ref. [46] | [-] | |
| total strain rate | [1/time] | |
| elastic strain rate | [1/time] | |
| plastic strain rate | [1/time] | |
| reference strain rate | [1/time] | |
| strain hardening coefficient | [-] | |
| Poisson’s ratio | [-] | |
| dimensionless contact radius | [-] | |
| dimensionless indentation force | [-] | |
| dimensionless plastic work | [-] | |
| current mass density | [mass/length] | |
| initial mass density | [mass/length] | |
| local von Mises stress | [force/length] | |
| mean indentation flow stress of ref. [44] | [force/length] | |
| mean indentation flow stress of ref. [5] | [force/length] | |
| initial athermal static yield strength | [force/length] | |
| indentation system velocity | [length/time] | |
| average velocity of input bar | [length/time] | |
| Taylor–Quinney ratio | [-] |
References
- Weaver, J.; Khosravani, A.; Castillo, A.; Kalidindi, S. High throughput exploration of process-property linkages in Al-6061 using instrumented spherical microindentation and microstructurally graded samples. Integr. Mater. Manuf. Innov. 2016, 5, 192–211. [Google Scholar] [CrossRef] [Green Version]
- Taljat, B.; Zacharia, T.; Kosel, F. New analytical procedure to determine stress-strain curve from spherical indentation data. Int. J. Solids Struct. 1998, 35, 4411–4426. [Google Scholar] [CrossRef]
- Mesarovic, S.; Fleck, N. Spherical indentation of elastic–plastic solids. Proc. R. Soc. Lond. A 1999, 455, 2707–2728. [Google Scholar] [CrossRef]
- Clayton, J. Spherical Indentation in Elastoplastic Materials: Modeling and Simulation; Technical Report ARL-TR-3516; US Army Research Laboratory, Aberdeen Proving Ground: Adelphi, MD, USA, 2005. [Google Scholar]
- Pathak, S.; Kalidindi, S. Spherical nanoindentation stress–strain curves. Mater. Sci. Eng. R 2015, 91, 1–36. [Google Scholar] [CrossRef] [Green Version]
- Field, J.; Swain, M. A simple predictive model for spherical indentation. J. Mater. Res. 1993, 8, 297–306. [Google Scholar] [CrossRef]
- Cheng, Y.T.; Cheng, C.M. Scaling, dimensional analysis, and indentation measurements. Mater. Sci. Eng. R 2004, 44, 91–149. [Google Scholar] [CrossRef]
- Barick, M.; Gaillard, Y.; Lejeune, A.; Amiot, F.; Richard, F. On the uniqueness of intrinsic viscoelastic properties of materials extracted from nanoindentation using FEMU. Int. J. Solids Struct. 2020, 202, 929–946. [Google Scholar] [CrossRef]
- Chen, X.; Hutchinson, J.; Evans, A. The mechanics of indentation induced lateral cracking. J. Am. Ceram. Soc. 2005, 88, 1233–1238. [Google Scholar] [CrossRef]
- Armstrong, R. On size effects in polycrystal plasticity. J. Mech. Phys. Solids 1961, 9, 196–199. [Google Scholar] [CrossRef]
- Voyiadjis, G.; Yaghoobi, M. Review of nanoindentation size effect: Experiments and atomistic simulation. Crystals 2017, 7, 321. [Google Scholar] [CrossRef]
- Voyiadjis, G.; Yaghoobi, M. Size Effects in Plasticity: From Macro to Nano; Academic Press: London, UK, 2019. [Google Scholar]
- Armstrong, R. Dislocation mechanics pile-up and thermal activation roles in metal plasticity and fracturing. Metals 2019, 9, 154. [Google Scholar] [CrossRef] [Green Version]
- Abu Al-Rub, R.; Voyiadjis, G. Analytical and experimental determination of the material intrinsic length scale of strain gradient plasticity theory from micro-and nano-indentation experiments. Int. J. Plast. 2004, 20, 1139–1182. [Google Scholar] [CrossRef]
- Voyiadjis, G.; Song, Y. Strain gradient continuum plasticity theories: Theoretical, numerical and experimental investigations. Int. J. Plast. 2019, 121, 21–75. [Google Scholar] [CrossRef]
- Zubelewicz, A. Mechanisms-based transitional viscoplasticity. Crystals 2020, 10, 212. [Google Scholar] [CrossRef] [Green Version]
- Clayton, J.; Aydelotte, B.; Becker, R.; Hilton, C.; Knap, J. Continuum modelling and simulation of indentation in transparent single crystalline minerals and energetic solids. In Applied Nanoindentation in Advanced Materials; Tiwari, A., Ed.; Wiley: Hoboken, NJ, USA, 2017; Chapter 15; pp. 347–368. [Google Scholar]
- Knap, J.; Ortiz, M. Effect of indenter-radius size on Au (001) nanoindentation. Phys. Rev. Lett. 2003, 90, 226102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Buckingham, E. On physically similar systems; illustrations of the use of dimensional equations. Phys. Rev. 1914, 4, 345–376. [Google Scholar] [CrossRef]
- Sedov, L. Similarity and Dimensional Methods in Mechanics; Academic Press: London, UK, 1959. [Google Scholar]
- Ni, W.; Cheng, Y.T.; Cheng, C.M.; Grummon, D. An energy-based method for analyzing instrumented spherical indentation experiments. J. Mater. Res. 2004, 19, 149–157. [Google Scholar] [CrossRef]
- Clayton, J. Penetration resistance of armor ceramics: Dimensional analysis and property correlations. Int. J. Impact Eng. 2015, 85, 124–131. [Google Scholar] [CrossRef]
- Lee, A.; Komvopoulos, K. Dynamic spherical indentation of strain hardening materials with and without strain rate dependent deformation behavior. Mech. Mater. 2019, 133, 128–137. [Google Scholar] [CrossRef]
- Johnson, K. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Ghaednia, H.; Wang, X.; Saha, S.; Xu, Y.; Sharma, A.; Jackson, R. A review of elastic–plastic contact mechanics. Appl. Mech. Rev. 2017, 69, 060804. [Google Scholar] [CrossRef]
- Kalidindi, S.; Pathak, S. Determination of the effective zero-point and the extraction of spherical nanoindentation stress–strain curves. Acta Mater. 2008, 56, 3523–3532. [Google Scholar] [CrossRef]
- Clayton, J.; Becker, R. Modeling Nonlinear Elastic-Plastic Behavior of RDX Single Crystals during Indentation; Technical Report ARL-TR-5864; US Army Research Laboratory, Aberdeen Proving Ground: Adelphi, MD, USA, 2005. [Google Scholar]
- Oliver, W.; Pharr, G. An improved technique for determining hardness and elastic modulus using load and displacement sensing indentation experiments. J. Mater. Res. 1992, 7, 1564–1583. [Google Scholar] [CrossRef]
- Dao, M.; Chollacoop, N.; Van Vliet, K.; Venkatesh, T.; Suresh, S. Computational modeling of the forward and reverse problems in instrumented sharp indentation. Acta Mater. 2001, 49, 3899–3918. [Google Scholar] [CrossRef] [Green Version]
- Chollacoop, N.; Dao, M.; Suresh, S. Depth-sensing instrumented indentation with dual sharp indenters. Acta Mater. 2003, 51, 3713–3729. [Google Scholar] [CrossRef]
- Cao, Y.P.; Lu, J. A new method to extract the plastic properties of metal materials from an instrumented spherical indentation loading curve. Acta Mater. 2004, 52, 4023–4032. [Google Scholar] [CrossRef]
- Johnson, K. The correlation of indentation experiments. J. Mech. Phys. Solids 1970, 18, 115–126. [Google Scholar] [CrossRef]
- Zhao, M.; Ogasawara, N.; Chiba, N.; Chen, X. A new approach to measure the elastic–plastic properties of bulk materials using spherical indentation. Acta Mater. 2006, 54, 23–32. [Google Scholar] [CrossRef]
- Phadikar, J.; Bogetti, T.; Karlsson, A. Aspects of experimental errors and data reduction schemes from spherical indentation of isotropic materials. J. Eng. Mater. Technol. 2014, 136, 031005. [Google Scholar] [CrossRef]
- Le, M.Q. Material characterization by instrumented spherical indentation. Mech. Mater. 2012, 46, 42–56. [Google Scholar] [CrossRef]
- Donohue, B.; Ambrus, A.; Kalidindi, S. Critical evaluation of the indentation data analyses methods for the extraction of isotropic uniaxial mechanical properties using finite element models. Acta Mater. 2012, 60, 3943–3952. [Google Scholar] [CrossRef]
- Patel, D.; Kalidindi, S. Correlation of spherical nanoindentation stress-strain curves to simple compression stress-strain curves for elastic-plastic isotropic materials using finite element models. Acta Mater. 2016, 112, 295–302. [Google Scholar] [CrossRef] [Green Version]
- Fernandez-Zelaia, P.; Joseph, V.; Kalidindi, S.; Melkote, S. Estimating mechanical properties from spherical indentation using Bayesian approaches. Mater. Des. 2018, 147, 92–105. [Google Scholar] [CrossRef]
- Lu, L.; Dao, M.; Kumar, P.; Ramamurty, U.; Karniadakis, G.; Suresh, S. Extraction of mechanical properties of materials through deep learning from instrumented indentation. Proc. Natl. Acad. Sci. USA 2020, 117, 7052–7062. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, G.; Zhang, X.; Zhong, J.; Shi, J.; Wang, Q.; Guan, K. New inverse method for determining uniaxial flow properties by spherical indentation test. Chin. J. Mech. Eng. 2021, 34, 94. [Google Scholar] [CrossRef]
- Simo, J.; Hughes, T. Computational Inelasticity; Springer: New York, NY, USA, 1998. [Google Scholar]
- Francis, H. Phenomenological analysis of plastic spherical indentation. J. Eng. Mater. Technol. 1976, 98, 272–281. [Google Scholar] [CrossRef]
- Matthews, J. Indentation hardness and hot pressing. Acta Metall. 1980, 28, 311–318. [Google Scholar] [CrossRef]
- Tabor, D. The Hardness of Metals; Oxford University Press: Oxford, UK, 1951. [Google Scholar]
- Hill, R.; Storåkers, B.; Zdunek, A. A theoretical study of the Brinell hardness test. Proc. R. Soc. Lond. A 1989, 423, 301–330. [Google Scholar]
- Lee, A.; Komvopoulos, K. Dynamic spherical indentation of elastic-plastic solids. Int. J. Solids Struct. 2018, 146, 180–191. [Google Scholar] [CrossRef]
- Follansbee, P.; Sinclair, G. Quasi-static normal indentation of an elasto-plastic half-space by a rigid sphere–I: Analysis. Int. J. Solids Struct. 1984, 20, 81–91. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Nix, W. Finite element simulation of indentation experiments. Int. J. Solids Struct. 1988, 24, 881–891. [Google Scholar] [CrossRef]
- Lee, H.; Lee, J.H.; Pharr, G. A numerical approach to spherical indentation techniques for material property evaluation. J. Mech. Phys. Solids 2005, 53, 2037–2069. [Google Scholar] [CrossRef]
- Moussa, C.; Hernot, X.; Bartier, O.; Delattre, G.; Mauvoisin, G. Identification of the hardening law of materials with spherical indentation using the average representative strain for several penetration depths. Mater. Sci. Eng. A 2014, 606, 409–416. [Google Scholar] [CrossRef] [Green Version]
- Moussa, C.; Hernot, X.; Bartier, O.; Delattre, G.; Mauvoisin, G. Evaluation of the tensile properties of a material through spherical indentation: Definition of an average representative strain and a confidence domain. J. Mater. Sci. 2014, 49, 592–603. [Google Scholar] [CrossRef] [Green Version]
- Arizzi, F.; Rizzi, E. Elastoplastic parameter identification by simulation of static and dynamic indentation tests. Model. Simul. Mater. Sci. Eng. 2014, 22, 035017. [Google Scholar] [CrossRef]
- Dean, J.; Clyne, T. Extraction of plasticity parameters from a single test using a spherical indenter and FEM modelling. Mech. Mater. 2017, 105, 112–122. [Google Scholar] [CrossRef]
- Huber, N.; Tsakmakis, C. Determination of constitutive properties from spherical indentation data using neural networks. Part I: The case of pure kinematic hardening in plasticity laws. J. Mech. Phys. Solids 1999, 47, 1569–1588. [Google Scholar] [CrossRef]
- Huber, N.; Tsakmakis, C. Determination of constitutive properties from spherical indentation data using neural networks. Part II: Plasticity with nonlinear isotropic and kinematic hardening. J. Mech. Phys. Solids 1999, 47, 1589–1607. [Google Scholar] [CrossRef]
- Wang, M.; Wang, W. An inverse method for measuring elastoplastic properties of metallic materials using Bayesian model and residual imprint from spherical indentation. Materials 2021, 14, 7105. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.T.; Cheng, C.M. Relationships between hardness, elastic modulus, and the work of indentation. Appl. Phys. Lett. 1998, 73, 614–616. [Google Scholar] [CrossRef]
- Cheng, Y.T.; Li, Z.; Cheng, C.M. Scaling relationships for indentation measurements. Philos. Mag. A 2002, 82, 1821–1829. [Google Scholar] [CrossRef]
- Chen, X.; Ogasawara, N.; Zhao, M.; Chiba, N. On the uniqueness of measuring elastoplastic properties from indentation: The indistinguishable mystical materials. J. Mech. Phys. Solids 2007, 55, 1618–1660. [Google Scholar] [CrossRef]
- Liu, L.; Ogasawara, N.; Chiba, N.; Chen, X. Can indentation technique measure unique elastoplastic properties. J. Mater. Res. 2009, 24, 784–800. [Google Scholar] [CrossRef]
- Cao, Y.; Lu, J. Depth-sensing instrumented indentation with dual sharp indenters: Stability analysis and corresponding regularization schemes. Acta Mater. 2004, 52, 1143–1153. [Google Scholar] [CrossRef]
- Barick, M. Identification of the Viscoelastic-Viscoplastic Properties of Materials by Instrumented Nanoindentation. Ph.D. Thesis, Université Bourgogne Franche-Comté, Besançon, France, 2020. [Google Scholar]
- Clayton, J. Nonlinear Mechanics of Crystals; Springer: Dordrecht, The Netherlands, 2011. [Google Scholar]
- Wu, J.; Wang, M.; Hui, Y.; Zhang, Z.; Fan, H. Identification of anisotropic plasticity properties of materials using spherical indentation imprint mapping. Mater. Sci. Eng. A 2018, 723, 269–278. [Google Scholar] [CrossRef]
- Clayton, J.; Becker, R. Elastic-plastic behavior of cyclotrimethylene trinitramine single crystals under spherical indentation: Modeling and simulation. J. Appl. Phys. 2012, 111, 063512. [Google Scholar] [CrossRef]
- Patel, D.; Al-Harbi, H.; Kalidindi, S. Extracting single-crystal elastic constants from polycrystalline samples using spherical nanoindentation and orientation measurements. Acta Mater. 2014, 79, 108–116. [Google Scholar] [CrossRef]
- Choi, I.C.; Yoo, B.G.; Kim, Y.J.; Jang, J.I. Indentation creep revisited. J. Mater. Res. 2012, 27, 3–11. [Google Scholar] [CrossRef]
- Yang, S.; Lu, W.; Ling, X. Spherical indentation creep characteristics and local deformation analysis of 310S stainless steel. Eng. Fail. Anal. 2020, 118, 104946. [Google Scholar] [CrossRef]
- Ogbonna, N.; Fleck, N.; Cocks, A. Transient creep analysis of ball indentation. Int. J. Mech. Sci. 1995, 37, 1179–1202. [Google Scholar] [CrossRef]
- Huber, N.; Tyulyukovskiy, E. A new loading history for identification of viscoplastic properties by spherical indentation. J. Mater. Res. 2004, 19, 101–113. [Google Scholar] [CrossRef]
- Mohammed, Y.; Stone, D.; Elmustafa, A. Strain rate sensitivity of hardness in indentation creep with conical and spherical indenters taking into consideration elastic deformations. Int. J. Solids Struct. 2021, 212, 143–151. [Google Scholar] [CrossRef]
- Clayton, J. A continuum description of nonlinear elasticity, slip and twinning, with application to sapphire. Proc. R. Soc. Lond. A 2009, 465, 307–334. [Google Scholar] [CrossRef]
- Clayton, J.; Knap, J. A phase field model of deformation twinning: Nonlinear theory and numerical simulations. Phys. D 2011, 240, 841–858. [Google Scholar] [CrossRef] [Green Version]
- Clayton, J.; Knap, J. Phase field modeling of twinning in indentation of transparent single crystals. Model. Simul. Mater. Sci. Eng. 2011, 19, 085005. [Google Scholar] [CrossRef]
- Clayton, J.; Lloyd, J. A dynamic finite-deformation constitutive model for steels undergoing slip, twinning, and phase changes. J. Dyn. Behav. Mater. 2021, 7, 217–247. [Google Scholar] [CrossRef]
- Clayton, J.; Lloyd, J. Finite strain continuum theory for phase transformations in ferromagnetic elastic-plastic solids. Contin. Mech. Thermodyn. 2022, 34, 1579–1620. [Google Scholar] [CrossRef]
- Leavy, R.; Clayton, J.; Strack, O.; Brannon, R.; Strassburger, E. Edge on impact simulations and experiments. Procedia Eng. 2013, 58, 445–452. [Google Scholar] [CrossRef]
- Clayton, J.; Guziewski, M.; Ligda, J.; Leavy, R.; Knap, J. A multi-scale approach for phase field modeling of ultra-hard ceramic composites. Materials 2021, 14, 1408. [Google Scholar] [CrossRef]
- Clayton, J. Modeling deformation and fracture of boron-based ceramics with nonuniform grain and phase boundaries and thermal-residual stress. Solids 2022, 3, 643–664. [Google Scholar] [CrossRef]
- Mok, C.H.; Duffy, J. The dynamic stress-strain relation of metals as determined from impact tests with a hard ball. Int. J. Mech. Sci. 1965, 7, 355–371. [Google Scholar] [CrossRef]
- Tirupataiah, Y.; Sundararajan, G. A dynamic indentation technique for the characterization of the high strain rate plastic flow behaviour of ductile metals and alloys. J. Mech. Phys. Solids 1991, 39, 243–271. [Google Scholar] [CrossRef]
- Sundararajan, G.; Tirupataiah, Y. The localization of plastic flow under dynamic indentation conditions: I. Experimental results. Acta Mater. 2006, 54, 565–575. [Google Scholar] [CrossRef]
- Sundararajan, G.; Tirupataiah, Y. The localization of plastic flow under dynamic indentation conditions: II. Analysis of results. Acta Mater. 2006, 54, 577–586. [Google Scholar] [CrossRef]
- Wen, Y.; Xie, L.; Wang, Z.; Wang, L.; Lu, W.; Zhang, L.C. Nanoindentation characterization on local plastic response of Ti-6Al-4V under high-load spherical indentation. J. Mater. Res. Technol. 2019, 8, 3434–3442. [Google Scholar] [CrossRef]
- Anton, R.; Subhash, G. Dynamic Vickers indentation of brittle materials. Wear 2000, 239, 27–35. [Google Scholar] [CrossRef]
- Subhash, G. Dynamic indentation testing. ASM Handb. Mech. Test. Eval. 2000, 8, 519–529. [Google Scholar]
- Li, S.; Haozhe, L. A new technique of dynamic spherical indentation based on SHPB. In Dynamic Behavior of Materials; Song, B., Casem, D., Kimberley, J., Eds.; Springer: Cham, Switzerland, 2014; Volume 1, pp. 81–87. [Google Scholar]
- Casem, D. A Model for a Kolsky Bar Experiment: Application to Experiment Design; Technical Report ARL-TR-9416; DEVCOM Army Research Laboratory, Aberdeen Proving Ground: Adelphi, MD, USA, 2022. [Google Scholar]
- Lu, J.; Suresh, S.; Ravichandran, G. Dynamic indentation for determining the strain rate sensitivity of metals. J. Mech. Phys. Solids 2003, 51, 1923–1938. [Google Scholar] [CrossRef]
- Calle, M.; Mazzariol, L.; Alves, M. Strain rate sensitivity assessment of metallic materials by mechanical indentation tests. Mater. Sci. Eng. 2018, 725, 274–282. [Google Scholar] [CrossRef]
- Mallick, D.; Zhao, M.; Parker, J.; Kannan, V.; Bosworth, B.; Sagapuram, D.; Foster, M.; Ramesh, K. Laser-driven flyers and nanosecond-resolved velocimetry for spall studies in thin metal foils. Exp. Mech. 2019, 59, 611–628. [Google Scholar] [CrossRef]
- Clayton, J. Nonlinear Elastic and Inelastic Models for Shock Compression of Crystalline Solids; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Johnson, G.; Cook, W. A constitutive model and data for materials subjected to large strains, high strain rates, and high temperatures. In Proceedings of the 7th International Symposium on Ballistics, The Hague, The Netherlands, 19–21 April 1983; pp. 541–547. [Google Scholar]
- Ito, K.; Arai, M. Expanding cavity model combined with Johnson-Cook constitutive equation for the dynamic indentation problem. J. Eng. Mater. Technol. 2020, 142, 021005. [Google Scholar] [CrossRef]
- Rosakis, P.; Rosakis, A.; Ravichandran, G.; Hodowany, J. A thermodynamic internal variable model for the partition of plastic work into heat and stored energy in metals. J. Mech. Phys. Solids 2000, 48, 581–607. [Google Scholar] [CrossRef]
- Clayton, J. Dynamic plasticity and fracture in high density polycrystals: Constitutive modeling and numerical simulation. J. Mech. Phys. Solids 2005, 53, 261–301. [Google Scholar] [CrossRef]
- Zubelewicz, A. Century-long Taylor-Quinney interpretation of plasticity-induced heating reexamined. Sci. Rep. 2019, 9, 1–7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zerilli, F.; Armstrong, R. Dislocation-mechanics-based constitutive relations for material dynamics calculations. J. Appl. Phys. 1987, 61, 1816–1825. [Google Scholar] [CrossRef] [Green Version]
- Preston, D.; Tonks, D.; Wallace, D. Model of plastic deformation for extreme loading conditions. J. Appl. Phys. 2003, 93, 211–220. [Google Scholar] [CrossRef] [Green Version]
- Zubelewicz, A. Metal behavior at extreme loading rates: Thermodynamics. Phys. Rev. B 2008, 77, 214111. [Google Scholar] [CrossRef]
- Voyiadjis, G.; Almasri, A. A physically based constitutive model for fcc metals with applications to dynamic hardness. Mech. Mater. 2008, 40, 549–563. [Google Scholar] [CrossRef]
- Si, B.; Li, Z.; Xiao, G.; Shu, X. Determination of mechanical properties from sharp dynamic indentation. J. Strain Anal. Eng. Des. 2022, 57, 607–613. [Google Scholar] [CrossRef]
- Berthoud, P.; Baumberger, T.; G’sell, C.; Hiver, J.M. Physical analysis of the state-and rate-dependent friction law: Static friction. Phys. Rev. B 1999, 59, 14313–14327. [Google Scholar] [CrossRef]
- Baumberger, T.; Berthoud, P.; Caroli, C. Physical analysis of the state-and rate-dependent friction law. II. Dynamic friction. Phys. Rev. B 1999, 60, 3928–3939. [Google Scholar] [CrossRef]
- Kren, A.; Rudnitskii, V.; Lantsman, G.; Khudoley, A. Influence of the dynamic indentation parameters on the behavior of metals during the penetration of an indenter with a spherical tip. Russ. Metall. 2021, 2021, 563–569. [Google Scholar] [CrossRef]
- Kumaraswamy, A.; Rao, V. High strain-rate plastic flow behavior of Ti-6Al-4V from dynamic indentation experiments. Mater. Sci. Eng. A 2011, 528, 1238–1241. [Google Scholar] [CrossRef]
- Ito, K.; Arai, M. Simple estimation method for strain rate sensitivity based on the difference between the indentation sizes formed by spherical-shaped impactors. Int. J. Mech. Sci. 2021, 189, 106007. [Google Scholar] [CrossRef]
- Kashfi, M.; Goodarzi, S.; Rastgou, M. Plastic properties determination using virtual dynamic spherical indentation test and machine learning algorithms. J. Mech. Sci. Technol. 2022, 36, 325–331. [Google Scholar] [CrossRef]
- Yew, C.H.; Goldsmith, W. Stress distributions in soft metals due to static and dynamic loading by a steel sphere. ASME J. Appl. Mech. 1964, 31, 635–646. [Google Scholar] [CrossRef]
- Rudnitsky, V.; Djakovicht, V. Material testing by the method of dynamic indentation. Nondestruct. Test. Eval. 1996, 12, 253–261. [Google Scholar] [CrossRef]
- Nobre, J.; Dias, A.; Gras, R. Resistance of a ductile steel surface to spherical normal impact indentation: Use of a pendulum machine. Wear 1997, 211, 226–236. [Google Scholar] [CrossRef]
- Clough, R.; Webb, S.; Armstrong, R. Dynamic hardness measurements using a dropped ball: With application to 1018 steel. Mater. Sci. Eng. A 2003, 360, 396–407. [Google Scholar] [CrossRef]
- Liu, B.; Soares, C. Effect of strain rate on dynamic responses of laterally impacted steel plates. Int. J. Mech. Sci. 2019, 160, 307–317. [Google Scholar] [CrossRef]
- Meguid, S.; Shagal, G.; Stranart, J.; Daly, J. Three-dimensional dynamic finite element analysis of shot-peening induced residual stresses. Finite Elem. Anal. Des. 1999, 31, 179–191. [Google Scholar] [CrossRef]
- Almasri, A.; Voyiadjis, G. Effect of strain rate on the dynamic hardness in metals. ASME J. Eng. Mater. Technol. 2007, 129, 505–512. [Google Scholar] [CrossRef]
- dos Santos, T.; Srivastava, A.; Rodríguez-Martínez, J. The combined effect of size, inertia and porosity on the indentation response of ductile materials. Mech. Mater. 2021, 153, 103674. [Google Scholar] [CrossRef]
- Nguyen, N.V.; Kim, J.; Kim, S.E. Methodology to extract constitutive equation at a strain rate level from indentation curves. Int. J. Mech. Sci. 2019, 152, 363–377. [Google Scholar] [CrossRef]
- Atkins, A.; Tabor, D. Plastic indentation in metals with cones. J. Mech. Phys. Solids 1965, 13, 149–164. [Google Scholar] [CrossRef]
- Casem, D.; Pittari, J.; Swab, J. High-rate indentation using miniature Kolsky bar methods. In Dynamic Behavior of Materials; Mates, S., Eliasson, V., Eds.; Springer: Cham, Switzerland, 2022; Volume 1, pp. 63–65. [Google Scholar]
- Casem, D.; Grunschel, S.; Schuster, B. Normal and transverse displacement interferometers applied to small diameter Kolsky bars. Exp. Mech. 2012, 52, 173–184. [Google Scholar] [CrossRef]
- Wu, B.; Cao, Y.; Zhao, J.; Ding, W. The effect of superimposed ultrasonic vibration on tensile behavior of 6061-T6 aluminum alloy. Int. J. Adv. Manuf. Technol. 2021, 116, 1843–1854. [Google Scholar] [CrossRef]
- Zhu, D.; Mobasher, B.; Rajan, S.; Peralta, P. Characterization of dynamic tensile testing using aluminum alloy 6061-T6 at intermediate strain rates. ASCE J. Eng. Mech. 2011, 137, 669–679. [Google Scholar] [CrossRef]
- Lesuer, D.; Kay, G.; LeBlanc, M. Modeling Large-Strain, High-Rate Deformation in Metals; Technical Report UCRL-JC-134118; Lawrence Livermore National Laboratory: Livermore, CA, USA, 2001. [Google Scholar]
- Clayton, J.; Casem, D.; Lloyd, J.; Retzlaff, E. Toward Material Property Extraction from Dynamic Spherical Indentation Experiments; Technical Report ARL-TR-9520; US Army Research Laboratory, Aberdeen Proving Ground: Adelphi, MD, USA, 2022. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Units) | Value | Definition | Source |
|---|---|---|---|
| E (GPa) | 71.0 | modulus of Al 6061-T6 | Wu et al. [121] |
| (-) | 0.33 | Poisson’s ratio of Al 6061-T6 | Wu et al. [121] |
| (g/cm) | 2.77 | mass density of Al 6061-T6 | Wu et al. [121] |
| (J/kg·K) | 896 | specific heat of Al 6061-T6 | Zhu et al. [122] |
| (GPa) | 0.25 | initial yield strength of Al 6061-T6 | Lesuer et al. [123], Zhu et al. [122] |
| (-) | 0.35–1.8 | hardening coefficient range of Al 6061-T6 | Lesuer et al. [123], Zhu et al. [122] |
| n (-) | 0.38–0.43 | hardening exponent range of Al 6061-T6 | Lesuer et al. [123], Zhu et al. [122] |
| C (-) | 0.002–0.083 | rate sensitivity range of Al 6061-T6 | Lesuer et al. [123], Zhu et al. [122], Casem et al. [120] |
| q (-) | 1.34 | thermal softening of Al 6061-T6 | Lesuer et al. [123] |
| (1/s) | 1.0 | reference strain rate (universal) | Zhu et al. [122] |
| (K) | 925 | melt temperature of Al 6061-T6 | Zhu et al. [122] |
| (K) | 294 | reference temperature (ambient) | Zhu et al. [122] |
| (GPa) | 71.2 | system modulus with WC indenter | Weaver et al. [1] |
| R (mm) | 3.175 | indenter radius | this work |
| Experiment | (m/s) | (m) | (m) | (mJ) | (K) | (1/s) | (1/s) | (m/s) | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.61 | 17.2 | 421 | 1.57 | 1.15 | 0.0265 | 0.0174 | 1386 | 908 | 0.90 |
| 2 | 1.06 | 25.0 | 508 | 3.82 | 1.59 | 0.0320 | 0.0209 | 2217 | 1452 | 1.74 |
| 3 | 1.36 | 35.7 | 606 | 8.43 | 2.06 | 0.0382 | 0.0250 | 2750 | 1801 | 2.57 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Clayton, J.D.; Casem, D.T.; Lloyd, J.T.; Retzlaff, E.H. Toward Material Property Extraction from Dynamic Spherical Indentation Experiments on Hardening Polycrystalline Metals. Metals 2023, 13, 276. https://doi.org/10.3390/met13020276
Clayton JD, Casem DT, Lloyd JT, Retzlaff EH. Toward Material Property Extraction from Dynamic Spherical Indentation Experiments on Hardening Polycrystalline Metals. Metals. 2023; 13(2):276. https://doi.org/10.3390/met13020276
Chicago/Turabian StyleClayton, John D., Daniel T. Casem, Jeffrey T. Lloyd, and Emily H. Retzlaff. 2023. "Toward Material Property Extraction from Dynamic Spherical Indentation Experiments on Hardening Polycrystalline Metals" Metals 13, no. 2: 276. https://doi.org/10.3390/met13020276