The Direct-Coupling Method for Analyzing the Performance of Aerostatic Bearings Considering the Fluid–Structure Interaction Effect


Abstract
:1. Introduction
2. DCM-Based FSI Model
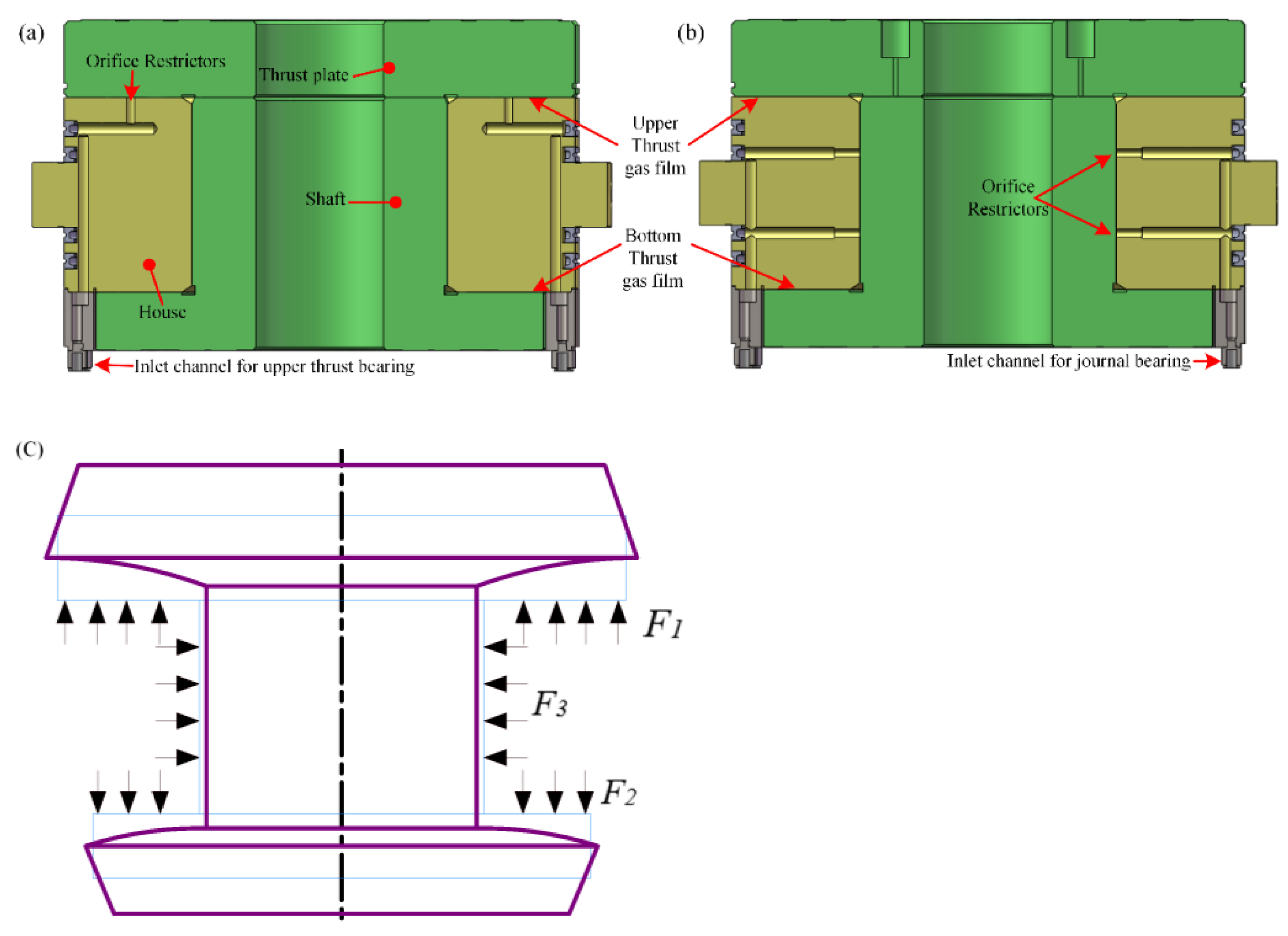
2.1. Modeling Background
2.2. The Governing Equations of FSI Systems
- (a)
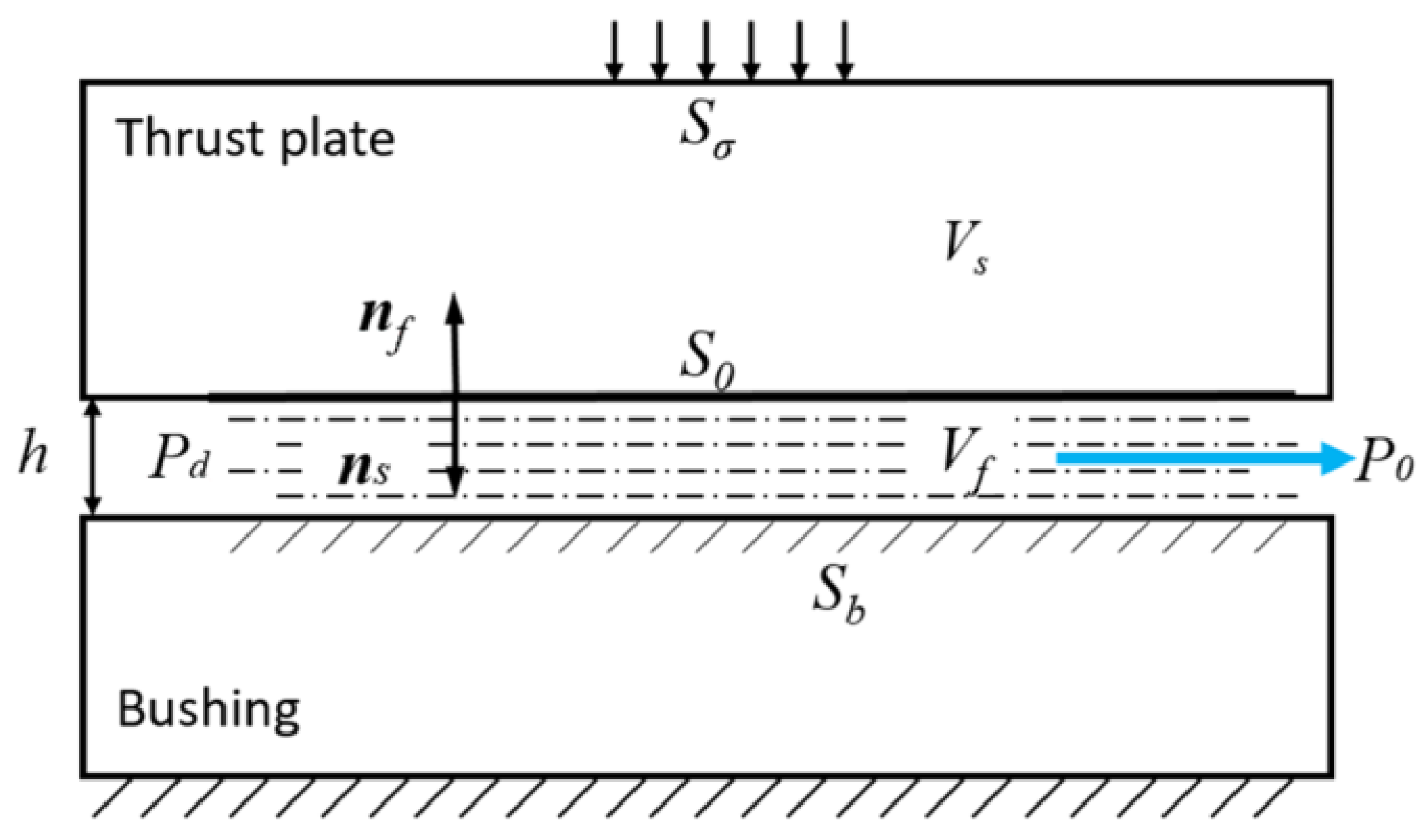
- Kinematic boundary conditions: In the gas film region, when the gas enters, the velocity slip phenomenon is ignored; that is, as the gas enters the gas film region, its normal velocity remains continuous. At the same time, it is assumed that the Reynolds equation describes the velocity field in the gas film region. During the static analysis, the velocity at the junction of the solid and gas is set to zero. On the other hand, in the dynamic model, the gas motion must be described by the dynamic Reynolds equation.
- (b)
- Dynamic boundary conditions: The normal force is continuous at the junction of the solid and gas. At the same time, for the solid domain, the following three boundary conditions should also be met:where denotes the boundary condition of displacement, and p represents the boundaries of traction. The pressure at the gas boundary should meet the following conditions:
2.3. The Procedure for Solving FSI Model Based on DCM
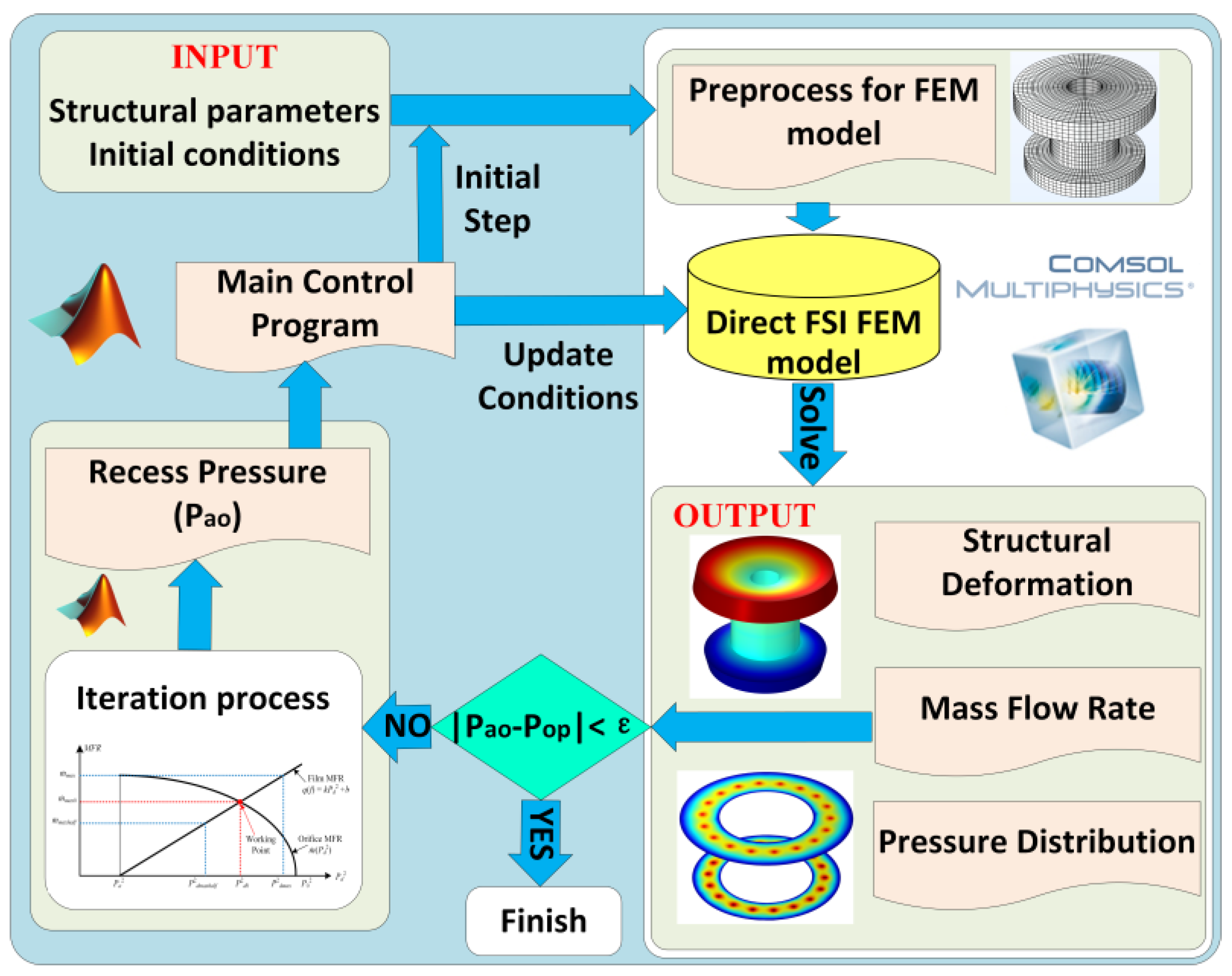
2.4. The Calculation Procedure
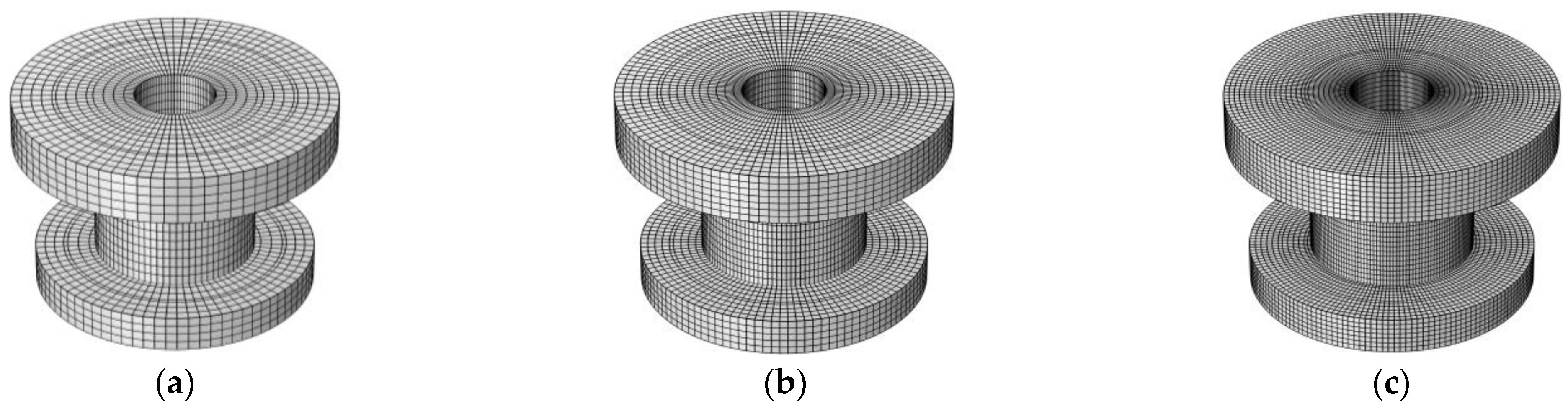
- Firstly, it is important to establish a finite element model for the spindle structure and use the Fluid module of COMSOL to perform preprocessing, such as boundary condition setting and the mesh division of the gas film. As the initial boundary condition for the gas film region, the gas pressure flowing out of the orifice into the pressure-equalizing groove is used, and the contact between the gas film and the air is used as the outer boundary, where the outer boundary condition is set to 1 bar pressure.
- The FEM model adopts the global solution method to solve the pressure distribution, flow and structural deformation of the aerostatic bearing.
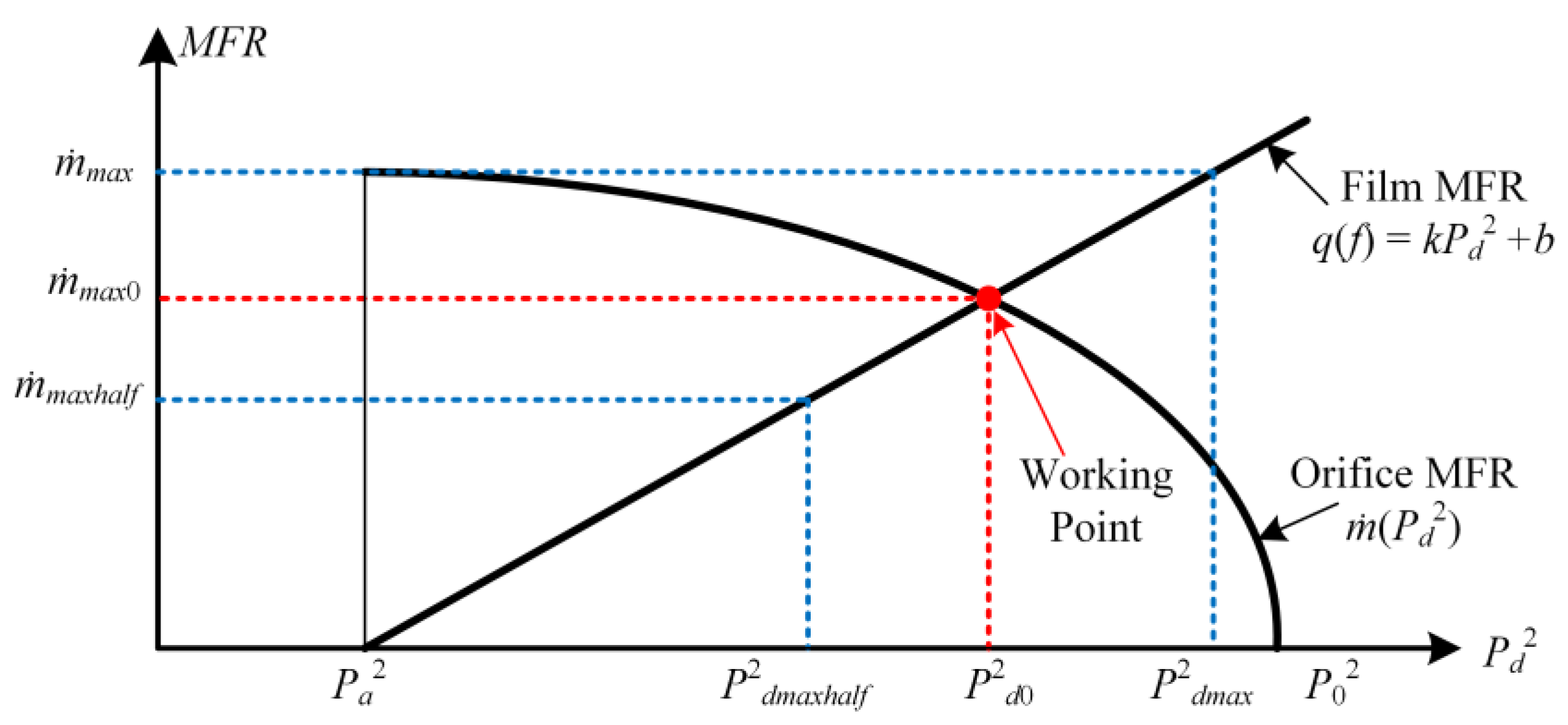
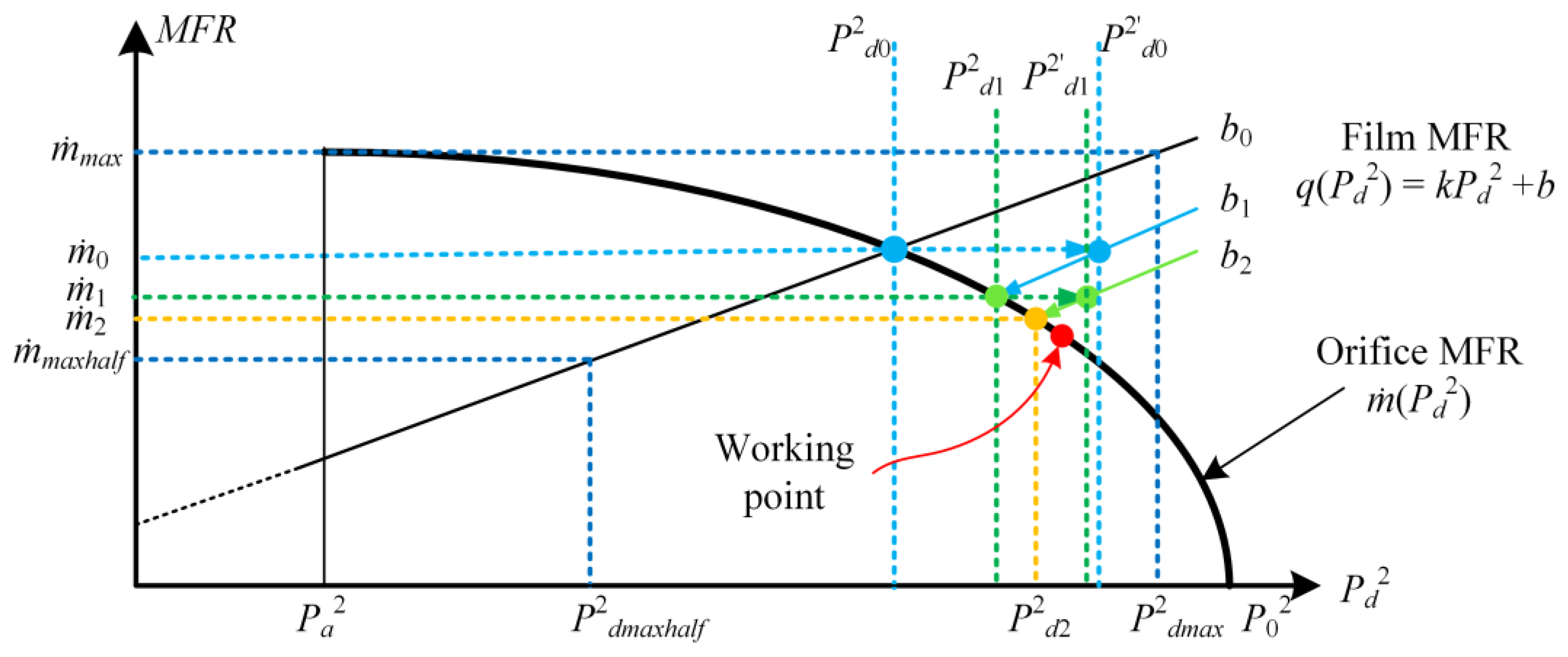
- In the COMSOL calculation in step (2), the flow rate in the gas film area is obtained, and it is introduced into MATLAB to calculate the post-orifice pressure (Pao) of each orifice restrictor; then, the result is compared with the initially given pressure-equalizing groove pressure (Pop). If the difference between them does not satisfy the convergence condition, Pao is taken as a new Pop for a new round of iterations. When Pao and Pop meet the convergence conditions, the iterative process ends.
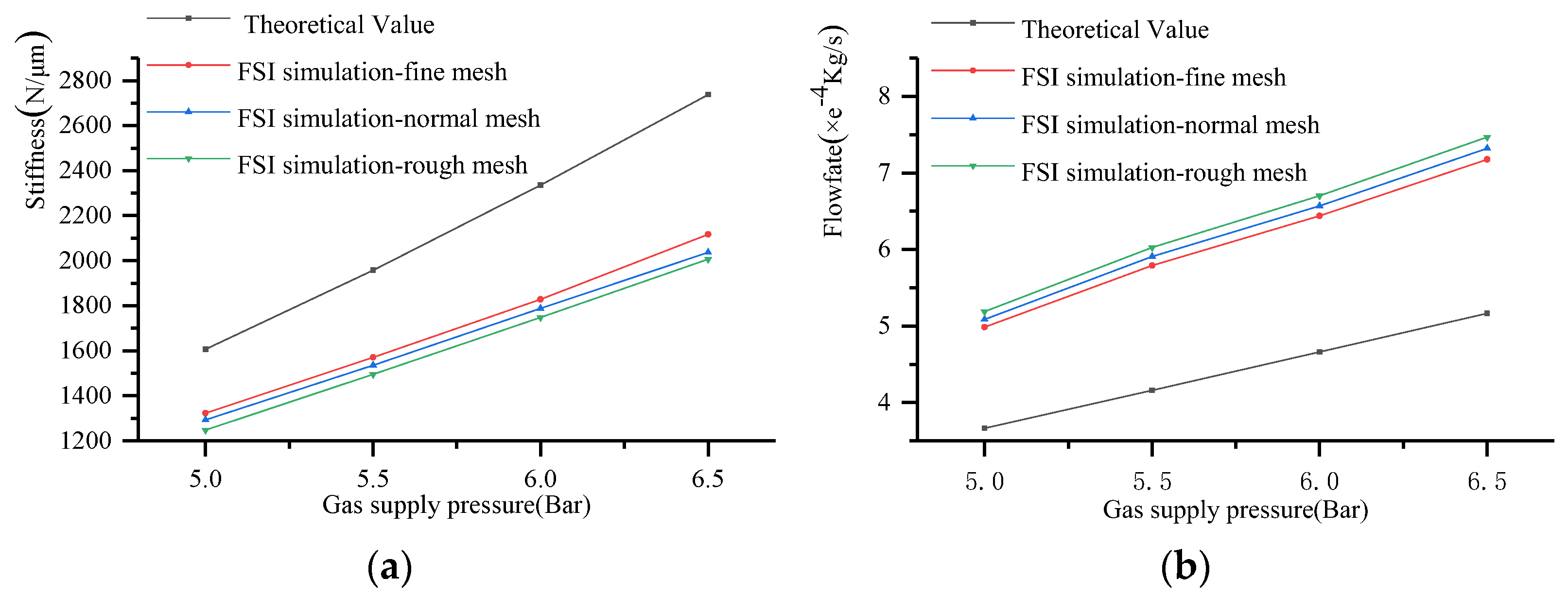
3. Simulation Results
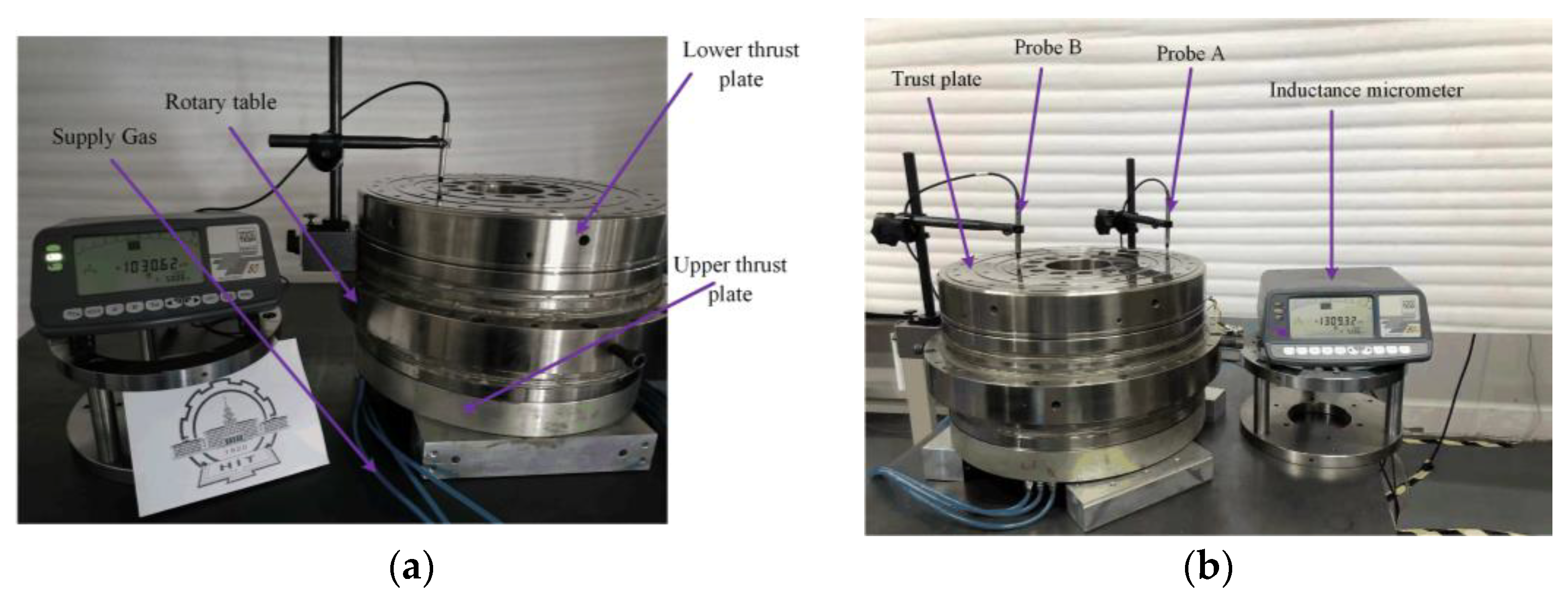
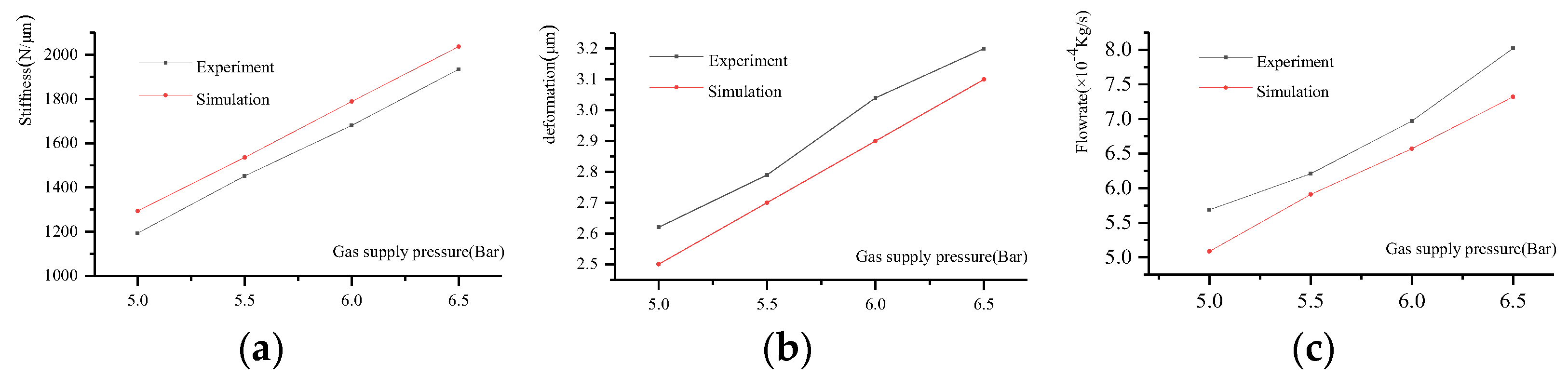
4. Experimental Validation
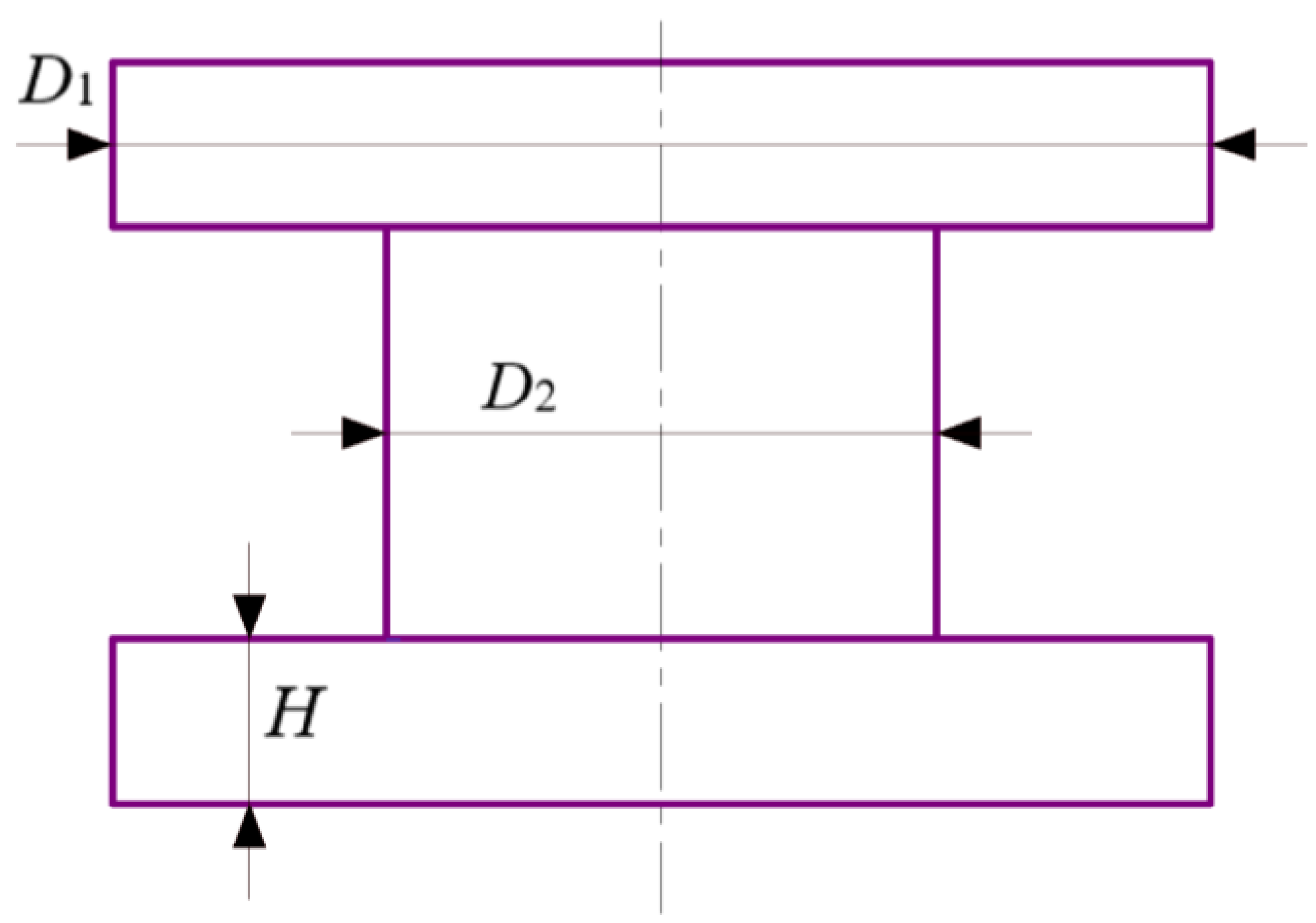
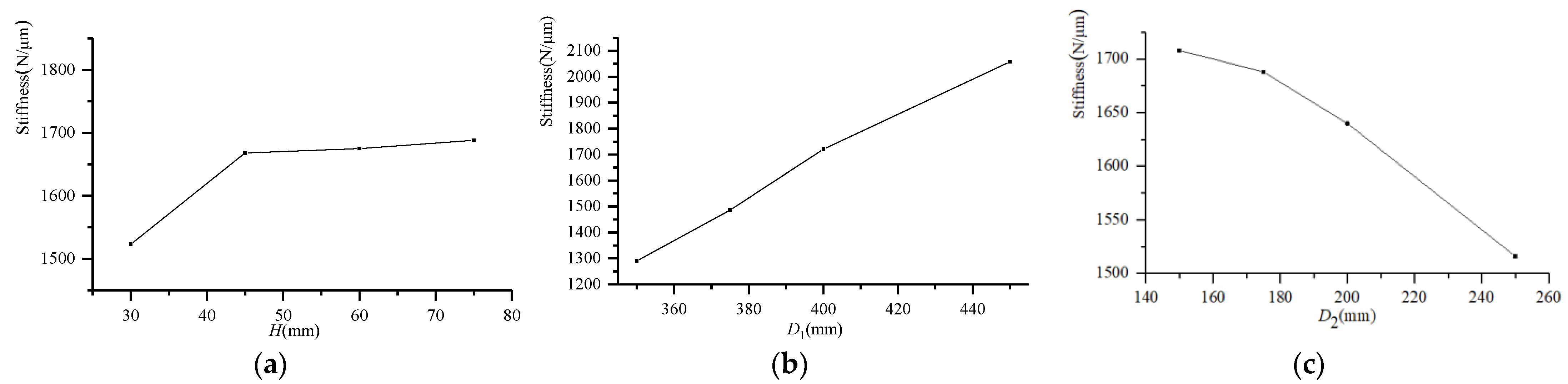
5. Structural Size Optimization Design
6. Conclusions
- The FSI model established in this work based on the DCM method can greatly improve the calculation accuracy of the aerostatic bearing’s performance. The model uses the finite element method to simultaneously calculate the solid field and the fluid field. Compared with the traditional theoretical model, the calculation error is greatly reduced, and at the same time, the method is less affected by the grid division, which greatly reduces the calculation speed. Therefore, compared with the separation approximation method, greater levels of accuracy and efficiency are achieved in the calculation.
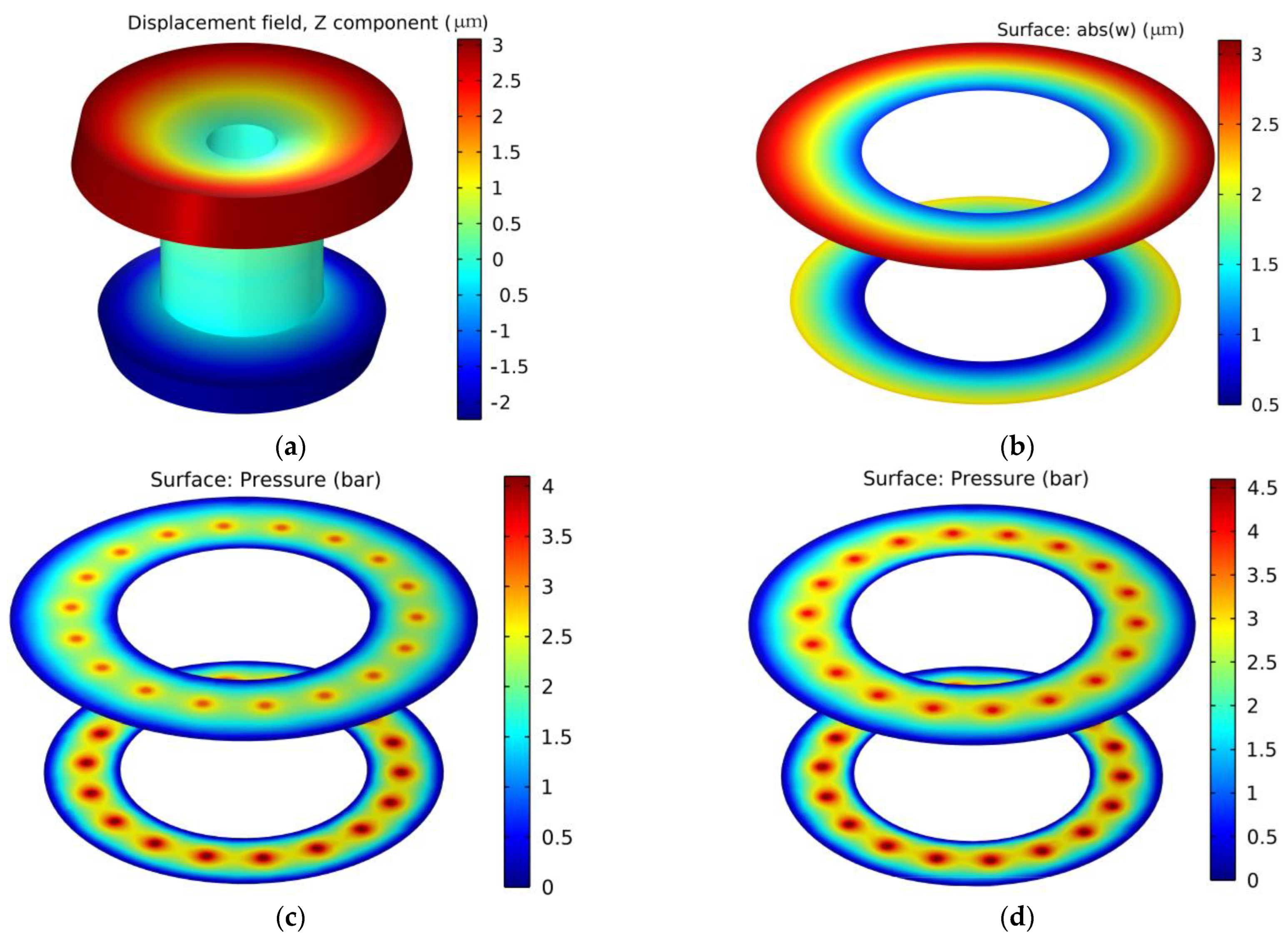
- To establish the FSI model of the I-shaped gas static pressure bearing, the DCM method is proposed in this paper, and how the FSI affects the performance of the thrust bearing under different supply pressures is analyzed based on COMSOL, including deformations in the thrust plate and the stiffness and flow rate of the thrust bearing. Experimental evidence confirms the theoretical analysis, and the results show that the FSI model calculates values that are closer to experimental measurements. Compared with simulation results without taking FSI into account, the variation trend of the stiffness of the thrust bearing in the simulation analysis considering the FSI effect is closer to the experimental results with supply pressure increases.
- Based on the FSI model, this paper further analyzes the influence of the critical structural dimensions of the I-shaped spindle in terms of the thrust bearing’s static performance. According to the results, the thrust plate’s thickness has the greatest influence on the thrust stiffness, and the aerostatic bearing design can be optimized on the basis of these results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Discrete Discretization of Partial Differential Governing Equations
References
- Chen, D.; Huo, C.; Cui, X.; Pan, R.; Fan, J.; An, C. Investigation the gas film in micro scale induced error on the performance of the aerostatic spindle in ultra-precision machining. Mech. Syst. Signal Process. 2018, 105, 488–501. [Google Scholar] [CrossRef]
- Zhang, S.; To, S.; Wang, H. A theoretical and experimental investigation into five-DOF dynamic characteristics of an aerostatic bearing spindle in ultra-precision diamond turning. Int. J. Mach. Tool. Manufact. 2013, 71, 1–10. [Google Scholar] [CrossRef]
- Gao, Q.; Chen, W.; Lu, L.; Huo, D.; Cheng, K. Aerostatic bearings design and analysis with the application to precision engineering: State-of-the-art and future perspectives. Tribol. Int. 2019, 135, 1–17. [Google Scholar]
- Altintas, Y.; Verl, A.; Brecher, C.; Uriarte, L.; Pritschow, G. Machine Tool Feed Drives. CIRP Ann. 2011, 60, 779–796. [Google Scholar] [CrossRef]
- Liang, Y.; Chen, W.; Bai, Q.; Sun, Y.; Chen, G.; Zhang, Q.; Sun, Y. Design and dynamic optimization of an ultraprecision diamond flycutting machine tool for large KDP crystal machining. Int. J. Adv. Manuf. Technol. 2013, 69, 237–244. [Google Scholar] [CrossRef]
- Lu, L.; Zhao, Z.; Liang, Y.; Zhang, L. Calculation and Analysis for Stiffness of the Thrust Aerostatic Bearing of Ultra-precision Machine Tools. In Proceedings of the International Symposium on Advanced Optical Manufacturing and Testing Technologies: Advanced Optical Manufacturing Technologies, Dalian, China, 26–29 April 2010; Volume 765507, pp. 01–05. [Google Scholar]
- van Beek, A.; van Ostayen, R.; Munnig Schmidt, R. An investiga tion to the effect of elastic deforma tions of the bearing surface of ep air bearings. In Proceedings of the International Joint Tribology Conference, Miami, FL, USA, 20–22 October 2008. [Google Scholar]
- Pandey, N.P.; Tiwari, A. CFD Simulation of Air Bearing Material. Int. J. Sci. Res. Dev. 2010, 3, 126–129. [Google Scholar]
- Lu, L.; Chen, W.; Yu, N.; Wang, Z. Aerostatic thrust bearing performances analysis considering the fluid-structure coupling effect. Eng. Tribol. 2016, 1, 208–210. [Google Scholar]
- Dhande, D.Y.; Pande, D.W. A two-way FSI analysis of multiphase flow in hydrodynamic journal bearing with cavitation. Braz. Soc. Mech. Sci. Eng. 2017, 39, 3399–3412. [Google Scholar]
- Lu, L.; Gao, Q.; Chen, W.; Liu, L.; Wang, G. Investigation on the fluid–structure interaction effect of an aerostatic spindle and the influence of structural dimensions on its performance. Eng. Tribol. 2017, 231, 01–07. [Google Scholar] [CrossRef]
- Lu, L.; Gao, Q.; Chen, W.; Wang, G. Multi-physics coupling analysis of an aerostatic spindle. Adv. Mech. Eng. 2017, 9, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Sun, Y.; He, Q.; Feng, J. Elastohydrodynamic Behavior Analysis of Journal Bearing Using Fluid–Structure Interaction Considering Cavitation. Arab. J. Sci. Eng. 2019, 44, 1305–1320. [Google Scholar] [CrossRef]
- Yan, R.; Wang, L.; Wang, S. Mechanical research on aerostatic guideways in consideration of fluid-structure interaction. Ind. Lubr. Tribol. 2020, 72, 285–290. [Google Scholar] [CrossRef]
- Wang, B.; Sun, Y.; Ding, Q. Free Fluid-Structure Interaction Method for Accurate Nonlinear Dynamic Characteristics of the Plain Gas Journal Bearings. Vib. Eng. Technol. 2020, 8, 149–161. [Google Scholar] [CrossRef]
- Wang, W.; Cheng, X.; Zhang, M.; Gong, W.; Cui, H. Effect of the deformation of porous materials on the performance of aerostatic bearings by fluid-solid interaction method. Tribol. Int. 2020, 150, 106391. [Google Scholar] [CrossRef]
- Gao, Q.; Gao, S.; Lu, L.; Zhu, M.; Zhang, F. A Two-Round Optimization Design Method for Aerostatic Spindles Considering the Fluid–Structure Interaction Effect. Appl. Sci. 2021, 11, 3017. [Google Scholar] [CrossRef]
- Gao, Q.; Lu, L.; Chen, W.; Wang, G. The influence of oil source pressure fluctuation on the waviness error of potassium dihydrogen phosphate in ultra-precision machining. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2019, 233, 486–493. [Google Scholar] [CrossRef]
- Liu, H.; Xu, H.; Ellison, P.J.; Jin, Z. Application of Computational Fluid Dynamics and Fluid–Structure Interaction Method to the Lubrication Study of a Rotor–Bearing System. Tribol. Lett. 2010, 38, 325–336. [Google Scholar] [CrossRef]
- Michler, C.; Hulshoff, S.J.; van Brummelen, E.H.; de Borst, R. A monolithic approach to fluid–structure interaction. Comput. Fluids 2004, 33, 839–848. [Google Scholar] [CrossRef]
- Gao, Q.; Qi, L.; Gao, S.; Lu, L.; Song, L.; Zhang, F. A FEM based modeling method for analyzing the static performance of aerostatic thrust bearings considering the fluid-structure interaction. Tribol. Int. 2021, 156, 106849. [Google Scholar] [CrossRef]
- Afra, B.; Delouei, A.A.; Mostafavi, M.; Tarokh, A. Fluid-structure interaction for the flexible filament’s propulsion hanging in the free stream. J. Mol. Liq. 2021, 323, 114941. [Google Scholar] [CrossRef]
- Afra, B.; Karimnejad, S.; Delouei, A.A.; Tarokh, A. Flow control of two tandem cylinders by a highly flexible filament: Lattice spring IB-LBM. Ocean. Eng. 2022, 250, 111025. [Google Scholar] [CrossRef]
- Wu, Y.; Qiao, Z.; Xue, J.; Liu, Y.; Wang, B. Root iterative method for static performance analysis of aerostatic thrust bearings with multiple pocketed orifice-type restrictors based on ANSYS. Ind. Lubr. Tribol. 2019, 72, 165–171. [Google Scholar]
- Sato, Y.; Yan, J.W. Tool path generation and optimization for freeform surface diamond turning based on an independently controlled fast tool servo. Int. J. Extrem. Manuf. 2020, 4, 025102. [Google Scholar] [CrossRef]
- Liu, T.; Ge, W.P. Study of self-excited vibration for externally pressurized dic gas thrust bearing. In Proceedings of the Electromechanical Institute of China Space Science and Space Committee on Space Optics Conference, Lanzhou, China, 17–19 September 2008. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Levels/Factors | H (mm) | D1 (mm) | D2 (mm) |
|---|---|---|---|
| 1 | 30 | 350 | 150 |
| 2 | 45 | 375 | 175 |
| 3 | 60 | 400 | 200 |
| 4 | 75 | 450 | 250 |
| Simulation Number | H | D1 | D2 | K |
|---|---|---|---|---|
| 1 | 2 | 3 | ||
| 1 | 30 | 350 | 150 | 1126 |
| 2 | 30 | 375 | 175 | 1469 |
| 3 | 30 | 400 | 200 | 1713 |
| 4 | 30 | 450 | 250 | 1782 |
| 5 | 45 | 350 | 175 | 1422 |
| 6 | 45 | 375 | 150 | 1600 |
| 7 | 45 | 400 | 250 | 1602 |
| 8 | 45 | 450 | 200 | 2047 |
| 9 | 60 | 350 | 200 | 1319 |
| 10 | 60 | 375 | 250 | 1389 |
| 11 | 60 | 400 | 150 | 1850 |
| 12 | 60 | 450 | 175 | 2143 |
| 13 | 75 | 350 | 250 | 1291 |
| 14 | 75 | 375 | 200 | 1484 |
| 15 | 75 | 400 | 175 | 1717 |
| 16 | 75 | 450 | 150 | 2257 |
| K1 | 1523 | 1290 | 1708 | |
| K2 | 1668 | 1486 | 1688 | |
| K3 | 1675 | 1721 | 1640 | |
| K4 | 1688 | 2057 | 1516 | |
| R | 165 | 767 | 192 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Chen, W.; Zhang, Q.; Qiao, Z.; Wang, B. The Direct-Coupling Method for Analyzing the Performance of Aerostatic Bearings Considering the Fluid–Structure Interaction Effect. Lubricants 2023, 11, 148. https://doi.org/10.3390/lubricants11030148
Wu Y, Chen W, Zhang Q, Qiao Z, Wang B. The Direct-Coupling Method for Analyzing the Performance of Aerostatic Bearings Considering the Fluid–Structure Interaction Effect. Lubricants. 2023; 11(3):148. https://doi.org/10.3390/lubricants11030148
Chicago/Turabian StyleWu, Yangong, Wentao Chen, Qinghui Zhang, Zheng Qiao, and Bo Wang. 2023. "The Direct-Coupling Method for Analyzing the Performance of Aerostatic Bearings Considering the Fluid–Structure Interaction Effect" Lubricants 11, no. 3: 148. https://doi.org/10.3390/lubricants11030148