An Overview of Electric Machine Trends in Modern Electric Vehicles


Abstract
:1. Introduction
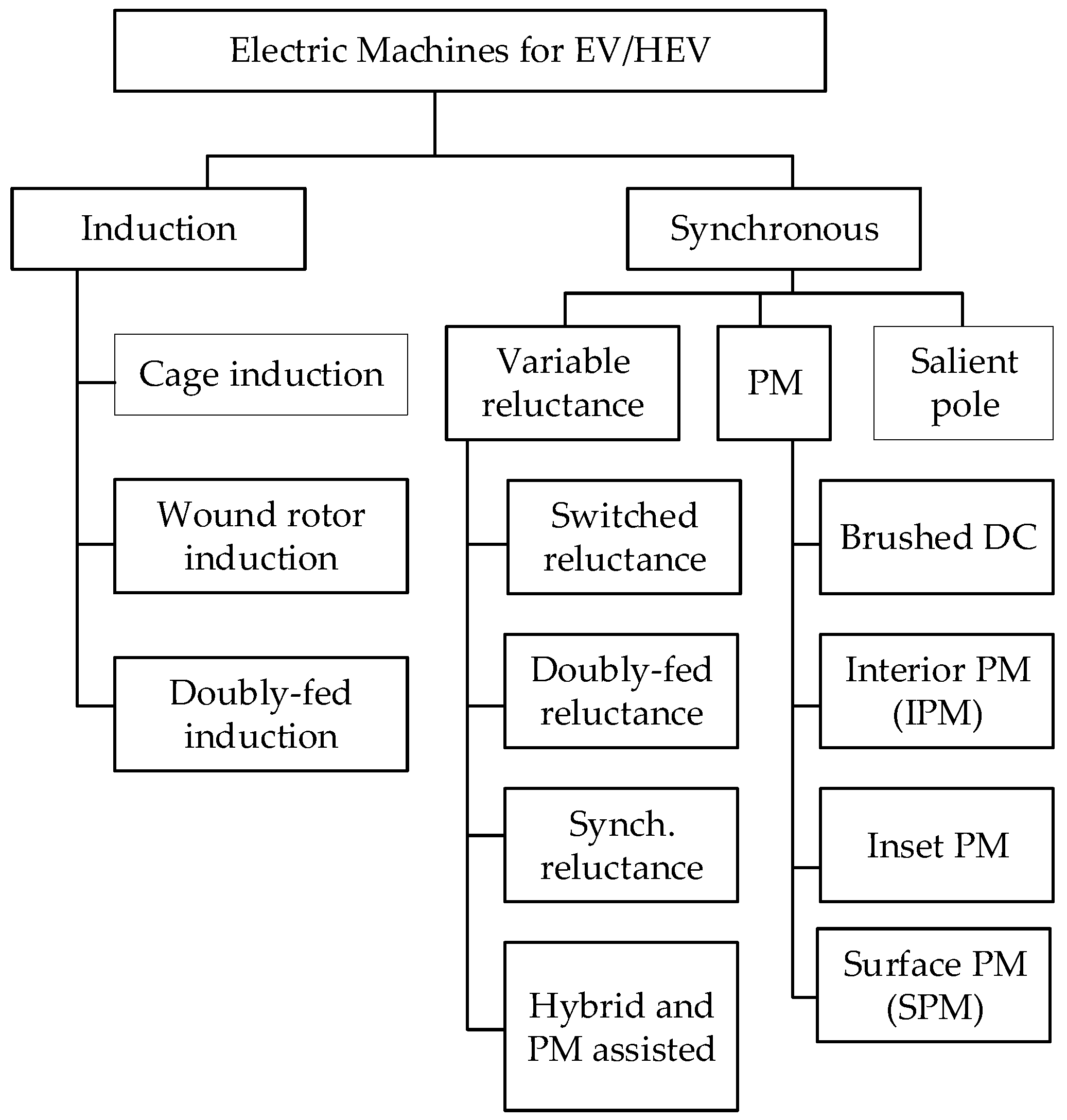
2. Basic Types of Electric Machines
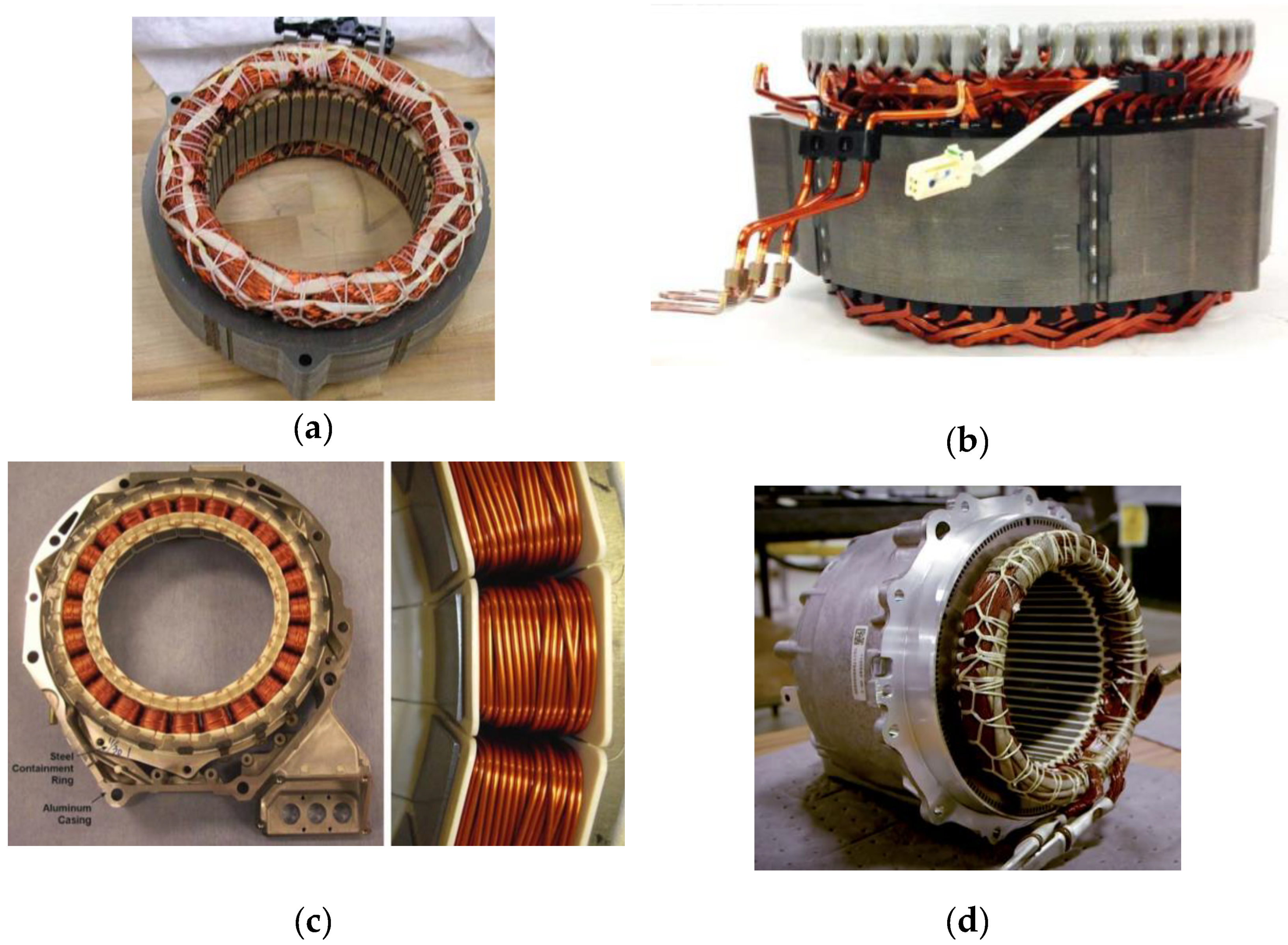
2.1. Induction Machines
2.2. Permanent Magnet Synchronous Machines
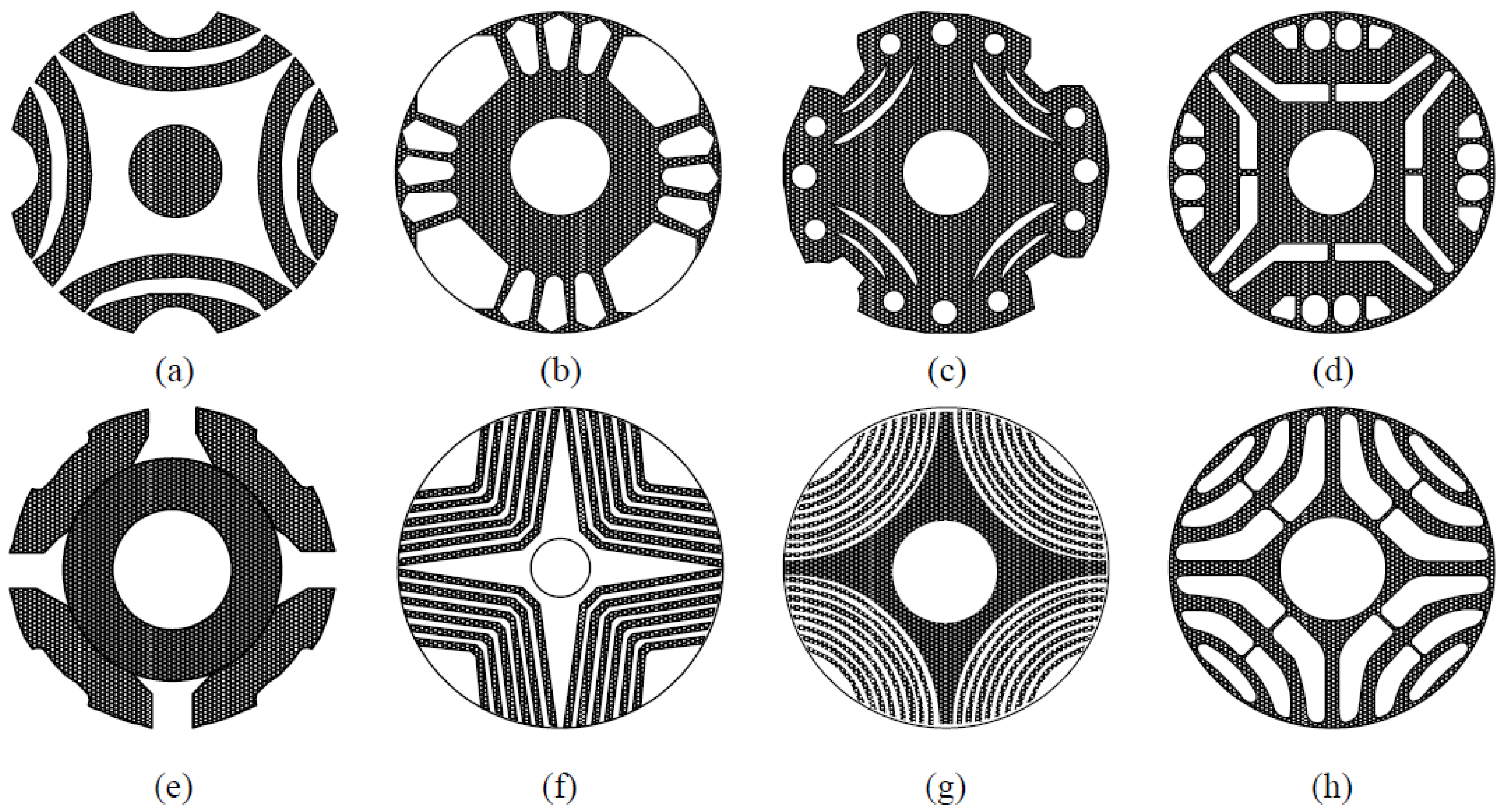
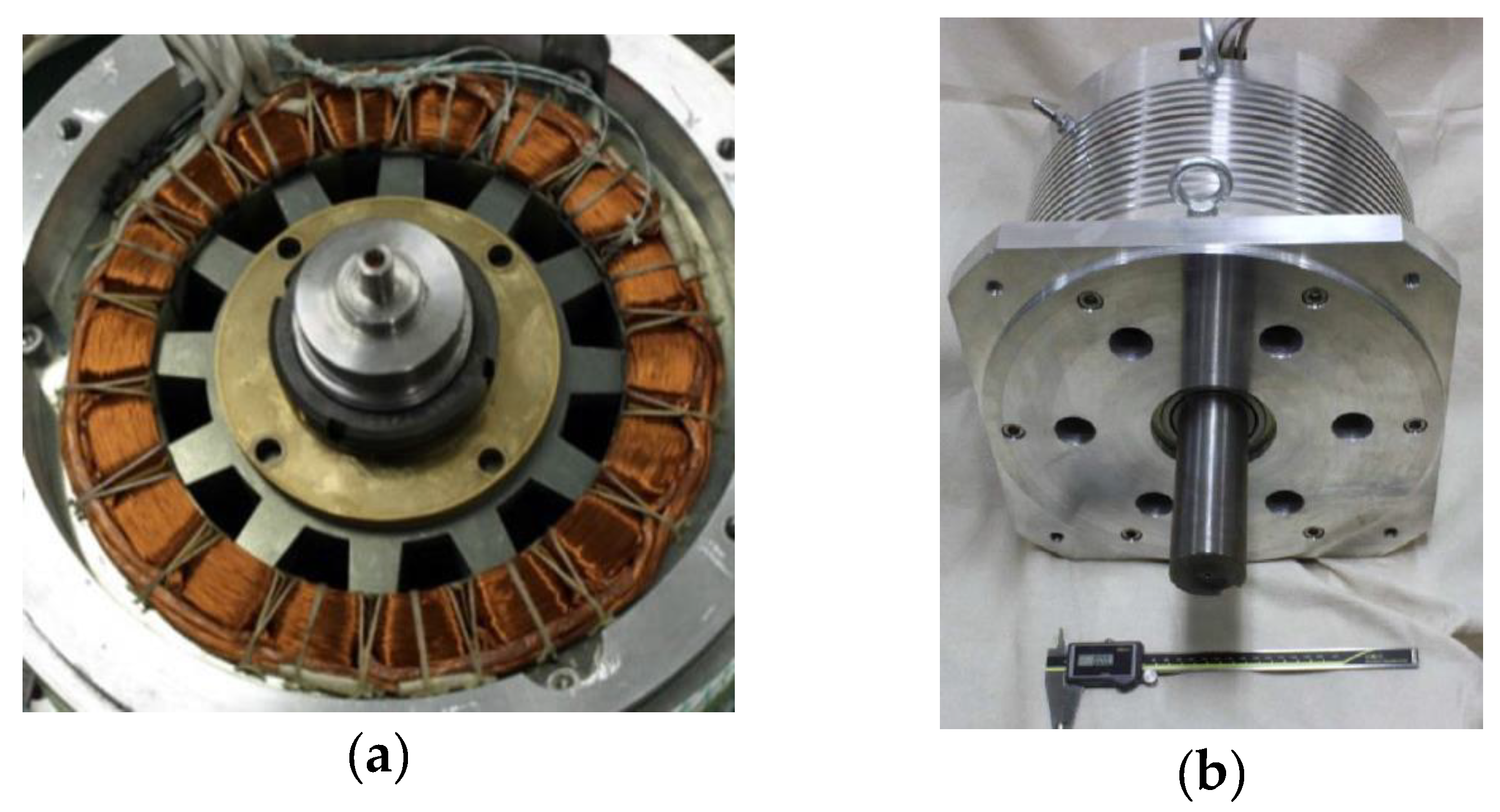
2.3. Reluctance Machines
3. Recent and Projected Trends in Electric Machines in Electric Vehicles
3.1. IPM Machines with Rare-Earth Magnets
3.2. Traction Machines without Rare-Earth Magnets
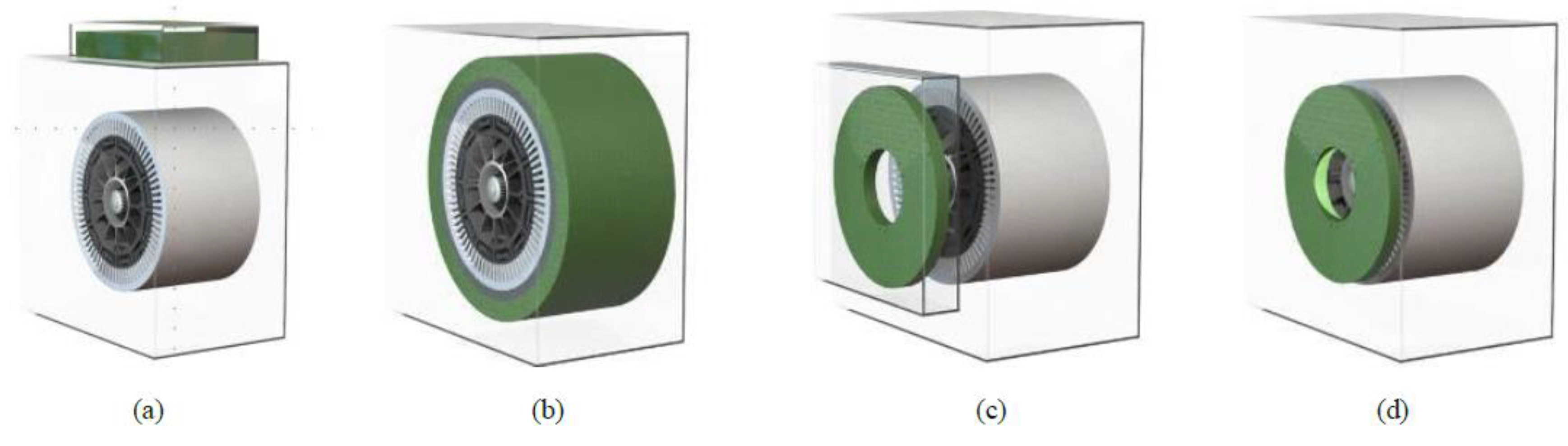
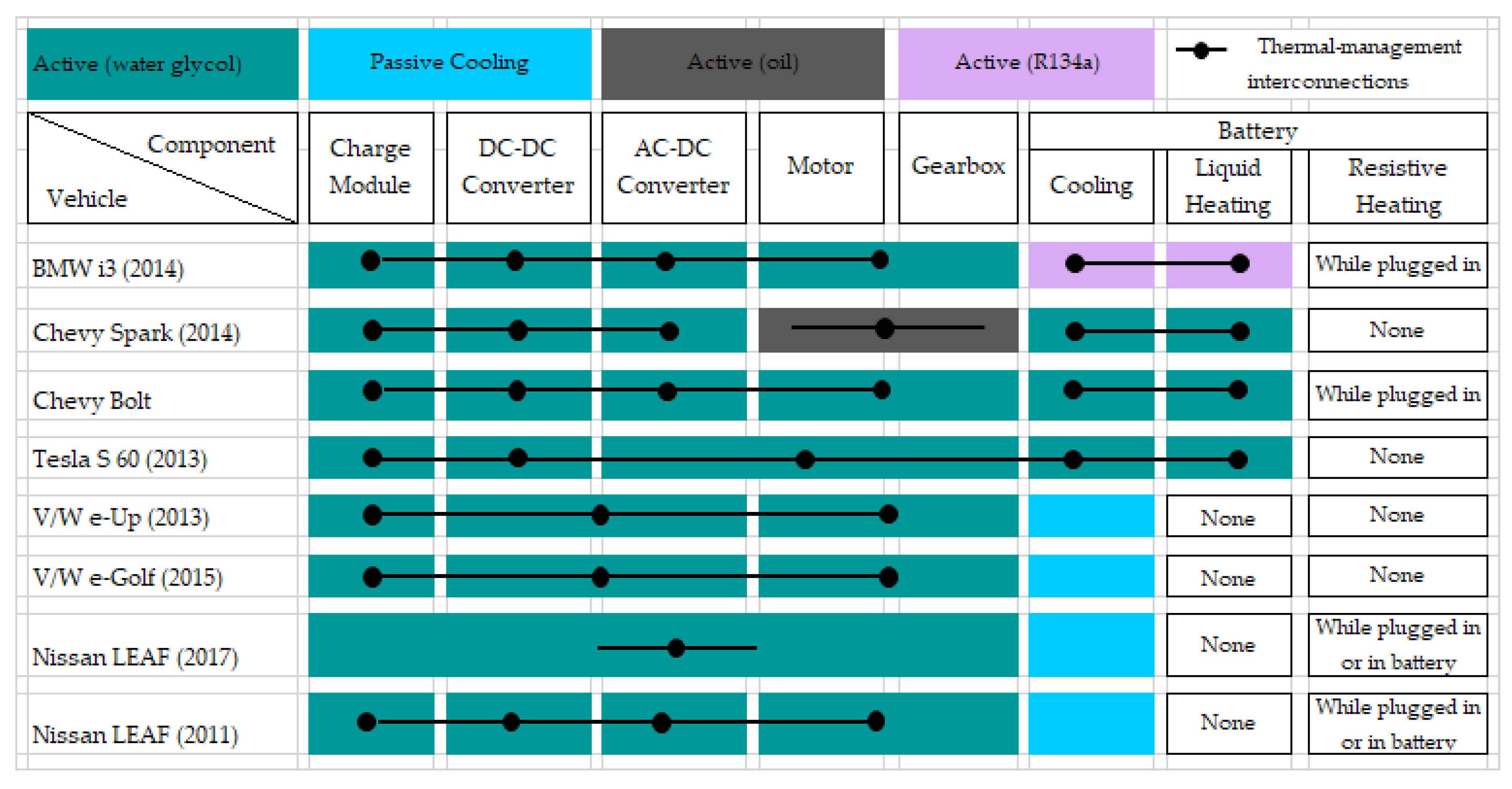
3.3. Machine Integration and Thermal Management Systems
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Husain, I. Electric and Hybrid Vehicles Design Fundamentals, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Palmquist, M. The Auto Industry’s Big Bailout Bounce—Strategy+Business. Available online: https://www.strategy-business.com/article/re00245?gko=21e83 (accessed on 9 February 2020).
- EEI, Electric Vehicle Sales Facts and Figures. Available online: https://www.eei.org/issuesandpolicy/electrictransportation/Documents/FINAL_EV_Sales_Update_April2019.pdf (accessed on 9 February 2020).
- Oak Ridge National Laboratory. Available online: https://www.ornl.gov/ (accessed on 9 February 2020).
- Miller, J.M. Oak Ridge National Laboratory Annual Progress Report for the Power Electronics and Electric Motors Program. 2013. Available online: https://info.ornl.gov/sites/publications/files/Pub46377.pdf (accessed on 9 February 2020).
- Ozpineci, B. Oak Ridge National Laboratory Annual Progress Report for the Power Electronics and Electric Motors Program. 2014. Available online: https://info.ornl.gov/sites/publications/files/Pub52422.pdf (accessed on 9 February 2020).
- Burress, T.A.; Campbell, S.L.; Coomer, C.L.; Ayers, C.W.; Wereszczak, A.A.; Cunningham, J.P.; Marlino, L.D.; Seiber, L.E.; Lin, H.T. Evaluation of The 2010 Toyota Prius Hybrid Synergy Drive System. Available online: https://info.ornl.gov/sites/publications/files/Pub26762.pdf (accessed on 9 February 2020).
- Burress, T. Electrical Performance, Reliability Analysis, and Characterization. Available online: https://www.energy.gov/sites/prod/files/2017/06/f34/edt087_burress_2017_o.pdf (accessed on 9 February 2020).
- Staunton, R.H.; Burress, T.A.; Marlino, L.D. Evaluation of 2005 Honda Accord Hybrid Electric Drive System. Available online: https://www.osti.gov/servlets/purl/891260 (accessed on 9 February 2020).
- Burress, T.A.; Campbell, S.L.; Coomer, C.; Ayers, C.W.; Wereszczak, A.A.; Cunningham, J.P.; Marlino, L.D.; Seiber, L.E.; Lin, H.-T. Evaluation of the 2010 Toyota Prius Hybrid Synergy Drive System. Available online: https://www.osti.gov/biblio/1007833-evaluation-toyota-prius-hybrid-synergy-drive-system (accessed on 9 February 2020).
- Burress, T. Benchmarking of Competitive Technologies. Available online: https://www.energy.gov/sites/prod/files/2014/03/f10/ape006_burress_2011_o.pdf (accessed on 9 February 2020).
- Tesla Model 3 Battery/Motor/Glued Magnets. Available online: https://www.electric-skateboard.builders/t/tesla-model-3-battery-motor-glued-magnets/78764 (accessed on 9 February 2020).
- Tesla Model 3 Powertrain Fun. From Carburetors To Carborundum. You’ve Come A Long Way, Baby! Available online: https://cleantechnica.com/2018/05/28/more-tesla-model-3-powertrain-fun-from-carburetors-to-carborundum-youve-come-a-long-way-baby/ (accessed on 9 February 2020).
- What Is inside a Tesla Engine? Available online: https://www.youtube.com/watch?v=wvLmBfwmA04 (accessed on 9 February 2020).
- Ingineerix. “First Look: Tesla Model 3 Drive Unit”. Available online: https://www.youtube.com/watch?v=m4eQ7nN_Lwo (accessed on 9 February 2020).
- Benchmarking Contents: Benchmarking Intelligence at Its Best. Available online: https://portal.a2mac1.com/benchmarking-database/URL (accessed on 17 February 2020).
- El-Refaie, A.M. Motors/generators for traction/propulsion applications: A review. IEEE Veh. Technol. Mag. 2013, 8, 90–99. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Electrical machines and drives for electric, hybrid, and fuel cell vehicles. Proc. IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef] [Green Version]
- Boldea, I.; Tutelea, L.N.; Parsa, L.; Dorrell, D.G. Automotive Electric Propulsion Systems With Reduced or No Permanent Magnets: An Overview. IEEE Trans. Ind. Electron. 2014, 61, 5696–5711. [Google Scholar] [CrossRef]
- Widmer, J.D.; Martin, R.; Kimiabeigi, M. Electric vehicle traction motors without rare earth magnets. Sustain. Mater. Technol. 2015, 3, 7–13. [Google Scholar] [CrossRef] [Green Version]
- Jahns, T.M. Getting Rare-Earth Magnets Out of EV Traction Machines: A review of the many approaches being pursued to minimize or eliminate rare-earth magnets from future EV drivetrains. IEEE Electrif. Mag. 2017, 5, 6–18. [Google Scholar] [CrossRef]
- Wang, A.; Jia, Y.; Soong, W.L. Comparison of Five Topologies for an Interior Permanent-Magnet Machine for a Hybrid Electric Vehicle. IEEE Trans. Magn. 2011, 47, 3606–3609. [Google Scholar] [CrossRef]
- Ibrahim, M.N.; Sergeant, P.; Rashad, E.M. Rotor design with and without permanent magnets and performance evaluation of synchronous reluctance motors. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–7. [Google Scholar]
- Lequesne, B. Electric Machines for Automotive Propulsion: History and Future, Keynote Presentation, IEEE ITEC-AP 2019, May 2019. Available online: www.emotorseng.com (accessed on 9 February 2020).
- Chowdhury, S.; Gurpinar, E.; Su, G.J.; Raminosoa, T.; Burress, T.A.; Ozpineci, B. Enabling Technologies for Compact Integrated Electric Drives for Automotive Traction Applications. In Proceedings of the 2019 IEEE ITEC, Detroit MI, USA, 19–21 June 2019. [Google Scholar]
- Ban, B.; Stipetić, S.; Klanac, M. Synchronous Reluctance Machines: Theory, Design and the Potential Use in Traction Applications. In Proceedings of the 2019 EDPE Conference, The High Tatras, Slovakia, 24–26 September 2019. [Google Scholar]
- Reddy, P.B.; El-Refaie, A.M.; Galioto, S.; Alexander, J.P. Design of Synchronous Reluctance Motor Utilizing Dual-Phase Material for Traction Applications. IEEE Trans. Ind. Appl. 2017, 53, 1948–1957. [Google Scholar] [CrossRef]
- Chiba, A.; Takano, Y.; Takeno, M.; Imakawa, T.; Hoshi, N.; Takemoto, M.; Ogasawara, S. Torque Density and Efficiency Improvements of a Switched Reluctance Motor Without Rare-Earth Material for Hybrid Vehicles. IEEE Trans. Ind. Appl. 2011, 47, 1240–1246. [Google Scholar] [CrossRef]
- Chiba, A.; Kiyota, K.; Hoshi, N.; Takemoto, M.; Ogasawara, S. Development of a Rare-Earth-Free SR Motor with High Torque Density for Hybrid Vehicles. IEEE Trans. Energy Convers. 2014, 30, 175–182. [Google Scholar] [CrossRef]
- Takeno, M.; Chiba, A.; Hoshi, N.; Ogasawara, S.; Takemoto, M.; Rahman, M.A. Test Results and Torque Improvement of the 50-kW Switched Reluctance Motor Designed for Hybrid Electric Vehicles. IEEE Trans. Ind. Appl. 2012, 48, 1327–1334. [Google Scholar] [CrossRef]
- El-Refaie, A.; Osama, M. High Specific Power Electrical Machines: A System Perspective. China Electrotech. Soc. Trans. Electr. Mach. Syst. 2019, 3, 88–93. [Google Scholar] [CrossRef]
- Dorrell, D.G. Are wound-rotor synchronous motors suitable for use in high efficiency torque-dense automotive drives? Proc. IEEE IECON 2012. [Google Scholar] [CrossRef]
- Rossi, C.; Casadei, D.; Pilati, A.; Marano, M. Wound Rotor Salient Pole Synchronous Machine Drive for Electric Traction. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006. [Google Scholar]
- Zhang, X.; Bowman, C.L.; Haran, K.S.; O’Connell, T.C. Large electric machines for aircraft electric propulsion. IET Electr. Power Appl. 2018, 12, 767–779. [Google Scholar] [CrossRef]
- Cowie, J.G.; Brender, D.T. Die-cast Copper Rotors for improved motor performance. In Proceedings of the 2003 IEEE Annual Pulp and Paper Industry Technical Conference, Charleston, SC, USA, 16–20 June 2003. [Google Scholar]
- Available online: https://commons.wikimedia.org/wiki/File:Tesla_Model_S_motor_cutout.jpg (accessed on 9 February 2020).
- Available online: http://www.favi.com/en/electric-mobility/ (accessed on 9 February 2020).
- Agamloh, E.; Cavagnino, A. High efficiency design of induction machines for industrial applications. In Proceedings of the IEEE Workshop on Electrical Machine Design, Control and Diagnosis, Paris, France, 11–12 March 2013. [Google Scholar]
- England, M.; Ponick, B. Automated design of hairpin windings as tabular winding diagrams. Elektrotech. Informationstech. 2019, 136, 159–167. [Google Scholar] [CrossRef]
- Kabir, M.A. High Performance Reluctance Motor Drives with Three-Phase Standard Inverter. Ph.D. Thesis, North Carolina State University, Raleigh, NC, USA, 2017. [Google Scholar]
- Grace, K.; Galioto, S.; Bodla, K.; El-Refaie, A.M. Design and Testing of a Carbon-Fiber-Wrapped Synchronous Reluctance Traction Motor. IEEE Trans. Ind. Appl. 2018, 54, 4207–4217. [Google Scholar] [CrossRef]
- Pellegrino, G.; Jahns, T.M.; Bianchi, N.; Soong, W.L.; Cupertino, F. The Rediscovery of Synchronous Reluctance and Ferrite Permanent Magnet Motors Tutorial Course Notes; Springer: Basel, Switzerland, 2016. [Google Scholar]
- Bianchi, N.; Fornasiero, E.; Ferrari, M.; Castiello, M. Experimental Comparison of PM-Assisted Synchronous Reluctance Motors. IEEE Trans. Ind. Appl. 2015, 52, 163–171. [Google Scholar] [CrossRef]
- Momen, F.; Rahman, K.; Son, Y.; Savagian, P. Electrical propulsion system design of Chevrolet Bolt battery electric vehicle. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Momen, F.; Rahman, K.M.; Son, Y.; Savagian, P. Electric Motor Design of General Motors’ Chevrolet Bolt Electric Vehicle. SAE Int. J. Altern. Powertrains 2016, 5, 286–293. [Google Scholar] [CrossRef]
- Jurkovic, S.; Rahman, K.M.; Savagian, P. Design, Optimization and Development of Electric Machine for Traction Application in GM Battery Electric Vehicle. In Proceedings of the IEEE Electric Machines and Drives Conference, Coeur d’Alene, ID, USA, 10–13 May 2015. [Google Scholar]
- Throne, D.; Martinez, F.; Marguire, R.; Arens, D. Integrated Motor/Drive Technology with Rockwell Connectivity. Available online: http://www.cmafh.com/enewsletter/PDFs/IntegratedMotorDrives.pdf (accessed on 3 April 2020).
- Abebe, R.; Calzo, G.L.; Vakil, G.; Mecrow, B.; Lambert, S.; Cox, T.; Gerada, C.; Johnson, M.; Cox, T. Integrated motor drives: State of the art and future trends. IET Electr. Power Appl. 2016, 10, 757–771. [Google Scholar] [CrossRef] [Green Version]
- The Quintek Group. 2016 Chevy Volt Voltech Propulsion Gen 2. Available online: https://www.youtube.com/watch?v=2yRS-AJ1VQU (accessed on 5 April 2020).
- Gai, Y.; Kimiabeigi, M.; Chong, Y.C.; Widmer, J.D.; Deng, X.; Popescu, M.; Goss, J.; Staton, D.; Steven, A.; Steven, A. Cooling of Automotive Traction Motors: Schemes, Examples, and Computation Methods. IEEE Trans. Ind. Electron. 2018, 66, 1681–1692. [Google Scholar] [CrossRef]
- Enriquez, M.; Morel, T.; Mouliere, P.-Y.; Schafer, P. Trends in Electric-Vehicle Design. McKinsey and Company. 2017. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/trends-in-electric-vehicle-design (accessed on 3 April 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Year | Motor Type | Peak Power kWp | Peak Torque N.m | Max Speed RPM | Poles | Peak Specific Power kW/kg | Peak Power Density kW/L |
|---|---|---|---|---|---|---|---|---|
| Roadster | 2008 | IM | 215 | 370 | 14,000 | 4 | 4.05 | - |
| Tesla S60 | 2013 | IM | 225 | 430 | 14,800 | 4 | - | - |
| Model 3 | 2017 | PM | 192 | 410 | 18,000 | 6 | - | - |
| Prius | 2004 | PM | 50 | 400 | 6000 | 8 | 1.1 | 3 |
| Prius | 2010 | PM | 60 | 207 | 13,500 | 8 | 1.6 | 4.8 |
| Prius | 2017 | PM | 53 | 163 | 17,000 | 8 | 1.7 | 3.35 |
| Accord | 2006 | PM | 12 | 136 | 6000 | 16 | 0.53 | 2.83 |
| Accord | 2014 | PM | 124 | - | 14,000 | 8 | 2.9 | 2.93 |
| Spark | 2014 | PM | 105 | 540 | 4500 | 12 | - | - |
| Volt | 2016 | PM | 111 | 370 | 12,000 | 12 | - | - |
| Bolt | 2017 | PM | 150 | 360 | 8810 | 8 | - | - |
| Leaf | 2012 | PM | 80 | 280 | 10,390 | 8 | 1.4 | 4.2 |
| Leaf | 2017 | PM | 80 | 280 | 10,390 | 8 | 1.4 | 4.2 |
| Camry | 2007 | PM | 70 | 270 | 14,000 | 8 | 1.7 | 5.9 |
| Camry | 2013 | PM | 70 | 270 | 14,000 | 8 | 1.7 | 5.9 |
| Lexus | 2008 | PM | 110 | 300 | 10,230 | 8 | 2.5 | 6.6 |
| Sonata | 2011 | PM | 30 | 205 | 6000 | 16 | 1.1 | 3.0 |
| BMW i3 | 2016 | PM | 125 | 250 | 11,400 | 12 | 3 | 9.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agamloh, E.; von Jouanne, A.; Yokochi, A. An Overview of Electric Machine Trends in Modern Electric Vehicles. Machines 2020, 8, 20. https://doi.org/10.3390/machines8020020
Agamloh E, von Jouanne A, Yokochi A. An Overview of Electric Machine Trends in Modern Electric Vehicles. Machines. 2020; 8(2):20. https://doi.org/10.3390/machines8020020
Chicago/Turabian StyleAgamloh, Emmanuel, Annette von Jouanne, and Alexandre Yokochi. 2020. "An Overview of Electric Machine Trends in Modern Electric Vehicles" Machines 8, no. 2: 20. https://doi.org/10.3390/machines8020020