4. Concentrated Winding and Design Rules
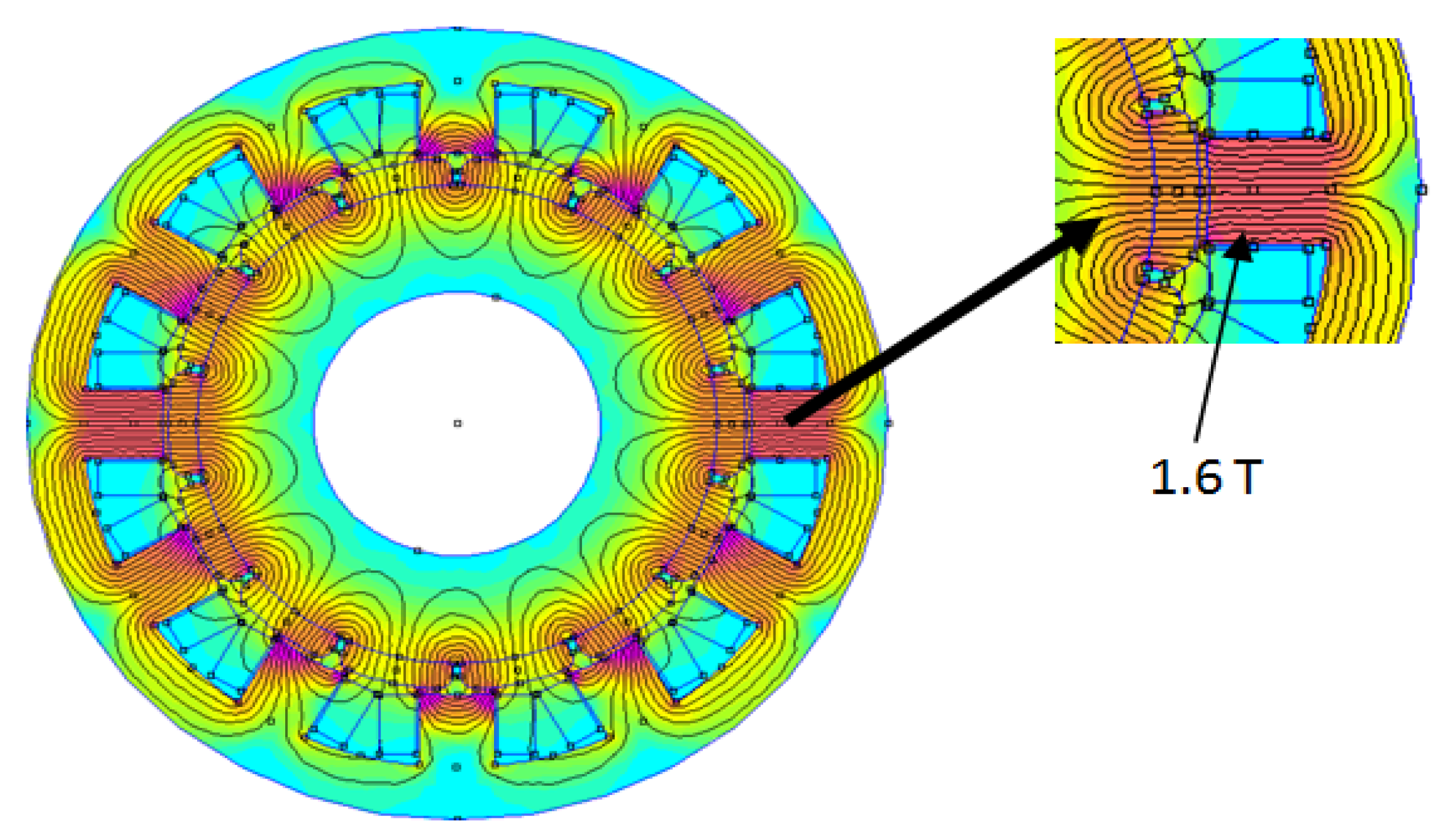
Although the methods used to determine the concentrated winding structure are well-known and fully documented all the designed structures are not machines that have been manufactured and tested. Staying in touch with manufacturers and their design engineers highlights some traps that should be avoided. This will initiate new design rules or can improve the current rules. They will be followed in the future. Looking at the number of poles and slots, it appears that numbers that are close to each other are preferable. For example, for a three-phase machine, having 14 poles and 12 slots, has better performances than a five-phase machine having 14 poles and 20 slots. This result is explained by the winding factor that is higher in the first case. First, making simulations, then observing the analysis of the magnetic flux flow, such an issue can be found and will also be demonstrated in the next paragraph. Two structures are examined, thereafter. The first one uses 14 poles and 12 slots and is presented in
Figure 2. The second one also uses 14 poles but has 20 slots. It is shown in
Figure 3. In the first figure, at a no-load case, the magnetic induction does not exceed 1.6 T, and in the second figure, the magnetic induction is above 1.8 T. A change in air-gap thickness does not modify anything in the flux distribution; the mechanical air-gap lacks enough influence on this one.
Figure 2.
The magnetic flux distribution in a concentrated winding structure with 14 poles and 12 slots. At no-load case, the highest level of magnetic induction is in the teeth.
Figure 2.
The magnetic flux distribution in a concentrated winding structure with 14 poles and 12 slots. At no-load case, the highest level of magnetic induction is in the teeth.
Figure 3.
Magnetic flux distribution in a concentrated winding structure having 14 poles and 20 slots (Five phases). At no-load case, the highest level of induction is in the teeth and is higher than the level of induction found in the 12 slots structure (
Figure 2).
q, the number of slots per pole and phase is 0.28 and is not equal to 1/5 (1/Nph). The number of poles has to increase.
Figure 3.
Magnetic flux distribution in a concentrated winding structure having 14 poles and 20 slots (Five phases). At no-load case, the highest level of induction is in the teeth and is higher than the level of induction found in the 12 slots structure (
Figure 2).
q, the number of slots per pole and phase is 0.28 and is not equal to 1/5 (1/Nph). The number of poles has to increase.
It is easy to understand that the high number of slots decreases the flux path section and implies a higher magnetic induction. This increases the iron losses in the teeth without any advantages. Skaar, Krøvel, and Nilssen have demonstrated that the best winding factor is obtained when
q (number of slot per pole and phase) is close to 1/Nph [
16]. This means
q = 1/3 with a three-phase supply. This leads to the number of slots Ns close to the number of pole (
q ≈ 1/3 ⇒ Ns ≈ Np ×3 × 1/3 ⇒ Ns ≈ Np). This can be summarized in a simple formulation, (Np +/− 2 = Ns), where Ns is the number of slots and Np is the number of poles [
17,
18]. Moreover, it is a good choice to prefer the number of slots be below the number of poles.
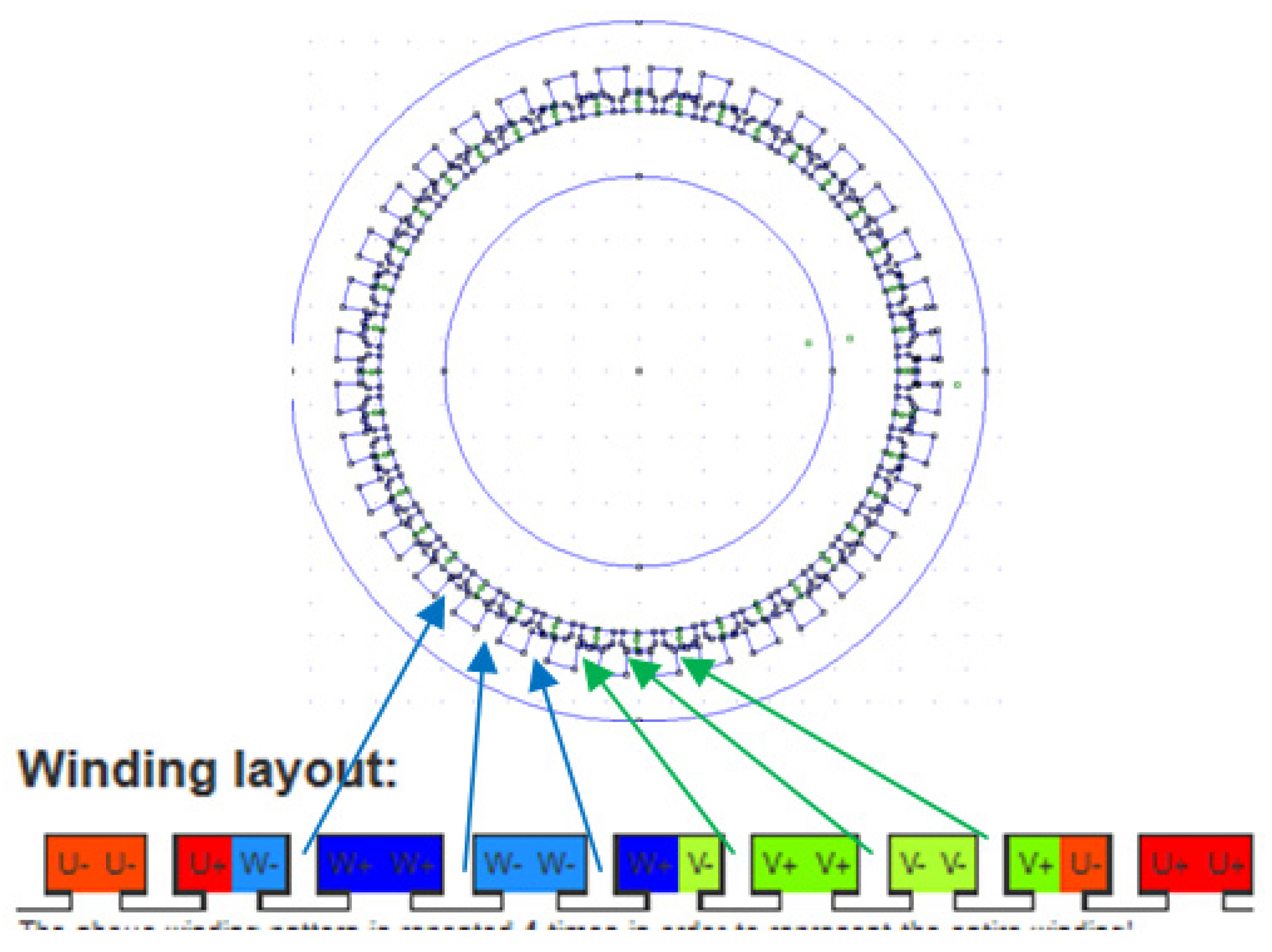
The selection of winding configurations that have a good winding factor is not enough to declare these structures “ready for use”. A drawback is presented thereafter: undesirable circulating currents can appear. With the following example the problem will be highlighted. A machine having 36 slots and 40 poles is examined. The number of slots is below the number of poles and the coils associated to the same phase are adjacent three-by-three (
Figure 4). Anyone can verify this solution by using the website at Reference [
19].
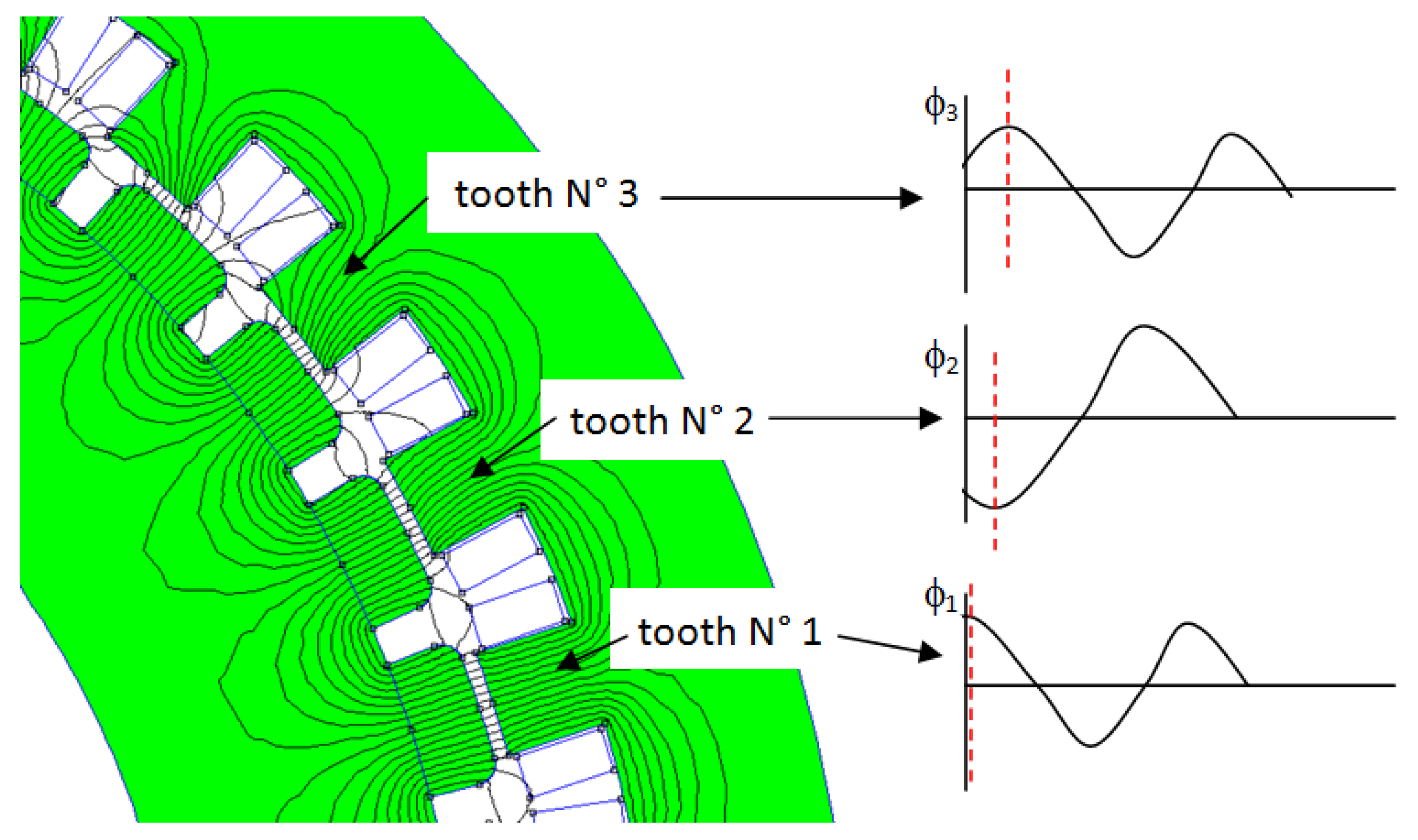
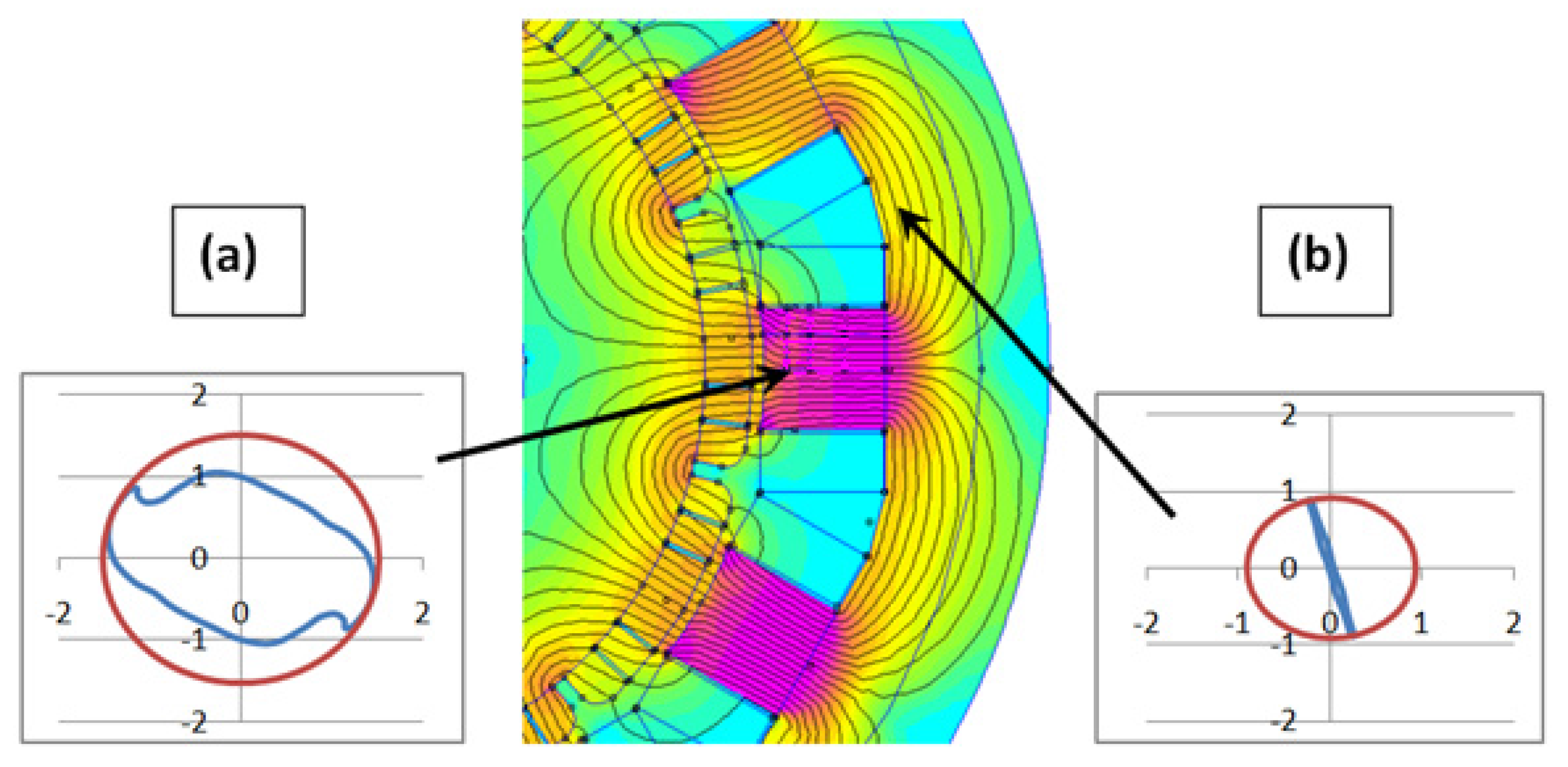
Looking at these three adjacent coils, it immediately appears that the magnetic flux induced by the permanent magnets does not have the same behavior in these three teeth. Although the magnitude of the magnetic flux in each tooth is similar, their shapes are not synchronized (
Figure 5). Therefore, it means that induced voltages in these three coils attached to these three teeth are not synchronous. Designers who want to connect these coils in parallel will have a nasty surprise. Circulating currents will appear between these coils and these currents will not be present in the power line, leaving engineers the idea that all is working fine (
Figure 6). Such circulating currents will increase the Joule losses and will also have a bad influence on the pulsating torque.
Figure 4.
The structure of a generator having 40 poles and 36 slots is established in combining four times the basic winding layout. In the basic winding layout, the coils attached to the same phase are gathered three by three.
Figure 4.
The structure of a generator having 40 poles and 36 slots is established in combining four times the basic winding layout. In the basic winding layout, the coils attached to the same phase are gathered three by three.
Figure 5.
Partial view of the structure having 40 poles 36 slots; in a group of three adjacent teeth, the magnetic flux cannot be the same at each time.
Figure 5.
Partial view of the structure having 40 poles 36 slots; in a group of three adjacent teeth, the magnetic flux cannot be the same at each time.
For another type of motor, this situation has already been studied. The connections of the coils in the permanent magnet brushless motors should be done with caution. In chapter six of his book, Hanselman has explained that many years ago, there was a lack of publications about the design of winding layouts [
20]. Therefore, he has given methods to achieve an acceptable winding layout. The same analysis has been done by Dai Prè, Alberti and Bianchi [
21,
22]. The issue can be solved if the coils are connected is series, but in our case the coils must be connected without any restriction. This means that this connection is not only a magnetic design issue but also a manufacturing problem. Most of the machines that have been studied or manufactured are low-power machines with low-voltage supply. The wires which are used are round wires insulated with enamel coating. When the power increases, such a solution could not be preserved [
23]. When the voltage is under 1000 V, manufacturers use random-wound stators. The strand is a round-wire that limits the power to several hundred KW. When machines operate over 1000 V, the form-wound stators-coil type is used. With this last technology, the coil is built outside the stator, which implies a stator with open slots and the strands are of a flat type. The insulation of these coils is more complicated. It uses several elements: strand insulation, turn insulation, and ground wall insulation. With such an insulation system, supply voltages of rotating machines can be higher than many thousands of volts. Unfortunately, handling coils build with flat-wires is not so convenient than handling small round wires. The connections of coils must also be examined, keeping in mind that FSCW have short ends windings. Coils in parallel are preferred to coils in series. For example, connecting four coils in parallel divides their assigned current by four; each coil only takes 1/4 of the current. The copper strands have a cross-section divided by four which is, in general adapted to the manufacturing capabilities. Moreover, the connections between coils and the circle, which must be done by hand, also use the same cross section. In allowing connections in series for coils, implies a more difficult soldering between coils due to the large cross-section and does not always suppress the circle. The volume of connections will increase and the advantage of the short end windings will disappear due to the volume of connections (
Figure 7). Moreover, in doing torque simulations for this situation, authors have noticed an increase in torque ripple when the coils are set in series. Setting coils in parallel also have a good influence on mitigation of unbalanced magnetic pull [
24], such a mechanical issue will be discussed later and it would not be a good idea to suppress this possibility of winding management.
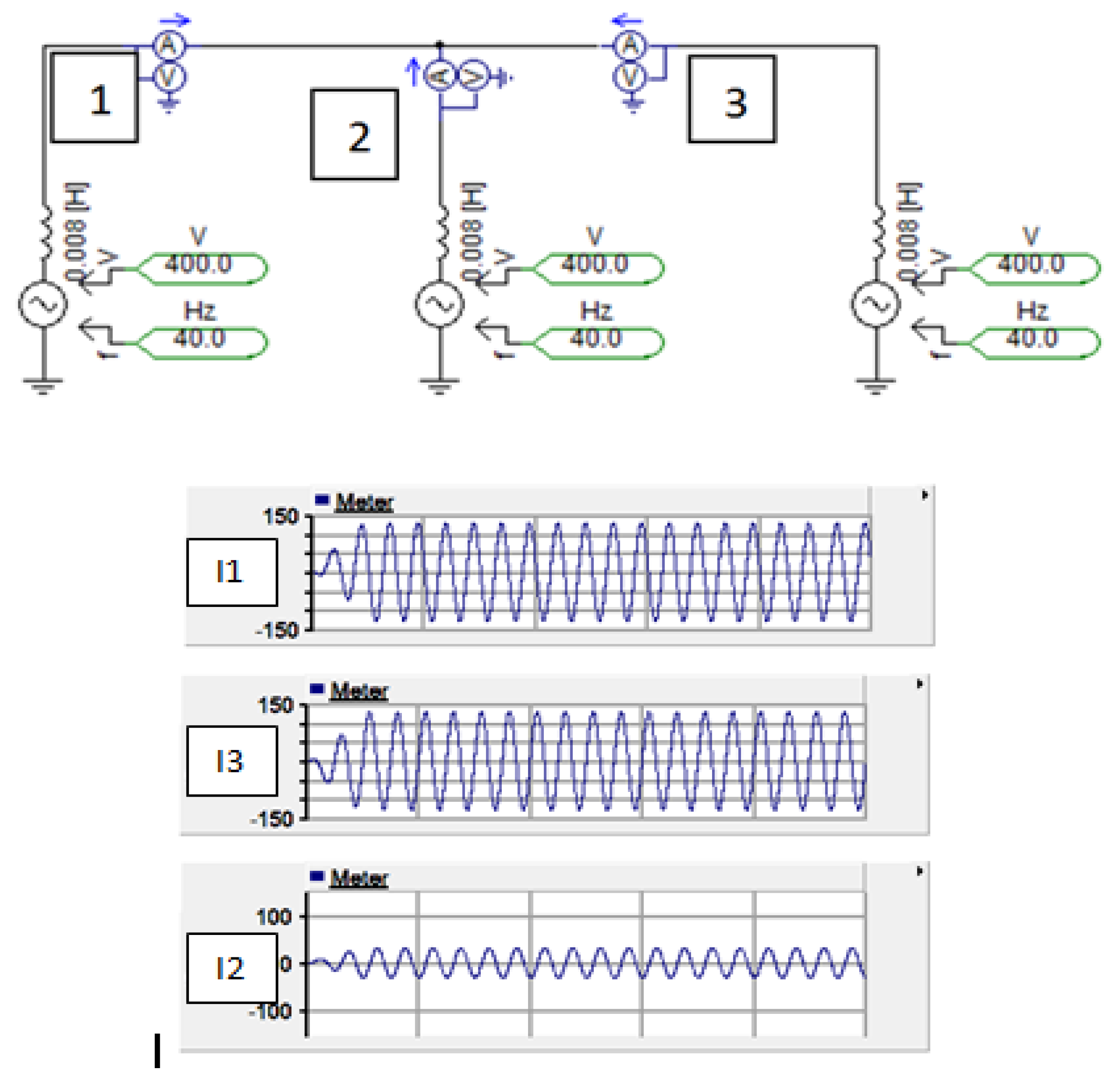
Figure 6.
At no load, the adjacent coils, which belong to the same phase, are connected in parallel. The induced FEM are not synchronous and circulating currents exist. In this example, three coils are connected (1, 2, and 3) and the circulating currents I1, I2, and I3 are plotted. They can be as high as 30% of the rated current and are not visible in power supply lines.
Figure 6.
At no load, the adjacent coils, which belong to the same phase, are connected in parallel. The induced FEM are not synchronous and circulating currents exist. In this example, three coils are connected (1, 2, and 3) and the circulating currents I1, I2, and I3 are plotted. They can be as high as 30% of the rated current and are not visible in power supply lines.
Figure 7.
Three coils (in blue) are connected in series. The connections (in white, A) show that they take some space in the area used to place circles (in red, B and in green, C). There are four circles, two more than in the figure, one for each phase and one for the neutral. In this figure the cross-sections are small in order to clearly show all of the items.
Figure 7.
Three coils (in blue) are connected in series. The connections (in white, A) show that they take some space in the area used to place circles (in red, B and in green, C). There are four circles, two more than in the figure, one for each phase and one for the neutral. In this figure the cross-sections are small in order to clearly show all of the items.
With this example (
Figure 4,
Figure 5 and
Figure 6), it appears that solutions, where the coils belonging to the same phase are adjacent and are set in parallel, are not acceptable solutions. Hence, designers must verify all of the induced voltages back EMF, for each coil, to avoid connections providing circulating currents. Doing so, some configurations are put away as they cannot be connected to a three-phase power supply without issue.
The geometrical properties of a winding have an important impact on the mechanical behavior. Designers have always paid attention to the force induced by the unbalanced magnetic pull [
24,
25]. This phenomenon occurs when the rotor is not well centered in the stator. The air-gap is different along the circumference. Subsequently, a magnetic force appears, it induces vibrations and can damage bearings. Unfortunately, this problem is more critical in FSCW [
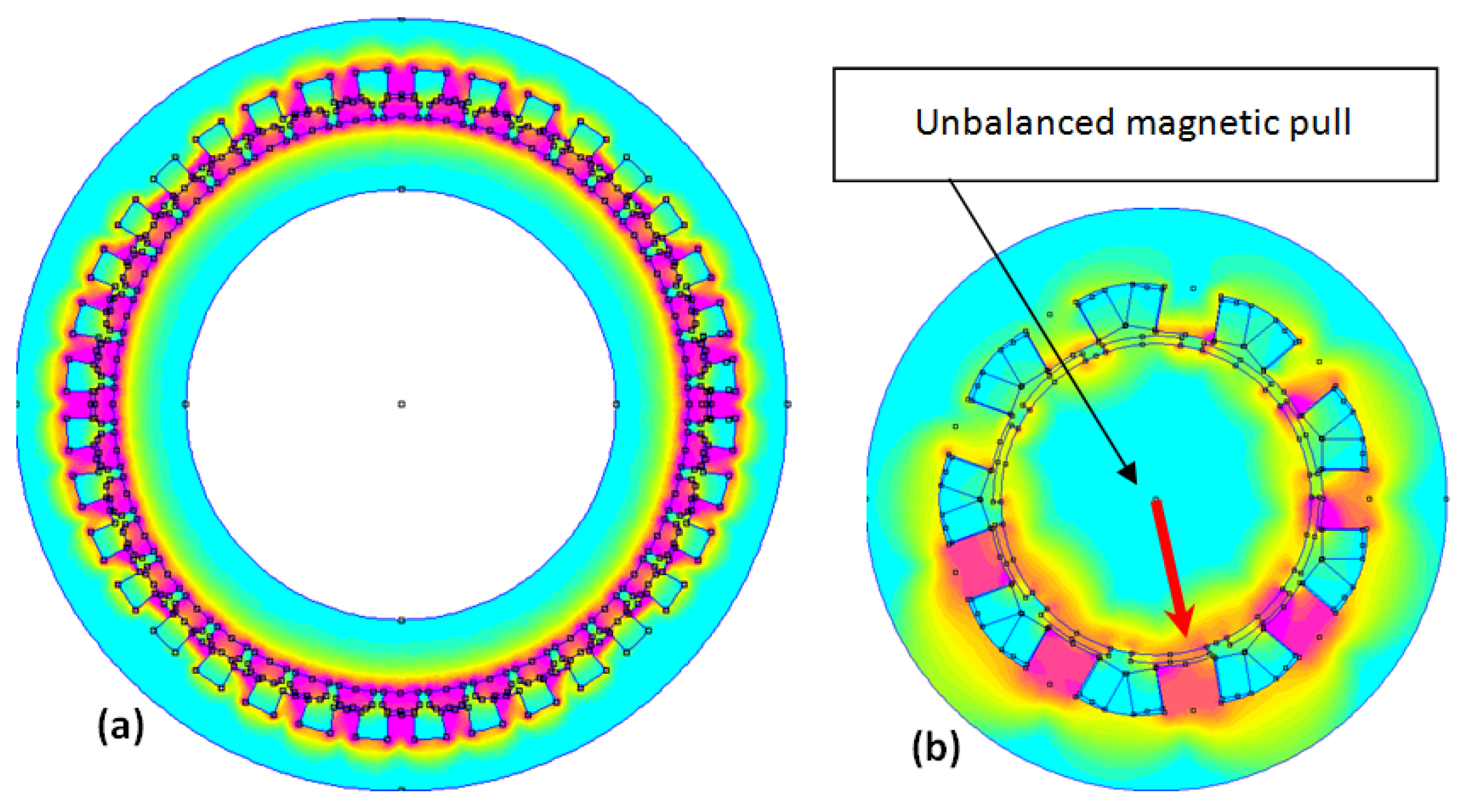
26]. Even if the rotor is centered in the stator, the winding geometry can affect the stability. Let us examine this with the same example, an electric generator having 36 slots and 40 poles. At no load, it appears that magnetic forces are balanced (
Figure 8a). This winding structure is coming from the basic structure having 10 poles and 9 slots, but this basic structure, 10 poles and 9 slots, is not mechanically balanced (
Figure 8b). This phenomenon has a particularity in FSCW as it can appear even if there is no geometrical deviation during manufacturing. Such a structure has situations that give unbalanced magnetic pull, which is not the case with distributed windings.
Such a problem can be solved if the winding structure is a duplication of another structure. With this rule, some acceptable structures will be put away. Designers have to verify the magnetic flux distribution at no load and its symmetry. With the structure having 14 poles and 12 slots, which is not a duplication of a smaller structure, the simulations show that flux distribution does not provide any unbalanced magnetic pull. In
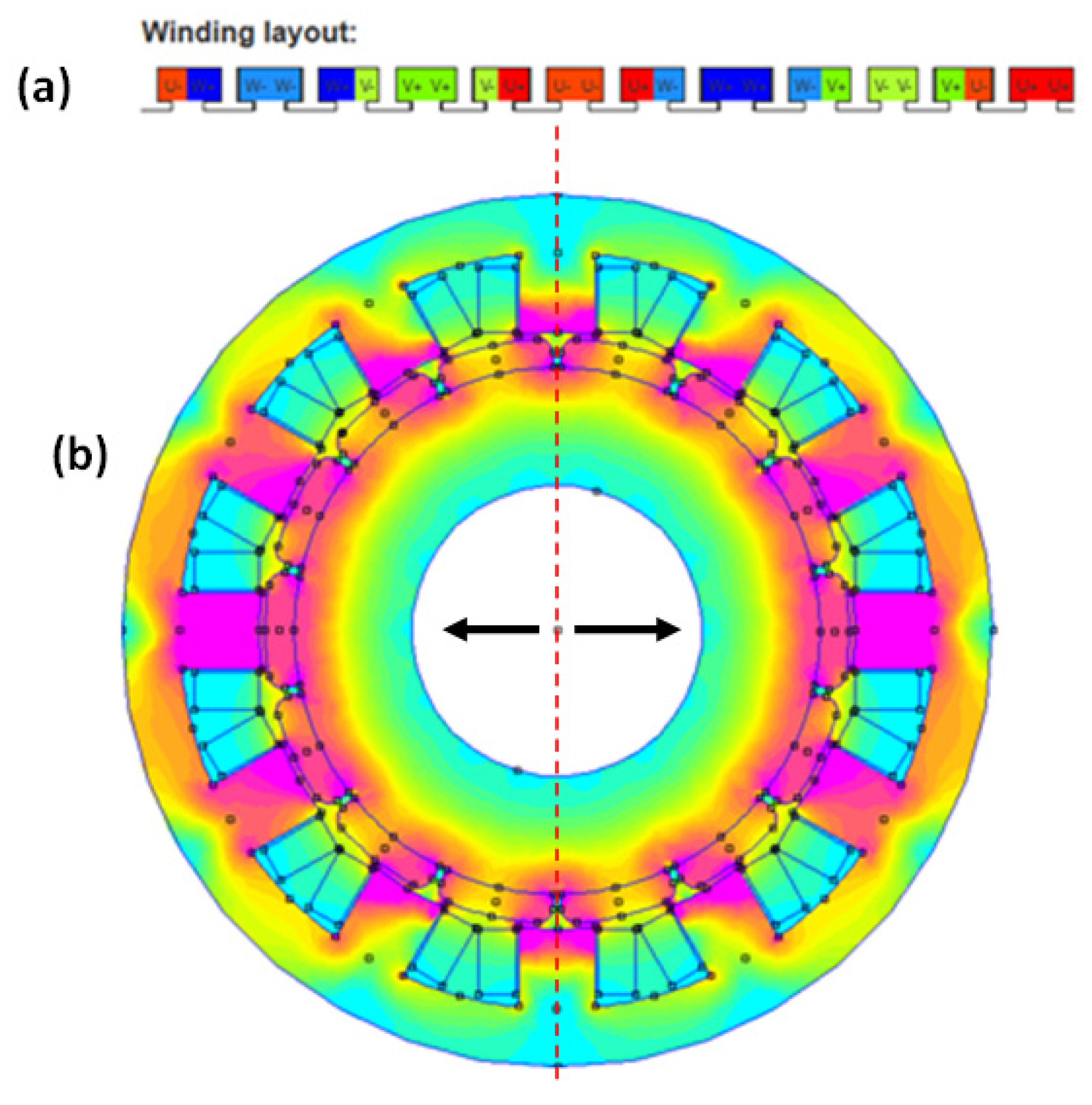
Figure 9a, the winding layout is described and there is no copy. In
Figure 9b, the magnetic flux distribution is shown and there is symmetry. Nevertheless, the structure with 14 poles and 12 slots is an interesting solution in term of magnetic flux distribution, but is not an acceptable solution as there are two coils of the same phase that are adjacent (see winding layout in
Figure 9a). With a three phase power supply and having coils in parallel, high circulating currents will appear between coils.
Figure 8.
On (a), the distribution of magnetic flux in a 36 slots 40 poles structure at no load. There is no unbalanced magnetic pull; On (b), the distribution of magnetic induction in a 9 slots 10 poles structure at no load. There is an unbalanced magnetic pull as there is no symmetry in the distribution.
Figure 8.
On (a), the distribution of magnetic flux in a 36 slots 40 poles structure at no load. There is no unbalanced magnetic pull; On (b), the distribution of magnetic induction in a 9 slots 10 poles structure at no load. There is an unbalanced magnetic pull as there is no symmetry in the distribution.
Figure 9.
In (a), the winding layout of a 12 slots 14 poles structure is presented; in (b), the magnetic flux distribution is shown. Due to the symmetry, there is a no unbalanced magnetic pull, but a possibility of circulating currents when winding layout is observed.
Figure 9.
In (a), the winding layout of a 12 slots 14 poles structure is presented; in (b), the magnetic flux distribution is shown. Due to the symmetry, there is a no unbalanced magnetic pull, but a possibility of circulating currents when winding layout is observed.
6. Concentrated Winding and Mutual Inductance
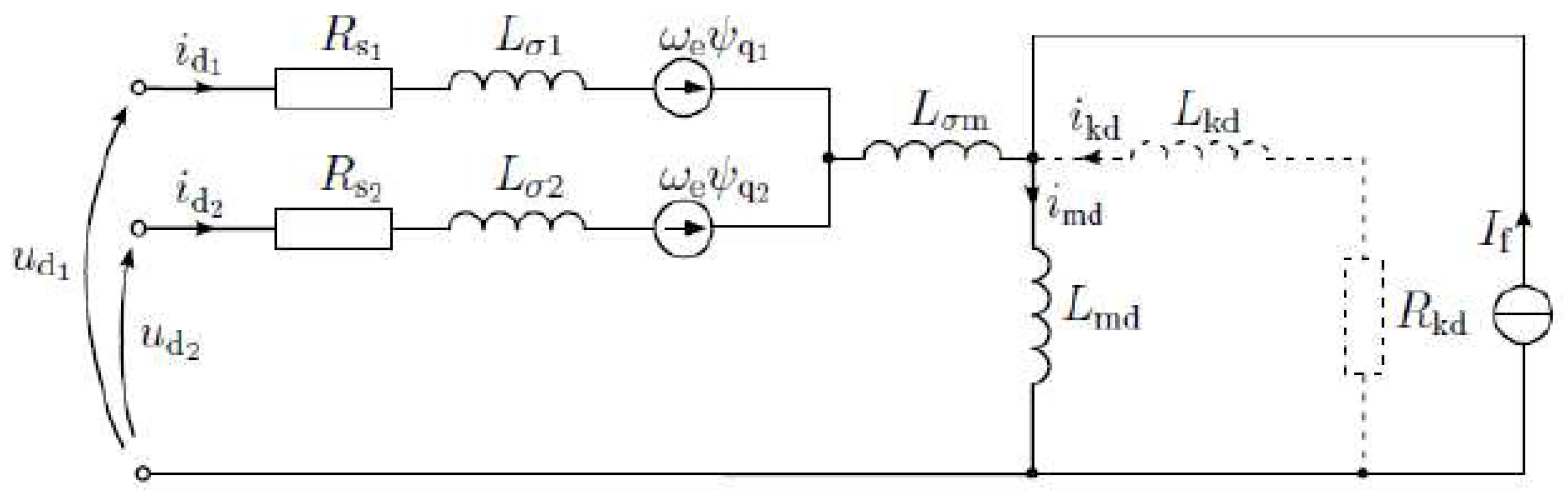
When a d-q model of a double-star winding is observed, it appears that stars are not magnetically decoupled. In
Figure 11, the most important parameters are: Lσ
m and Lσ
1 or Lσ
2 as it will be shown here after.
In the distributed winding, Lσ
m is not negligible in front of Lσ1 or Lσ2. It means that a current circulating in one star has an effect on the second star. This is especially verified when commutations of power switches occur. A commutation occurring in the first star generates a peak of current in the second star. Current ripples are thereafter observed. To reduce such a phenomenon, it is possible to increase Lσ1 or Lσ2 in adding inductors in the power line, as it has been suggested at the beginning of this section. In the distributed windings, it is usual to find that more than 30% of the magnetic flux of the first star is present in the second star. It implies a high value for Lσm and a low value for Lσ1 or Lσ2. Regarding FSCW, the situation is not similar [
29]. The effect of the current in one star can be neglected in the other star. Moreover, with a simple rule described in this previous reference, evaluation of mutual effects can be achieved.
Figure 11.
The equivalent model in d-q scheme of a double-star synchronous generator.
Figure 11.
The equivalent model in d-q scheme of a double-star synchronous generator.
Simulations and methods have been developed by Tessarolo to calculate the equivalent model associated to machines having multi-phase and multi-star windings [
6]. Using these methods for the designed structure (12 slots, 10 poles), it can be concluded that the mutual inductance between stars is low; the
Table 1 confirms this important point.
Table 1.
Numerical results obtained for a designed FSCW structure having 12 slots and 10 poles.
Table 1.
Numerical results obtained for a designed FSCW structure having 12 slots and 10 poles.
| Lσ1 | 0.23 mH |
| Lσ2 | 0.23 mH |
| Lσm | 0.006 mH |
As Lσm is very small in front of Lσ1 or Lσ2, the currents in the first star do not have any influence on the second star. Moreover, Lσ1 and Lσ2 have the greatest value allowed by the geometry of the machine. Any increase in Lσ1 or Lσ2 is only possible by inserting inductors in the supply power lines. Such a magnetic independence is not always found in other publications [
30]. Differences can be observed and also explained. When the slot is not fully open, which is not the case in our design the magnetic flux can use the slot depression as magnetic path. Hence, this leakage flux is the main origin of the mutual inductance between stars [
29]. Even if the increase of the slot opening is not recommended, as it causes additional losses in the rotor, this configuration is not prejudicial because some methods exist to mitigate magnet losses. Recent publications show that modeling of the multi-star machines is always in interest of the researchers [
31].
7. Concentrated Winding and Flux Circulation in the Stator
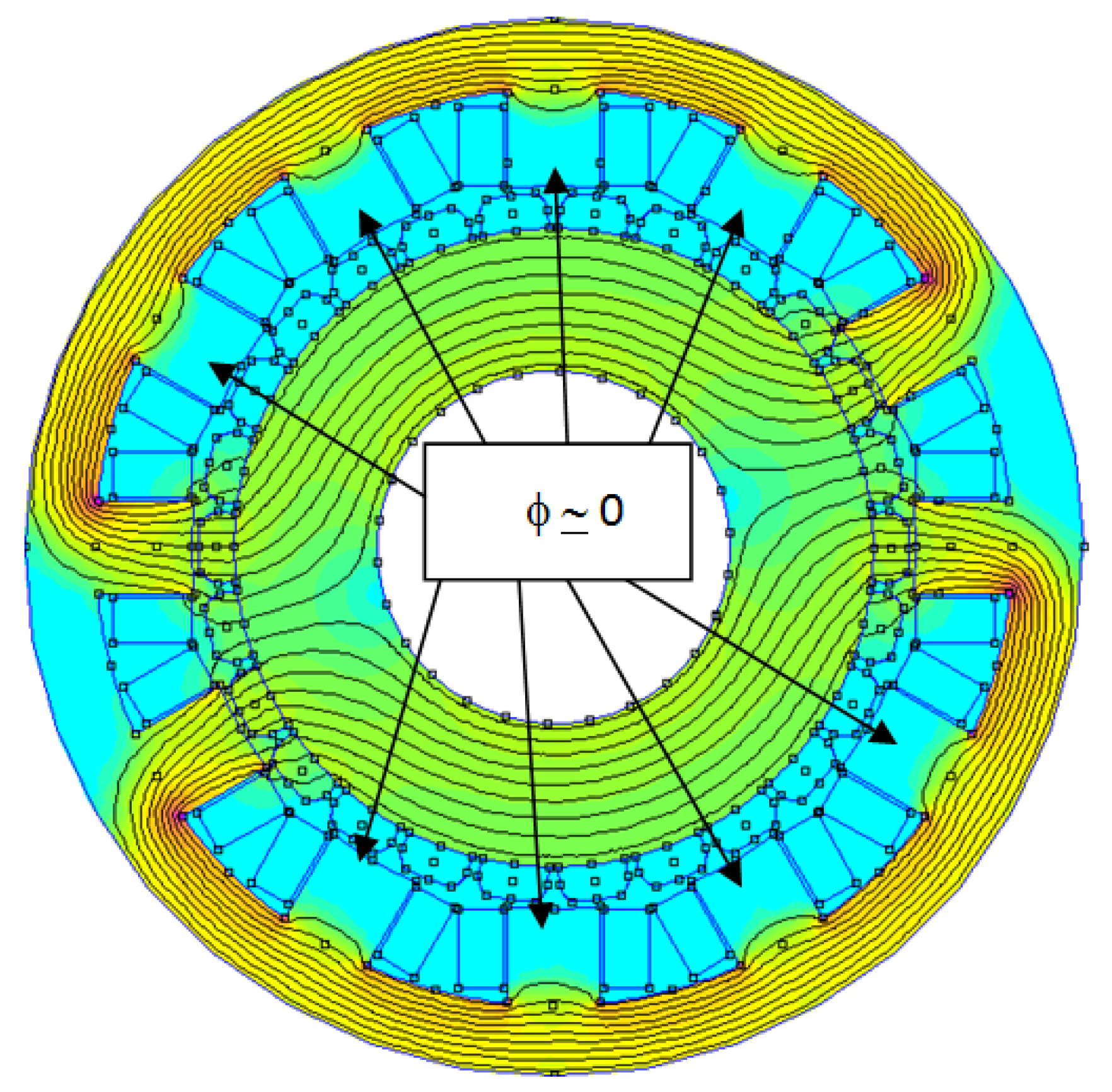
Within the result of the simulation presented in
Figure 12, an interesting property is underlined. The magnetic flux follows the back-iron core in order to close the magnetic loop. Its value into the adjacent teeth is low. This means that the back-iron core is the main path for the magnetic flux coming from the coils. The studied structure is a high-polarity machine. Traditionally, high polarity machines are designed with a stator iron core with low thickness, this rule is not always a good rule for the FSCW. This point of view can be explained with an example. In
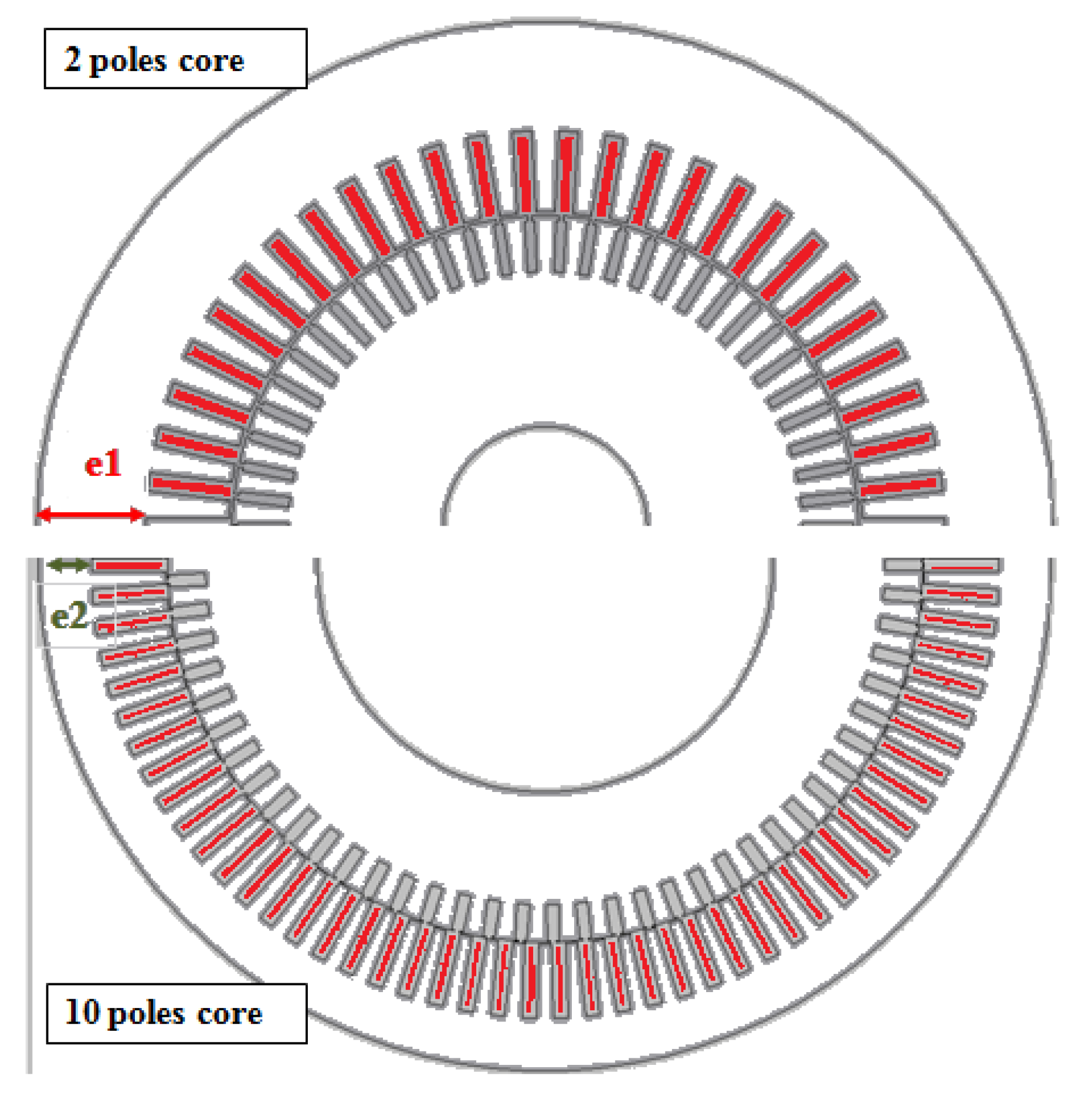
Figure 13, two traditional structures are presented, the first one, is a 2 pole asynchronous motor and the second one is a 10 pole asynchronous motor.
Figure 12.
Structures of the active part of a 26 pole 12 slot generator that uses FSCW. With four coils powered and no MMF in magnet, the flux uses a large area of the stator back iron as main path to close the magnetic loop.
Figure 12.
Structures of the active part of a 26 pole 12 slot generator that uses FSCW. With four coils powered and no MMF in magnet, the flux uses a large area of the stator back iron as main path to close the magnetic loop.
Figure 13.
Schemes of the active part of a 2 pole motor compared to the active parts of a 10 pole motor. e1 and e2 are the back-iron core thicknesses (e1 >> e2) and both of them use distributed windings.
Figure 13.
Schemes of the active part of a 2 pole motor compared to the active parts of a 10 pole motor. e1 and e2 are the back-iron core thicknesses (e1 >> e2) and both of them use distributed windings.
The design engineer knows that flux circulation in a two-pole machine uses the whole part of the stator back-iron to close the magnetic loop. With a low thickness in the back-iron core, the performances of the motor would not be acceptable. The two-pole machines have great power factor (greater than 0.9), but it cannot be sustained if the thickness of the iron core decreases. A 30% decrease in thickness is enough to get a power factor similar to an 8 pole machine. Hence, even if motors using FSCW are generally high-polarity machines, their iron core stator should not be designed with the same traditional scheme. It is a reason why, when comparisons are done, the machines using FSCW are afflicted by the worst efficiency, they have more losses, and iron losses are higher [
3]. In this reference, the authors have designed two machines with the same power (80 kW) and the same speed (300 rpm). The first one uses FSCW and the second one uses a distributed winding. As the thicknesses of the cores are very similar, even if the copper volume of the distributed windings is twice the copper volume of FSCW, the efficiency of the machine having concentrated windings is less than the efficiency of the machine having distributed windings. Thereafter, looking at the power factor, it appears that the power factor concerning the distributed windings is 0.86, which is better than the power factor associated to the concentrated windings machine, which is only 0.78. The design of the stator iron core is important and designers must also pay attention at the magnetic flux in the teeth. The reason can be found in observing a simulation of the magnetic flux distribution in the tooth. An effect appears: the tooth acts as a magnetic short circuit for the magnets during their rotation (
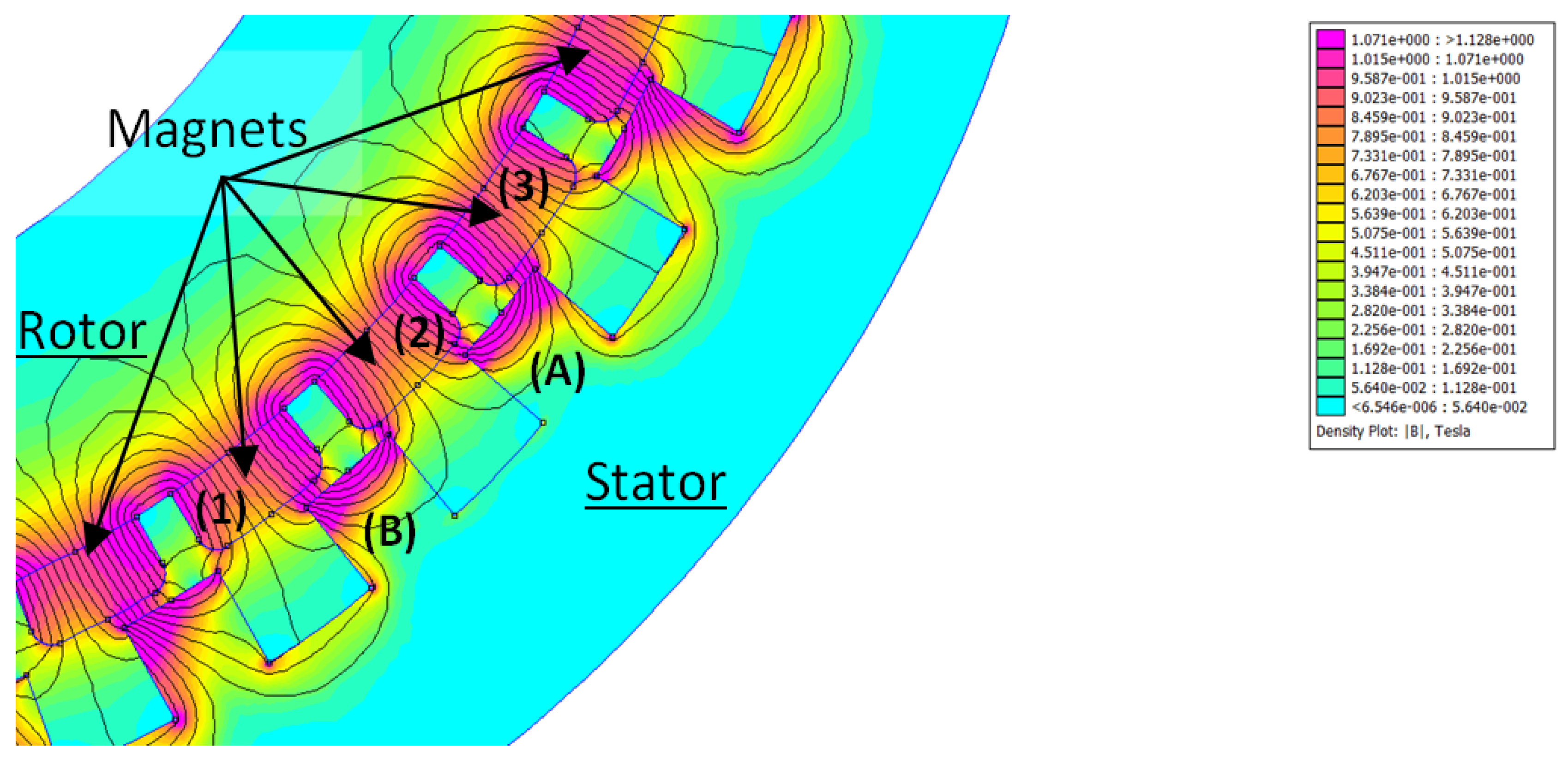
Figure 14). This leakage flux, similar to zigzag leakage flux, has a second effect when the slots are open; the magnetic flux in the tooth has a rotational behavior.
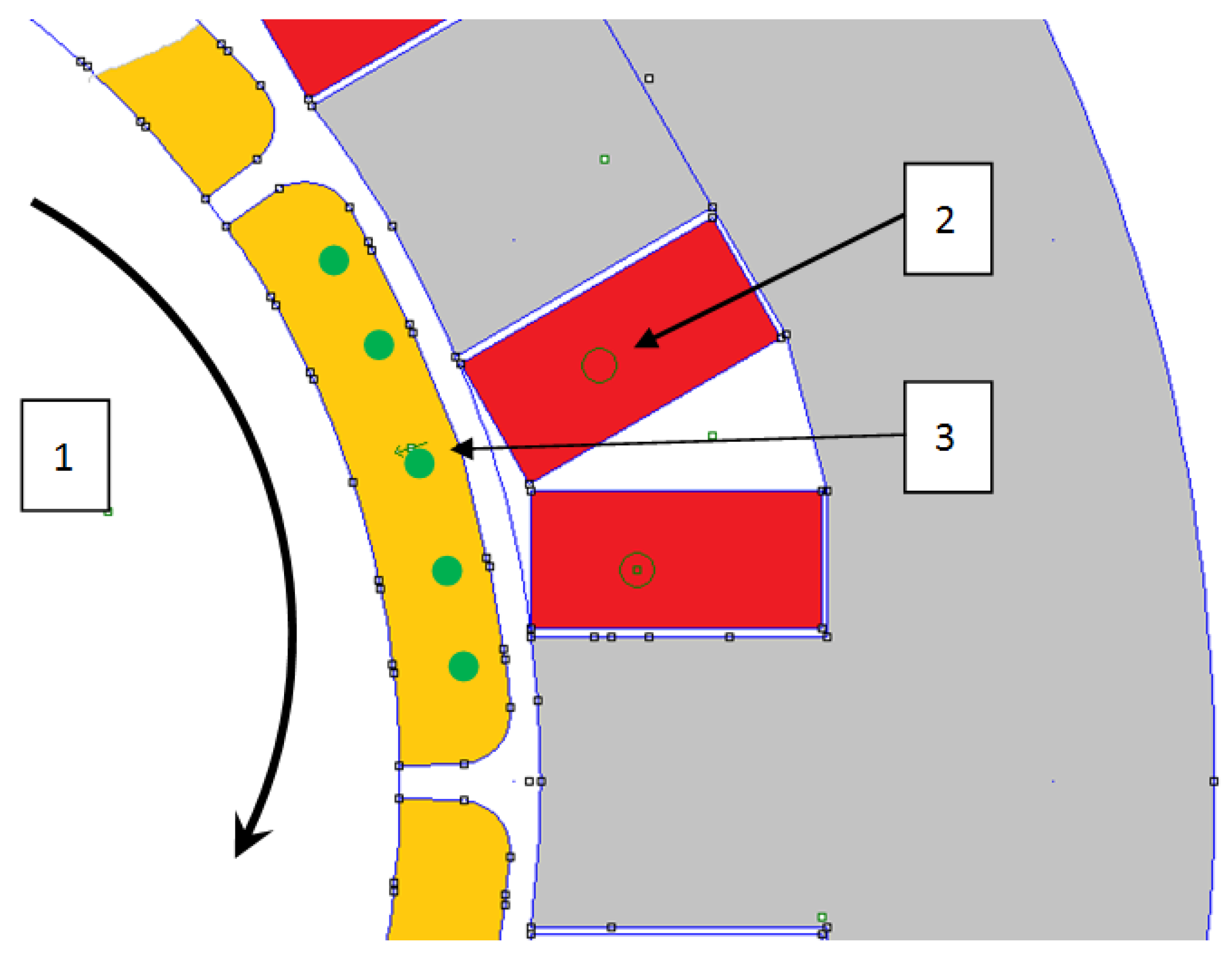
Figure 14.
In this partial view of a machine having 40 poles and 36 slots; it appears that the magnetic flux in the top of the teeth (A and B) will never be zero. When the magnets of the rotor (1, 2 or 3) are not in front of the tooth, the tooth is acting as a magnetic short circuit.
Figure 14.
In this partial view of a machine having 40 poles and 36 slots; it appears that the magnetic flux in the top of the teeth (A and B) will never be zero. When the magnets of the rotor (1, 2 or 3) are not in front of the tooth, the tooth is acting as a magnetic short circuit.
In this example, there is a part of the tooth where the flux is rotational and the iron losses must be calculated with caution. The iron losses can be underestimated if the suitable formulations are not used. In fact, two working cases have to be taken into account, The first one is the phenomenon described in
Figure 12, which is the magnetic flux circulation induced by the current in the coils, and the second one is the flux circulation induced by the permanent magnet in the teeth which is shown in
Figure 14. Within our studies at no load, it appears that about 45% of the iron losses are in the back-iron and about 55% in the teeth. These losses will increase with magnetic induction. There is nothing to do to decrease the iron losses in the teeth but it is possible to decrease the losses in the back-iron by using a greater external diameter. Doing so, the thickness of the back-iron increases and it looks like to the back-iron of a lower polarity machine. Moreover, the methods used to calculate iron losses have to be adapted [
11]. In the distributed windings, the Finite Elements Method is used as a regular method and some researchers have used this method and have investigated the impact of rotational magnetic fields in these machines [
32]. As the rotational behavior does not significantly alter the iron losses calculation, the regular method has not been enhanced. In our case, the permanent magnet generators used in variable-speed operations also have frequencies that differ wildly from 50 or 60 Hz. Hence, data about iron losses in the magnetic steel have to be determined with measurements and tests, as they are not always provided as usable data by manufacturers [
33,
34,
35]. As a conclusion, designers have to integrate a lot of information in their designs and have to adapt the losses calculation. It remains that iron losses are important in FSCW. This explains why the magnetic steel used is sometime the 35RM300 grade in order to decrease the iron losses.
8. Rotor and Magnet Losses
The magnets which are mounted on the surface of the rotor are subject to eddy current losses [
36]. Methods of calculation are accurate in distributed windings [
37]. Such methods are not so convenient for FSCW. With the same stator, it is possible to build more than one machine. For example, a stator having 12 slots can be coupled to a rotor with 10 poles or a rotor with 14 poles. As the number of slots is close to the number of pole, these machines have a high winding factor, 0.966 for single layer and 0.933 for double layer. The air-gap has many magnetic field harmonics with which both rotors can synchronize. Even if this can be considered as an advantage and versatility for the structure, the magnetic field harmonics, which are not synchronized with the rotor speed, induce eddy-currents in the magnets mounted on the rotor and they increase the magnets’ temperature [
38,
39]. The choice of the combination of the number of poles and number of slots can increase or decrease the losses in permanent magnets as it acts on the harmonic content in the air-gap. The suitable value for slot/pole.phase which decreases magnet losses will not be this the one which gives the highest winding factor [
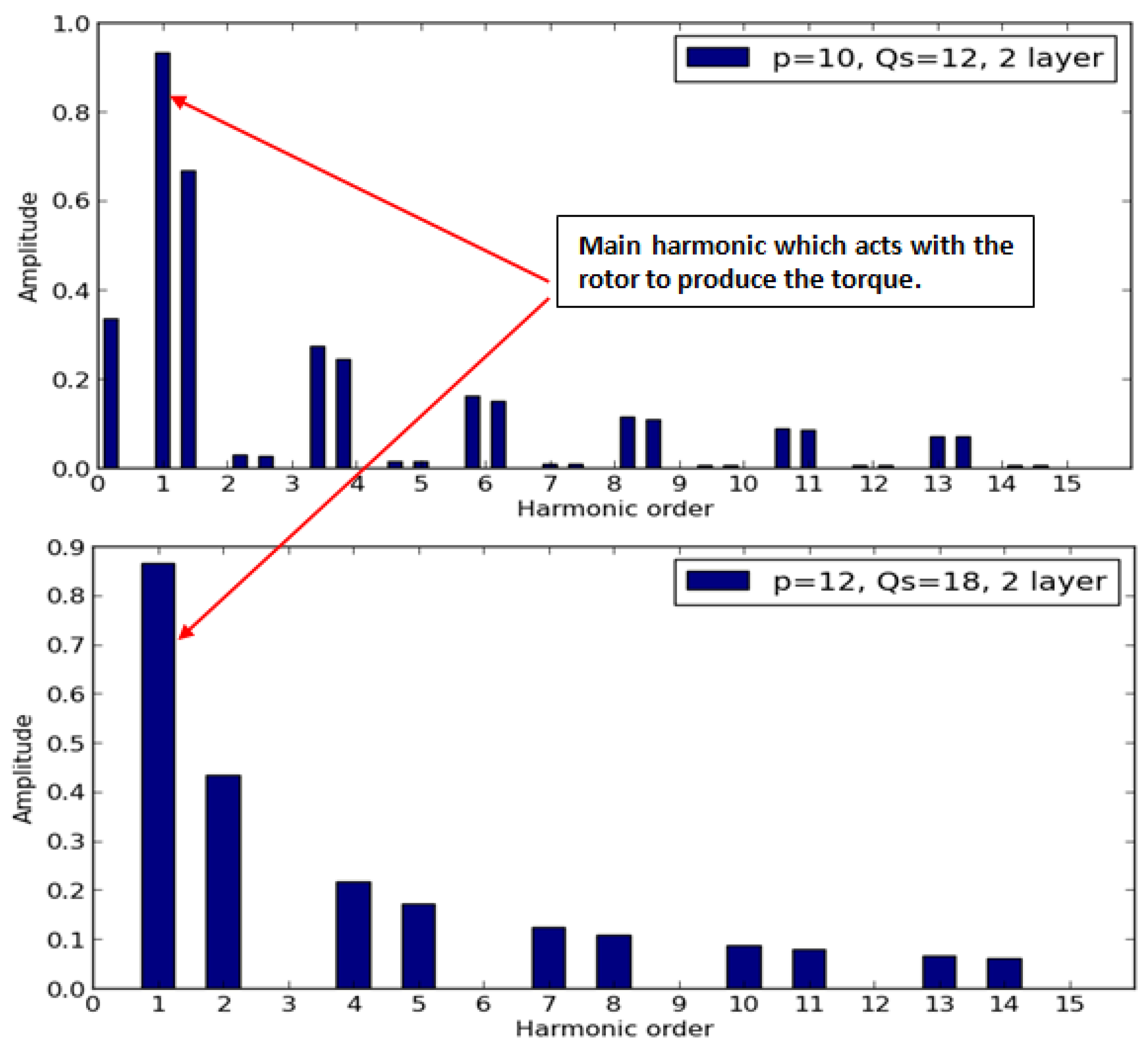
40]. The two requirements are not straightforward. As it appears in
Figure 15, the 12 poles/18 slots structure has fewer harmonics than the 10 poles/12 slots structure. Hence, losses caused by eddy currents in the magnets are the lowest [
41]. Unfortunately, the winding factor associated to the main harmonic (number 1 in
Figure 15) is not the highest. It is usual to consider that the best choice, regarding magnet losses, is
q = 0.5, with a small decrease in winding factor (
Table 2).
It is possible to set the magnet losses to zero. The progress in bonded magnets is regular and they can be used in place of sintered magnets. Nevertheless, their characteristics, such as Br of Hc, are inferior. Such a solution can be used only if a decrease in magnetic flux is accepted [
42]. Another solution consists in decreasing the strength of the magnetic flux harmonics to keep the temperature of the magnets under the highest temperature of use (
Table 3). Losses in the magnets are not the main source of losses. They do not really modify the efficiency of the machine, but they can damage the magnets if the temperature remains above the maximal allowed temperature. The first damage is a decrease of Br and Hc. This phenomenon is characterized by coefficients which are always negative [
43].
Figure 15.
Amplitude of MMF in the air-gap as a function of harmonic rank. Even if the 12-pole/18-slot configuration has fewer harmonics, amplitude of its main harmonic is lower than the amplitude of the main harmonic of the 10-pole/12-slot configuration.
Figure 15.
Amplitude of MMF in the air-gap as a function of harmonic rank. Even if the 12-pole/18-slot configuration has fewer harmonics, amplitude of its main harmonic is lower than the amplitude of the main harmonic of the 10-pole/12-slot configuration.
Table 2.
Comparison between the winding factors of two machines having different number of slots per pole per phase.
Table 2.
Comparison between the winding factors of two machines having different number of slots per pole per phase.
| Main Characteristics |
|---|
| 12 slots/10 poles | 18 Slots/12 poles |
| q = 0.4 (Slot/Pole. Phase) | q = 0.5 (Slot/Pole. Phase) |
| Kw = 0.933 (Winding factor) | Kw = 0.866 (Winding factor) |
Table 3.
Magnet, Temperature of use (Max).
Table 3.
Magnet, Temperature of use (Max).
| Main Characteristics |
|---|
| Ferrite | 280 °C |
| AlNiCo | 540 °C |
| SmCo | 300 °C |
| NdFeB | 80 °C |
Unfortunately, the NdFeB is a magnet having the highest level of energy density and it is three time more sensitive to the temperature than the SmCo magnet. The reversible temperature coefficient (RTC) of residual induction, Br, is only about −0.035%/°C for SmCo based magnets as compared to −0.110%/°C for NdFeB based magnets [
44,
45]. Usually the NdFeB magnets are called: magnets for room-temperature applications. The technology of magnets is always in evolution. Even if the recent NdFeB technology reaches the practical performance limits in stored energy (510 kJ/m
3), improvements in temperature tolerance are in progress with the use of another rare-earth material: dysprosium. Therefore, machine designers should not limit their designs compared to the magnet capabilities; they can evolve in a short time. Selecting the magnets which accept a high working temperature is not always a good solution. This means that the rotor would accept a greater operating temperature and the losses will always exist. The solutions that decrease losses must be preferred. Two methods have been examined. The first one is based on the winding layout. Some researchers are working on asynchronous machines which are using FSCW [
7], the magnetic field harmonics in this machine are not acceptable and any progress in this domain will be a benefit for both synchronous and asynchronous machines. The second one focuses on the magnets. The sintered magnets are segmented and that will reduce the effects of eddy currents [
46]. The solutions that have been developed here is based, in part, on the winding layout: the use of the double-star structure. Such a structure is able to decrease the magnetic flux harmonics in the air-gap and also enhances the winding factor. Nevertheless, the use of the double-star structure is only possible if the slots are totally open [
29], and opened slots do not have a good influence on the losses in the magnets [
47]. The issue will be discussed later.
As it will be highlighted, the most dangerous harmonics are harmonics which rotate at high speed in front of the rotor speed. It means that the undesirable harmonics are the first, below the main harmonic which produces the torque. For example, in
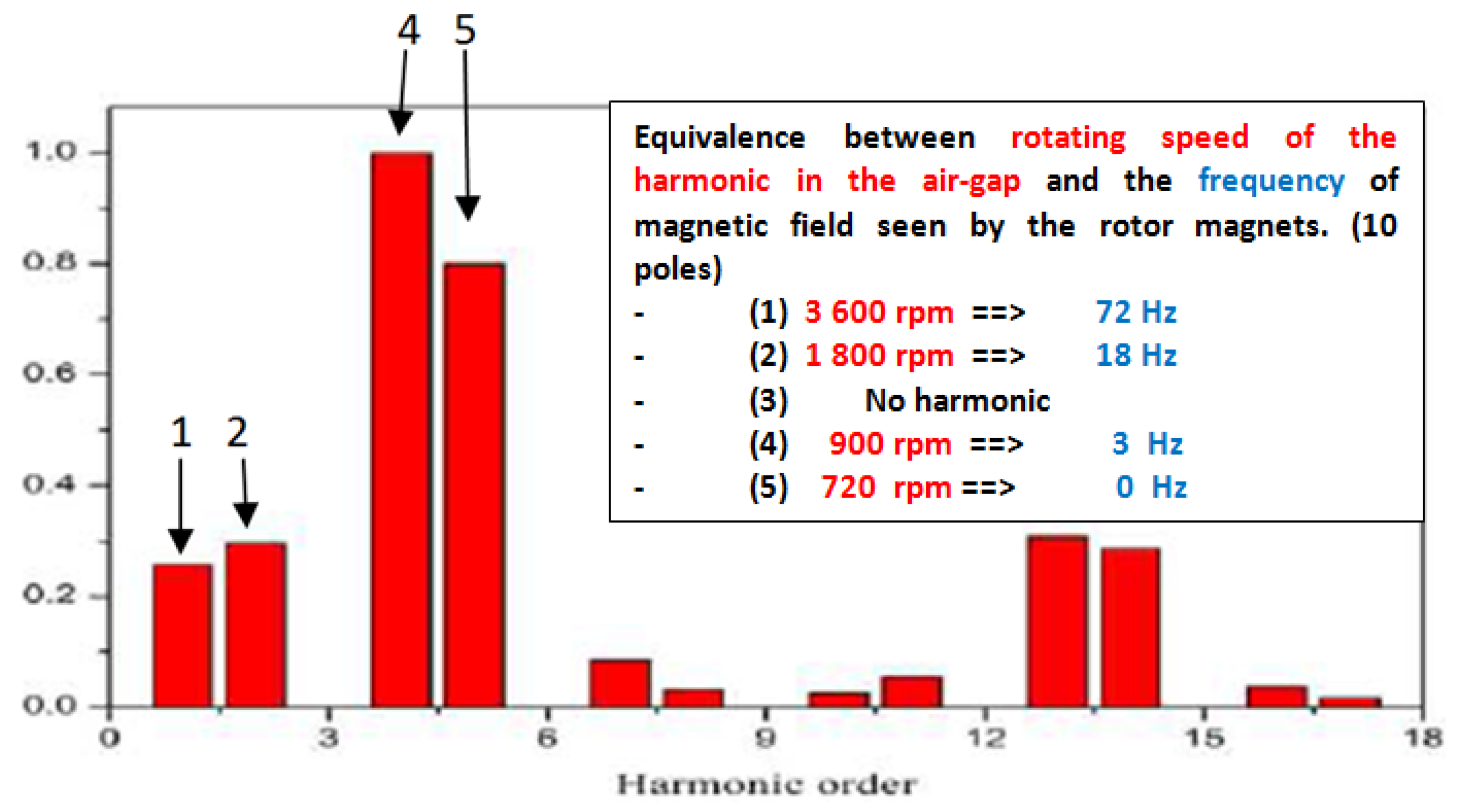
Figure 16, the spectrum of MMF in the air-gap is represented. The main harmonics are used to provide an 8-pole or a 10-pole machine. If this machine is supplied by a 60 Hz power line, the rotor can rotate at 900 rpm (8-pole) or 720 rpm (10-pole). The first harmonic rotates at 3600 rpm and the second at 1800 rpm. Hence, for a 10-pole motor, the first harmonic is seen, by the rotor, as a rotating field running at 4320 rpm. For an observer which is link to the rotor, such a magnetic field is seen as a variable magnetic field which frequency is 72 Hz. The high order harmonics, greater than eight, are seen as magnetic fields with low rotating speeds and also having low amplitudes. The main goal is in the reduction of the harmonic amplitudes below the main harmonic, as they involve high losses in the magnets supported by the rotor. A harmonic which is close to the main harmonic can be an issue for the magnet losses. Its amplitude is high and it cannot be suppressed; its presence is a specificity of the FSCW.
Figure 16.
The amplitudes of magnetic field harmonics in the air-gap selected by rank in a 9-slot structure. The two main harmonics (four and five) can provide an 8-pole machine or a 10-pole machine. For a 10-pole machine, the harmonics of magnetic fields generate variable magnetic fields for the rotor. Their frequencies, for an observer link to the rotor are given in the upper part of the figure (10-pole). Notice the null frequency for the harmonic five, the rotor is synchronized with it.
Figure 16.
The amplitudes of magnetic field harmonics in the air-gap selected by rank in a 9-slot structure. The two main harmonics (four and five) can provide an 8-pole machine or a 10-pole machine. For a 10-pole machine, the harmonics of magnetic fields generate variable magnetic fields for the rotor. Their frequencies, for an observer link to the rotor are given in the upper part of the figure (10-pole). Notice the null frequency for the harmonic five, the rotor is synchronized with it.
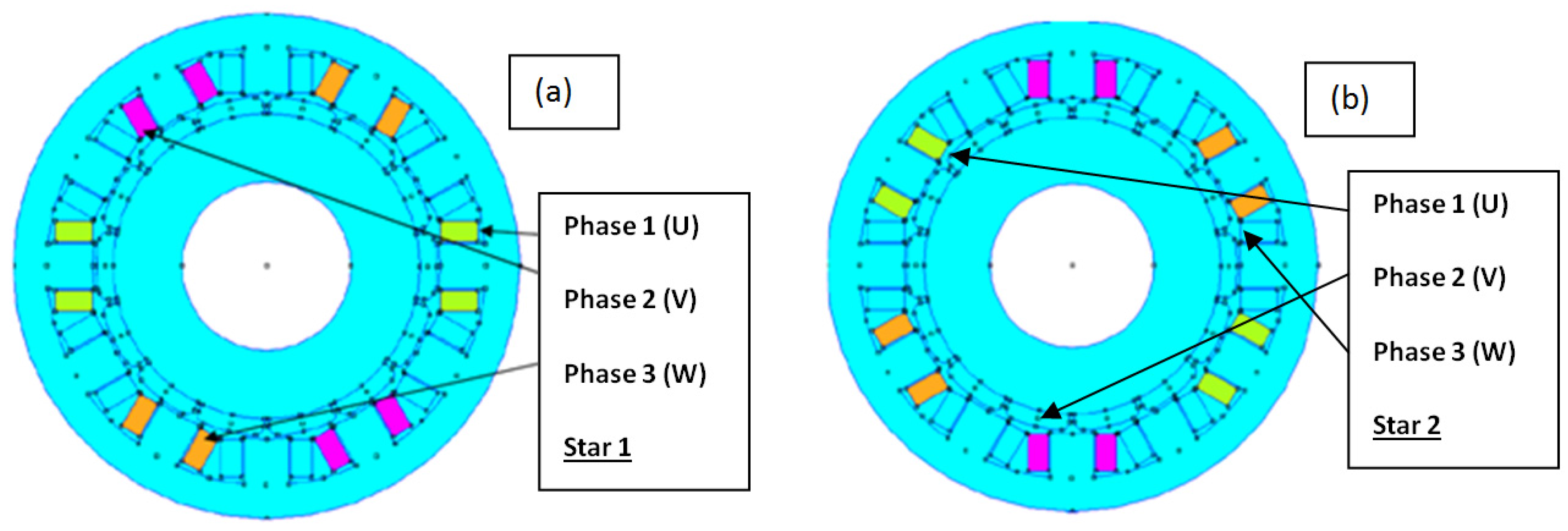
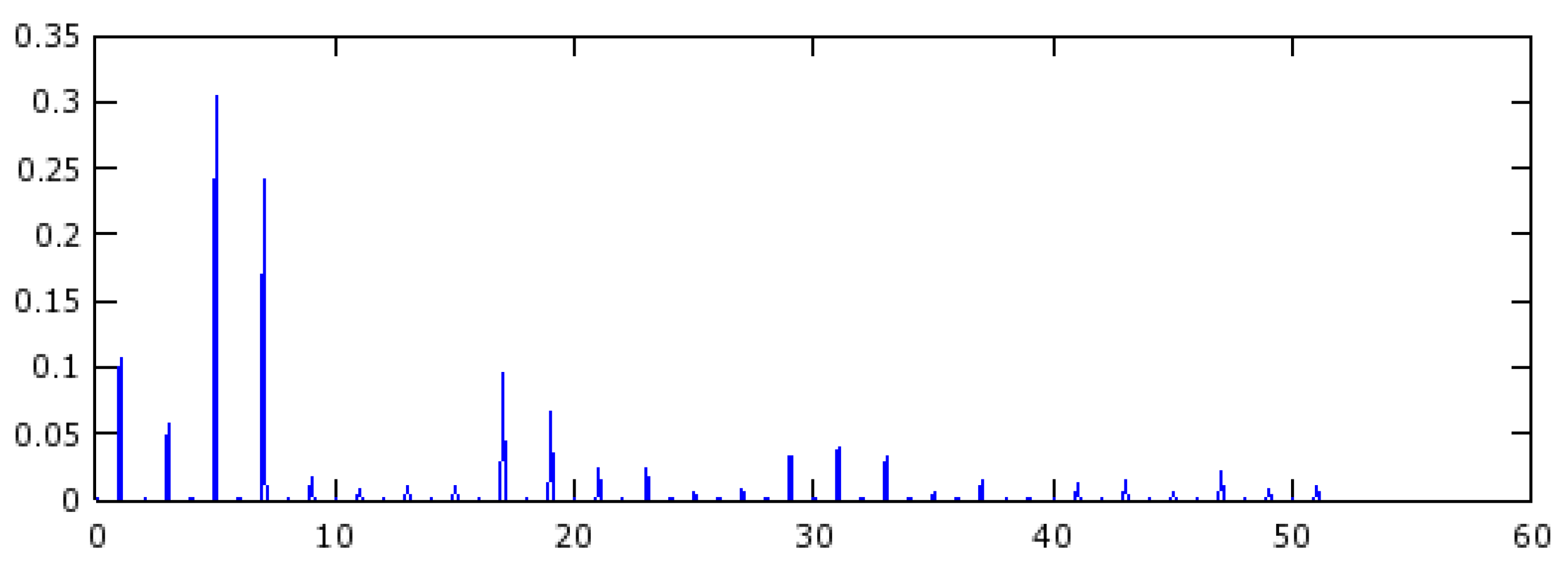
Using simulations, it appears that MMF harmonics, especially the low-order harmonics can be mitigated by using a double-star winding structure. To demonstrate this property, the machine having 14 poles and 12 slots is supplied by two different methods. In the first one, the two stars (
Figure 10) are fed by two three-phase power supplies which are synchronous. With these power supplies, the FFT of the MMF in the air gap is presented in
Figure 17. As it is expected, the harmonics five and seven are the most important harmonics as they provide a machine with 10 poles and a machine with 14 poles, the harmonics one and three are not negligible.
Figure 17.
The amplitudes of MMF harmonics in the air-gap. The 12-slot structure is fed by two three-phase supplies. The currents are synchronous.
Figure 17.
The amplitudes of MMF harmonics in the air-gap. The 12-slot structure is fed by two three-phase supplies. The currents are synchronous.
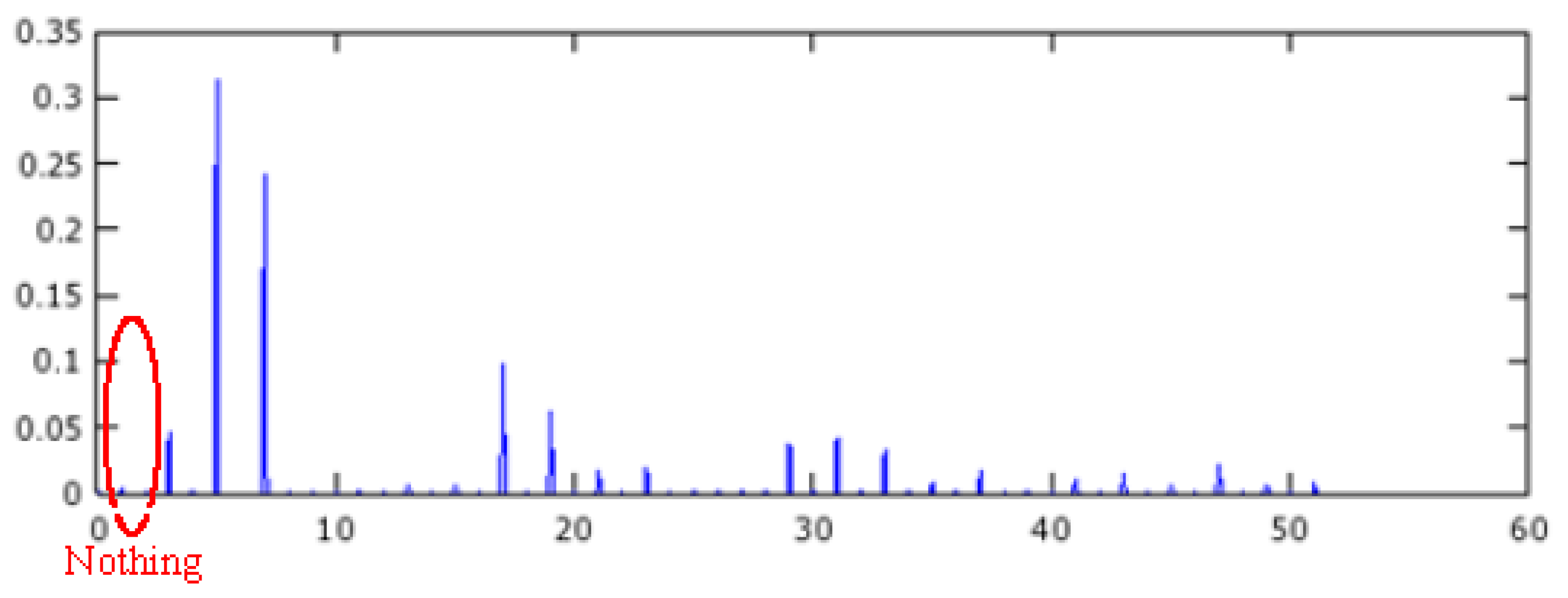
Now, the 12 slots structure is supplied by two three-phase supplies which are shift electrically by 30°. It is a true double-star machine. The FFT of the MMF in the air-gap is presented in
Figure 18. It appears that the first harmonic has vanished. Using an electrical supply that is adapted to the magnetic structure of the machine can have a positive impact on the losses.
Figure 18.
The amplitudes of harmonics of the MMF in the air-gap. The 12-slot structure is fed by two three-phase supplies shift electrically by 30°. The first harmonic has vanished.
Figure 18.
The amplitudes of harmonics of the MMF in the air-gap. The 12-slot structure is fed by two three-phase supplies shift electrically by 30°. The first harmonic has vanished.
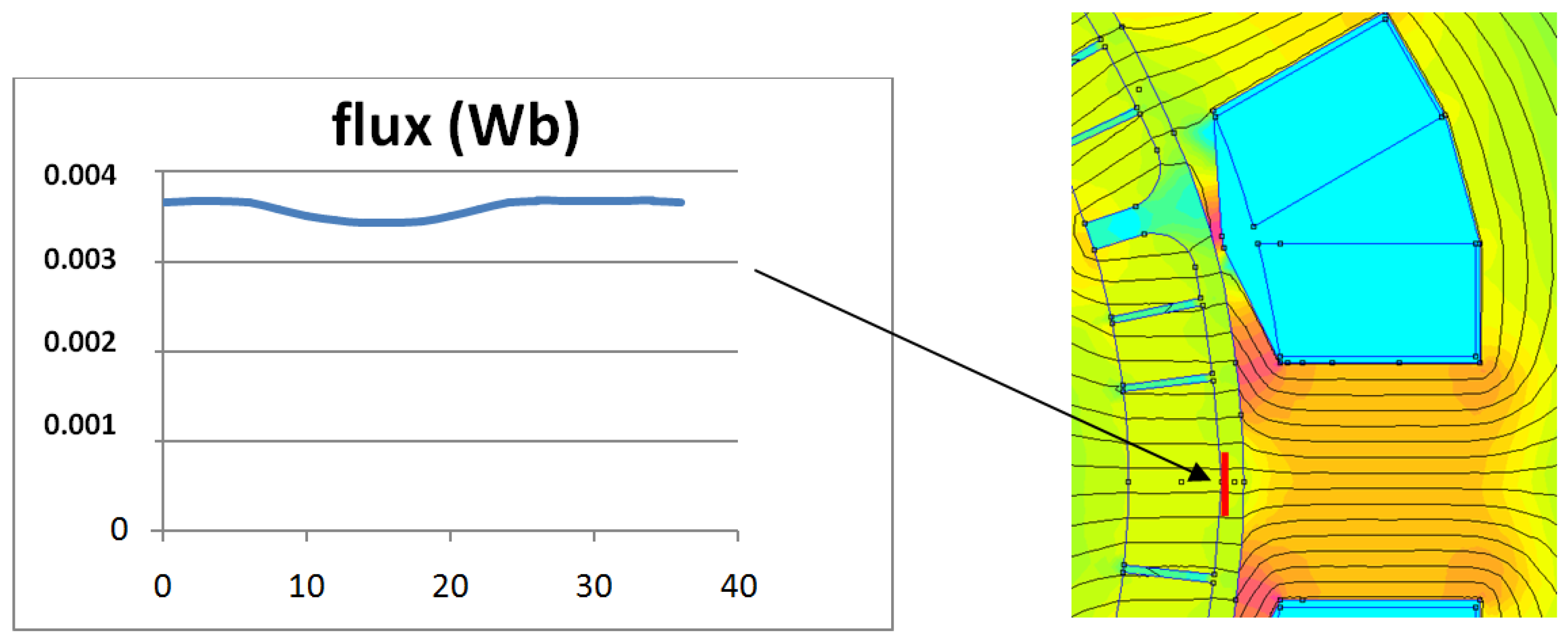
It is time to investigate the influence of slotting for magnet losses. Such a phenomenon is well known in distributed winding [
48]. It can be more important with FSCW. When the intensity of magnetic flux is calculated through the surface of a magnet during the rotation of the rotor, a variation appears. In the
Figure 19 and
Figure 20, two slot shapes are compared. In
Figure 19, the slots are closed and the evolution of magnetic flux on the surface of one magnet is not highly dependent on the rotor position. In
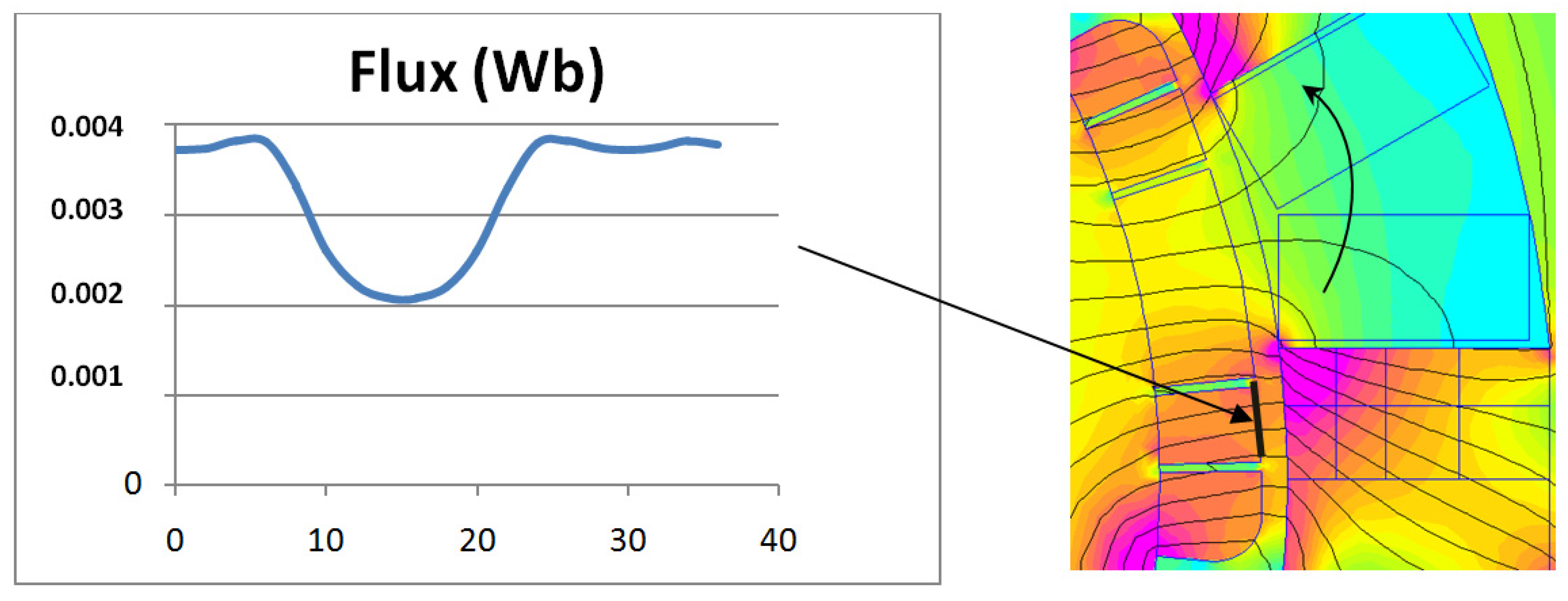
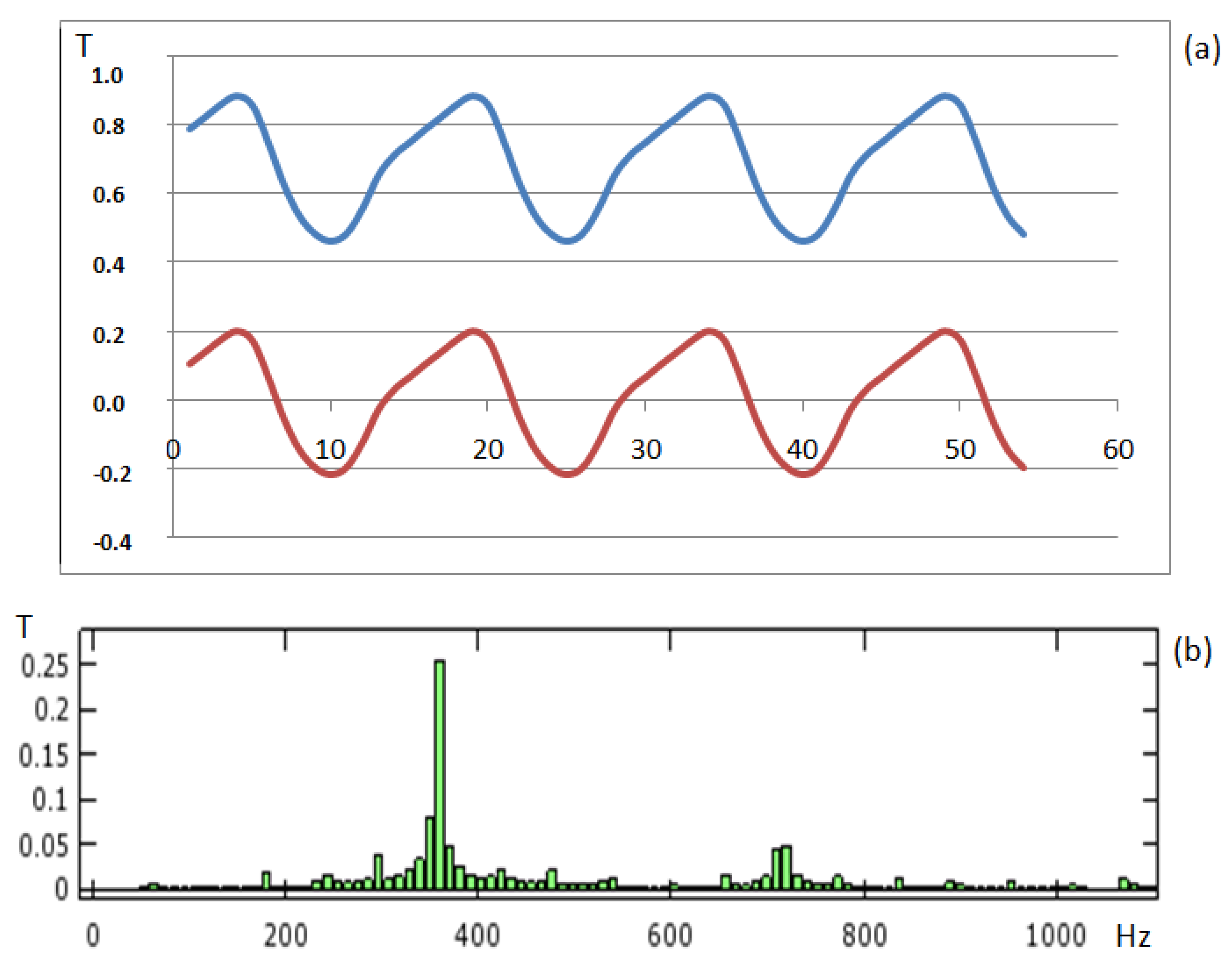
Figure 20, the situation is different. A high level of flux fluctuations is visible; such fluctuations can be observed in axial flux machine where the slots are opened [
49]. This phenomenon will induce eddy currents in the magnet and this fluctuation is high enough to generate eddy currents which will exceed the losses associated with the MMF harmonics in the air-gap (
Figure 18). For example, using
Figure 20, the magnet is subjected to a variable magnetic flux which intensity is 0.2 T and its frequency is 600 Hz if the rotor rotates at 3000 rpm. In front of such a phenomenon, the opened or closed slots will remain an issue. With the closed slots or half-closed slots, the permanence of the magnetic circuit attached to the magnet is constant, but there is a high level of magnetic flux leakage, both for the magnetic flux generated by the magnets and for the magnetic flux generated by the coils. In one of our simulations, 15% of the flux provided by the magnets flows through the slot depression and 30% of the flux provided by the coils also flows through the slot-depression. They are leakage fluxes that do not provide torque. They only generate losses. With opened slots, these leakage fluxes are drastically minimized. The use of opened slots has allowed the use of multi-star structures as it suppresses the magnetic coupling between stars. Unfortunately, this use also provides drawback: magnetic flux ripples are increasing in the air-gap and the rotor losses, especially the magnet losses, must be managed.
Figure 19.
At no load, the rotor position is increasing step by step (0° to 36°). For each position, the flux on one magnet surface is plotted. As the slots were closed, the slot depression mitigates the permeance variation and the flux remains nearly constant.
Figure 19.
At no load, the rotor position is increasing step by step (0° to 36°). For each position, the flux on one magnet surface is plotted. As the slots were closed, the slot depression mitigates the permeance variation and the flux remains nearly constant.
Figure 20.
At no load, the rotor position is increased step by step (0° to 36°). For each position, the flux on one magnet surface is plotted. The slots are opened, there are high permeance variations, and the flux in the magnet is affected by high fluctuations which induce eddy currents.
Figure 20.
At no load, the rotor position is increased step by step (0° to 36°). For each position, the flux on one magnet surface is plotted. The slots are opened, there are high permeance variations, and the flux in the magnet is affected by high fluctuations which induce eddy currents.
The losses generated by the eddy currents are harmful for magnets. The usual solution is in the segmentation [
42,
50,
51]. Such segmentation is also a good solution when the machine, acting as generator, is used to feed a rectifier load. This load provides a high level of current harmonics [
17], as summarized in
Table 4. The magnets segmentation can be optimized with regard to the number and the shape of the magnets [
52,
53,
54]. In many articles, the losses associated to this flux tooth ripple are not considered. In the studies of machines that use FSCW, the slots are half-closed or closed. Flux tooth ripple is mainly treated in permanent magnet machines which often rotate at high speed or in axial flux machines. Authors of articles that concern such machines do not recommend a subdivision of the problem. If the harmonic losses and tooth ripple losses are calculated with two separate methods and are added at the end of the design, the total losses will not be accurate. In our case, the most important effect is caused by the flux tooth ripples. Nevertheless the design of the magnet will be done with a global method. Hence, the effects of any eddy currents are minimized (those coming from tooth ripples and those coming from MMF harmonics). Moreover, doing simulations which are time consuming to calculate eddy current losses is not realistic in pre-determination of a machine. There is no need to involve 3D simulations; losses which are calculated are limited to eddy-current losses. Simple studies that are using 2D simulations and analytic calculations can provide usable results. Designers have to know that hysteresis losses also exist in the magnets and they are not considered here [
55].
Table 4.
The segmentation of magnets and its impact on losses mitigation when the machine acts as generator and feeds a rectified load (Results reproduced with the permission of the authors: D. Gerling [
52]).
Table 4.
The segmentation of magnets and its impact on losses mitigation when the machine acts as generator and feeds a rectified load (Results reproduced with the permission of the authors: D. Gerling [52]).
| Number of Magnet Segmentation | Losses Decrease in% |
|---|
| 1 (no segmentation) | 0% |
| 2 | 80% |
| 3 | >90% |
| 4 | >95% |
Segmentation is a straightforward method which also reduces the difficulties of calculation in loss evaluation. The magnets are good electrical conductors and are subject to eddy currents. The segmentation transforms large conductive volumes into small volumes. Hence, doing so, these volumes also are small in front of the skin effect. Losses per unit volume can be evaluated using the conventional Equation (1) which does not require a 3D simulation [
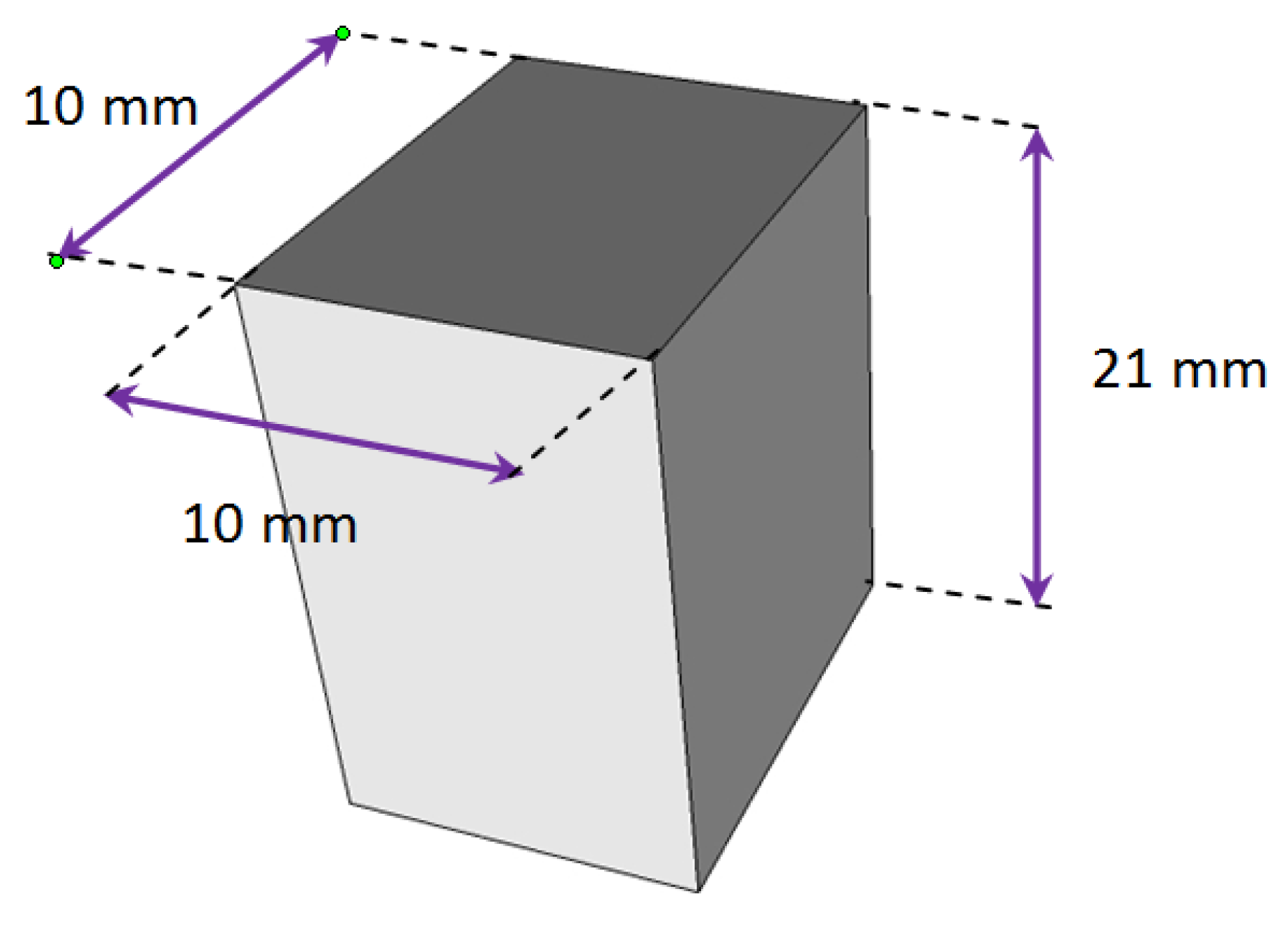
56],
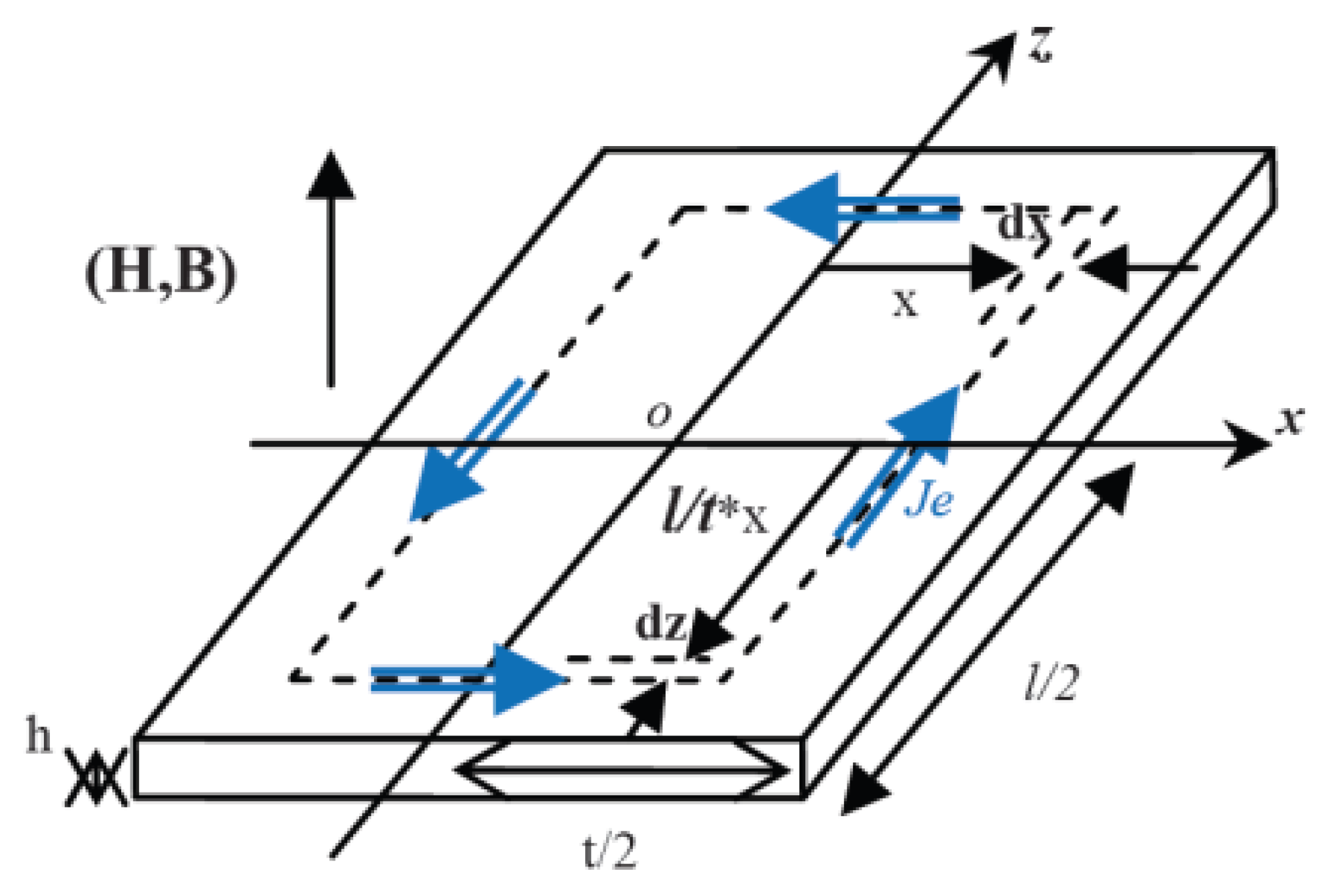
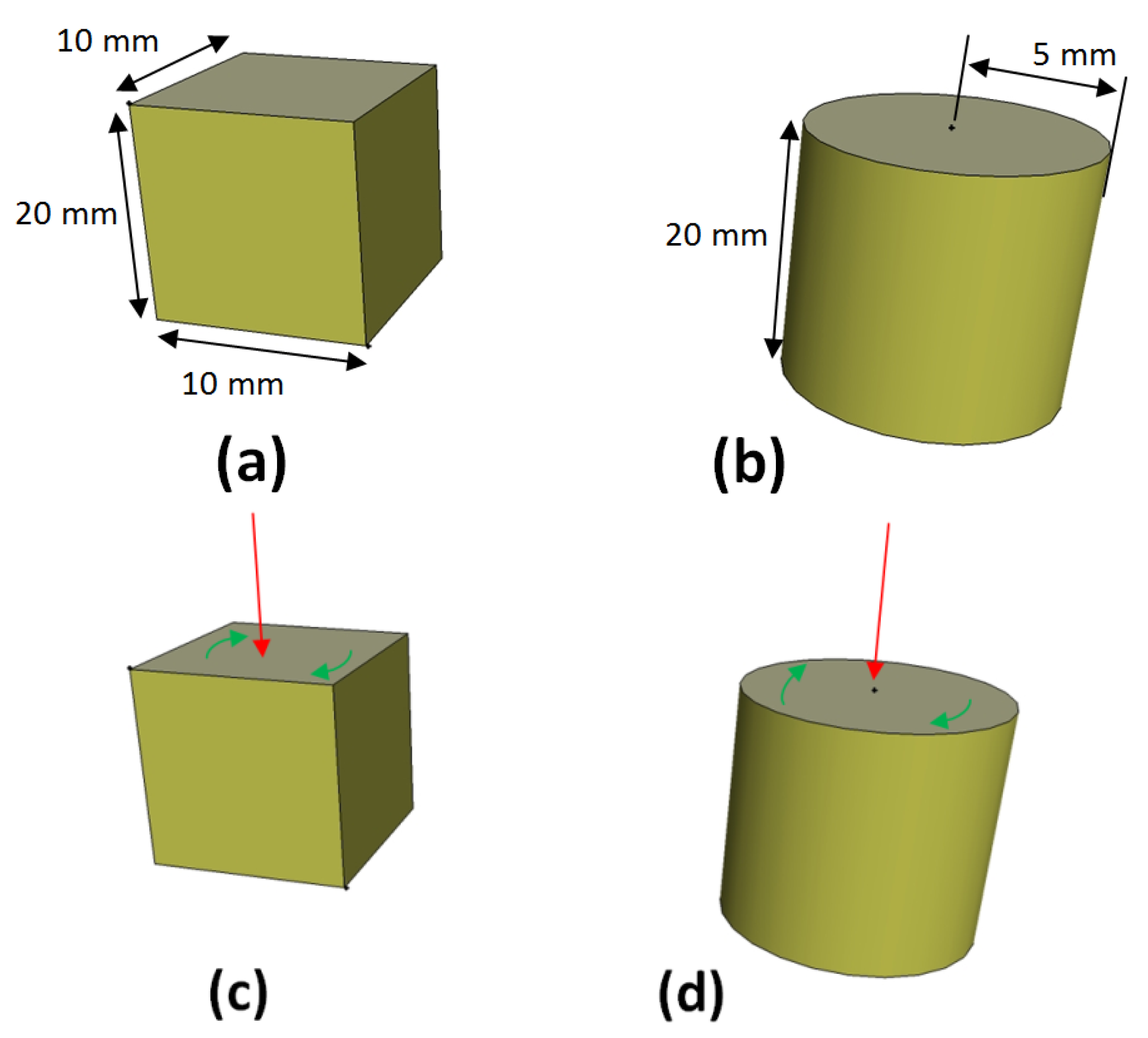
f is the magnetic field frequency,
Bm is its peak strength, ρ is the electrical conductivity of the medium and
t and
l are geometrical parameters described in the
Figure 21.
Such analytical formulation can provide good evaluation for magnet losses as long as it is used in suitable situations. Hence, such a loss calculation must be verified to provide a sufficient accuracy in evaluation of machines efficiency. In the Subsection 9.5, a brief study is done to validate the method.
Figure 21.
Scheme used for the calculation of eddy currents losses in a conductor sheet in case of neglected skin effect. This means that the thickness of the sheet is small in front of the skin depth.
Figure 21.
Scheme used for the calculation of eddy currents losses in a conductor sheet in case of neglected skin effect. This means that the thickness of the sheet is small in front of the skin depth.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






















