
A Genetic Algorithm-Controlled Solar Tracker Robot with Increased Precision Due to Evolution

Abstract
:1. Introduction
2. Problem Solving
2.1. Theoretical Background
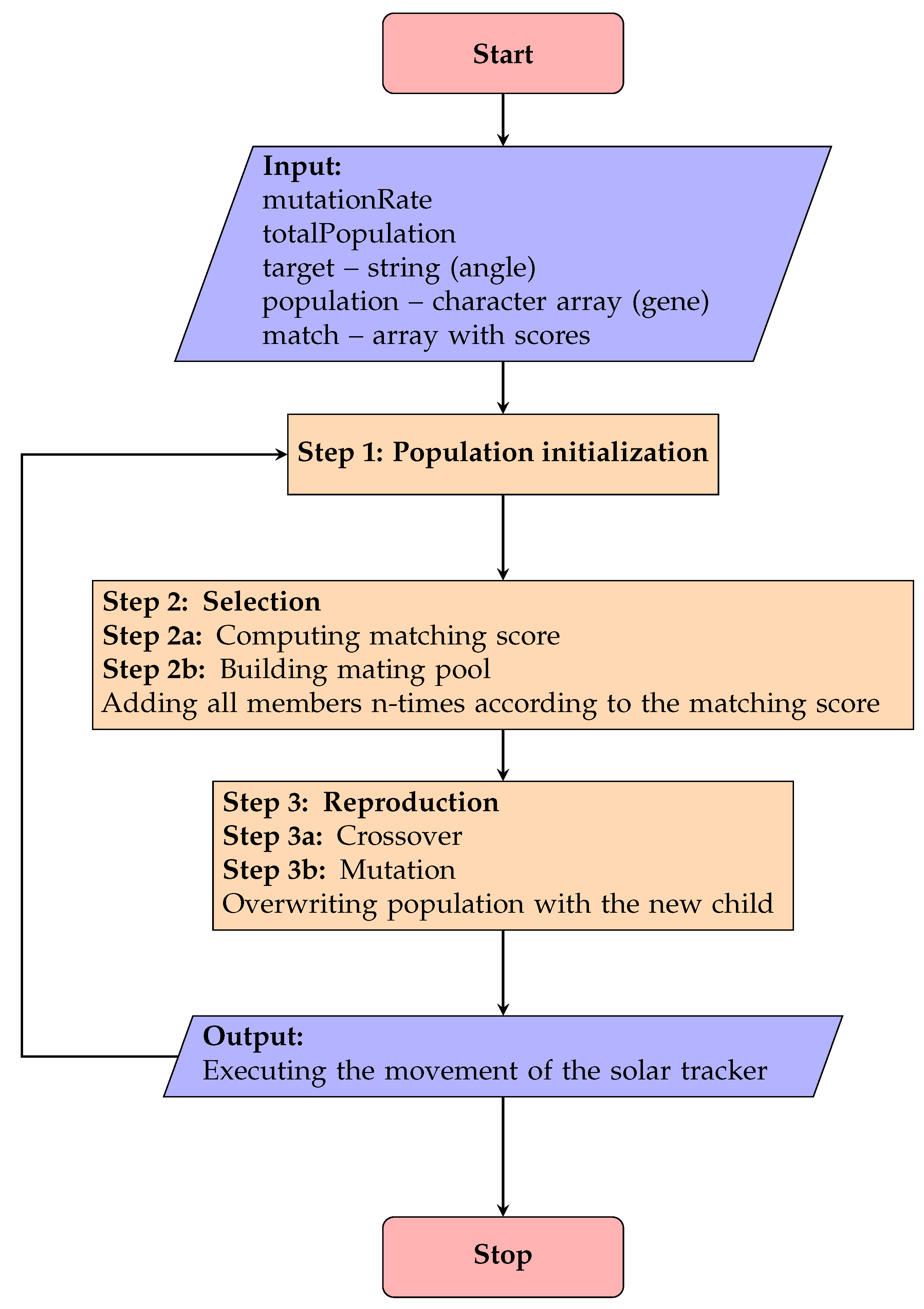
2.2. The Proposed Genetic Algorithm
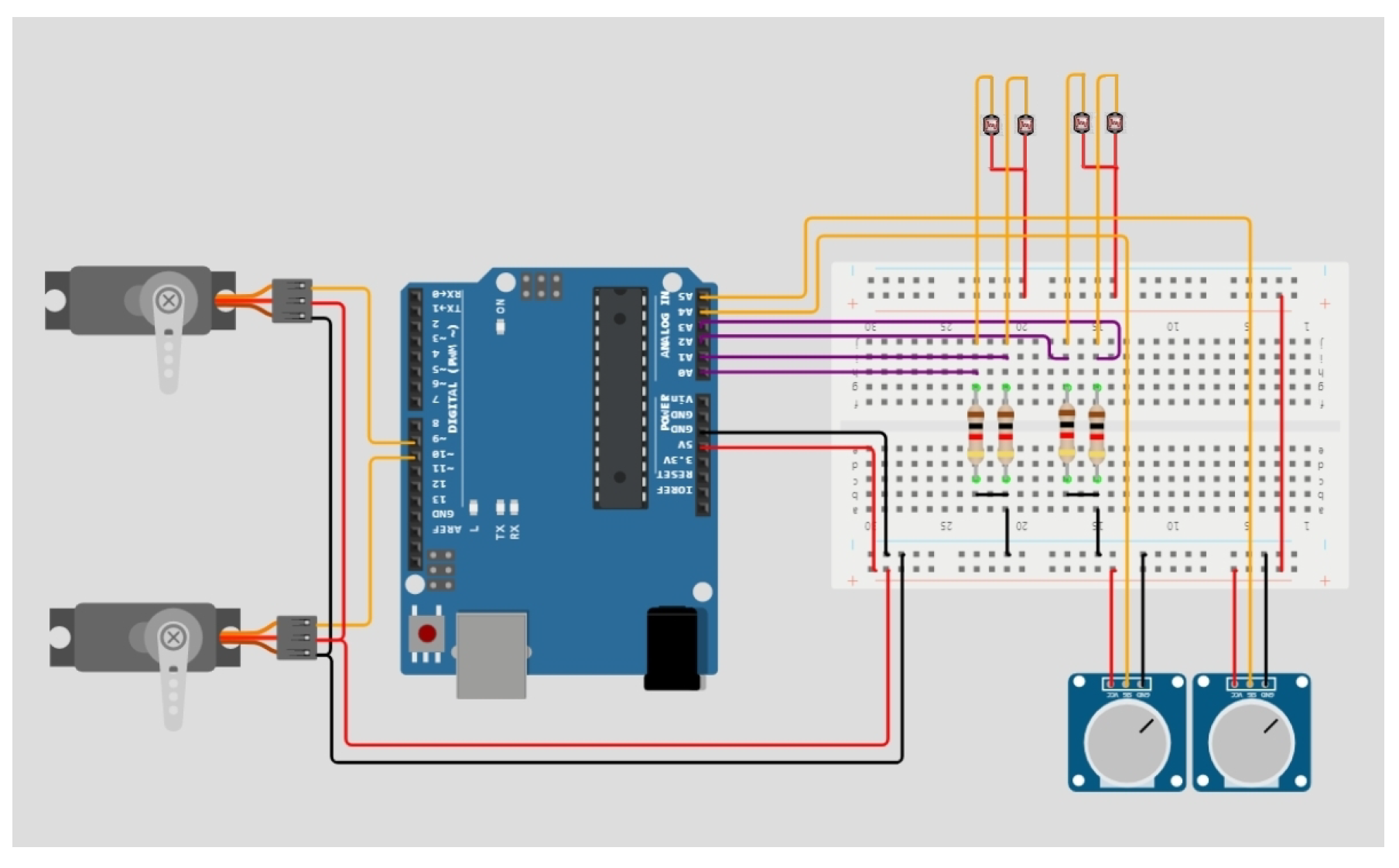
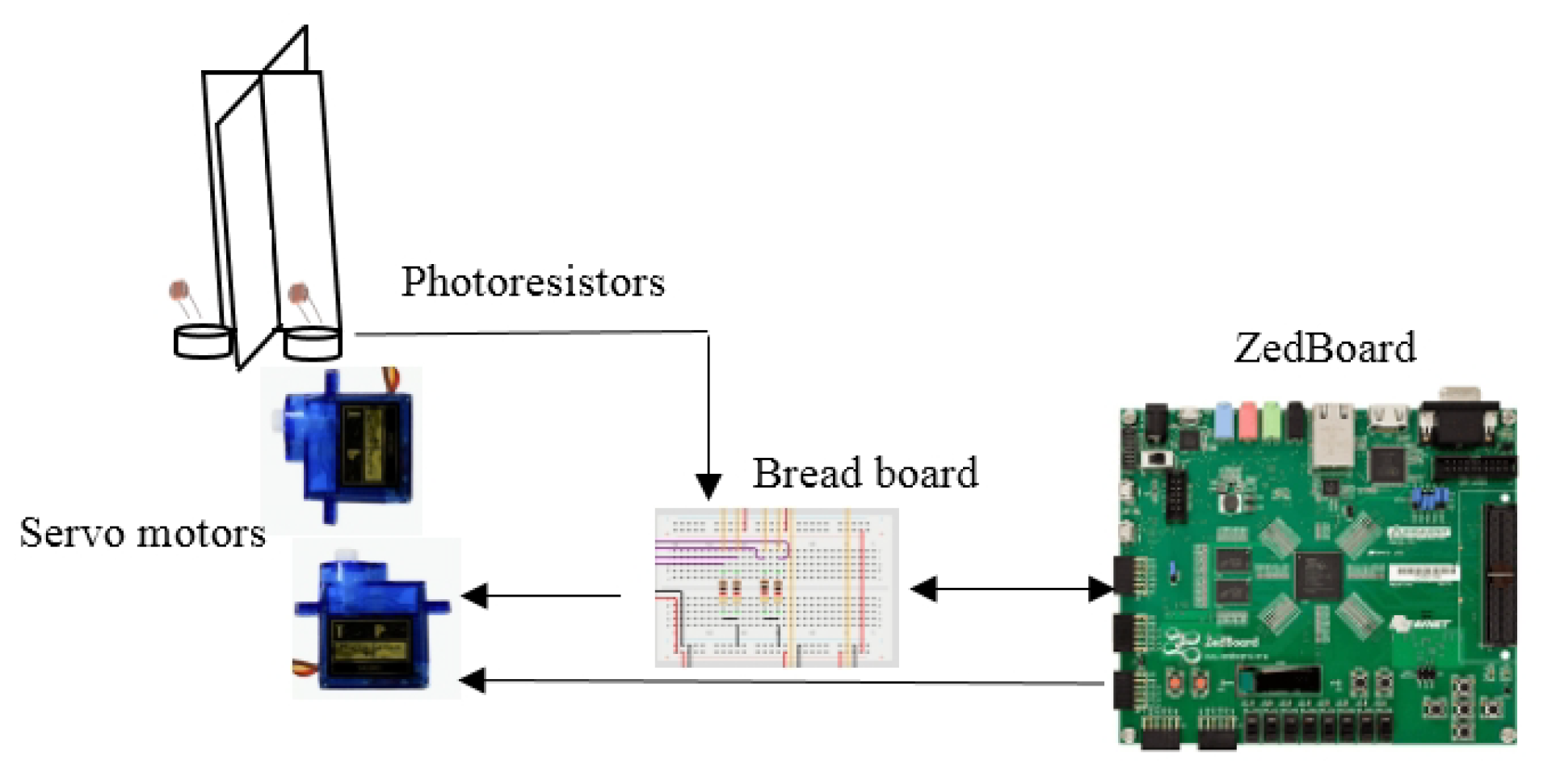
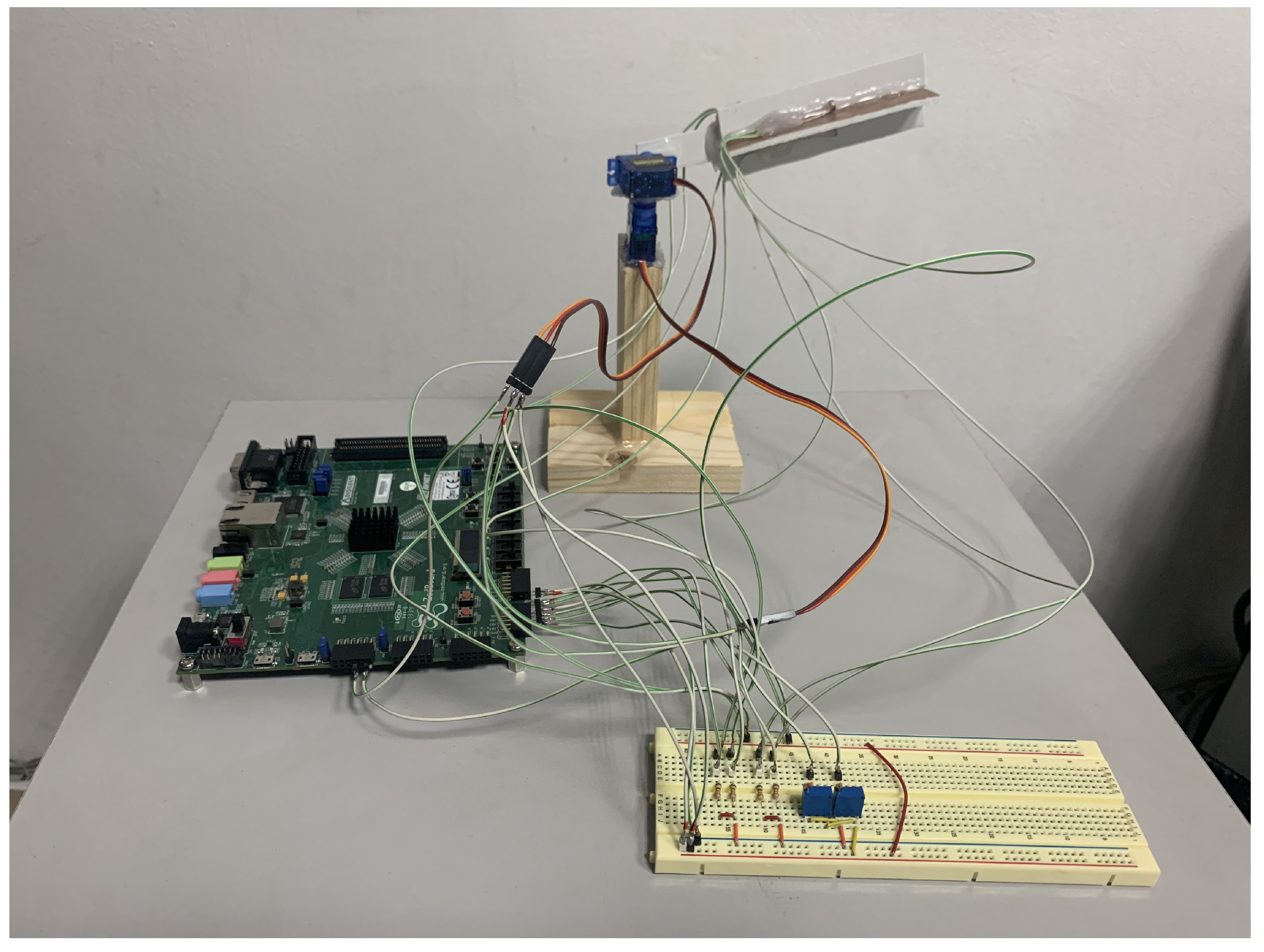
2.3. Hardware Implementation
3. Results
3.1. Experimental Results
3.2. Discussions
4. Conclusions
- The algorithm was used by the solar tracker robot to track the Sun with more precision.
- The algorithm was put in an implementable form for the computer source code.
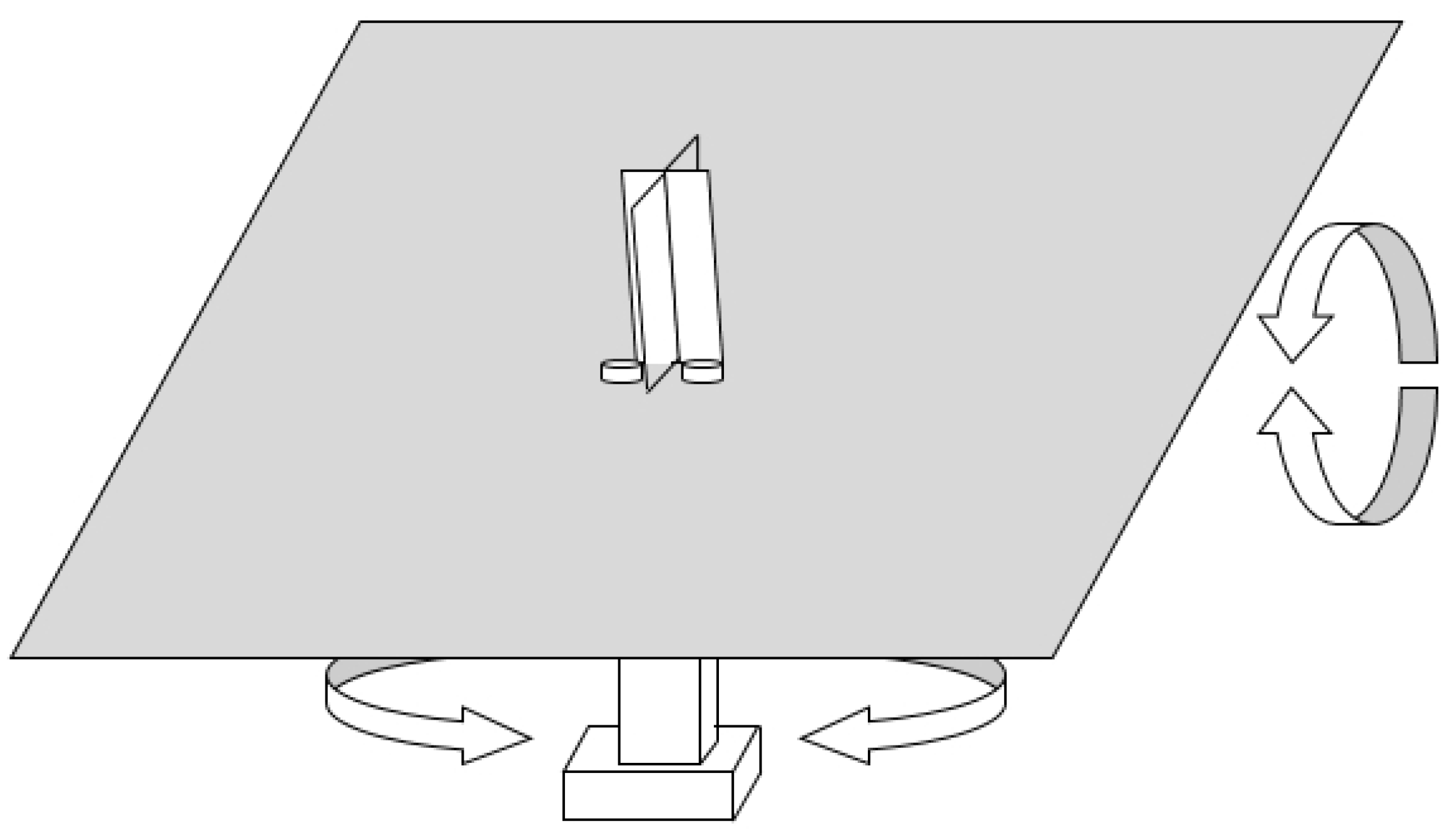
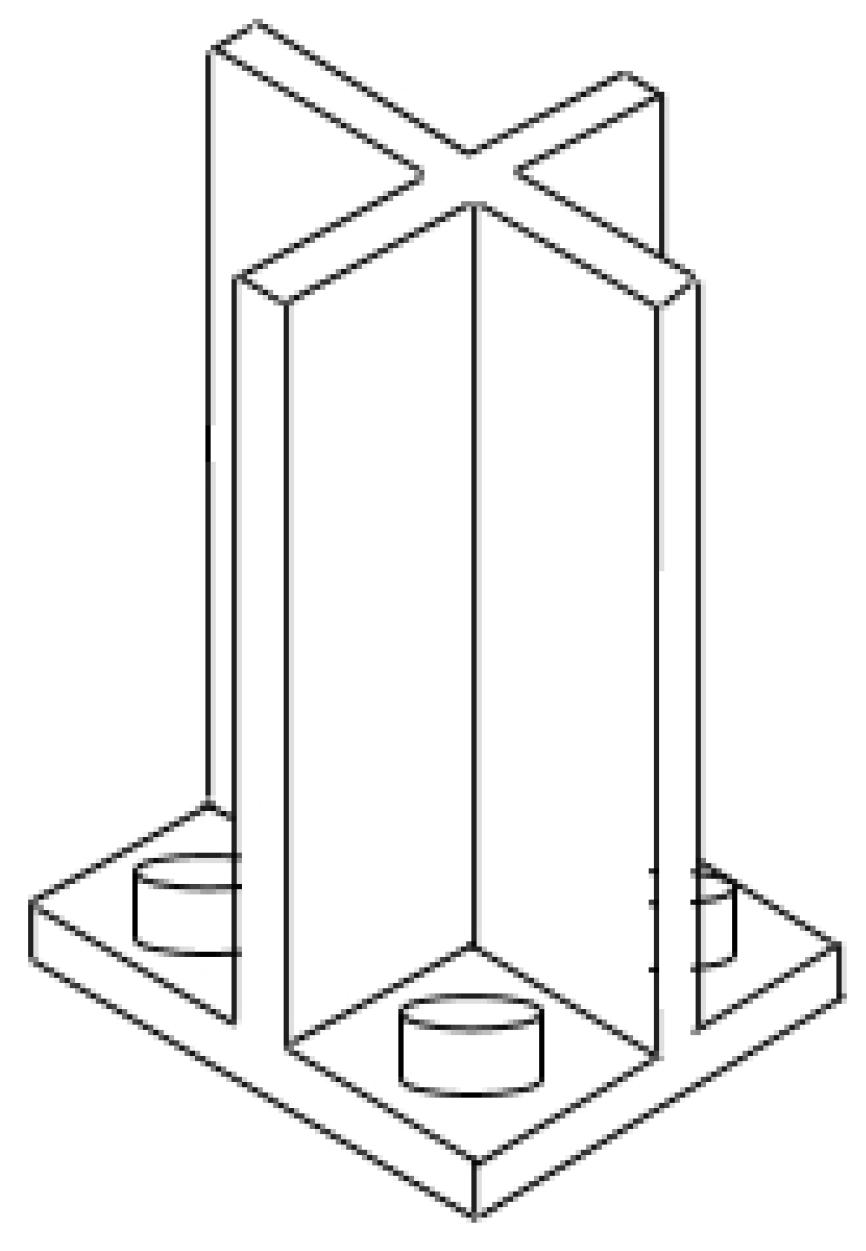
- The idea of how to glue the two motors in order for the solar tracker to be able to make horizontal and vertical movements is original.
- The genesis of all formulas was demonstrated and validated through controlled robotic movement.
- The robot was built, the circuit was made, and the software was written by the authors.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CdTe | Cadmium tellurium |
| CIGS | Copper indium gallium selenide |
| PDW | Passive dynamic walking |
| DoF | Degrees of freedom |
| 3D | Three-dimensional |
| AC | Alternating current |
| DSP | Digital signal processing |
| Coordinates | |
| MEMS | Microelectromechanical systems |
| ASCII | American Standard Code for Information Interchange |
| f | Fitness function |
| Gene (character) | |
| Target gene (character) | |
| Crossover parameter | |
| Generation number | |
| Total generation number | |
| , | Minimum, maximum |
| Random middle point | |
| Mutation rate or parameter | |
| N | Number of joints () |
| K | Total kinetic energy |
| P | Potential energy |
| Joint variable for the joint | |
| First time derivative for | |
| Generalized force (torque) at the joint | |
| Generalized joint coordinates | |
| Mass matrix or kinetic energy matrix | |
| Centrifugal and Coriolis forces | |
| Gravity force | |
| Generalized forces | |
| Inertia at joint k when joint k accelerates () | |
| Inertia observed at joint k when joint j accelerates | |
| Coefficient of the centrifugal force at joint k when joint i is moving () | |
| Coriolis force at joint k when both joints i and j are moving | |
| , | Masses |
| M | Mass matrix, all the mass |
| Linear acceleration terms | |
| Quadratic velocity terms | |
| Nonlinear configuration terms | |
| g | Gravity acceleration vector |
| Location of the center of mass for link i | |
| Place of the center point of the mass | |
| r | Place of reference |
| Differential component of the mass at point r | |
| Mass of particle i | |
| Distance to particle i | |
| DNAs | Deoxyribonucleic acids |
| Cartesian coordinate system | |
| FPGA | Field-programmable gate arrays |
| SoC | System on a chip |
| GA | Genetic algorithm |
References
- Lim, T.; Kwak, P.; Song, K.; Kim, N.; Lee, J. Automated dual-axis planar solar tracker with controllable vertical displacement for concentrating solar microcell arrays. Prog. Photovoltaics 2017, 25, 123–131. [Google Scholar] [CrossRef]
- Fathabadi, H. Comparative study between two novel sensorless and sensor based dual-axis solar trackers. Sol. Energy 2016, 138, 67–76. [Google Scholar] [CrossRef]
- Rustu, E.; Ali, S. Performance comparison of a double-axis sun tracking versus fixed PV system. Sol. Energy 2012, 86, 2665–2672. [Google Scholar]
- Lee, C.Y.; Chou, P.C.; Chiang, C.M.; Lin, C.F. Sun Tracking Systems: A Review. Sensors 2009, 9, 3875–3890. [Google Scholar] [CrossRef] [PubMed]
- Mousazadeh, H.; Keyhani, A.; Javadi, A.; Mobli, H.; Abrinia, K.; Sharifi, A. A review of principle and sun-tracking methods for maximizing solar systems output. Renew. Sustain. Energy Rev. 2009, 13, 1800–1818. [Google Scholar] [CrossRef]
- De Macedo, M.M.; Saldias, C.E.P.; Ando Junior, O.H. Mathematical Modeling of a Solar Tracker System Two Axes for Generation Photovoltaics. IEEE Lat. Am. Trans. 2016, 14, 4054–4062. [Google Scholar] [CrossRef]
- Kaur, T.; Mahajan, S.; Verma, S.; Gambhir, J. Arduino based low cost active dual axis solar tracker. In Proceedings of the ICPEICES 2016—1st International Conference on Power Electronics, Intelligent Control and Energy Systems, Delhi, India, 4–6 July 2016; pp. 1–5. [Google Scholar]
- Saumya, G.; Ankit, M.; Paurush, B. Prototype of household inverter using dual-axis solar tracker to overcome shortage of energy. In Proceedings of the InCITe 2016—International Conference on Information Technology, Noida, India, 6–7 October 2016; pp. 160–165. [Google Scholar]
- Fathabadi, H. Novel high efficient offline sensorless dual-axis solar tracker for using in photovoltaic systems and solar concentrators. Renew. Energy 2016, 95, 485–494. [Google Scholar] [CrossRef]
- Adapa, B.; Mamidi, R.P.; Alapati, S. Spacing Optimization Study of Single-axis Polar Mounted Solar-thermal Passive Tracker based Solar Photovoltaic Plan. Int. J. Renew. Energy Res. 2016, 6, 1491–1495. [Google Scholar]
- Jovanovic, V.M.; Ayala, O.; Seek, M.; Marsillac, S. Single Axis Solar Tracker Actuator Location Analysis. In Proceedings of the SoutheastCon 2016, Norfolk, VA, USA, 30 March–3 April 2016. [Google Scholar]
- Agee, J.T.; Davidson, I.E.; Kombani, L.T. Intelligent Proportional Integral Control of a Polar Axis Solar Tracker. In Proceedings of the PSC 2016—Clemson-University Power Systems Conference, Clemson, SC, USA, 8–11 March 2016. [Google Scholar]
- Geijtenbeek, T.; van de Panne, M.; van der Stappen, A.F. Flexible Muscle-Based Locomotion for Bipedal Creatures. ACM Trans. Graph. 2013, 32, 1–11. [Google Scholar] [CrossRef]
- Renan, V.; Eduardo, A.; Teo, R. Trajectory Planning For Car-like Robots Through Curve Parametrization And Genetic Algorithm Optimization With Applications To Autonomous Parking. IEEE Lat. Am. Trans. 2022, 20, 309–316. [Google Scholar]
- Loredo-Flores, A.; Gonzalez-Galvan, E.J.; Cervantes-SÁnchez, J.J.; Martinez-Soto, A. Optimization of Industrial, Vision-Based, Intuitively Generated Robot Point-Allocating Tasks Using Genetic Algorithms. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2008, 38, 600–608. [Google Scholar] [CrossRef]
- Gary, P.; Richard, Z. Learning Area Coverage for a Self-Sufficient Hexapod Robot Using a Cyclic Genetic Algorithm. IEEE Syst. J. 2014, 8, 778–790. [Google Scholar]
- Estrada, F.A.C.; Lozada, J.C.H.; Gutiérrez, J.S.; Valencia, M.I.C. Performance between Algorithm and micro Genetic Algorithm to solve the robot locomotion. IEEE Lat. Am. Trans. 2019, 17, 1244–1251. [Google Scholar] [CrossRef]
- Jamwal, P.K.; Hussain, S.; Xie, S.Q. Three-Stage Design Analysis and Multicriteria Optimization of a Parallel Ankle Rehabilitation Robot Using Genetic Algorithm. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1433–1446. [Google Scholar] [CrossRef]
- Tsai, C.C.; Huang, H.C.; Chan, C.K. Parallel Elite Genetic Algorithm and Its Application to Global Path Planning for Autonomous Robot Navigation. IEEE Trans. Ind. Electron. 2011, 58, 4813–4821. [Google Scholar] [CrossRef]
- Kamio, S.; Iba, H. Adaptation technique for integrating genetic programming and reinforcement learning for real robots. IEEE Trans. Evol. Comput. 2005, 9, 318–333. [Google Scholar] [CrossRef]
- Tewolde, G.S.; Sheng, W. Robot Path Integration in Manufacturing Processes: Genetic Algorithm Versus Ant Colony Optimization. IEEE Trans. Syst. Man Cybern.-Part A Syst. Humans 2008, 38, 278–287. [Google Scholar] [CrossRef]
- Hornby, G.S.; Takamura, S.; Yamamoto, T.; Fujita, M. Autonomous evolution of dynamic gaits with two quadruped robots. IEEE Trans. Robot. 2005, 21, 402–410. [Google Scholar] [CrossRef] [Green Version]
- Tsai, C.C.; Huang, H.C.; Lin, S.C. FPGA-Based Parallel DNA Algorithm for Optimal Configurations of an Omnidirectional Mobile Service Robot Performing Fire Extinguishment. IEEE Trans. Ind. Electron. 2011, 58, 1016–1026. [Google Scholar] [CrossRef]
- Walker, J.H.; Garrett, S.M.; Wilson, M.S. The balance between initial training and lifelong adaptation in evolving robot controllers. IEEE Trans. Syst. Man Cybern. Part B (Cybernetics) 2006, 36, 423–432. [Google Scholar] [CrossRef]
- Huang, H.C. SoPC-Based Parallel ACO Algorithm and its Application to Optimal Motion Controller Design for Intelligent Omnidirectional Mobile Robots. IEEE Trans. Ind. Informatics 2013, 9, 1828–1835. [Google Scholar] [CrossRef]
- Kamel, M.A.; Yu, X.; Zhang, Y. Real-Time Fault-Tolerant Formation Control of Multiple WMRs Based on Hybrid GA–PSO Algorithm. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1263–1276. [Google Scholar] [CrossRef]
- Gao, G.; Mei, Y.; Xin, B.; Jia, Y.H.; Browne, W.N. Automated Coordination Strategy Design Using Genetic Programming for Dynamic Multipoint Dynamic Aggregation. IEEE Trans. Cybern. 2022, 52, 13521–13535. [Google Scholar] [CrossRef]
- Ju, Z.; Ji, X.; Li, J.; Liu, H. An Integrative Framework of Human Hand Gesture Segmentation for Human–Robot Interaction. IEEE Syst. J. 2017, 11, 1326–1336. [Google Scholar] [CrossRef] [Green Version]
- Datta, R.; Pradhan, S.; Bhattacharya, B. Analysis and Design Optimization of a Robotic Gripper Using Multiobjective Genetic Algorithm. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 16–26. [Google Scholar] [CrossRef]
- Jamwal, P.K.; Hussain, S. Multicriteria Design Optimization of a Parallel Ankle Rehabilitation Robot: Fuzzy Dominated Sorting Evolutionary Algorithm Approach. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 589–597. [Google Scholar] [CrossRef]
- Yamasaki, F.; Endo, K.; Kitano, H.; Asada, M. Acquisition of humanoid walking motion using genetic algorithm-Considering characteristics of servo modules. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 3, pp. 3123–3128. [Google Scholar]
- Kong, J.S.; Lee, B.H.; Kim, J.G. A study on the gait generation of a humanoid robot using genetic algorithm. In Proceedings of the SICE 2004 Annual Conference, Sapporo, Japan, 4–6 August 2004; Volume 1, pp. 187–191. [Google Scholar]
- Endo, K.; Maeno, T.; Kitano, H. Co-evolution of morphology and walking pattern of biped humanoid robot using evolutionary computation: Designing the real robot. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 1362–1367. [Google Scholar]
- Choi, S.H.; Choi, Y.H.; Kim, J.G. Optimal walking trajectory generation for a biped robot using genetic algorithm. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No.99CH36289), Kyongju, Republic of Korea, 17–21 October 1999; Volume 3, pp. 1456–1461. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total population | 150 | Generation number | 50 |
| Crossover rate | 0.75 | Mutation rate | 0.01 |
| String length | 8bits | ||
| Fitness function | |||
| GA Parameter | Proposed Approach | F. Yamasaki et al. [31] | Jung-Shik Kong et al. [32] | K. Endo et al. [33] | Sang-Ho Choi et al. [34] |
|---|---|---|---|---|---|
| Total population | 150 | 50 | 100 | 200 | 60 |
| Generation number | 50 | 50 | 300 | 300 | 50 |
| Crossover rate | 0.75 | 0.9 | 0.08 | 0.8 | 0.92 |
| Mutation rate | 0.01 | 0.02 | 0.05 | 0.05 | 0.03 |
| String length (bits) | 8 | - | - | - | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szabo, R.; Ricman, R.-S. A Genetic Algorithm-Controlled Solar Tracker Robot with Increased Precision Due to Evolution. Machines 2023, 11, 430. https://doi.org/10.3390/machines11040430
Szabo R, Ricman R-S. A Genetic Algorithm-Controlled Solar Tracker Robot with Increased Precision Due to Evolution. Machines. 2023; 11(4):430. https://doi.org/10.3390/machines11040430
Chicago/Turabian StyleSzabo, Roland, and Radu-Stefan Ricman. 2023. "A Genetic Algorithm-Controlled Solar Tracker Robot with Increased Precision Due to Evolution" Machines 11, no. 4: 430. https://doi.org/10.3390/machines11040430