
Quasi-Coordinates-Based Closed-Form Dynamic Modeling and Analysis for a 2R1T PKM with a Rigid–Flexible Structure
 , ,
, ,
Abstract
:1. Introduction
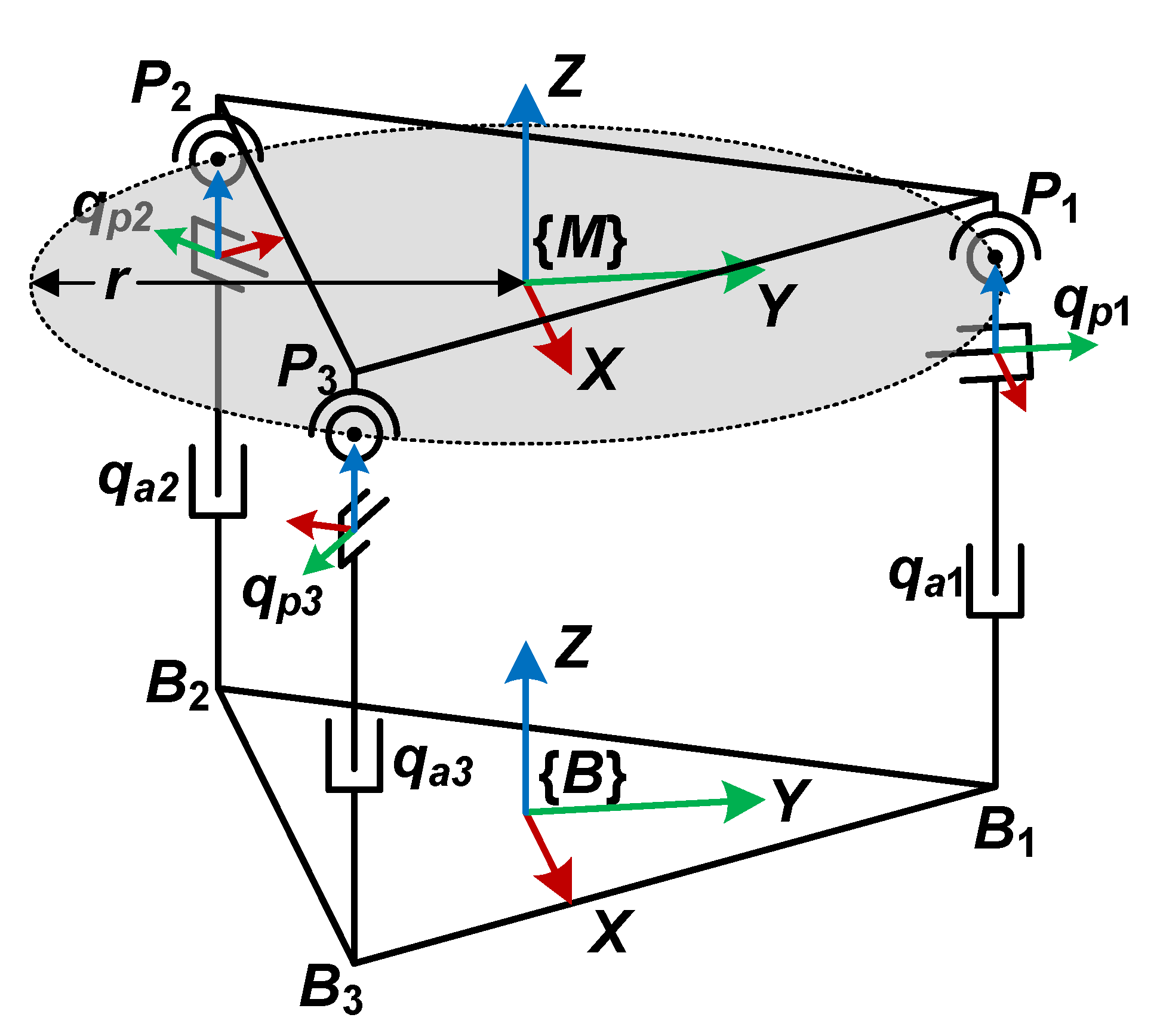
2. Kinematic Modeling of the 2R1T 3PPS PKM
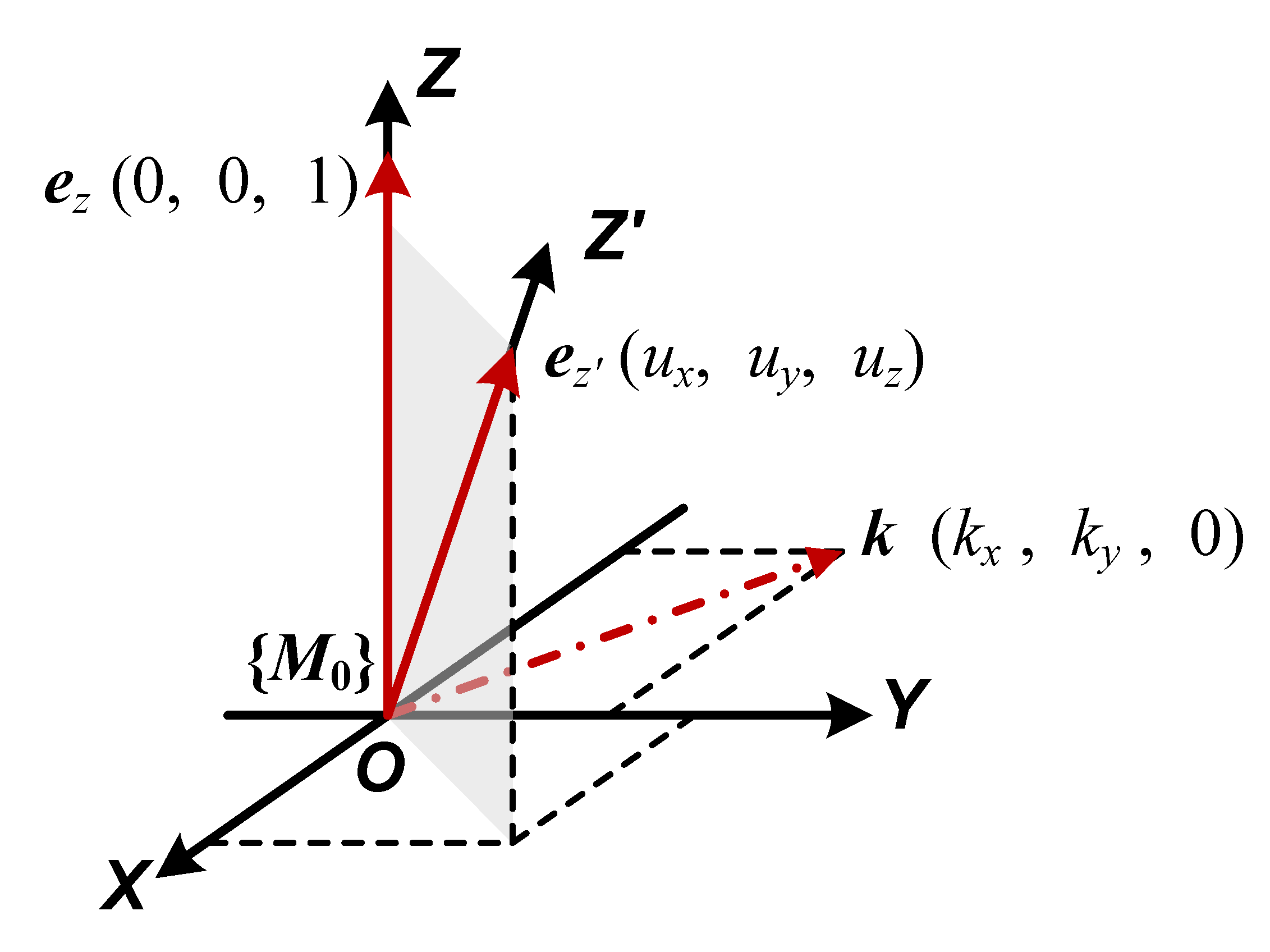
2.1. Displacement Modeling
2.2. Velocity and Acceleration Analysis
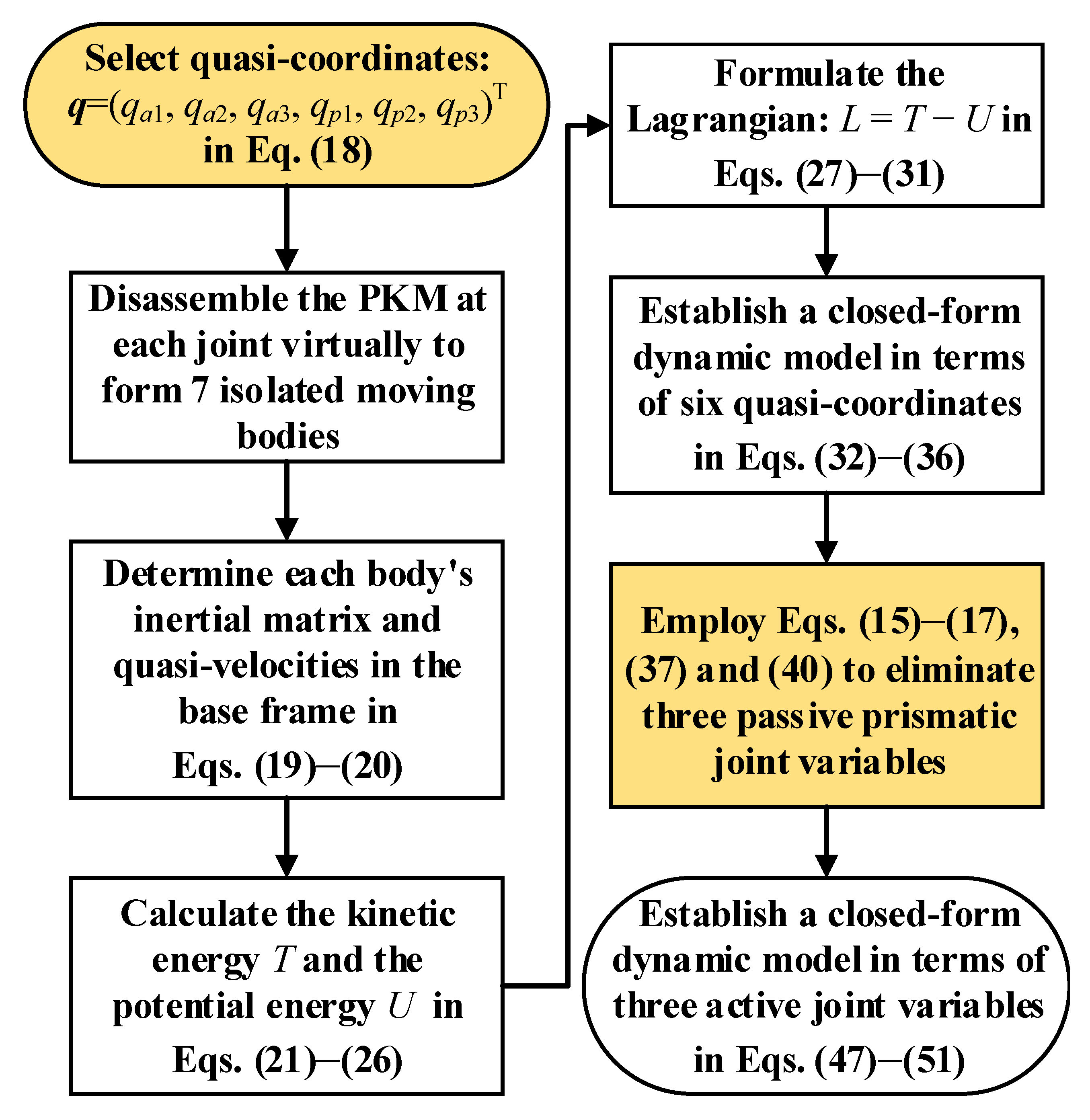
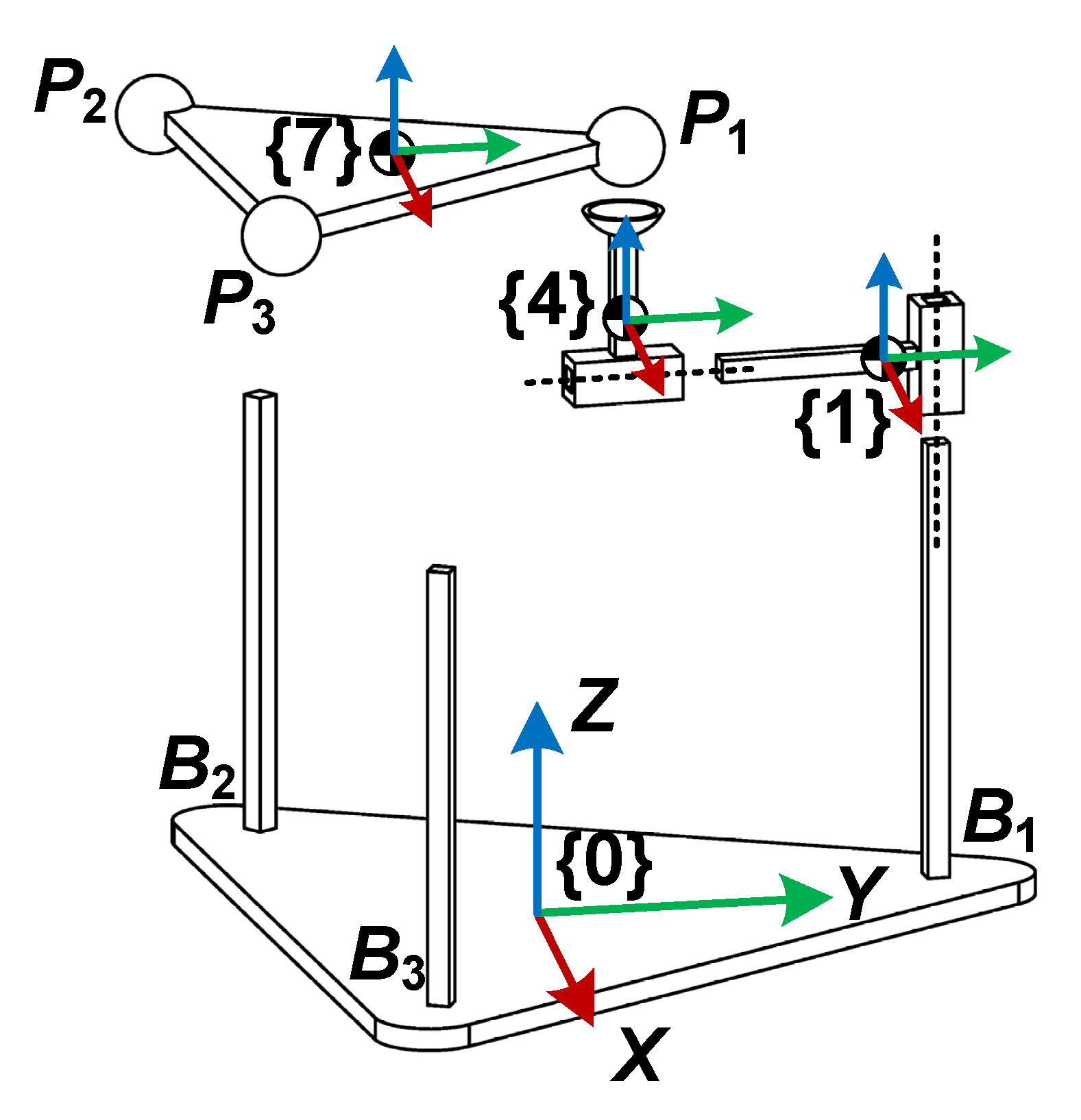
3. Dynamic Modeling of the 2R1T 3PPS PKM with a Rigid–Flexible Structure
3.1. Closed-Form Dynamic Model
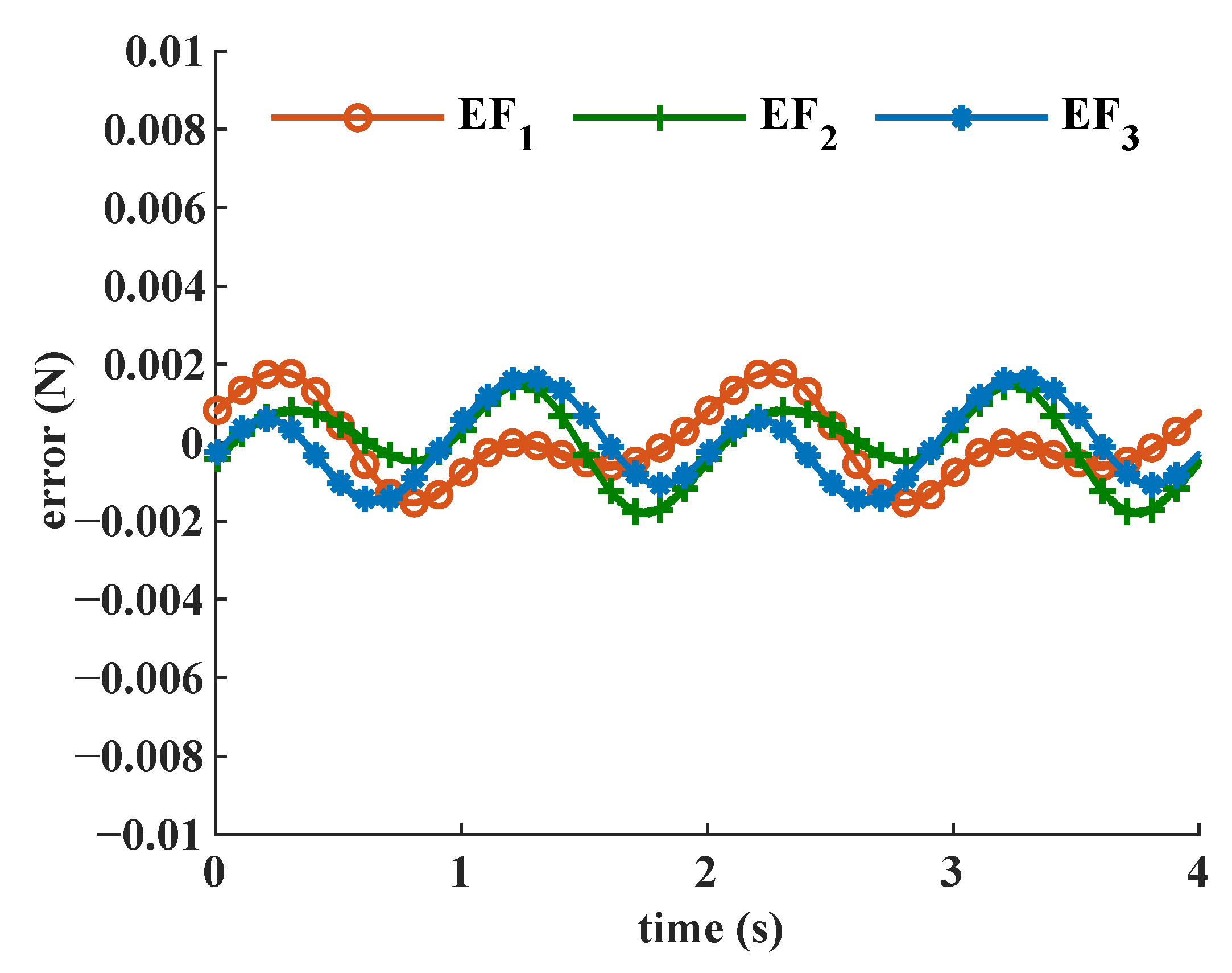
3.2. Simulation Validation
4. Coupling-Effects Analysis of the Flexure-Based Passive Prismatic Joints
4.1. Stiffness Model
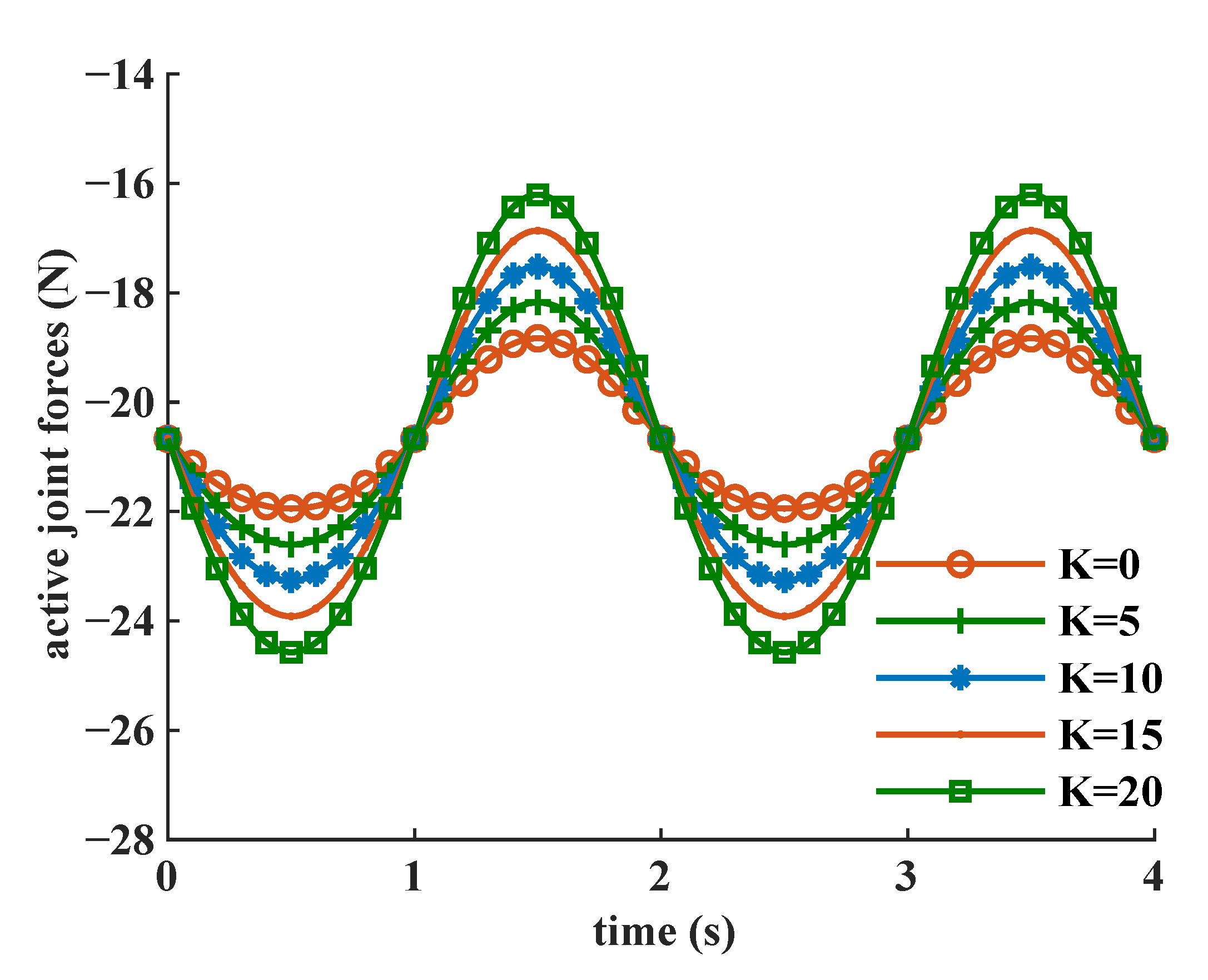
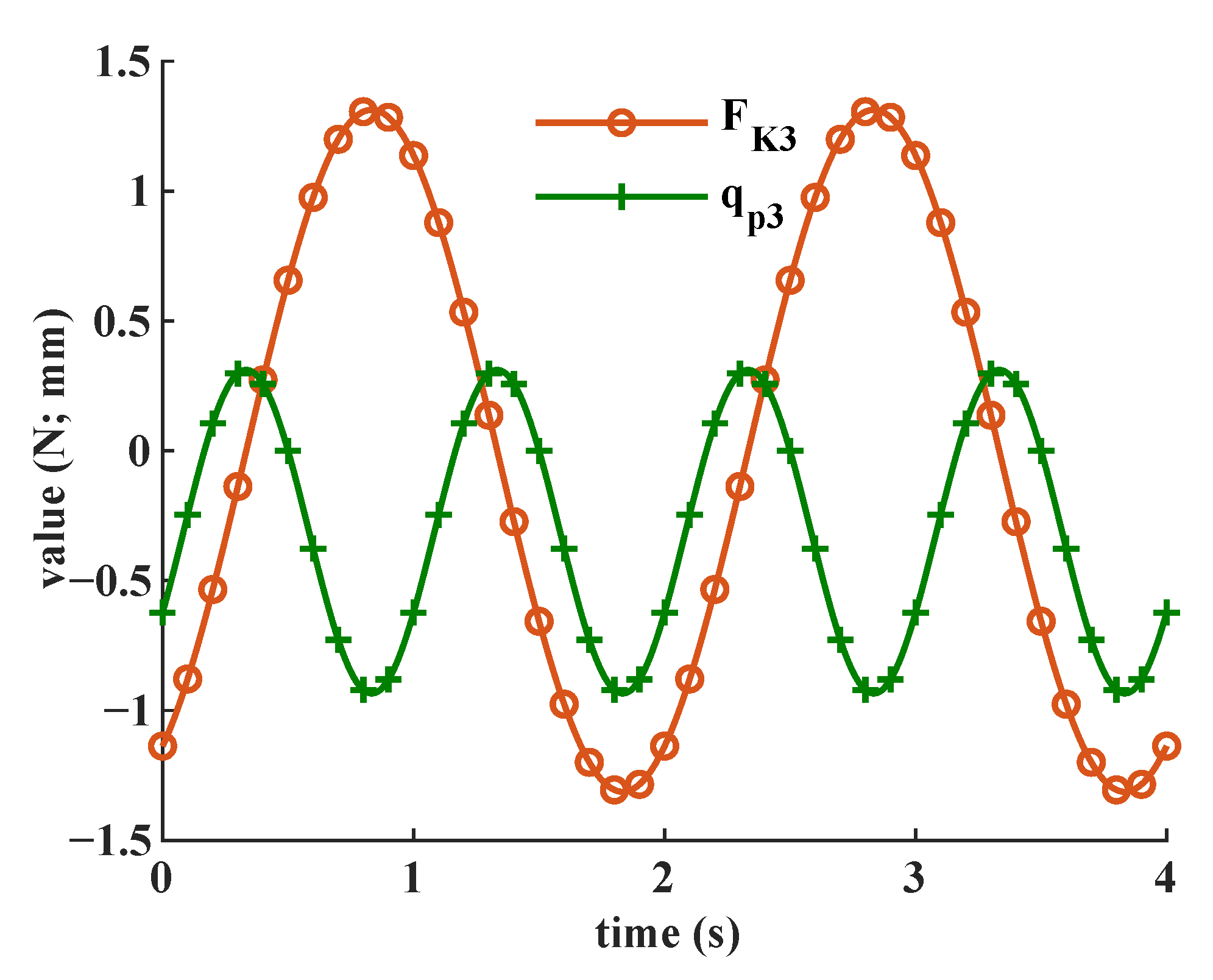
4.2. Coupling Effects on Dynamic Behavior
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PKM | Parallel kinematic mechanism |
| 3PPS | 3-legged prismatic-prismatic-spherical |
| MAE | Mean absolute error |
| 2R1T | Two rotational and one translational |
References
- Merlet, J.P. Parallel Robots; Springer Science and Business Media: Dordrecht, Netherlands, 2006; Volume 128. [Google Scholar]
- Liping, W.; Huayang, X.; Liwen, G. Kinematics and inverse dynamics analysis for a novel 3-PUU parallel mechanism. Robotica 2017, 35, 2018–2035. [Google Scholar] [CrossRef]
- Liu, X.J.; Wang, J. Parallel Kinematics; Springer Tracts in Mechanical Engineering; Springer Tracts in Mechanical Engineering: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Wang, D.; Wang, L.; Wu, J.; Ye, H. An Experimental Study on the Dynamics Calibration of a 3-DOF Parallel Tool Head. IEEE/ASME Trans. Mechatronics 2019, 24, 2931–2941. [Google Scholar] [CrossRef]
- Valles, M.; Diaz-Rodriguez, M.; Valera, A.; Mata, V.; Page, A. Mechatronic Development and Dynamic Control of a 3-DOF Parallel Manipulator. Mech. Based Des. Struct. Mech. 2012, 40, 434–452. [Google Scholar] [CrossRef]
- Oba, Y.; Yamada, Y.; Igarashi, K.; Katsura, S.; Kakinuma, Y. Replication of skilled polishing technique with serial–parallel mechanism polishing machine. Precis. Eng. 2016, 45, 292–300. [Google Scholar] [CrossRef]
- Dasgupta, B.; Choudhury, P. A general strategy based on the Newton–Euler approach for the dynamic formulation of parallel manipulators. Mech. Mach. Theory 1999, 34, 801–824. [Google Scholar] [CrossRef]
- Guo, F.; Cheng, G.; Pang, Y. Explicit dynamic modeling with joint friction and coupling analysis of a 5-DOF hybrid polishing robot. Mech. Mach. Theory 2022, 167, 104509. [Google Scholar] [CrossRef]
- Marques, F.; Roupa, I.; Silva, M.T.; Flores, P.; Lankarani, H.M. Examination and comparison of different methods to model closed loop kinematic chains using Lagrangian formulation with cut joint, clearance joint constraint and elastic joint approaches. Mech. Mach. Theory 2021, 160, 104294. [Google Scholar] [CrossRef]
- Xin, G.; Deng, H.; Zhong, G. Closed-form dynamics of a 3-DOF spatial parallel manipulator by combining the Lagrangian formulation with the virtual work principle. Nonlinear Dyn. 2016, 86, 1329–1347. [Google Scholar] [CrossRef]
- Abo-Shanab, R.F. Dynamic modeling of parallel manipulators based on Lagrange–D’Alembert formulation and Jacobian/Hessian matrices. Multibody Syst. Dyn. 2020, 48, 403–426. [Google Scholar] [CrossRef]
- Kane, T.R.; Levinson, D.A. The Use of Kane’s Dynamical Equations in Robotics. Int. J. Robot. Res. 1983, 2, 3–21. [Google Scholar] [CrossRef]
- Wang, J.T.; Huston, R.L. Kane’s Equations With Undetermined Multipliers—Application to Constrained Multibody Systems. J. Appl. Mech. 1987, 54, 424–429. [Google Scholar] [CrossRef]
- Tsai, L.W. Solving the Inverse Dynamics of a Stewart-Gough Manipulator by the Principle of Virtual Work. J. Mech. Des. 1999, 122, 3–9. [Google Scholar] [CrossRef]
- Kalani, H.; Rezaei, A.; Akbarzadeh, A. Improved general solution for the dynamic modeling of Gough–Stewart platform based on principle of virtual work. Nonlinear Dyn. 2016, 83, 2393–2418. [Google Scholar] [CrossRef]
- Lu, S.; Ding, B.; Li, Y. Minimum-jerk trajectory planning pertaining to a translational 3-degree-of-freedom parallel manipulator through piecewise quintic polynomials interpolation. Adv. Mech. Eng. 2020, 12, 1–18. [Google Scholar] [CrossRef]
- Sandor, G.N.; Zhuang, X. A linearized lumped parameter approach to vibration and stress analysis of elastic linkages. Mech. Mach. Theory 1985, 20, 427–437. [Google Scholar] [CrossRef]
- Liang, D.; Song, Y.; Sun, T.; Jin, X. Rigid–flexible coupling dynamic modeling and investigation of a redundantly actuated parallel manipulator with multiple actuation modes. J. Sound Vib. 2017, 403, 129–151. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, H.; Zhang, M.; Li, B.; Liu, Q.; Dong, C. Elasto-dynamic performance evaluation of a 6-DOF hybrid polishing robot based on kinematic modeling and CAE technology. Mech. Mach. Theory 2022, 176, 104983. [Google Scholar] [CrossRef]
- Zheng, K.M.; Hu, Y.M.; Yu, W.Y. A novel parallel recursive dynamics modeling method for robot with flexible bar-groups. Appl. Math. Model. 2020, 77, 267–288. [Google Scholar] [CrossRef]
- Liao, S.; Ding, B.; Li, Y. Design, Assembly, and Simulation of Flexure-Based Modular Micro-Positioning Stages. Machines 2022, 10, 421. [Google Scholar] [CrossRef]
- Yang, C.; Li, Q.C.; Chen, Q.H. Natural frequency analysis of parallel manipulators using global independent generalized displacement coordinates. Mech. Mach. Theory 2021, 156, 104145. [Google Scholar] [CrossRef]
- Xiao, L.J.; Yan, F.P.; Chen, T.X.; Zhang, S.S.; Jiang, S. Study on nonlinear dynamics of rigid-flexible coupling multi-link mechanism considering various kinds of clearances. Nonlinear Dyn. 2022, 111, 3279–3306. [Google Scholar] [CrossRef]
- Zhang, Z.Q.; Wang, L.; Liao, J.N.; Zhao, J.; Yang, Q. Rigid-flexible coupling dynamic modeling and performance analysis of a bioinspired jumping robot with a six-bar leg mechanism. J. Mech. Sci. Technol. 2021, 35, 3675–3691. [Google Scholar] [CrossRef]
- Beiranvand, A.; Kalhor, A.; Masouleh, M.T. Modeling, identification and minimum length integral sliding mode control of a 3-DOF cartesian parallel robot by considering virtual flexible links. Mech. Mach. Theory 2021, 157, 104183. [Google Scholar] [CrossRef]
- Liang, D.; Song, Y.; Sun, T.; Jin, X. Dynamic modeling and hierarchical compound control of a novel 2-DOF flexible parallel manipulator with multiple actuation modes. Mech. Syst. Signal Process. 2018, 103, 413–439. [Google Scholar] [CrossRef]
- Guo, F.; Cheng, G.; Wang, S.; Li, J. Rigid–flexible coupling dynamics analysis with joint clearance for a 5-DOF hybrid polishing robot. Robotica 2022, 40, 2168–2188. [Google Scholar] [CrossRef]
- Teo, T.J.; Yang, G.; Chen, I.M. A large deflection and high payload flexure-based parallel manipulator for UV nanoimprint lithography: Part I. Modeling and analyses. Precis. Eng. 2014, 38, 861–871. [Google Scholar] [CrossRef]
- Teo, T.J.; Chen, I.M.; Yang, G. A large deflection and high payload flexure-based parallel manipulator for UV nanoimprint lithography: Part II. Stiffness modeling and performance evaluation. Precis. Eng. 2014, 38, 872–884. [Google Scholar] [CrossRef]
- Yang, G.; Zhu, R.; Fang, Z.; Chen, C.; Zhang, C. Kinematic Design of a 2R1T Robotic End-Effector with Flexure Joints. IEEE Access 2020, 8, 57204–57213. [Google Scholar] [CrossRef]
- Zhu, R.; Yang, G.; Fang, Z.; Dai, J.; Chen, C.Y.; Zhang, G.; Zhang, C. Hybrid orientation/force control for robotic polishing with a 2R1T force-controlled end-effector. Int. J. Adv. Manuf. Technol. 2022, 121, 2279–2290. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 4th ed.; Pearson: London, UK, 2018. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Acceleration of gravity g | 9.80665 | |
| Mass of active joints | 1264.25865111 | g |
| Mass of passive joints | 140.13865914 | g |
| Mass of moving platform | 2066.84394668 | g |
| Moment of inertia | ||
| Moment of inertia | ||
| Moment of inertia | ||
| Moment of inertia | ||
| Moment of inertia | ||
| Moment of inertia | ||
| Local coordinates of body 7 COM | ||
| Circumcircle radius r | 64 | |
| Initial distance | 183.5 | |
| Flexure stiffness | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, R.; Yang, G.; Fang, Z.; Chen, C.-Y.; Li, H.; Zhang, C. Quasi-Coordinates-Based Closed-Form Dynamic Modeling and Analysis for a 2R1T PKM with a Rigid–Flexible Structure. Machines 2023, 11, 260. https://doi.org/10.3390/machines11020260
Zhu R, Yang G, Fang Z, Chen C-Y, Li H, Zhang C. Quasi-Coordinates-Based Closed-Form Dynamic Modeling and Analysis for a 2R1T PKM with a Rigid–Flexible Structure. Machines. 2023; 11(2):260. https://doi.org/10.3390/machines11020260
Chicago/Turabian StyleZhu, Renfeng, Guilin Yang, Zaojun Fang, Chin-Yin Chen, Huamin Li, and Chi Zhang. 2023. "Quasi-Coordinates-Based Closed-Form Dynamic Modeling and Analysis for a 2R1T PKM with a Rigid–Flexible Structure" Machines 11, no. 2: 260. https://doi.org/10.3390/machines11020260