
Tribodynamic Modelling of High-Speed Rolling Element Bearings in Flexible Multi-Body Environments
 ,
, 
Abstract
:1. Introduction
2. Methodology
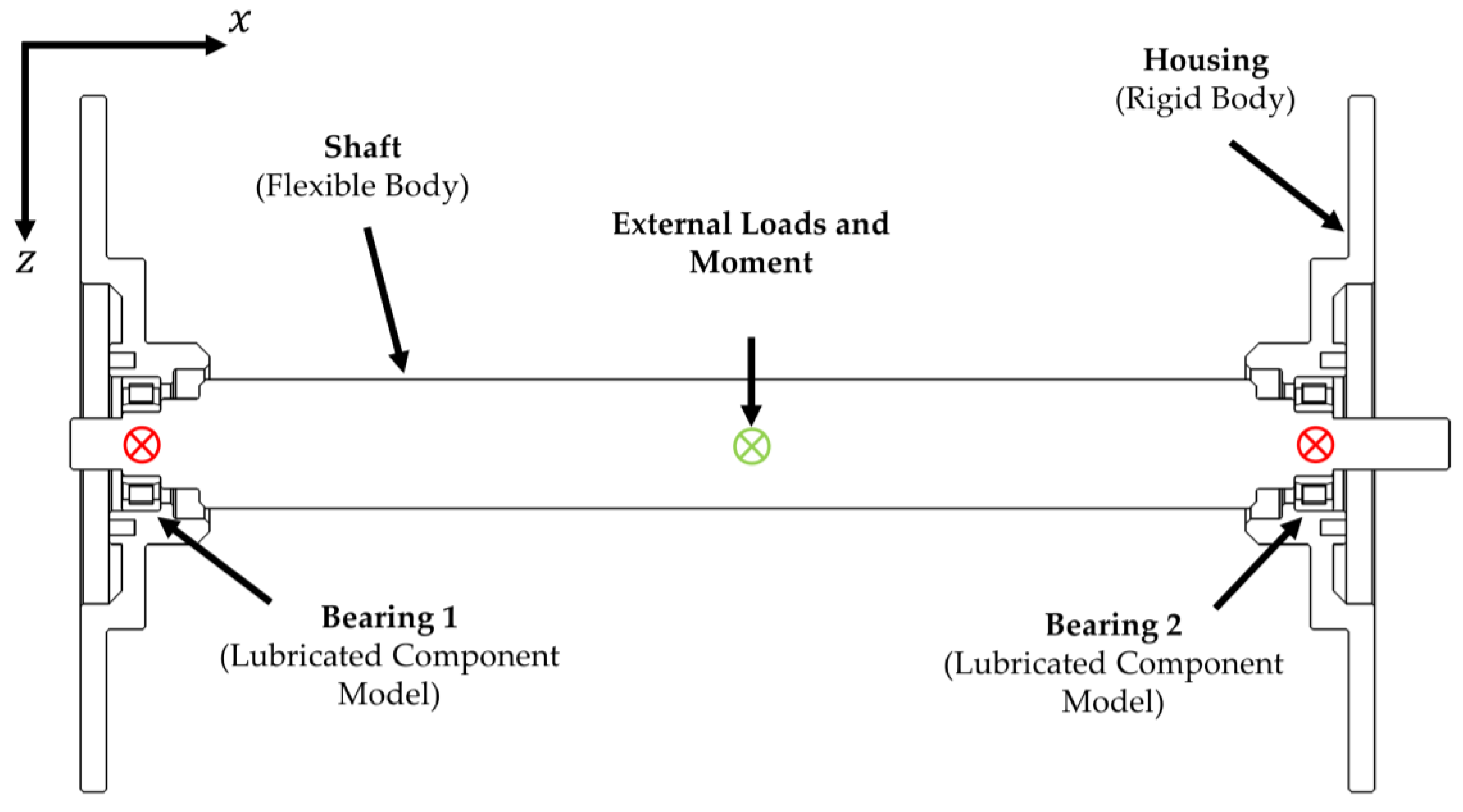
2.1. System Level Flexible Model
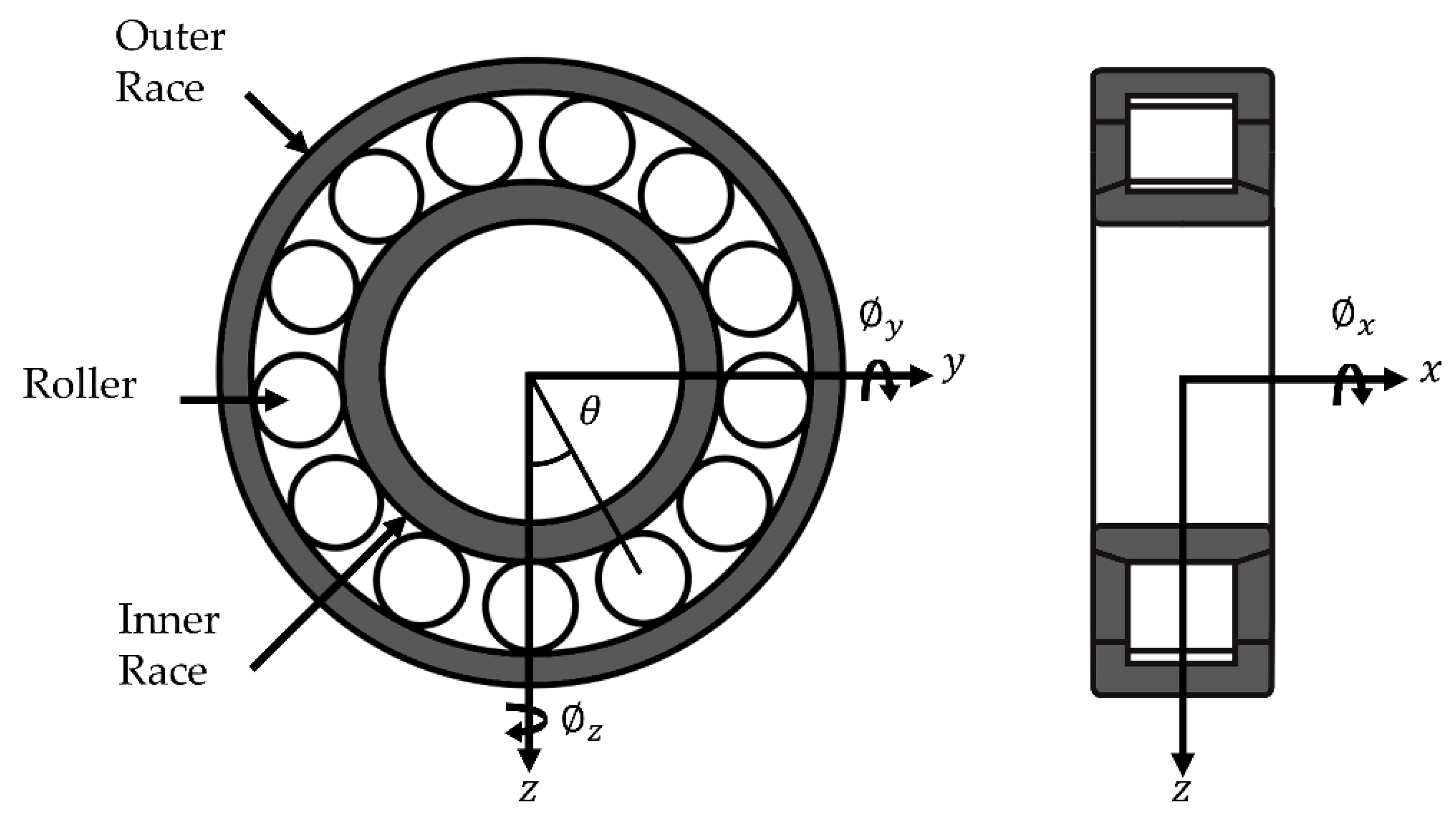
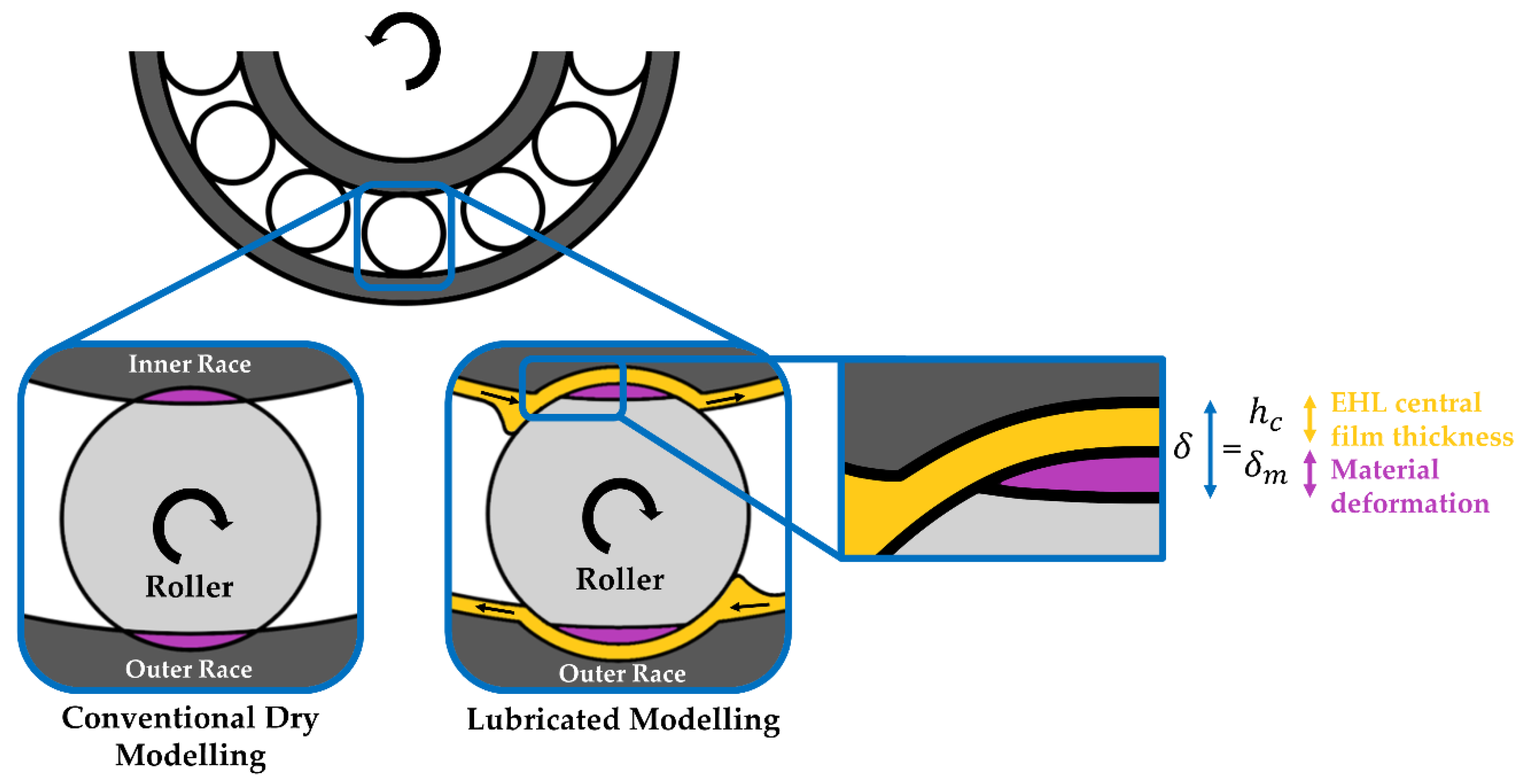
2.2. Lubricated Component Level Model
2.3. Representative Excitation Methodology
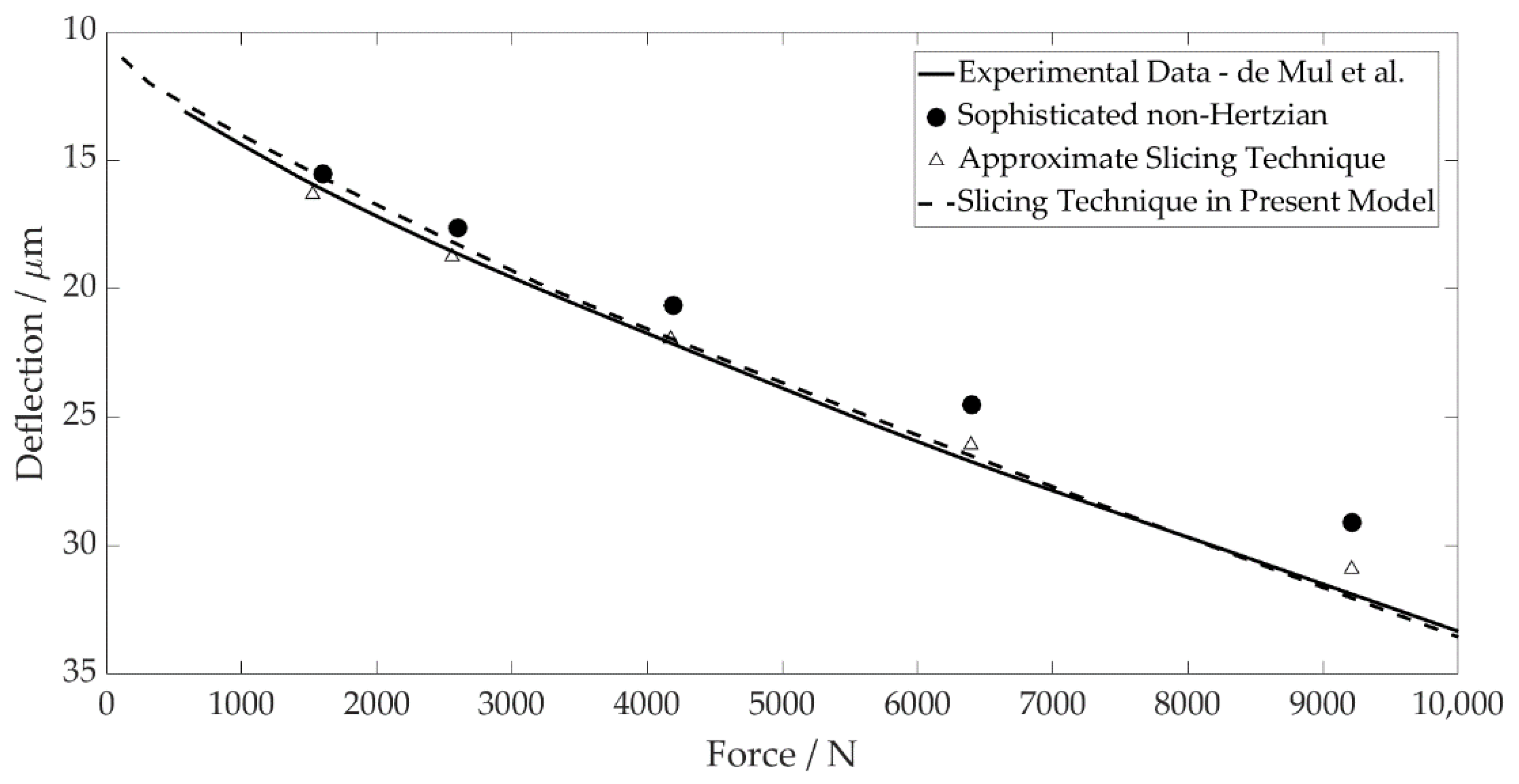
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Radial clearance (m) | |
| Body material damping (N·s·m−1) | |
| Elastic modulus (Pa) | |
| Equivalent (reduced) elastic modulus (Pa) | |
| Damping force (N) | |
| Damping factor (-) | |
| Force vector (N) | |
| Moment vector (N·m) | |
| Force on partial mass (N) | |
| External loads (N) | |
| Non-linear excitation force (N) | |
| Dimensionless equivalent geometry (-) | |
| Central film thickness (m) | |
| Inertia tensor of partial mass (kg·m2) | |
| Body stiffness matrix (N·m−1) | |
| Body material stiffness (N·m−1) | |
| Contact stiffness (N·m−1) | |
| Total Bearing Stiffness (N·m−1) | |
| EHL Film Stiffness (N·m−1) | |
| Active length of roller (m) | |
| Length of roller slice (m) | |
| Mass of partial mass (kg) | |
| Mass matrix of body (kg) | |
| Partial mass number (-) | |
| Degree of freedom (-) | |
| Non-linear inertia terms (kg·m2) | |
| Displacement (m) | |
| Velocity (m·s−1) | |
| Acceleration (m·s−2) | |
| Bearing inner race radius (m) | |
| Roller radius (m) | |
| Equivalent radius of contact (m) | |
| Slice number (-) | |
| Total contact moment (N·m) | |
| Translational displacement of partial mass (m) | |
| Dimensionless speed parameter (-) | |
| Total contact load (N) | |
| Force per unit length (N·m−1) | |
| Displacement in x-direction (m) | |
| Conjunction x-coordinate (-) | |
| Displacement in y-direction (m) | |
| Conjunction y-coordinate (-) | |
| Displacement in z-direction (m) | |
| Greek Symbols | |
| Roller angular displacement (rad) | |
| Rotational displacement of partial mass (rad) | |
| Pressure viscosity coefficient (m2·N−1) | |
| Contact deformation (m) | |
| Material deformation (m) | |
| Atmospheric lubricant dynamic viscosity (Pa·s) | |
| Lubricant inlet density (kg·m−3) | |
| Angular velocity of shaft (rad) | |
References
- Cai, W.; Wu, X.; Zhou, M.; Liang, Y.; Wang, Y. Review and Development of Electric Motor Systems and Electric Powertrains for New Energy Vehicles. Automot. Innov. 2021, 4, 3–22. [Google Scholar] [CrossRef]
- Stribeck, R. Ball Bearings for Various Loads. Trans. ASME 1907, 29, 420–463. [Google Scholar]
- Palmgren, A. Ball and Roller Bearing Engineering; KF Industries Inc.: Philadelphia, PA, USA, 1959. [Google Scholar]
- Jones, A.B. A general theory for elastically constrained ball and radial roller bearings under arbitrary load and speed conditions. J. Basic Eng. 1960, 82, 309–320. [Google Scholar] [CrossRef]
- Harris, T.A. Roller Bearing Analysis, 3rd ed.; John Wiley and Sons: New York, NY, USA, 1984. [Google Scholar]
- Andréason, S. Load distribution in a taper roller bearing arrangement considering misalignment. Tribology 1973, 6, 84–92. [Google Scholar] [CrossRef]
- Liu, J.Y. Analysis of Tapered Roller Bearings Considering High Speed and Combined Loading. J. Lubr. Technol. 1976, 98, 564–572. [Google Scholar] [CrossRef]
- De Mul, J.M.; Vree, J.M.; Maas, D.A. Equilibrium and Associated Load Distribution in Ball and Roller Bearings Loaded in Five Degrees of Freedom While Neglecting Friction—Part I: General Theory and Application to Ball Bearings. J. Tribol. 1989, 111, 142–148. [Google Scholar] [CrossRef]
- Walters, C.T. The dynamics of ball bearings. J. Lubr. Technol. 1971, 93, 1–10. [Google Scholar] [CrossRef]
- Meyer, L.D.; Ahlgren, F.F.; Weichbrodt, B. An Analytic Model for Ball Bearing Vibrations to Predict Vibration Response to Distributed Defects. J. Mech. Des. 1980, 102, 205–210. [Google Scholar] [CrossRef]
- Sunnersjö, C. Varying compliance vibrations of rolling bearings. J. Sound Vib. 1978, 58, 363–373. [Google Scholar] [CrossRef]
- Matsubara, M.; Rahnejat, H.; Gohar, R. Computational modelling of precision spindles supported by ball bearings. Int. J. Mach. Tools Manuf. 1988, 28, 429–442. [Google Scholar] [CrossRef]
- Rahnejat, H.; Rothberg, S. Mulit-Body Dynamics: Monitoring and Simulation Techniques III, 1st ed.; Wiley: New York, NY, USA, 2004. [Google Scholar]
- Gupta, P.K. Dynamics of Rolling-Element Bearings—Part I: Cylindrical Roller Bearing Analysis. J. Lubr. Technol. 1979, 101, 293–302. [Google Scholar] [CrossRef]
- Questa, H.; Mohammadpour, M.; Theodossiades, S.; Garner, C.; Bewsher, S.; Offner, G. Tribo-dynamic analysis of high-speed roller bearings for electrified vehicle powertrains. Tribol. Int. 2020, 154, 106675. [Google Scholar] [CrossRef]
- Stone, B. The State of the Art in the Measurement of the Stiffness and Damping of Rolling Element Bearings. CIRP Ann. 1982, 31, 529–538. [Google Scholar] [CrossRef]
- Dietl, P. Damping and Stiffness Characteristics of Rolling Element Bearings-Theory and Experiment; TU Vienna: Vienna, Austria, 1997. [Google Scholar]
- Bizarre, L.; Nonato, F.; Cavalca, K. Formulation of five degrees of freedom ball bearing model accounting for the nonlinear stiffness and damping of elastohydrodynamic point contacts. Mech. Mach. Theory 2018, 124, 179–196. [Google Scholar] [CrossRef]
- Rahnejat, H.; Gohar, R. The Vibrations of Radial ball bearings. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 1985, 199, 181–193. [Google Scholar] [CrossRef] [Green Version]
- Aini, R.; Rahnejat, H.; Gohar, R. Vibration modeling of rotating spindles supported by lubricated bearings. J. Tribol. 2000, 124, 158–165. [Google Scholar] [CrossRef]
- Mohammadpour, M.; Johns-Rahnejat, P.; Rahnejat, H. Roller bearing dynamics under transient thermal-mixed non-Newtonian elastohydrodynamic regime of lubrication. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2015, 229, 407–423. [Google Scholar] [CrossRef] [Green Version]
- Sopanen, J.; Mikkola, A. Dynamic model of a deep-groove ball bearing including localized and distributed defects. Part 1: Theory. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2003, 217, 201–211. [Google Scholar] [CrossRef]
- Sopanen, J.; Mikkola, A. Dynamic model of a deep-groove ball bearing including localized and distributed defects. Part 2: Implementation and results. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2003, 217, 213–223. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R. Simulating gear and bearing interactions in the presence of faults. Part I. The combined gear bearing dynamic model and the simulation of localised bearing faults. Mech. Syst. Signal Process. 2008, 22, 1924–1951. [Google Scholar] [CrossRef]
- Liu, J.; Shao, Y. Vibration modelling of nonuniform surface waviness in a lubricated roller bearing. J. Vib. Control 2016, 23, 1115–1132. [Google Scholar] [CrossRef]
- Nonato, F.; Cavalca, K.L. An approach for including the stiffness and damping of elastohydrodynamic point contacts in deep groove ball bearing equilibrium models. J. Sound Vib. 2014, 333, 6960–6978. [Google Scholar] [CrossRef]
- Lundberg, G.; Yhland, E. Cylinder Compressed between Two Plane Bodies; SKF: Gothenburg, Sweden, 1949. [Google Scholar]
- De Mul, J.M.; Vree, J.M.; Maas, D.A. Equilibrium and Associated Load Distribution in Ball and Roller Bearings Loaded in Five Degrees of Freedom While Neglecting Friction—Part II: Application to Roller Bearings and Experimental Verification. J. Tribol. 1989, 111, 149–155. [Google Scholar] [CrossRef]
- Parikyan, T.; Resch, T.; Priebsch, H.H. Structured Model of Crankshaft in the Simulation of Engine Dynamics with AVL/EXCITE. In Volume 3: Engine Systems: Lubrication, Components, Exhaust and Boosting, System Design and Simulation; American Society of Mechanical Engineers: New York, NY, USA, 2001; Volume 67, pp. 105–114. [Google Scholar] [CrossRef]
- Offner, G. Modelling of condensed flexible bodies considering non-linear inertia effects resulting from gross motions. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2011, 225, 204–219. [Google Scholar] [CrossRef]
- Walford, T.L.H.; Stone, B.J. The Sources of Damping in Rolling Element Bearings under Oscillating Conditions. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 1983, 197, 225–232. [Google Scholar] [CrossRef]
- Dareing, D.W.; Johnson, K.L. Fluid Film Damping of Rolling Contact Vibrations. J. Mech. Eng. Sci. 1975, 17, 214–218. [Google Scholar] [CrossRef]
- Mehdigoli, H.; Rahnejat, H.; Gohar, R. Vibration response of wavy surfaced disc in elastohydrodynamic rolling contact. Wear 1990, 139, 1–15. [Google Scholar] [CrossRef]
- Dowson, D.; Toyoda, S. A Central Film Thickness Formula for Elastohydrodynamic Line. In Proc. Fifth Leeds-Lyon Symp. Tribol. Mech. Eng. Publ.; Elsevier: Amsterdam, The Netherlands, 1979; pp. 60–65. [Google Scholar]
- Nelias, D.; Bercea, I.; Paleu, V. Prediction of roller skewing in tapered roller bearings. Tribol. Trans. 2008, 51, 128–139. [Google Scholar] [CrossRef]
- Majdoub, F.; Saunier, L.; Sidoroff-Coicaud, C.; Mevel, B. Experimental and numerical roller skew in tapered roller bearings. Tribol. Int. 2020, 145, 106142. [Google Scholar] [CrossRef]
- Mevel, B.; Guyader, J. Routes to chaos in ball bearings. J. Sound Vib. 1993, 162, 471–487. [Google Scholar] [CrossRef]
- Spikes, H. Basics of EHL for practical application. Lubr. Sci. 2014, 27, 45–67. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.; Wang, L. TEHL analysis of high-speed and heavy-load roller bearing with quasi-dynamic characteristics. Chin. J. Aeronaut. 2015, 28, 1296–1304. [Google Scholar] [CrossRef] [Green Version]
- Singh, K.P.; Paul, B. Numerical Solution of Non-Hertzian Elastic Contact Problems. J. Appl. Mech. 1974, 41, 484–490. [Google Scholar] [CrossRef]
- Harris, T.A.; Kotzales, M.N. Advanced Concepts of Bearing Technology, 5th ed.; Taylor and Francis Group: Boca Raton, FL, USA, 2007. [Google Scholar]
- De Mul, J.M.; Kalker, J.J.; Fredriksson, B. The contact between arbitrarily curved bodies of finite dimensions. J. Tribol. 1986, 108, 140–148. [Google Scholar] [CrossRef]
- Mitsuya, Y.; Sawai, H.; Shimizu, M.; Aono, Y. Damping in Vibration Transfer through Deep-Groove Ball Bearings. Trans. Jpn. Soc. Mech. Eng. Ser. C 1992, 58, 3714–3721. [Google Scholar] [CrossRef]
- Krämer, E. Dynamics of Rotors and Foundations; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Inner race bore diameter | 25 mm |
| Pitch diameter | 60 mm |
| Roller diameter | 8.8 mm |
| Roller length | 15 mm |
| Number of rollers | 17 |
| Radial interference | 2 µm |
| Parameter | Value |
|---|---|
| Pressure viscosity coefficient () | 2.1 10−8 Pa−1 |
| Atmospheric lubricant dynamic viscosity () | 0.08 Pa·s |
| Lubricant inlet density () | 833.8 kg·m−3 |
| Modulus of elasticity of contacting solids () | 210 GPa |
| Poisson’s ratio of contacting solids () | 0.3 |
| Parameter | Value |
|---|---|
| Number of teeth | 17 |
| Normal module | 0.004 m |
| Normal pressure angle | 20° |
| Helix angle at pitch circle | 0° |
| Active tip diameter | 0.076 m |
| Active root diameter | 0.065 m |
| Width | 0.035 m |
| Parameter | Value |
|---|---|
| Number of teeth | 51 |
| Normal module | 0.004 m |
| Normal pressure angle | 20° |
| Helix angle at pitch circle | 0° |
| Active tip diameter | 0.212 m |
| Active root diameter | 0.202 m |
| Width | 0.030 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Questa, H.; Mohammadpour, M.; Theodossiades, S.; Garner, C.P.; Bewsher, S.R.; Offner, G. Tribodynamic Modelling of High-Speed Rolling Element Bearings in Flexible Multi-Body Environments. Machines 2023, 11, 93. https://doi.org/10.3390/machines11010093
Questa H, Mohammadpour M, Theodossiades S, Garner CP, Bewsher SR, Offner G. Tribodynamic Modelling of High-Speed Rolling Element Bearings in Flexible Multi-Body Environments. Machines. 2023; 11(1):93. https://doi.org/10.3390/machines11010093
Chicago/Turabian StyleQuesta, Harry, Mahdi Mohammadpour, Stephanos Theodossiades, Colin P. Garner, Stephen R. Bewsher, and Günter Offner. 2023. "Tribodynamic Modelling of High-Speed Rolling Element Bearings in Flexible Multi-Body Environments" Machines 11, no. 1: 93. https://doi.org/10.3390/machines11010093