
Stress and Corrosion Defect Identification in Weak Magnetic Leakage Signals Using Multi-Graph Splitting and Fusion Graph Convolution Networks

Abstract
:1. Introduction
- A multi-graph splitting and fusion of detail graphs and the root graph are proposed to change the deficiency that graph convolutional networks cannot cope with both detail and structure information. The root graph can capture the structure relationship of the WMFLs detection information. The detail graphs can capture the detailed features of the WMFLs detection information. By using the fusion of multiple root graph and detail graphs, the method proposed in this paper can analyze both the structure and detailed features of the detection information.
- Compared with the typical GCNs method, the multi-graph splitting and fusion GCNs method can transform more detection details by splitting and more overall information by fusion. Although multi-graph splitting and fusion GCNs have the limitation of increasing training costs, the method uses larger-scale spatial information for analysis and to some extent extracts information from smaller-scale information re-fusion methods.
- We used two experiments to verify the effectiveness of our proposed method. First, this paper compares the detection results of multi-graph splitting and fusion GCNs and typical GCNs. Secondly, this paper compares traditional machine learning methods based on expert experience and feature engineering with our proposed method. The results show that the multi-graph splitting and fusion graph GCNs method is better than the typical GCNs method. Meanwhile, compared with traditional machine learning methods, multi-graph splitting and fusion GCNs can identify defects better.
2. Principle of WMFLs Testing
3. Architecture of the Proposed Model
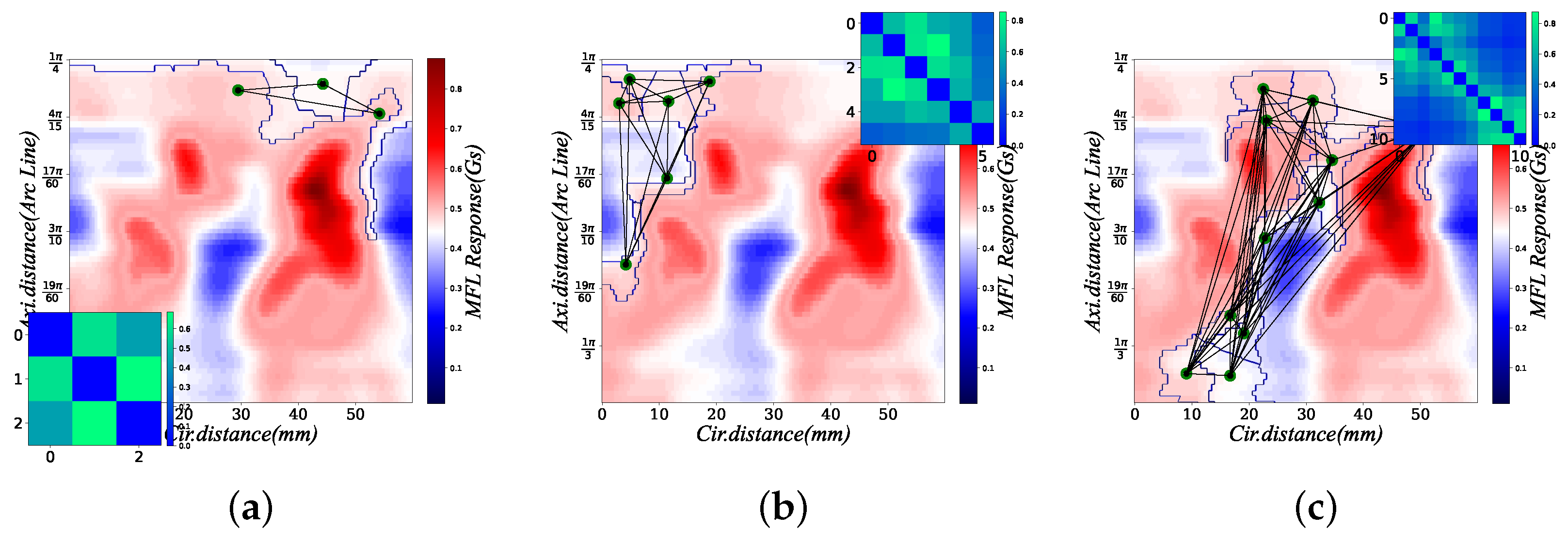
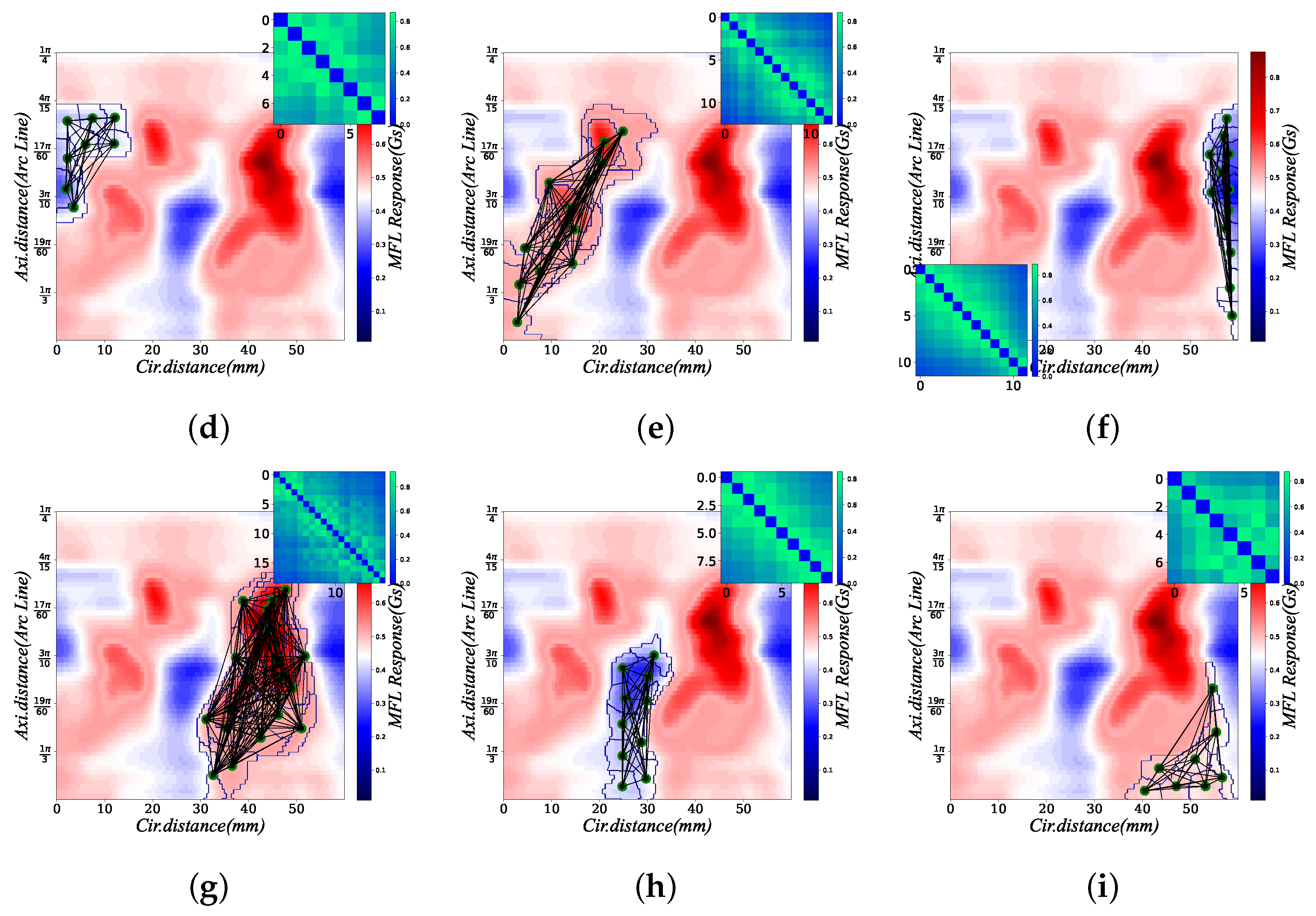
3.1. First Split, Re-Split and Graph Fusion Convolution
3.1.1. Twice-Split
3.1.2. Graph Fusion Convolution
3.2. Graph Convolution
3.3. Global Pooling and Fully Connected Layer
4. Dataset Details
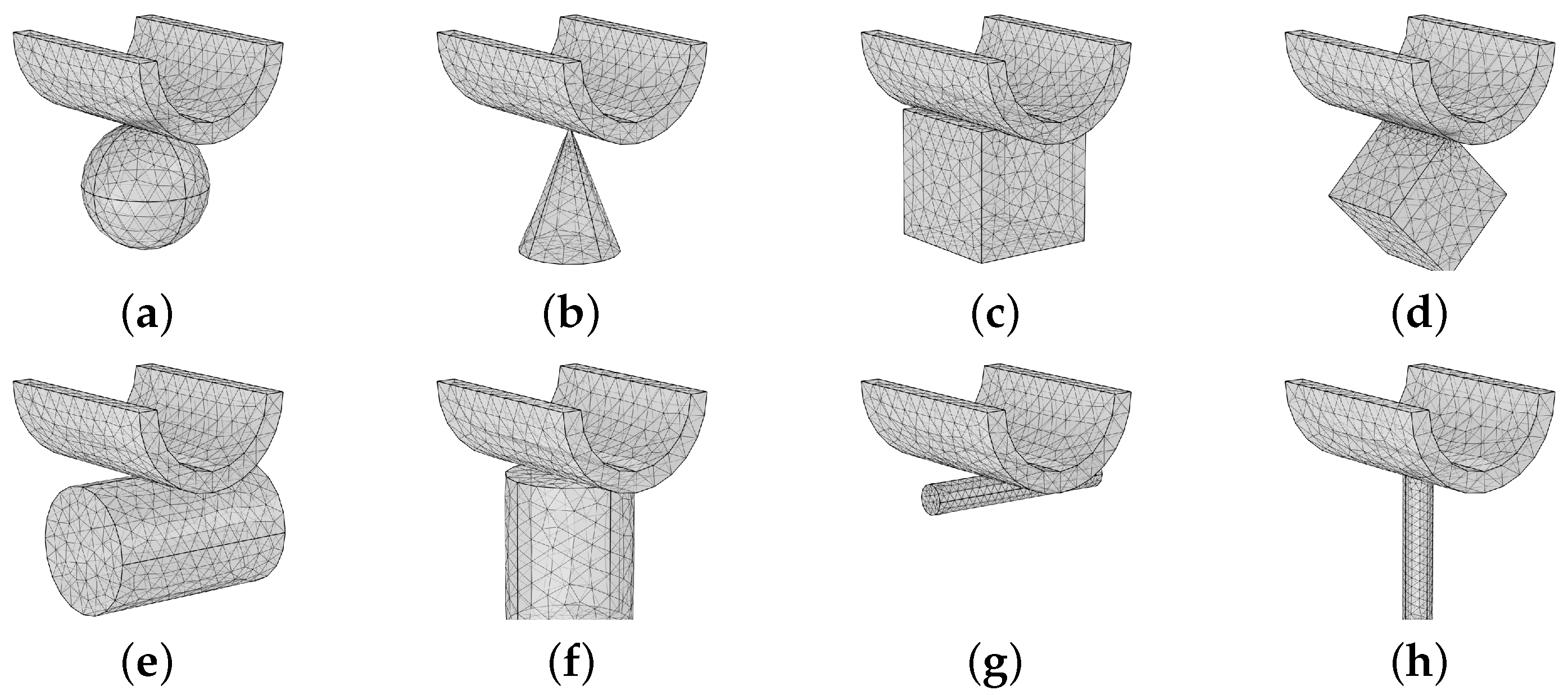
4.1. Simulation Dataset
4.1.1. Stress Defect
4.1.2. Corrosion Defect
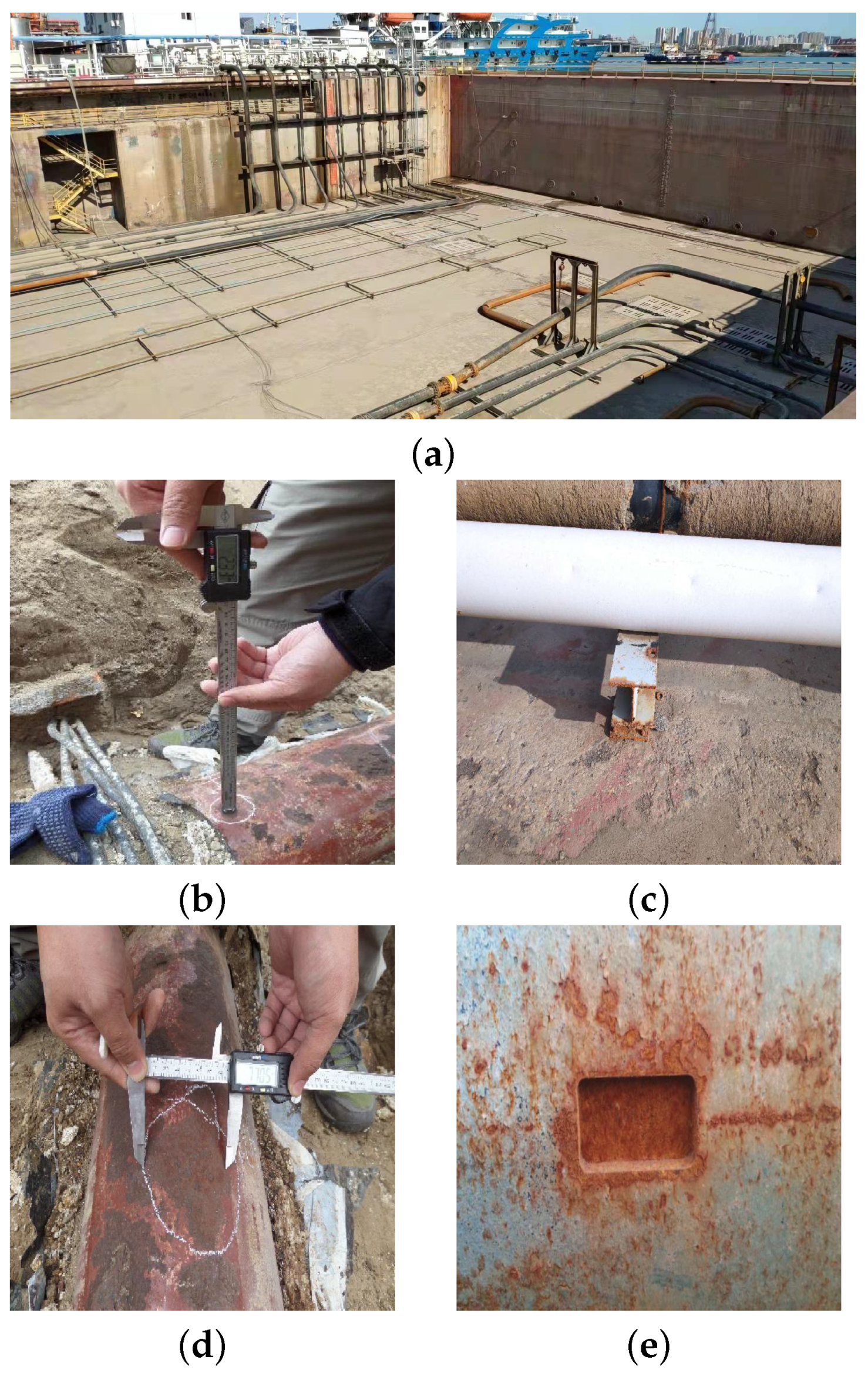
4.2. Experimental Dataset
5. Experiment
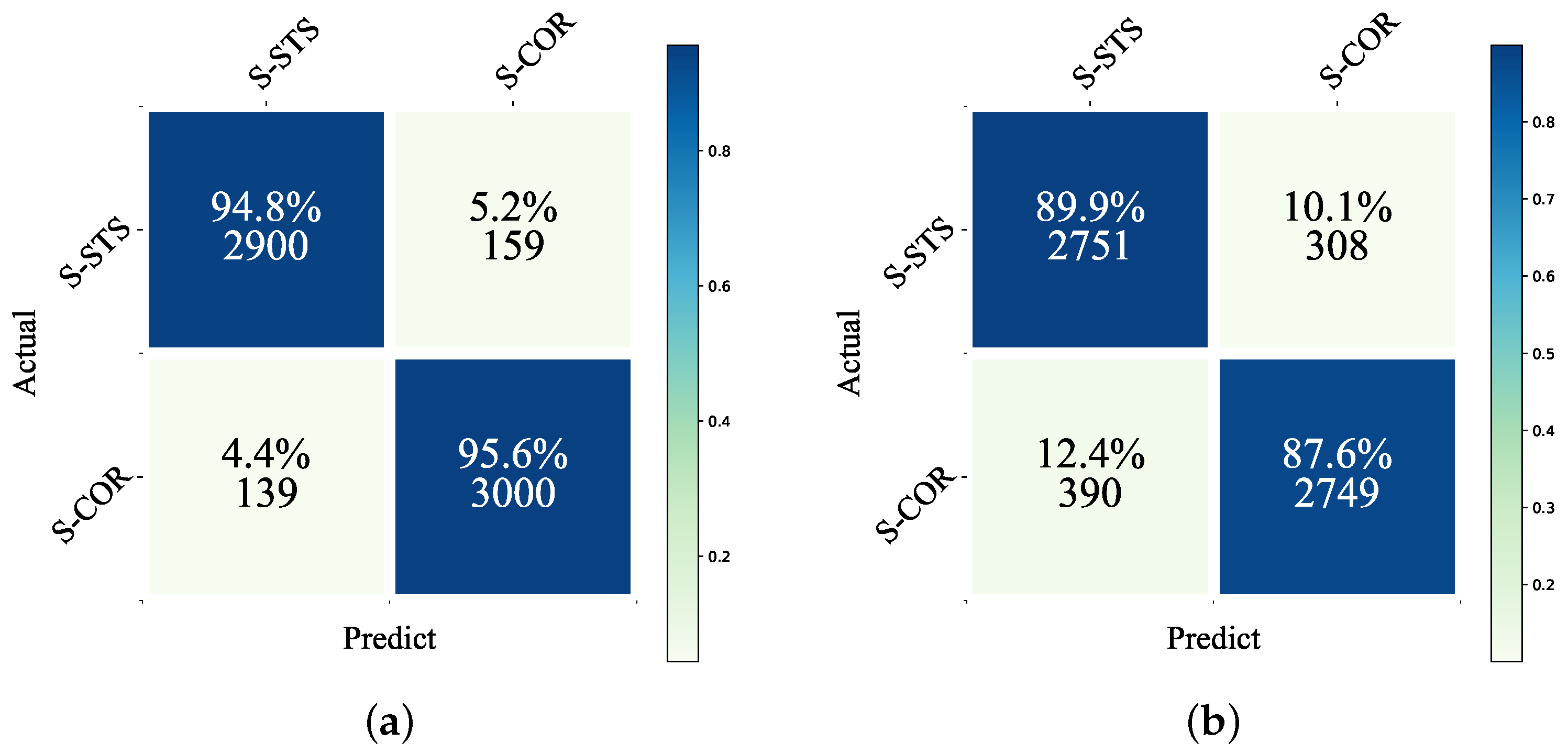
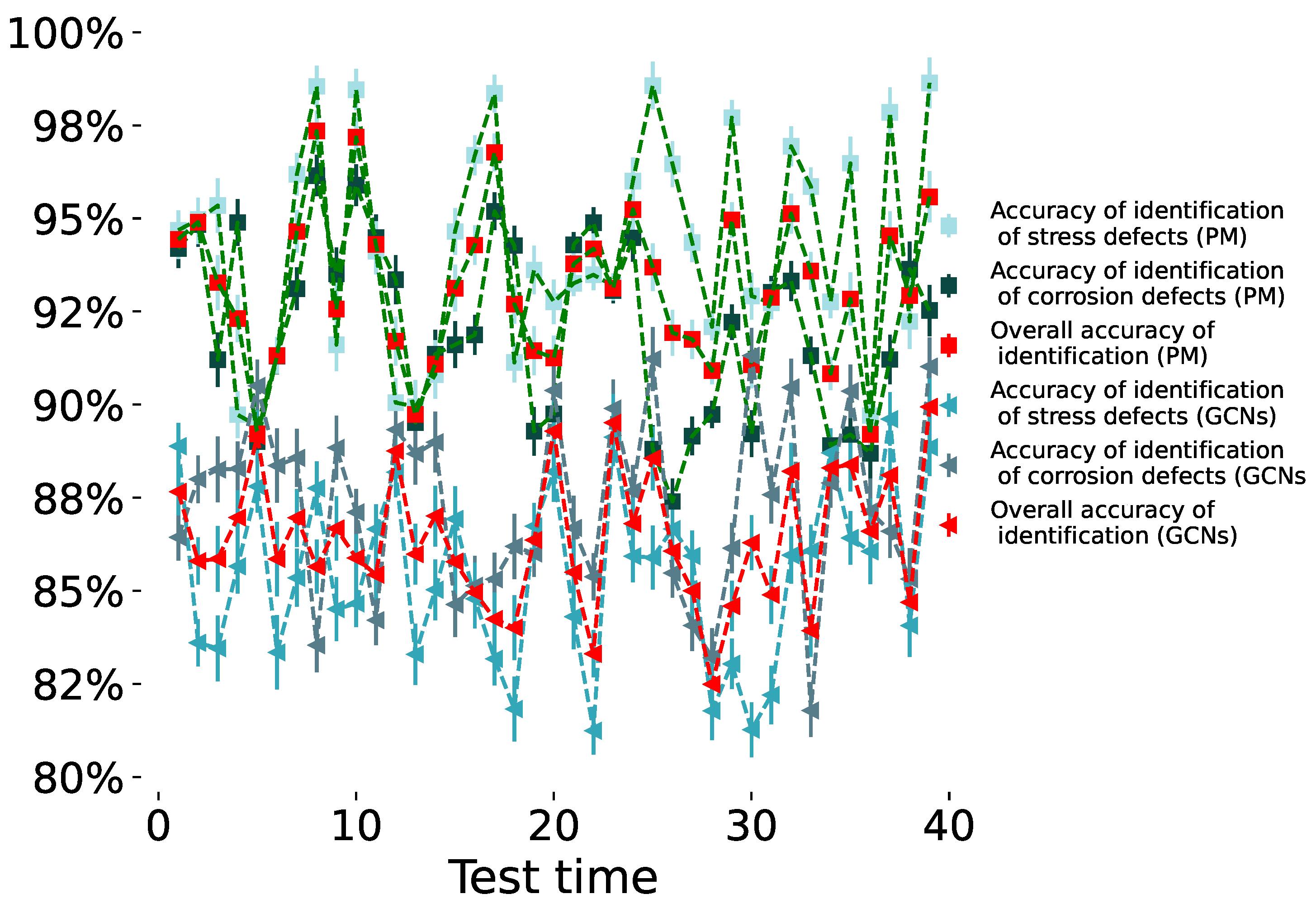
5.1. Analysis of the Validity of Our Proposed Method
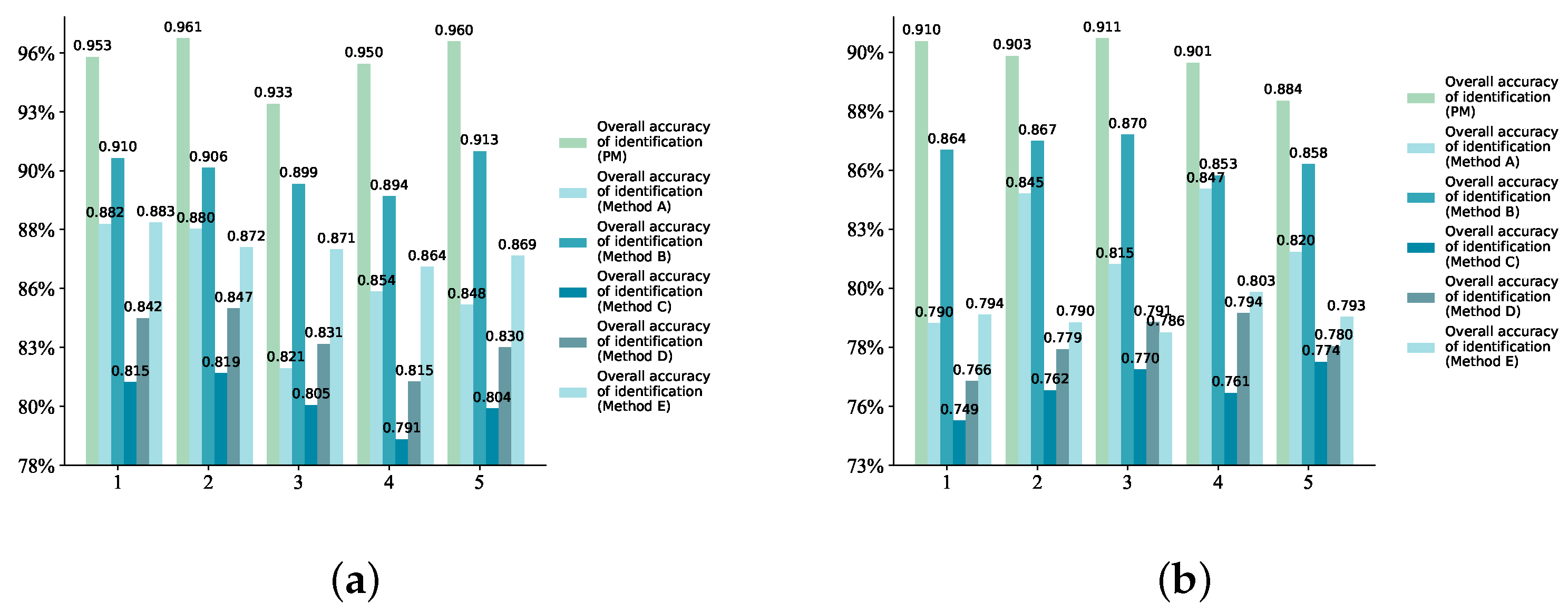
5.2. Comparison of Different Method
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, Z.; Zha, X.; Chen, H.; Sun, Y.; Long, M. A simulation study for locating defects in tubes using the weak MFL signal based on the multi-channel correlation technique. Insight-Non-Destr. Test. Cond. Monit. 2015, 57, 518–527. [Google Scholar] [CrossRef]
- Dutta, S.M.; Ghorbel, F.H.; Stanley, R.K. Simulation and analysis of 3-D magnetic flux leakage. IEEE Trans. Magn. 2009, 45, 1966–1972. [Google Scholar] [CrossRef]
- Feng, J.; Li, F.; Lu, S.; Liu, J.; Ma, D. Injurious or noninjurious defect identification from MFL images in pipeline inspection using convolutional neural network. IEEE Trans. Instrum. Meas. 2017, 66, 1883–1892. [Google Scholar] [CrossRef]
- Lu, S.; Feng, J.; Zhang, H.; Liu, J.; Wu, Z. An estimation method of defect size from MFL image using visual transformation convolutional neural network. IEEE Trans. Ind. Inform. 2018, 15, 213–224. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, X.; Wu, B.; Xiao, J.; Wu, D.; He, C. Dipole modeling of stress-dependent magnetic flux leakage. NDT E Int. 2018, 95, 1–8. [Google Scholar] [CrossRef]
- Wang, Z.; Yao, K.; Deng, B.; Ding, K. Quantitative study of metal magnetic memory signal versus local stress concentration. Ndt E Int. 2010, 43, 513–518. [Google Scholar] [CrossRef]
- Yao, K.; Wang, Z.; Deng, B.; Shen, K. Experimental research on metal magnetic memory method. Exp. Mech. 2012, 52, 305–314. [Google Scholar] [CrossRef]
- Shi, P.; Bai, P.; Chen, H.e.; Su, S.; Chen, Z. The magneto-elastoplastic coupling effect on the magnetic flux leakage signal. J. Magn. Magn. Mater. 2020, 504, 166669. [Google Scholar] [CrossRef]
- Janakiraman, S.; Daniel, J.; Abudhahir, A. Certain studies on thresholding based defect detection algorithms for Magnetic Flux Leakage images. In Proceedings of the 2013 IEEE International Conference ON Emerging Trends in Computing, Communication and Nanotechnology (ICECCN), Tirunelveli, India, 25–26 March 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 507–512. [Google Scholar]
- Li, F.; Feng, J.; Lu, S.; Liu, J.; Yao, Y. Convolution neural network for classification of magnetic flux leakage response segments. In Proceedings of the 2017 6th Data Driven Control and Learning Systems (DDCLS), Chongqing, China, 26–27 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 152–155. [Google Scholar]
- Zhang, J.; Zheng, P.; Tan, X. Recognition of broken wire rope based on remanence using EEMD and wavelet methods. Sensors 2018, 18, 1110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, L.; Wang, Z.; Gao, S.; Shi, M.; Liu, B. Magnetic flux leakage image classification method for pipeline weld based on optimized convolution kernel. Neurocomputing 2019, 365, 229–238. [Google Scholar] [CrossRef]
- Liu, J.; Fu, M.; Liu, F.; Feng, J.; Cui, K. Window feature-based two-stage defect identification using magnetic flux leakage measurements. IEEE Trans. Instrum. Meas. 2017, 67, 12–23. [Google Scholar] [CrossRef]
- Khodayari-Rostamabad, A.; Reilly, J.P.; Nikolova, N.K.; Hare, J.R.; Pasha, S. Machine learning techniques for the analysis of magnetic flux leakage images in pipeline inspection. IEEE Trans. Magn. 2009, 45, 3073–3084. [Google Scholar] [CrossRef] [Green Version]
- Bieńkowski, A. Magnetoelastic Villari effect in Mn–Zn ferrites. J. Magn. Magn. Mater. 2000, 215, 231–233. [Google Scholar] [CrossRef]
- Saha, S.; Mukhopadhyay, S.; Mahapatra, U.; Bhattacharya, S.; Srivastava, G. Empirical structure for characterizing metal loss defects from radial magnetic flux leakage signal. Ndt E Int. 2010, 43, 507–512. [Google Scholar] [CrossRef]
- Jian, F.; Jun-Feng, Z.; Sen-Xiang, L.; Hong-Yang, W.; Rui-Ze, M. Three-axis magnetic flux leakage in-line inspection simulation based on finite-element analysis. Chin. Phys. B 2013, 22, 018103. [Google Scholar]
- Al-Naemi, F.; Hall, J.P.; Moses, A.J. FEM modelling techniques of magnetic flux leakage-type NDT for ferromagnetic plate inspections. J. Magn. Magn. Mater. 2006, 304, e790–e793. [Google Scholar] [CrossRef]
- Yilai, M.; Li, L. Research on internal and external defect identification of drill pipe based on weak magnetic inspection. Insight-Non-Destr. Test. Cond. Monit. 2014, 56, 31–34. [Google Scholar] [CrossRef]
- Zuoying, H.; Peiwen, Q.; Liang, C. 3D FEM analysis in magnetic flux leakage method. Ndt E Int. 2006, 39, 61–66. [Google Scholar] [CrossRef]
- Chang, Y.; Jiao, J.; Li, G.; Liu, X.; He, C.; Wu, B. Effects of excitation system on the performance of magnetic-flux-leakage-type non-destructive testing. Sens. Actuators A Phys. 2017, 268, 201–212. [Google Scholar] [CrossRef]
- Parra-Raad, J.A.; Roa-Prada, S. Multi-Objective Optimization of a Magnetic Circuit for Magnetic Flux Leakage-Type Non-destructive Testing. J. Nondestruct. Eval. 2016, 35, 14. [Google Scholar] [CrossRef]
- Liu, B.; Liu, Z.; Luo, N.; He, L.; Ren, J.; Zhang, H. Research on Features of Pipeline Crack Signal Based on Weak Magnetic Method. Sensors 2020, 20, 810. [Google Scholar] [CrossRef] [PubMed]
- Mao, B.; Lu, Y.; Wu, P.; Mao, B.; Li, P. Signal processing and defect analysis of pipeline inspection applying magnetic flux leakage methods. Intell. Serv. Robot. 2014, 7, 203–209. [Google Scholar] [CrossRef]
- Feng, J.; Lu, S.; Liu, J.; Li, F. A sensor liftoff modification method of magnetic flux leakage signal for defect profile estimation. IEEE Trans. Magn. 2017, 53, 1–13. [Google Scholar] [CrossRef]
- Zhu, X.; Ghahramani, Z.; Lafferty, J.D. Semi-supervised learning using gaussian fields and harmonic functions. In Proceedings of the 20th International Conference on Machine Learning (ICML-03), Washington, DC, USA, 21–24 August 2003; pp. 912–919. [Google Scholar]
- Kipf, T.N.; Welling, M. Semi-supervised classification with graph convolutional networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [Green Version]
- Irving, B. maskSLIC: Regional superpixel generation with application to local pathology characterisation in medical images. arXiv 2016, arXiv:1606.09518. [Google Scholar]
- Knyazev, B.; Lin, X.; Amer, M.R.; Taylor, G.W. Image Classification with Hierarchical Multigraph Networks. arXiv 2019, arXiv:1907.09000. [Google Scholar]
- Gao, H.; Ji, S. Graph U-Nets. In Proceedings of the 36th International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; Volume 97, pp. 2083–2092. [Google Scholar]
- Zhao, X.; Lord, D. Application of the Villari effect to electric power harvesting. J. Appl. Phys. 2006, 99, 08M703. [Google Scholar] [CrossRef]
- O Rourke, T.; Jung, J.; Argyrou, C. Underground pipeline response to earthquake-induced ground deformation. Soil Dyn. Earthq. Eng. 2016, 91, 272–283. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.; Randolph, M.F. Large deformation finite-element analysis of submarine landslide interaction with embedded pipelines. Int. J. Geomech. 2010, 10, 145–152. [Google Scholar] [CrossRef]
- Zhang, P.; Long, H.; Li, Z.; Qin, G.; Sun, L. Finite element simulation on mechanical behavior of buried oil/gas pipeline in loess collapse process. J. Saf. Sci. Technol. 2017, 13, 48–55. [Google Scholar]
- Bikmukhametov, D.F.; Korobkov, G.E.; Yanchushka, A.P. Features of Aboveground Pipeline Compensation Part Stress-Deformed Study at Permafrost. Mod. Appl. Sci. 2015, 9, 204. [Google Scholar]
- Susto, G.A.; Schirru, A.; Pampuri, S.; McLoone, S. Supervised aggregative feature extraction for big data time series regression. IEEE Trans. Ind. Inform. 2015, 12, 1243–1252. [Google Scholar] [CrossRef] [Green Version]
- Bernieri, A.; Ferrigno, L.; Laracca, M.; Molinara, M. Crack shape reconstruction in eddy current testing using machine learning systems for regression. IEEE Trans. Instrum. Meas. 2008, 57, 1958–1968. [Google Scholar] [CrossRef]
- Xu, C.; Wang, C.; Ji, F.; Yuan, X. Finite-element neural network-based solving 3-D differential equations in MFL. IEEE Trans. Magn. 2012, 48, 4747–4756. [Google Scholar] [CrossRef]
- Parikh, D.; Kim, M.T.; Oagaro, J.; Mandayam, S.; Polikar, R. Ensemble of classifiers approach for NDT data fusion. In Proceedings of the IEEE Ultrasonics Symposium, Montreal, QC, Canada, 23–27 August 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 2, pp. 1062–1065. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Train Dataset | Test Dataset | ||||
|---|---|---|---|---|---|
| Experimental data | Simulation data | Experimental data | |||
| Production environment | Experimental platform | Production environment | Experimental platform | ||
| Corrosion defect | 175 | 175 | 15,000 | 175 | 175 |
| Stress defect | 15 | 135 | 15,000 | 15 | 135 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Lu, S.; Dong, X. Stress and Corrosion Defect Identification in Weak Magnetic Leakage Signals Using Multi-Graph Splitting and Fusion Graph Convolution Networks. Machines 2023, 11, 70. https://doi.org/10.3390/machines11010070
Zhang S, Lu S, Dong X. Stress and Corrosion Defect Identification in Weak Magnetic Leakage Signals Using Multi-Graph Splitting and Fusion Graph Convolution Networks. Machines. 2023; 11(1):70. https://doi.org/10.3390/machines11010070
Chicago/Turabian StyleZhang, Shaoxuan, Senxiang Lu, and Xu Dong. 2023. "Stress and Corrosion Defect Identification in Weak Magnetic Leakage Signals Using Multi-Graph Splitting and Fusion Graph Convolution Networks" Machines 11, no. 1: 70. https://doi.org/10.3390/machines11010070