
Obstacle Detection by Autonomous Vehicles: An Adaptive Neighborhood Search Radius Clustering Approach

Abstract
:1. Introduction
2. Data Pre-processing
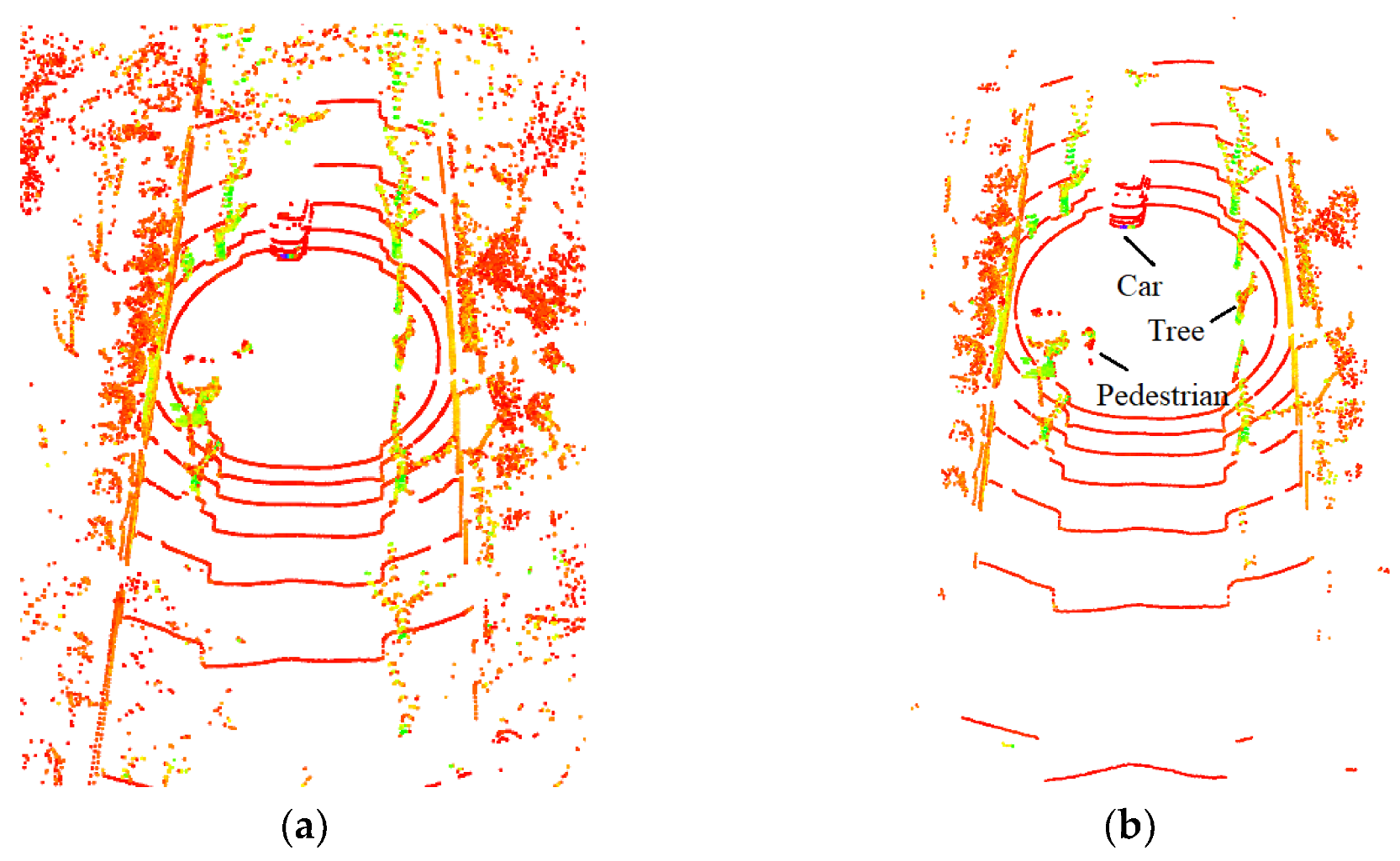
2.1. Interference Points Removal
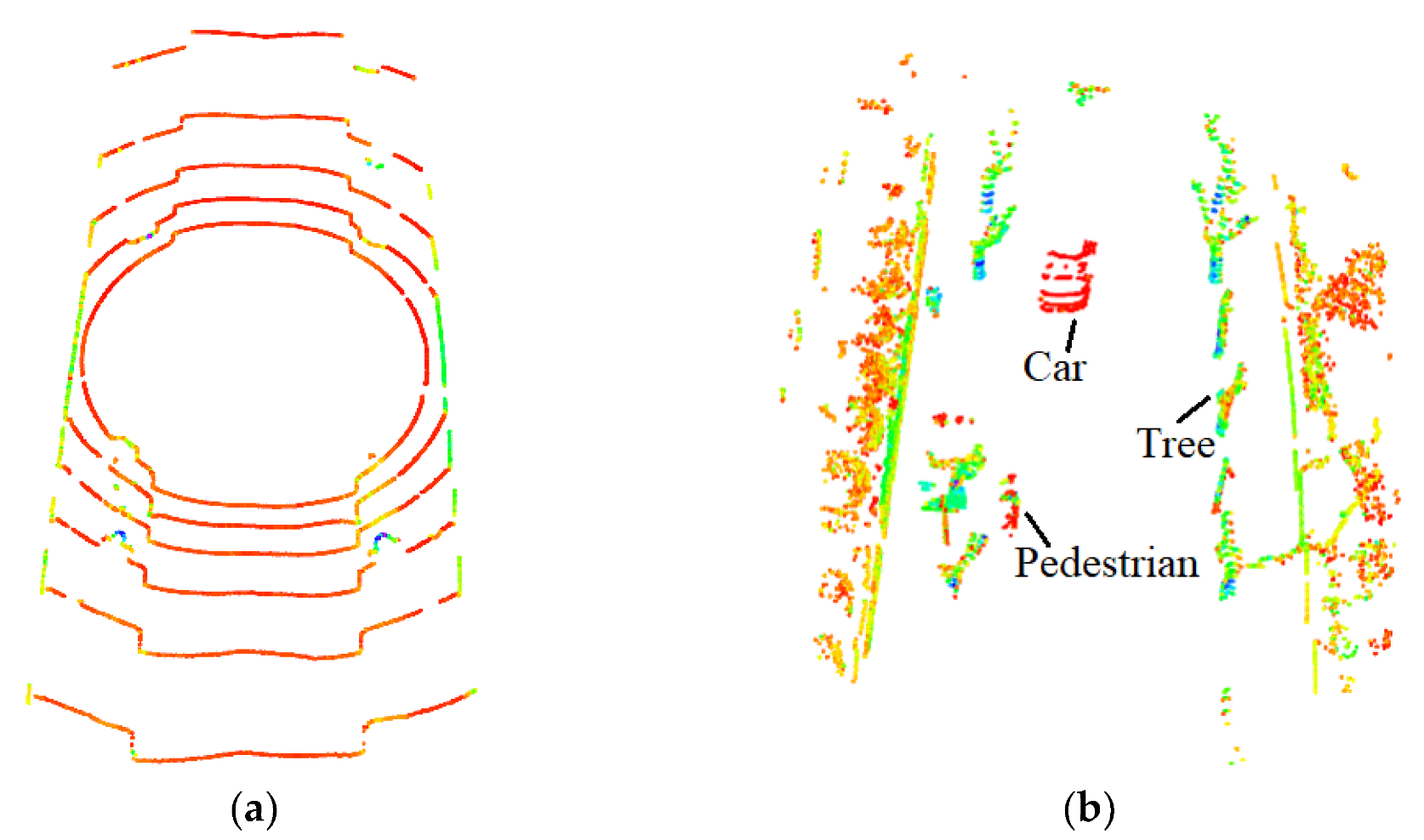
2.2. Ground Segmentation
| Algorithm 1: Ground segmentation Input: P (Point cloud) Output: Pon (Ground point cloud), Poff (Obstacle point cloud) | |
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | Split P into three sections along the direction of vehicle driving: P1, P2 and P3; Initialize Num, SumHeight, AveHeight, InitialSet; foreach p ∈ Poff do Pi is sorted by z - axis height value from lowest to highest to obtain Pi*; while Num < N do SumHeight = SumHeight + Pi*[num].z; Num = Num + 1; end AveHeight = SumHeight/N; foreach p ∈ Pi* do if p.z <= AveHeight + △h then InitialSet = InitialSet ∪{p}; end end \\Use initial points for plane fitting; Pon = Pon ∪ PlaneFitting(InitialSet); Poff = P \ PlaneFitting(InitialSet); end return |
3. Adaptive Neighborhood Search Radius Clustering Algorithm
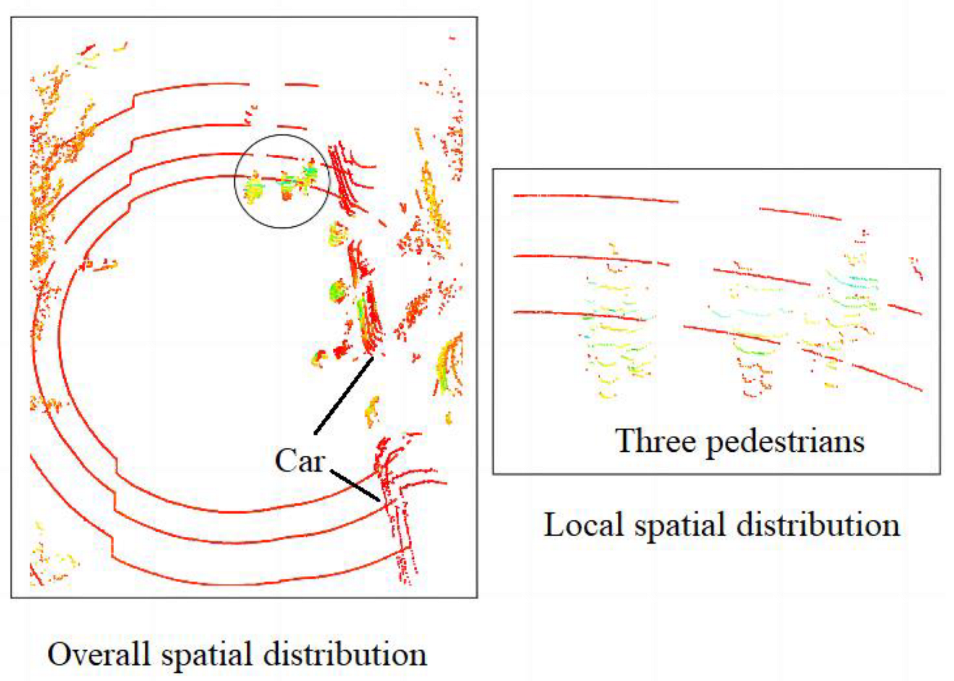
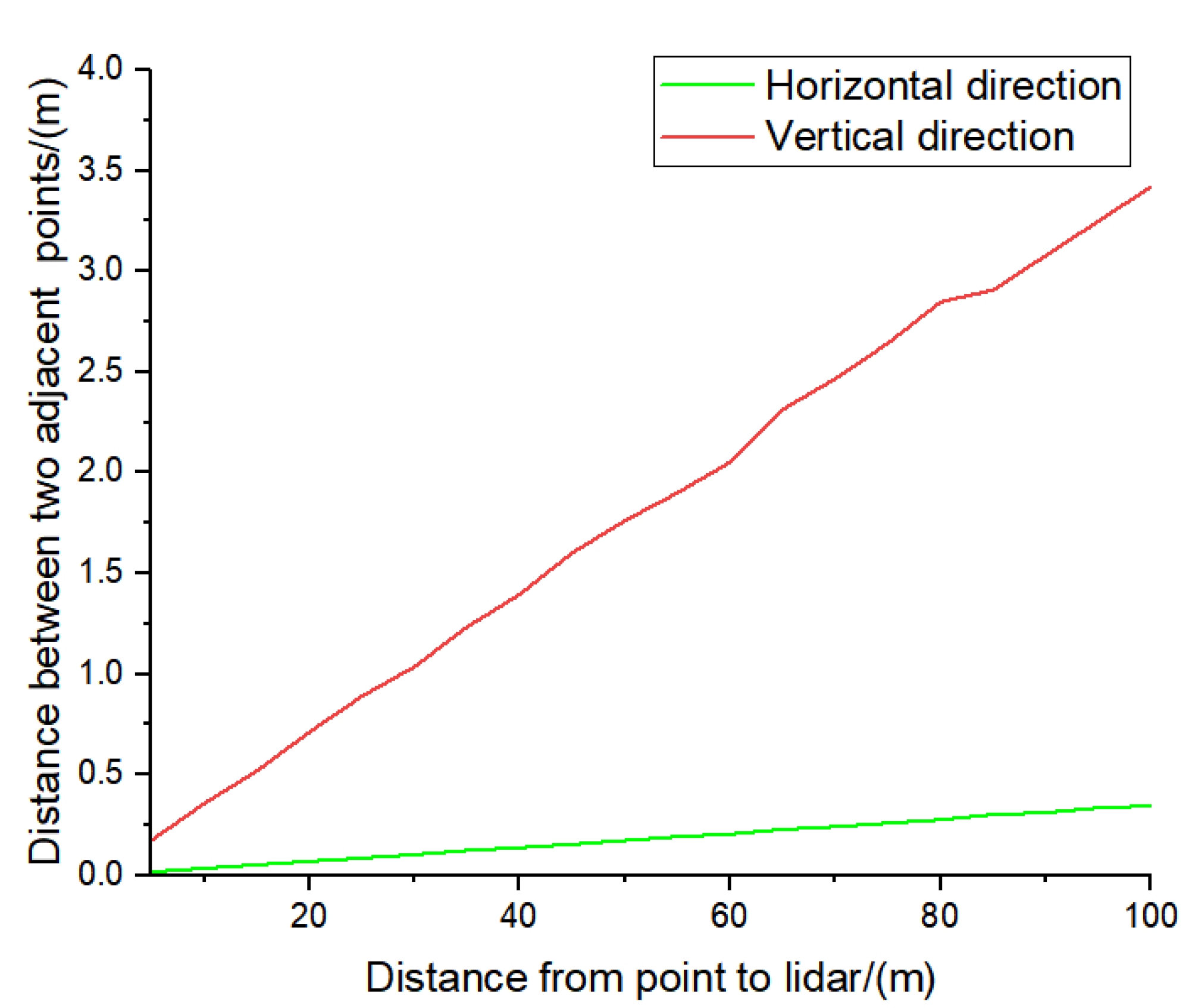
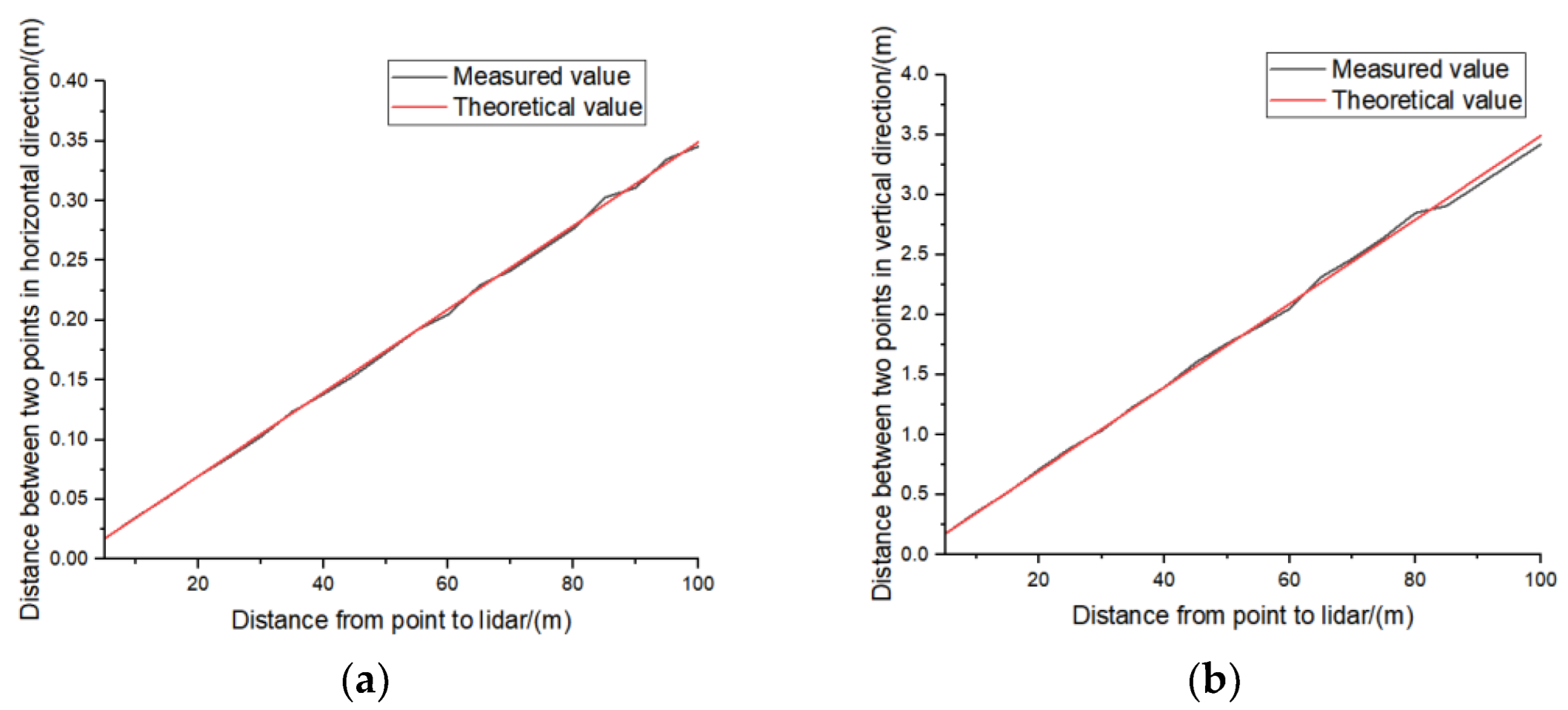
3.1. Analysis of Point Cloud Spatial Distribution
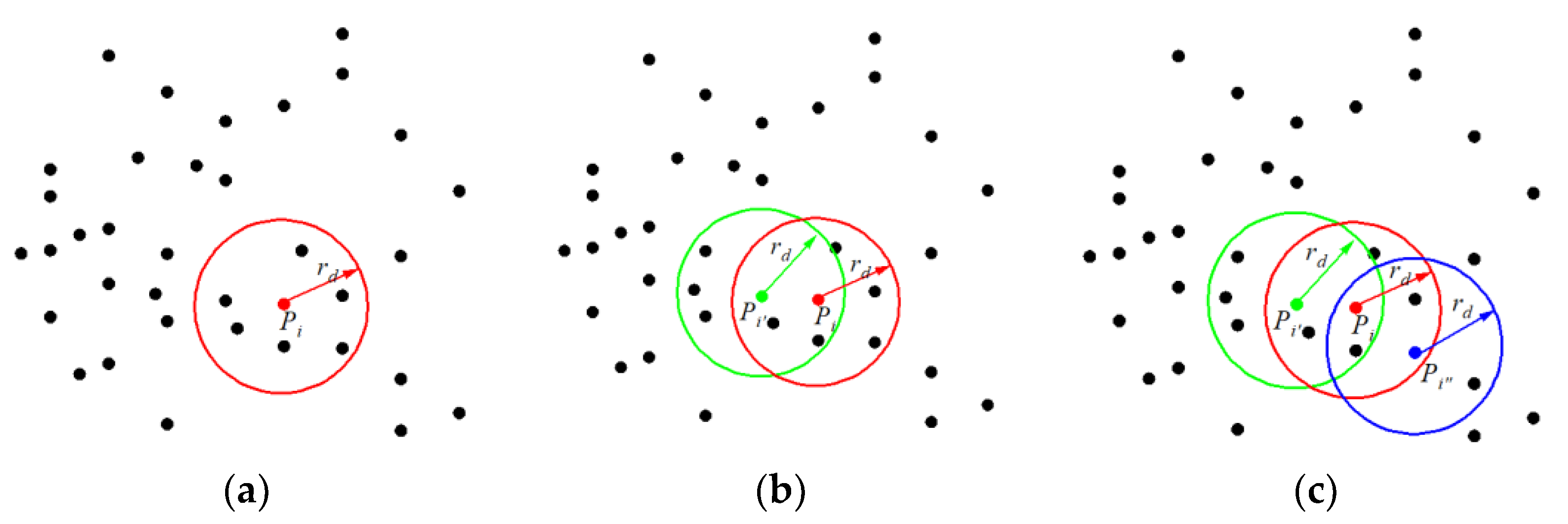
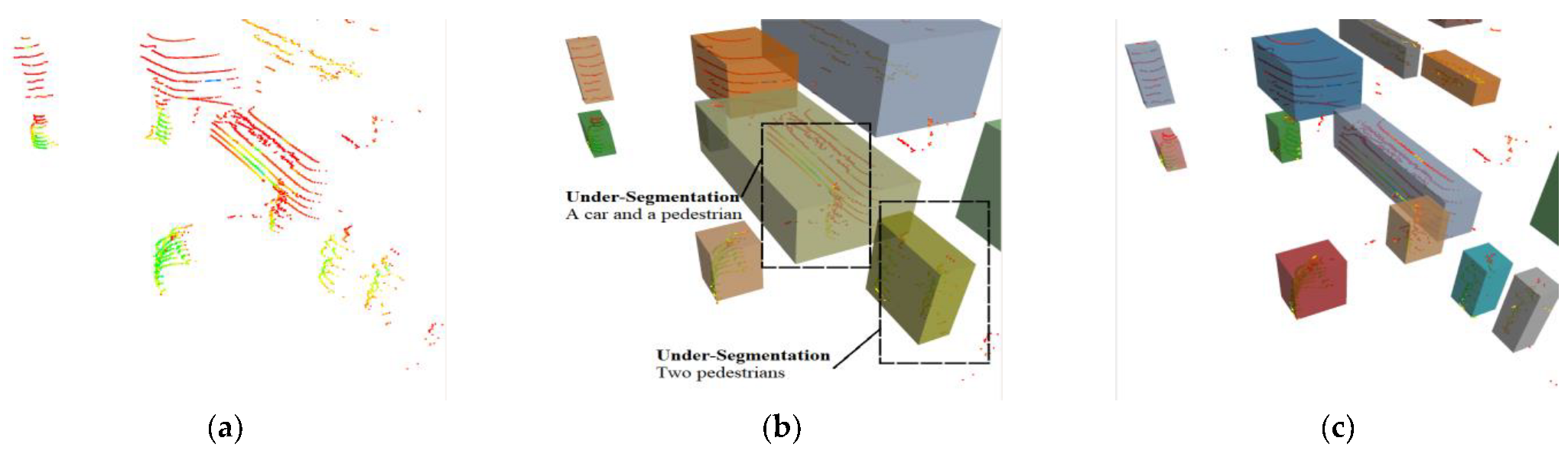
3.2. Analysis of Fixed Neighborhood Search Radius Clustering Algorithm
3.3. Design of Adaptive Clustering Search Radius
| Algorithm 2: Adaptive neighborhood search radius clustering algorithm Input: Poff (Obstacle point cloud), α, ω Output: ObstacleList | |
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 | Initialize Obstacle, SeedSet; foreach p ∈ Poff do if p.label = = PROCESSED then continue; else \\Calculate the rd of point p based on α, ω and R, and search for neighbor points; SeedSet = NeighborhoodSearch(p, rd(p, α, ω, R)); Obstacle = {p}∪ SeedSet; p.label = PROCESSED; end while SeedSet ≠ Φ do foreach q ∈ SeedSet do CurrPoint = SeedSet.first(); Obstacle = Obstacle ∪ NeighborhoodSearch(CurrPoint, rd(CurrPoint, α, ω, R)); SeedSet = SeedSet ∪ NeighborhoodSearch(CurrPoint, rd(CurrPoint, α, ω, R)); SeedSet = SeedSet \ {CurrPoint}; end foreach k ∈ Obstacle do \\Mark the processed points to prevent repeated clustering; k.label = PROCESSED; end ObstacleList.add(Obstacle); Obstacle = Φ; end end return |
4. Experiment Result
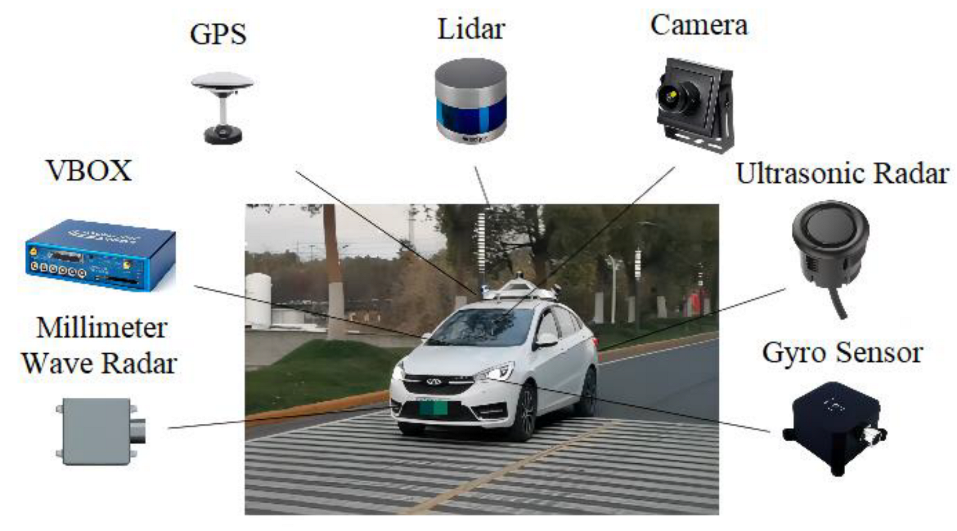
4.1. Experimental Vehicle
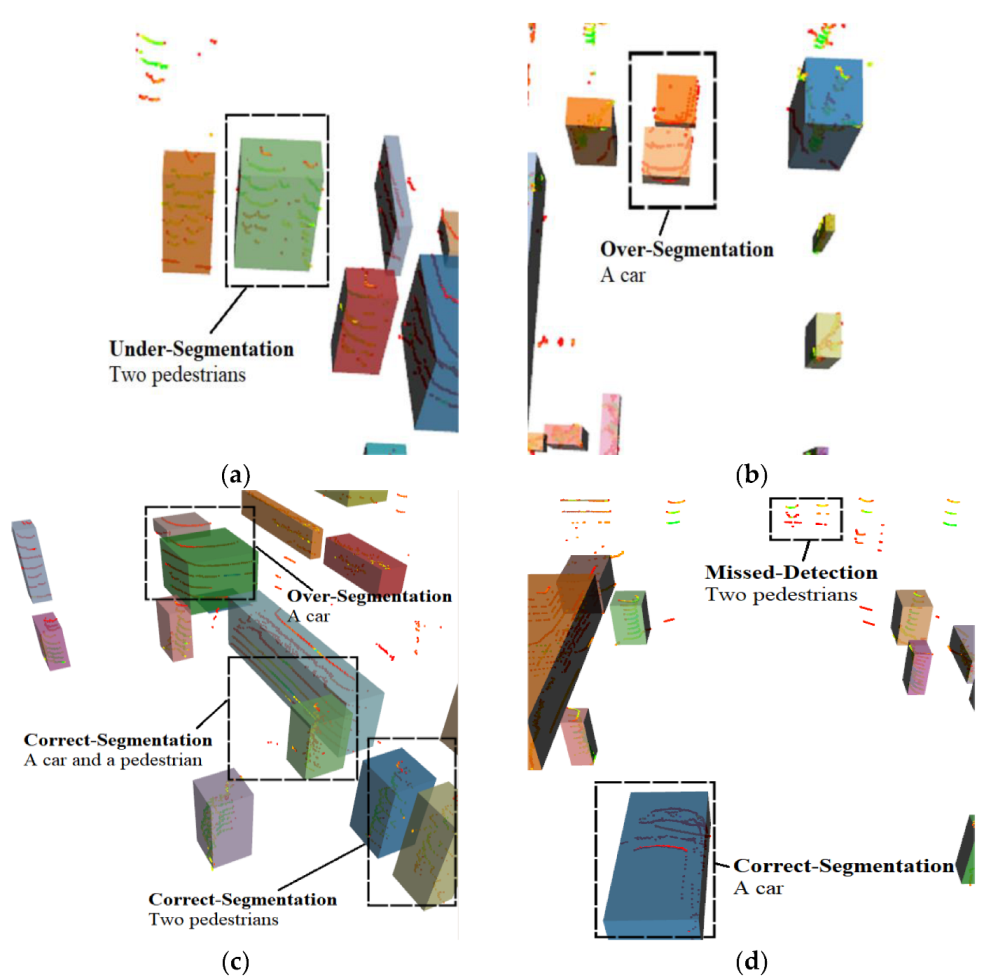
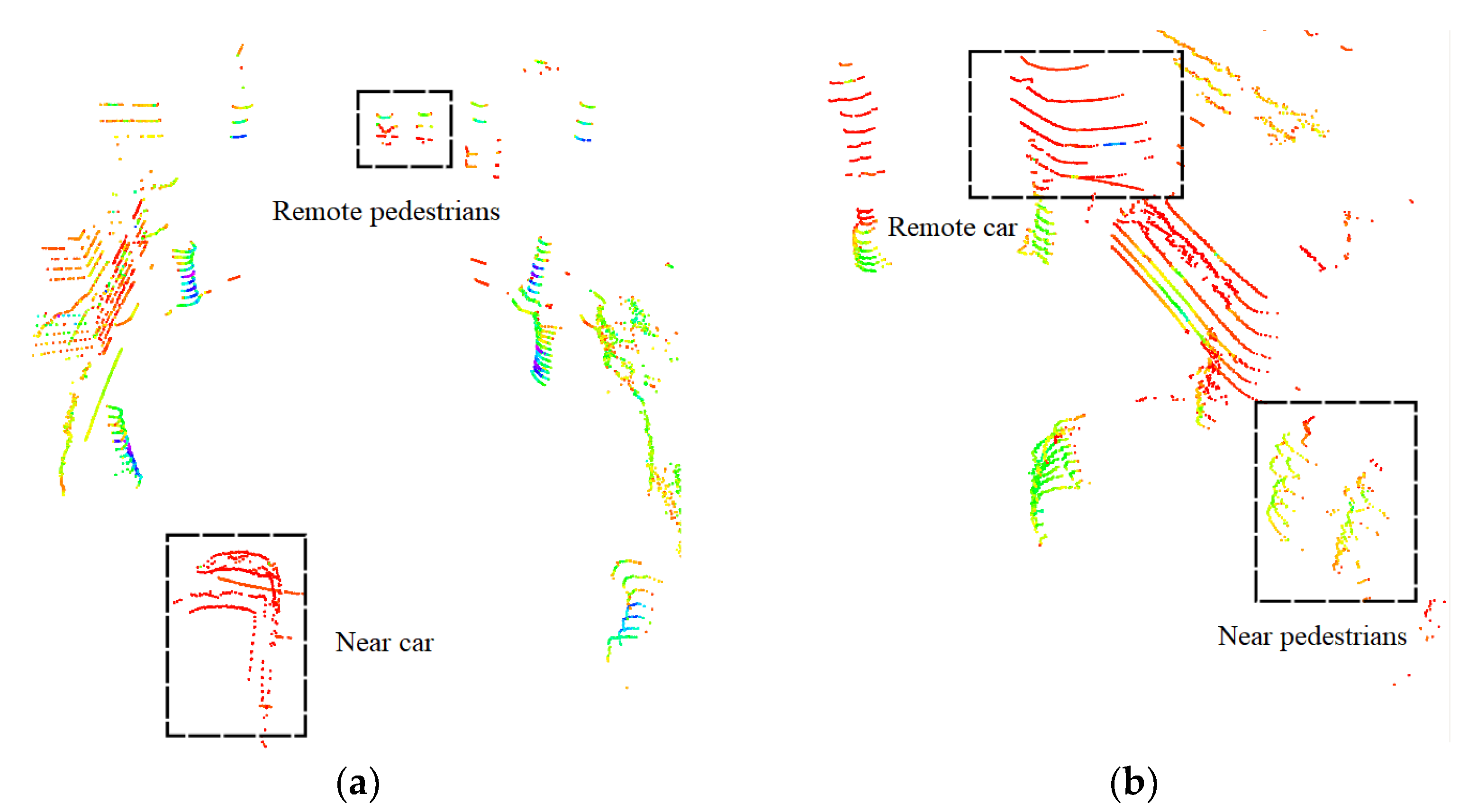
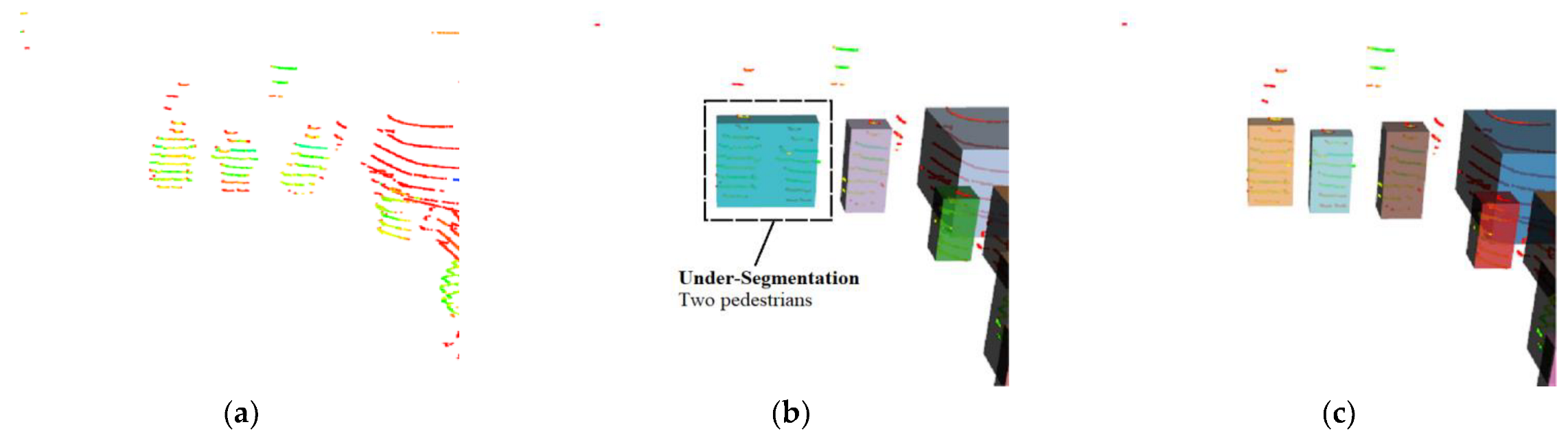
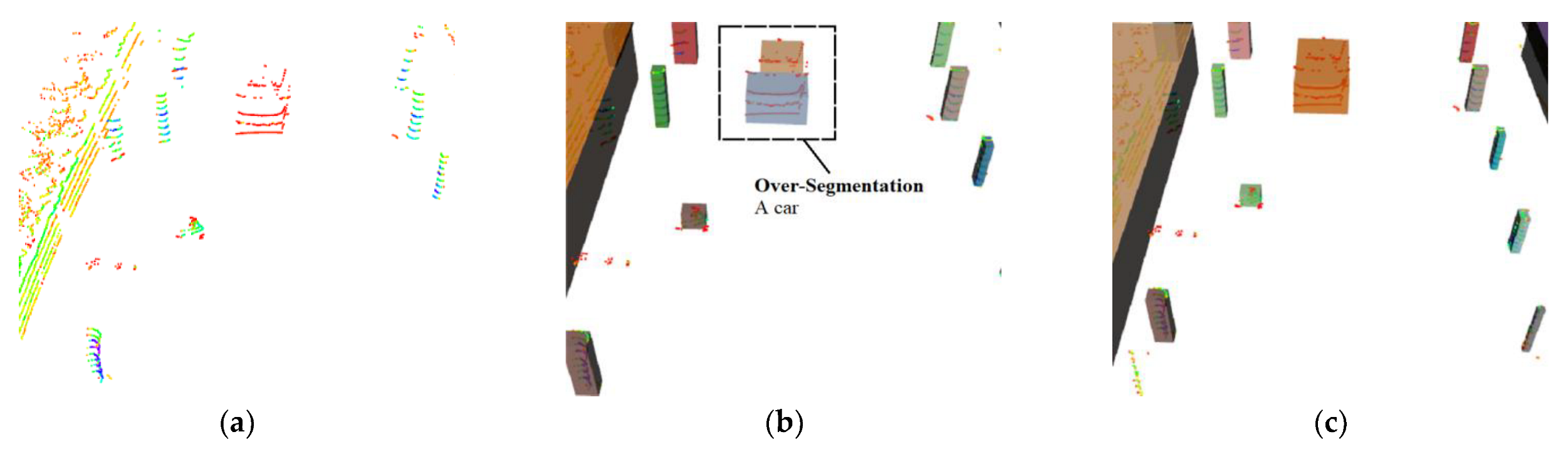
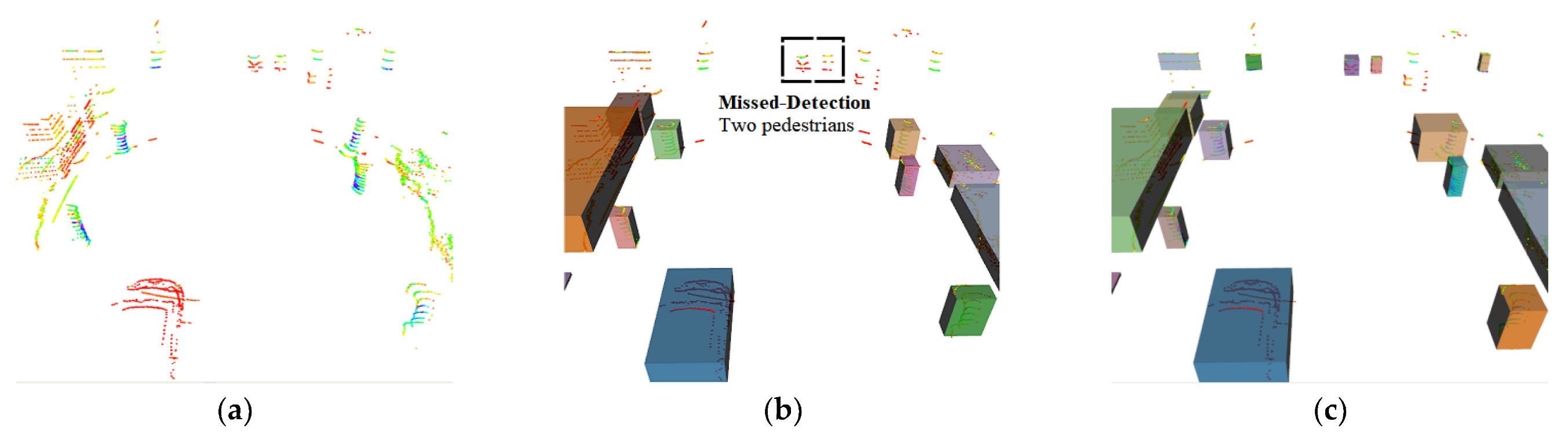
4.2. Multi-Scene Real Vehicle Experiments
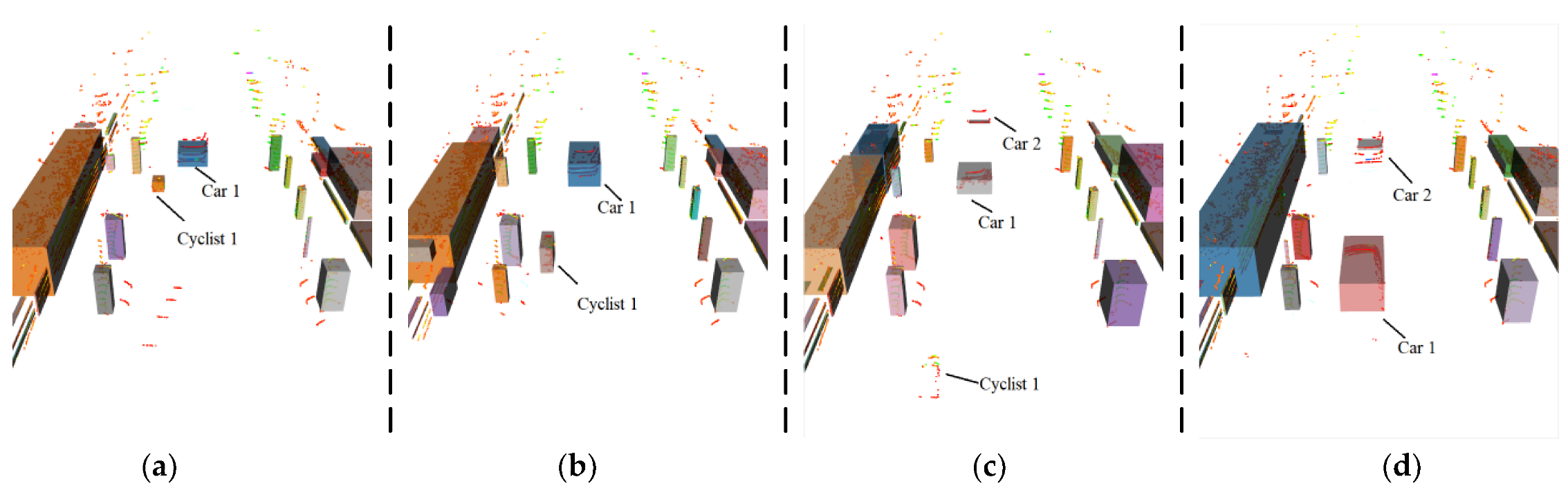
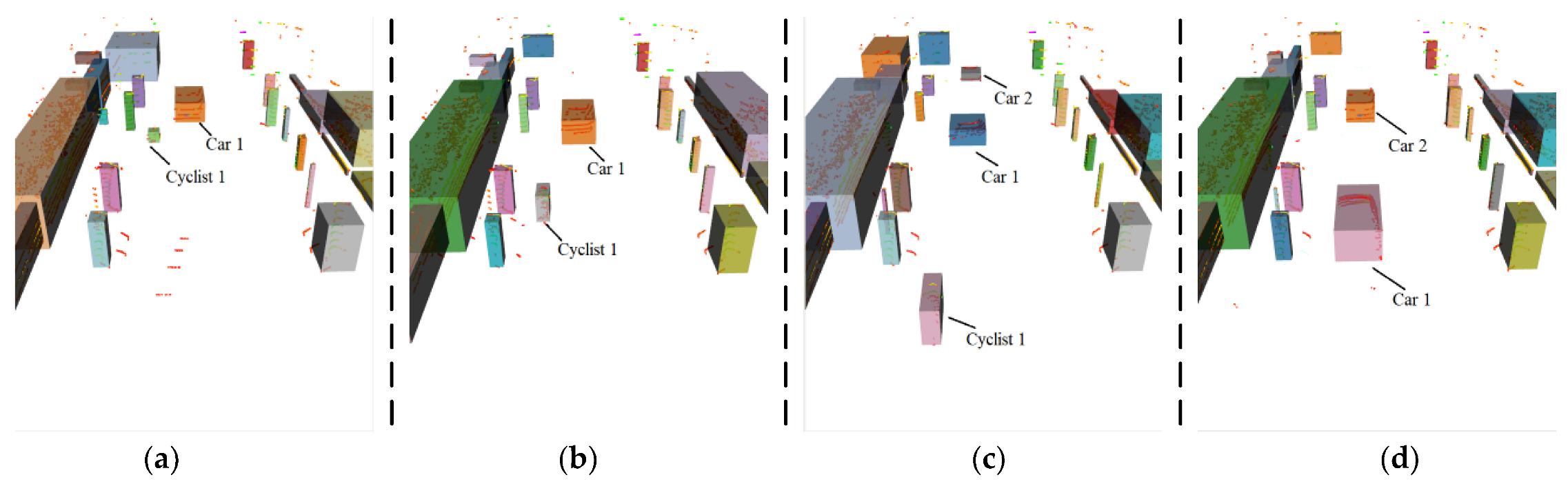
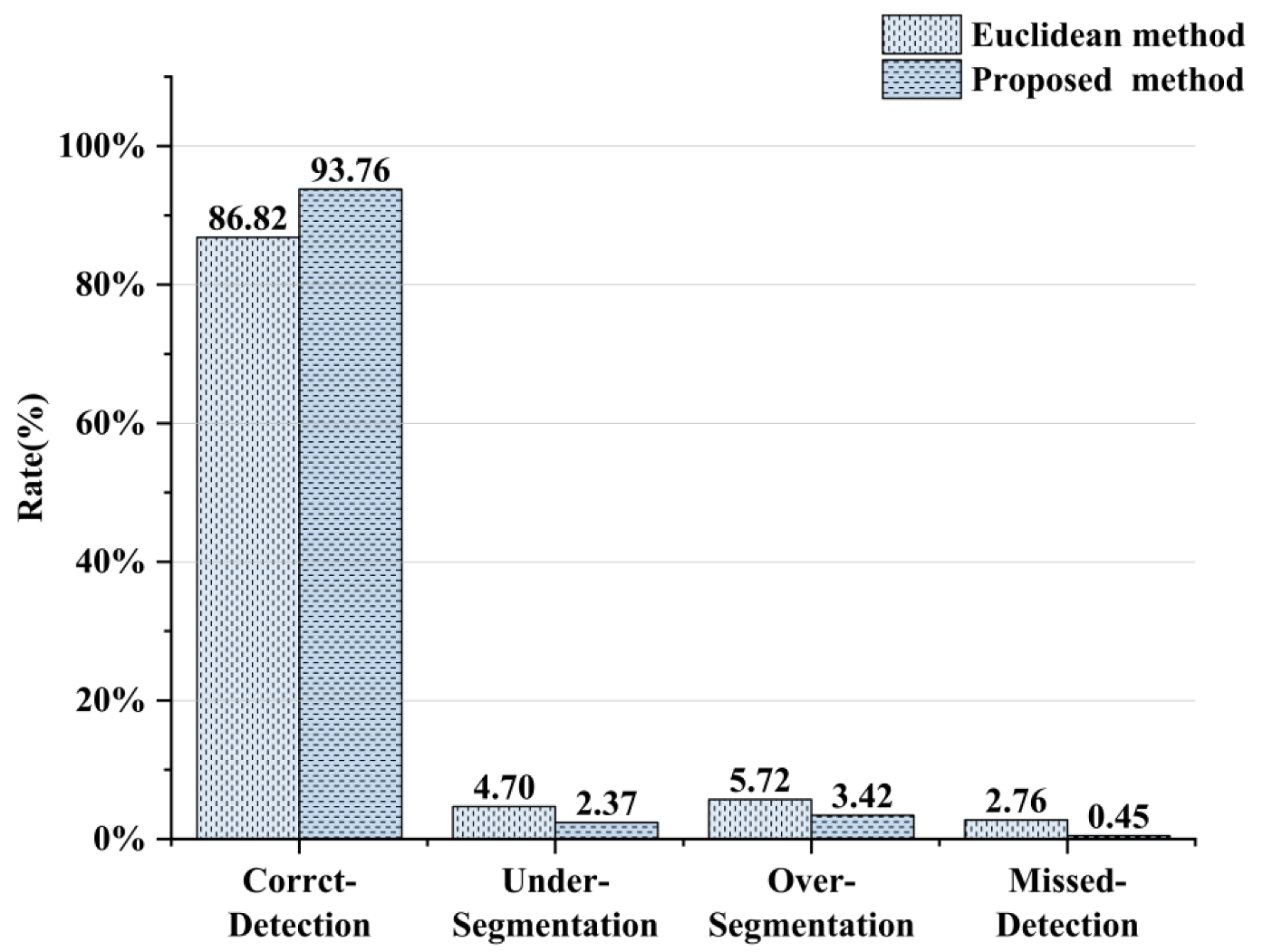
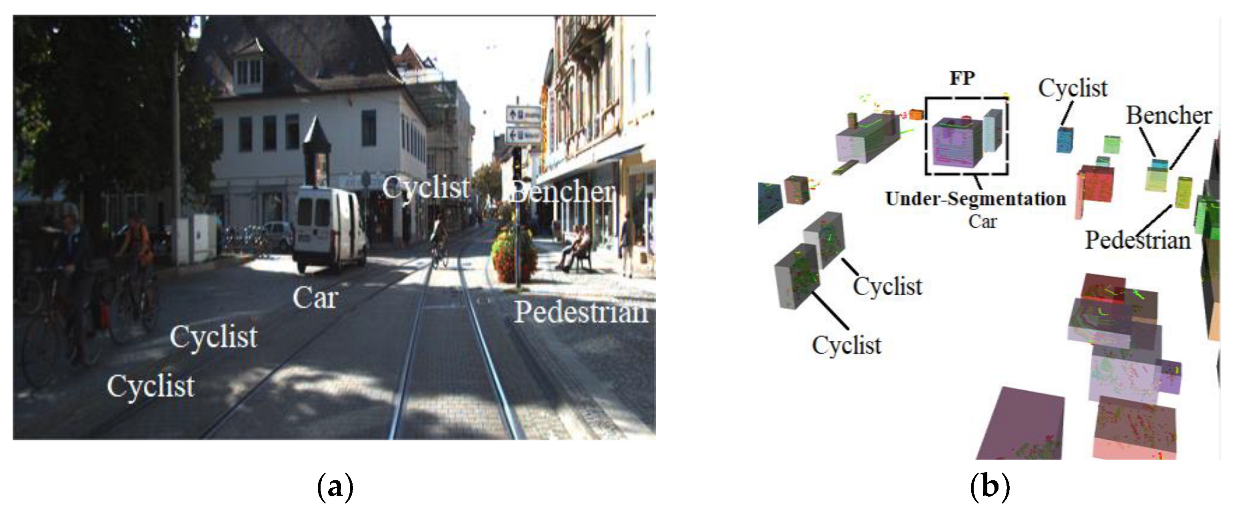
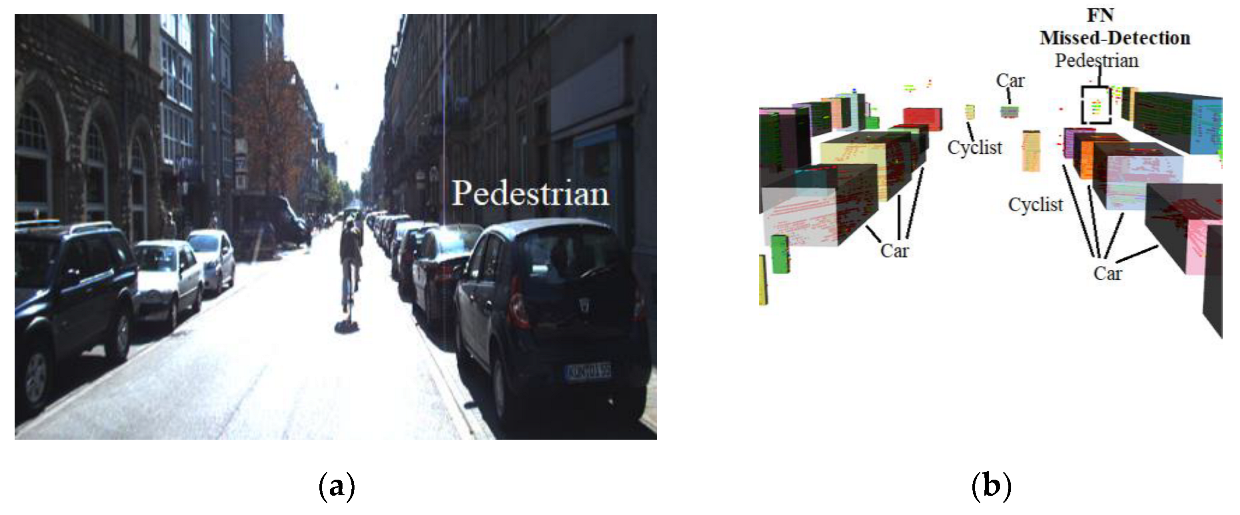
4.3. KITTI Datasets Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jin, X.; Yang, H.; Liao, X.; Yan, Z.; Wang, Q.; Li, Z.; Wang, Z. A Robust Gaussian Process-Based Lidar Ground Segmentation Algorithm for Autonomous Driving. Machines 2022, 10, 507. [Google Scholar] [CrossRef]
- Wang, G.; Wu, J.; He, R.; Yang, S. A Point Cloud-Based Robust Road Curb Detection and Tracking Method. IEEE Access 2019, 7, 24611–24625. [Google Scholar] [CrossRef]
- Dai, Y.; Lee, S. Perception, Planning and Control for Self-Driving System Based on On-Board Sensors. Adv. Mech. Eng. 2020, 12, 1–13. [Google Scholar] [CrossRef]
- Pendleton, S.D.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.H.; Rus, D.; Ang, M. Perception, Planning, Control, and Coordination for Autonomous Vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Shen, Z.; Liang, H.; Lin, L.; Wang, Z.; Huang, W.; Yu, J. Fast Ground Segmentation for 3D Lidar Point Cloud Based on Jump-Convolution-Process. Remote Sens. 2021, 13, 3239–3259. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Xie, D.; Xu, Y.; Wang, R. Obstacle Detection and Tracking Method for Autonomous Vehicle Based on Three-Dimensional Lidar. Int. J. Adv. Robot. Syst. 2019, 16, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. DBSCAN Revisited, Revisited: Why and How You Should (Still) Use DBSCAN. ACM Trans. Database Syst. (TODS) 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Sun, X.; Ma, H.; Sun, Y.; Liu, M. A Novel Point Cloud Compression Algorithm Based on Clustering. IEEE Robot. Autom. Lett. 2019, 4, 2132–2139. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, B.; Wang, X.; Tan, Y.; Qi, J.; Gong, J. A Fusion of Dynamic Occupancy Grid Mapping and Multi-Object Tracking Based on Lidar and Camera Sensors. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020. [Google Scholar]
- Zermas, D.; Izzat, I.; Papanikolopoulos, N. Fast Segmentation of 3D Point Clouds: A Paradigm on Lidar Data for Autonomous Vehicle Applications. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Li, Y.; Ma, L.; Zhong, Z.; Liu, F.; Chapman, M.A.; Cao, D.; Li, J. Deep Learning for Lidar Point Clouds in Autonomous Driving: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 3412–3432. [Google Scholar] [CrossRef]
- Lang, A.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; Beijborn, O. Pointpillars: Fast Encoders for Object Detection from Point Clouds. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Zhao, J.; Xu, H.; Liu, H.; Wu, J.; Zheng, Y.; Wu, D. Detection and Tracking of Pedestrians and Vehicles Using Roadside Lidar Sensors. Transp. Res. Part C Emerg. Technol. 2019, 100, 68–87. [Google Scholar] [CrossRef]
- Wang, C.; Ji, M.; Wang, J.; Wen, W.; Li, T.; Sun, Y. An Improved DBSCAN Method for Lidar Data Segmentation with Automatic Eps Estimation. Sensors 2019, 19, 172–197. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xia, X.; Zhu, S.; Zhou, Y.; Ye, M.; Zhao, Y. Lidar K-means Clustering Algorithm Based on Threshold. J. Beijing Univ. Aeronaut. Astronaut. 2020, 46, 115–121. [Google Scholar] [CrossRef]
- Li, X.; Zhang, Y.; Yang, Y. Outlier Detection for Reconstructed Point Clouds Based on Image. In Proceedings of the 2017 First International Conference on Electronics Instrumentation & Information Systems (EIIS), Harbin, China, 3–5 June 2017. [Google Scholar]
- Wang, X.; Wang, W.; Yin, X.; Xiang, C.; Zhang, Y. A New Grid Map Construction Method for Autonomous Vehicles. IFAC-PapersOnLine 2018, 51, 377–382. [Google Scholar] [CrossRef]
- Desheng, X.; Youchun, X.; Rendong, W. Obstacle Detection and Tracking for Unmanned Vehicles Based on 3D Laser Radar. Automot. Eng. 2018, 40, 952–959. [Google Scholar] [CrossRef]
- Yan, D.; Zeng, C.; Yan, S. Obstacle Circumnavigation System Based on Lidar Sensing. In Proceedings of the 2022 8th International Conference on Control, Automation and Robotics (ICCAR), Xiamen, China, 8–10 April 2022. [Google Scholar]
- Guo, R.; Jiang, Z.; Gao, R.; Yang, W.; Gao, Y.; Chen, X.; Zhi, Y.; Guo, L. Unmanned Vehicle 3D Lidar Point Cloud Segmentation. In Proceedings of the 2021 40th Chinese Control Conference (CCC) 2021, Shanghai, China, 26–28 July 2021. [Google Scholar]
- Wen, L.; He, L.; Gao, Z. Research on 3D Point Cloud De-Distortion Algorithm and Its Application on Euclidean Clustering. IEEE Access 2019, 7, 86041–86053. [Google Scholar] [CrossRef]
- Fan, X.; Xu, G.; Lin, W.; Wang, X.; Chang, L. Target Segmentation Method for Three-Dimensional Lidar Point Cloud Based on Depth Image. Chin. J. Lasers 2019, 46, 292–299. [Google Scholar] [CrossRef]
- Zheng, L.; Zhang, P.; Tan, J.; Li, F. The Obstacle Detection Method of UAV Based on 2D Lidar. IEEE Access 2019, 7, 163437–163448. [Google Scholar] [CrossRef]
- Qi, C.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Qi, C.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep Hierarchical Feature Learning on Point Sets in A Metric Space. Adv. Neural Inf. Process. Syst. 2017, 30, 5099–5108. [Google Scholar] [CrossRef]
- Shi, S.; Wang, X.; Li, H. PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Fan, J.; Wang, L.; Chu, W.; Luo, Y. Research on Pedestrian Recognition in Cross-Country Environment Based on KDTree and Euclidean Clustering. Automot. Eng. 2019, 41, 1410–1415. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision Meets Robotics: The Kitti Dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.-Q.; Zheng, P.; Xu, S.-T.; Wu, X. Object Detection with Deep Learning: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, X.; Zhang, Z.; Qin, Y. On-Road Object Detection and Tracking Based on Radar and Vision Fusion: A Review. IEEE Intell. Transp. Syst. Mag. 2022, 14, 103–128. [Google Scholar] [CrossRef]
- Zhao, C.; Fu, C.; Dolan, J.M.; Wang, J. L-Shape Fitting-Based Vehicle Pose Estimation and Tracking Using 3D-Lidar. IEEE Trans. Intell. Veh. 2021, 6, 787–798. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Number |
|---|---|
| VLP-16 lidar | 3 |
| Camera | 1 |
| Millimeter wave radar | 4 |
| GPS/INS | 1 |
| Ultrasonic radar | 12 |
| Gyro Sensor | 1 |
| VBOX | 1 |
| Precision | Recall | F1 Score | |
|---|---|---|---|
| Proposed method | 0.9577 | 0.9326 | 0.9449 |
| Euclidean method | 0.9030 | 0.8618 | 0.8820 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, W.; Song, C.; Wang, H.; Yu, M.; Yan, Y. Obstacle Detection by Autonomous Vehicles: An Adaptive Neighborhood Search Radius Clustering Approach. Machines 2023, 11, 54. https://doi.org/10.3390/machines11010054
Jiang W, Song C, Wang H, Yu M, Yan Y. Obstacle Detection by Autonomous Vehicles: An Adaptive Neighborhood Search Radius Clustering Approach. Machines. 2023; 11(1):54. https://doi.org/10.3390/machines11010054
Chicago/Turabian StyleJiang, Wuhua, Chuanzheng Song, Hai Wang, Ming Yu, and Yajie Yan. 2023. "Obstacle Detection by Autonomous Vehicles: An Adaptive Neighborhood Search Radius Clustering Approach" Machines 11, no. 1: 54. https://doi.org/10.3390/machines11010054