1. Introduction
A collaborative robot, or cobot, is designed for direct human–robot collaboration (HRC) or contact in a shared area or when people and robots are close to each other. In contrast to conventional industrial robot operations, which keep robots away from people, cobot applications allow for human interaction [
1]. Cobot safety may depend on soft edges, low-weight materials, speed and force limitations built-in, or sensing devices and programming that enforce safe and positive behavior [
2,
3]. There are two main categories of robots recognized by the International Federation of Robots (IFR): industrial or automated robots, which are used in automation processes in an industrial environment [
4], and service robots, used for personal and business purposes. The service robots are designed to collaborate or work with human beings and are categorized as cobots [
5]. Cobots eliminate the divide that has historically existed between industrial robots and humans while they work within fences or any other security barriers [
6]. Cobots can be used for a variety of tasks, from communication robots in public areas and logistic or supply chain robots that move materials inside a building [
7], to articulated or industrial robots that assist in automating tasks which are not ergonomically sound, such as assisting individuals in carrying large parts, or assembly lines. They are designed to fill the gap between completely automated industrial processes and manual system functioning, providing the advantages of automation without adding to the complexities of a completely robotic testing regime. Cobots are also well suited for application in the biomedical sector, where increasing automation is frequently impractical, yet lab productivity, security, and information protection are crucial [
8].
The four stages of interaction involved between robots and humans are defined by the IFR [
9]:
Coexistence: there is no common office, yet humans and robots coexist side by side without a boundary.
Human and robot activity occurs in a shared workspace, but their movements are sequential; they do not simultaneously work on a component.
Cooperation: while both are in movement, a robot and a person work simultaneously on the same component.
Responsive collaboration: the robots react instantly to human worker movement.
In the majority of current industrial cobot applications, a human operator and a cobot coexist in the same location but carry out separate or consecutive duties. Human faith in collaboration has increased through HRC applications built with dependability and safety in mind, which also enhances employee performance and working circumstances [
10]. Robots and humans work together in the same location during HRC. Cobots are designed to stop before any unintentional contact with a human teammate could be harmful. Additionally, cobots should be lightweight in order to reduce their inertia and enable abrupt stops. Certain cobots may even be taught to perform tasks in logistical operations by having other individuals direct their arms once to make the motion. This shortens the programming procedure and expedites the personalized packing process. The use of robotics in logistics and transportation is growing quickly [
11].
A cobot was estimated to cost an average of approximately
$28,000 in 2015, but by 2025, that price is predicted to plummet to an unexpectedly low average of approximately
$17,500. The market for collaborative robots was assessed at USD 1.01 billion in 2021, and is anticipated to increase at a compound annual growth rate of 31.5% from 2022 to 2030.
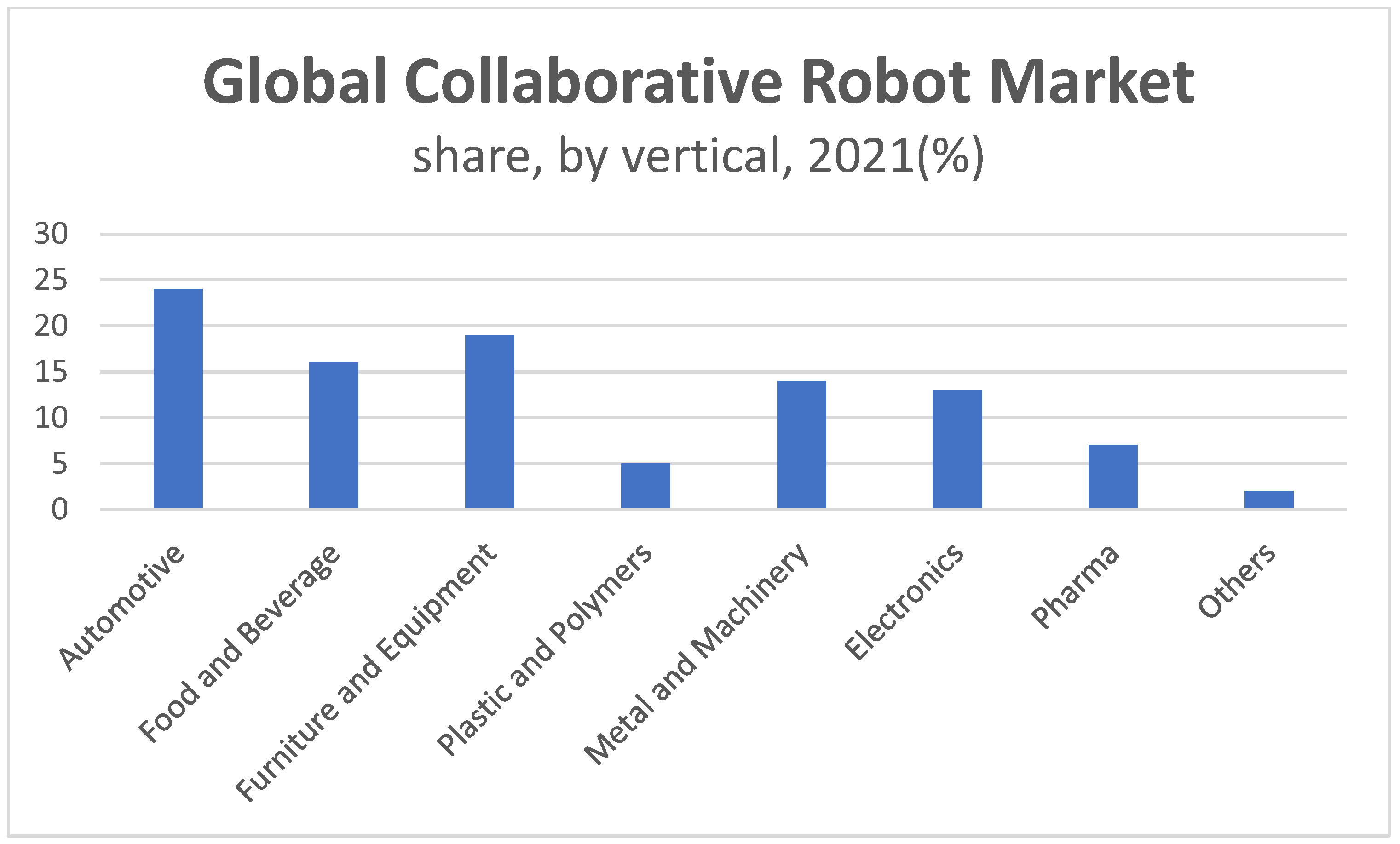
Figure 1 shows the global collaborative robot market in 2021 [
12].
According to
Figure 1, more than 24% of the market in 2021 belonged to the automotive sector, which is predicted to increase significantly over the next five years. Due to their capacity to save on floor space and the expense of production downtime, collaborative robot usage has expanded, which is significantly responsible for the expansion. They also play a significant role in other processes, such as spot and arc welding, component assembly, painting, and coating. Innovations that support weight reduction, cost-efficiency, and low production overheads will be combined with the introduction of new chemicals and metals to lead the automotive sector.
Artificial intelligence (AI) and robotics have made it possible to find creative answers to the problems encountered by companies of all sizes across industries. Robots powered by AI are being used by industries to bridge the gap between humans and technology, solve issues, and adapt business strategies to changing customer expectations. Robots with AI capabilities operate in shared environments to keep employees safe in industrial workplaces. Additionally, they work independently to complete complicated operations such as cutting, grinding, welding, and inspection. Machine learning is essential to the ability of AI robots to learn and improve over time at performing tasks. Robots that employ machine learning can create new learning ways and competencies by using contextual knowledge learned through experience and real-time data. This enables the robots to address novel and unusual issues as they arise in their contexts. The most sophisticated type of machine learning is called deep learning, and like neural networks, it deals with algorithms that are motivated by the structure and operation of the brain. Deep learning, which is essentially a “deep” neural network, gets its name from the abundance of layers, or “depth.” Given that deep learning demands truly enormous quantities of computing power and data, it is a future objective rather than something that can be achieved now for cobots. The more of each it has, the better it will function.
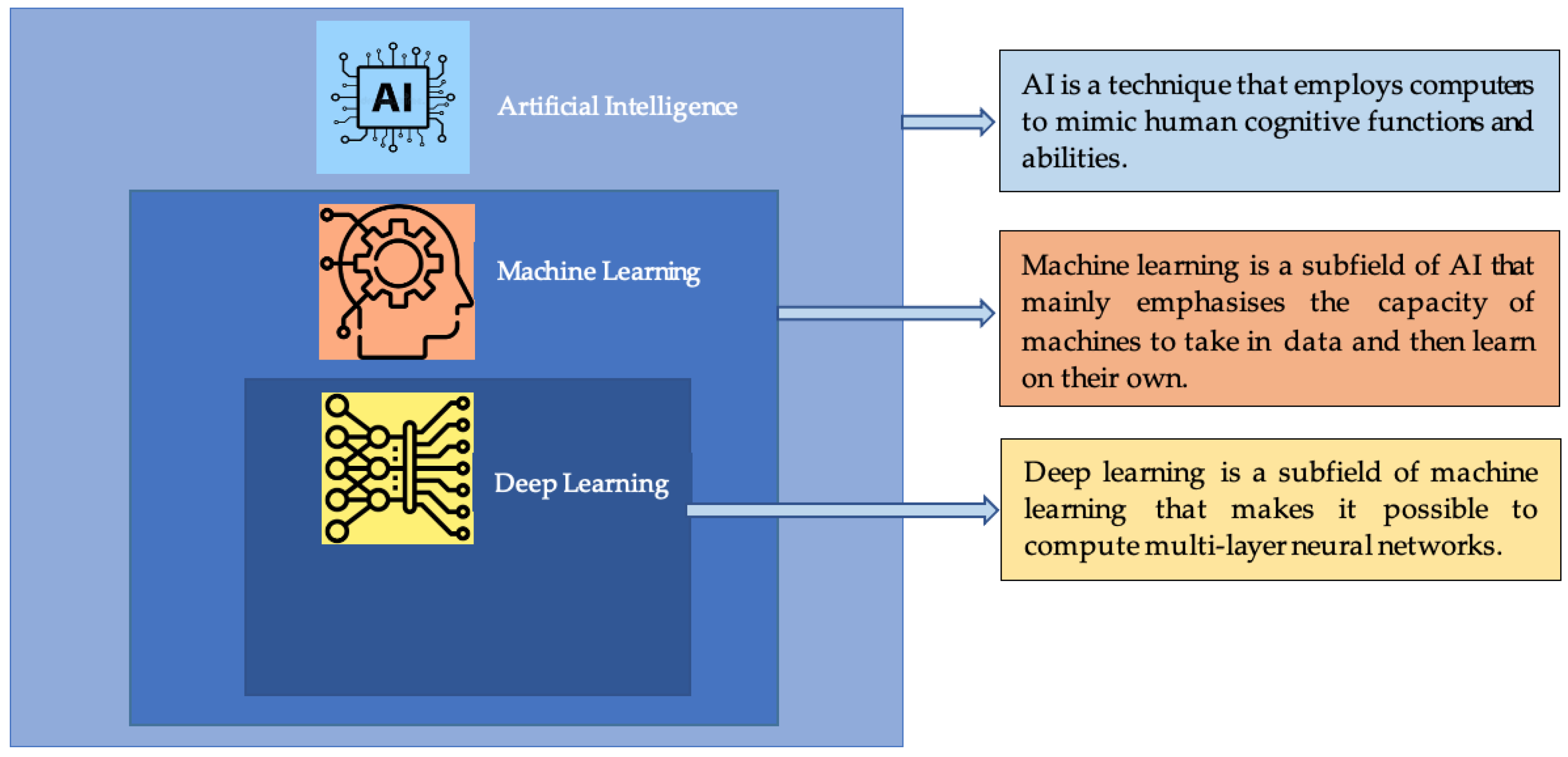
Figure 2 shows the relationship between AI, machine learning, and deep learning.
It can be interpreted from
Figure 2 that machine learning is a sub-category of AI, and deep learning is a sub-category of machine learning, meaning they are both forms of AI. AI is the broad idea that machines can intelligently execute tasks by mimicking human behaviors and thought processes. Several recent review articles [
4,
13,
14,
15] were evaluated and it was found that although article [
4] provided a good analysis of machine learning techniques and their industrial applications from the perspective of flexible collaborative robots, some of the recent works of 2022 were not covered. The application of only machine learning techniques in the context of HRC has been reviewed in the literature [
13] where it emphasized the need of including time dependencies in machine learning algorithms. Article [
14] covered five articles only until 2021 where it focused on control techniques for safe, ergonomic, and efficient HRC in industries. The role of AI in the development of cobots was not addressed in this article. Article [
15] mainly focused on smart manufacturing architectures, communication technology, and protocols in the deployment of machine learning algorithms for cooperative tasks between human workers and robots. This article did not cover the deep learning techniques that are providing advanced learning approaches for cobots. As it was published in 2021, it did not include up-to-date research and only related articles until 2021 were cited.
There is growing interest in creating a collaborative workspace where people and robots can work cooperatively because of the supportive nature of their abilities. These diverse elements of the industrial sector’s dynamic nature and the existing deficiencies in analyses serve as a high impetus for the development of AI-based HRC. Hence, this paper aims to precisely respond to the following research questions:
- ○
What have researchers found in the literature on the expanding role of AI on cobots?
- ○
Will the implementation of AI on cobots be able to reduce previous concerns about industrial applications and contribute to better performance?
It is easy to identify areas where there are gaps that need to be addressed by future efforts by reviewing the existing literature. As a result, the objectives of the research are addressed in the following manner:
- ○
to research the key distinctions between robots and cobots
- ○
to research the common characteristics and capacities of robots
- ○
to discuss the various levels of industrial situations including robots, the role of AI, and collaboration
The main contribution of this research is to examine the interactions and influence between AI and collaborative robots (cobots) about human elements and contemporary industrial processes. Apart from machine learning and deep learning methods, recent works about the role of vision systems that employ deep learning for cobots have been specifically included. A literature study is selected as an appropriate method to determine the association between one (or more) of the mentioned aspects to achieve this purpose. However, details regarding safety concerns over the cobots’ ability to accurately recognize human emotions and hand movements were not included.
The paper is organized as follows. The methodology presents how the review was carried out in
Section 2. This is followed by the discussion on the findings in
Section 3. Then, a discussion on the collected data is shown in
Section 4 and recommendations and future directions are provided in
Section 5. Conclusions are drawn in
Section 6.
2. Methodology
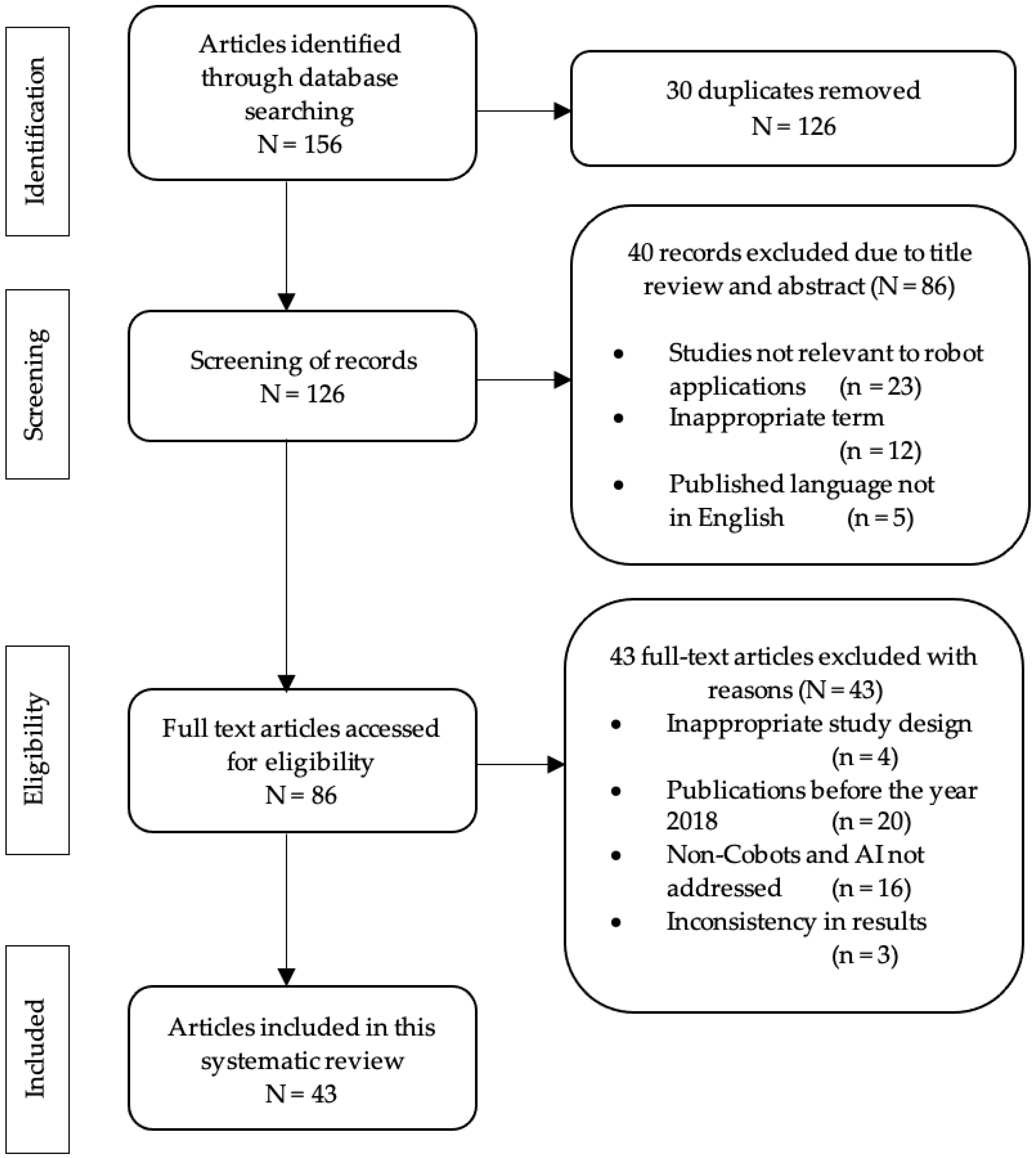
The understanding and evaluation of the methodologies used are aided by a precise, well-described structure for systematic reviews. As a result, the preferred reporting items for the systematic review and meta-analysis (PRISMA) model was used in this research. The PRISMA model, as illustrated in
Figure 3, depicts the flow of information from one stage to the next in a systematic review of the literature, including the total number of studies identified, excluded, and included, as well as the reasons for inclusion and exclusion. The databases Web of Science, IEEEXplore, PubMed, ScienceDirect, SpringerLink, Scopus, and Research Gate, were examined for the literature search on collaborative robots using the following key words: human–robot interaction (HRI), cobots, AI in robots, collaborative learning, HRC, reinforcement learning, deep learning in robotics, industrial robots. Peer-reviewed academic journals, conference papers, and reviews published since 2018 and written in English, and those that contain qualitative or quantitative information or both, were included in this systematic review.
From
Figure 3, we have initially identified 156 articles related to collaborative robots and applications through database searching. Out of 156 articles, 30 duplicate papers were removed. By screening the remaining 126 papers, 40 records were excluded by reviewing the title and abstract. A total of 86 full-text articles were considered for eligibility, of which 43 articles were excluded for various reasons, such as inappropriate study design (flawed or underdeveloped design that produced low-quality results and makes research unreliable), publications before the year 2018, not relevant to cobots, AI techniques not addressed in their study, and inconsistency in results (the results were not the same through the manuscript). Finally, we included 43 full-text articles that were published between 2018 and 2022 to review. The discussion of the findings is provided in the following sub-sections.
4. Discussion
Robots are now able to collaborate closely with people thanks to new technology. In the previous two decades, there existed a wall separating the human workspace from where the robot was located. In the next five years, this will change because the robot will be capable of coexisting with humans in our living environments, including our homes, workplaces, and industries, and they will be ready to do so safely and securely. A new generation of robots that have sensing elements all over them, meaning their joints are independently operated, have started to appear in the last five years. As a result, if a person approaches a robot and touches it, the robot will halt as it would recognize that a person is nearby. The collision rate has been successfully decreased and the success rate has been improved with reinforcement learning comparatively without RL [
63]. The work time for a robot is more than that of a human. According to Weiss et al. [
64], there are presently just a few areas where cobots are used in the workplace. Cobots have not yet effectively overtaken career opportunities; rather, their use has been focused on automating simple parts of team projects. Even though robots excel at routine and tedious jobs, human workers still manage unexpected and unscheduled duties better than their computerized coworkers. In a way, people continue to be the system’s most adaptable resource. HRC may be superior to solely robotic processes by utilizing the heterogeneous benefits.
The preceding section discussed the findings in five different tables (
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6). In
Table 2, the discussion on the related works with the non-collaborative workspace-type robots with five articles shows that only a few of the studies that implemented cobots were not able to carry out the collaborative tasks due to safety concerns. For non-collaborative tasks, AI was employed where performance in terms of effectiveness and efficiency has improved.
Table 3, which discussed 17 articles, provided a summary of the state-of-art research on collaborative workspace-type robots, where a lot of research has been carried out in making the robots do collaborative tasks of numerous kinds for industrial application. All studies employed AI methods, such as deep learning and reinforcement learning, for the design of cobots in performing several industrial activities with improved execution. The summary of the state-of-art research on industrial robots employing machine learning in
Table 4 with four articles shows that the implementation of collaborative workspace robots by utilizing machine learning techniques is showing better output.
Table 5 with the summary of cobot-related works without AI with five articles has shown the poor quality of performance in their output. The summary of the state-of-art research on vision systems employed in cobots with 10 articles is provided in
Table 6. It shows the influence of deep learning on improving performance.
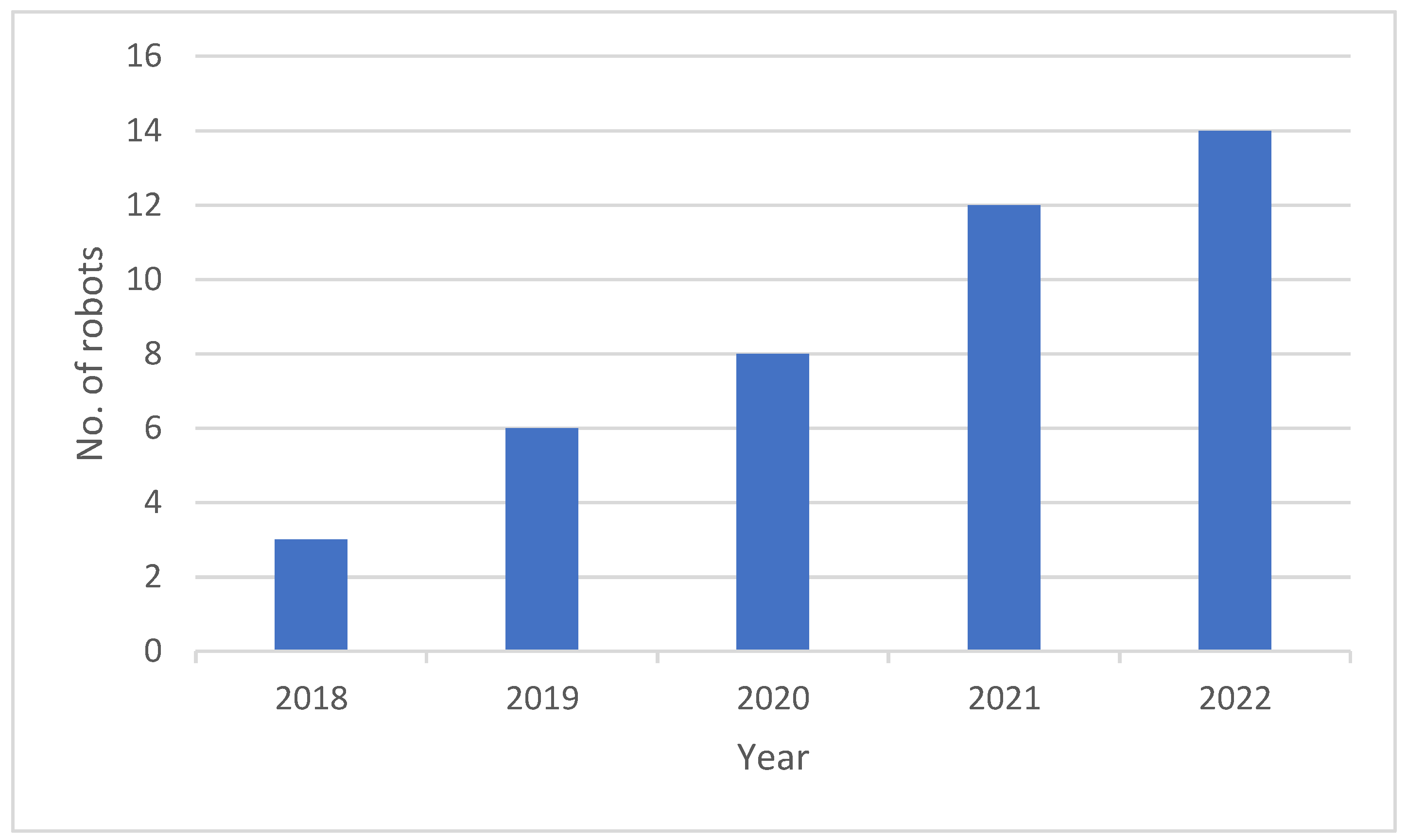
From
Figure 5, the use of robots in collaborative research work has been increasing between 2018 and 2022. Cobots provide robustness, reliability, and data analytical skills to adaptable and collaborative technology, enhancing human abilities and contributing positively to the cobot’s enterprise customers.
The tasks performed by the robot in collaborative research works are given in
Figure 6.
According to
Figure 6, most studies utilized collaborative robots to perform the assembly tasks followed by pick and place tasks. The development of cobots is aimed at sharing a workstation with people in order to improve a workflow (co-existence) and scalable automation for different activities with human involvement (collaboration). Nevertheless, in any kind of task human behavior can be unexpected, making it challenging for robotics to interpret a person’s intentions. Therefore, it is still difficult for some people and robots to work together in industry sectors.
From the analysis of the literature, it can be safely stated that quite a number of recent articles have shown the expanding role of AI on cobots. In addition, the implementation of AI on cobots has resulted in better performance as clearly stated in
Section 3.
5. Recommendations and Future Directions
The published research shows that the investigations have mostly concentrated on a particular set of fixed tasks. For dynamic circumstances with several kinds of tasks, an in-depth study is lacking. Additionally, such collaboration techniques depend on static feature-based techniques or robots that are controlled by humans. Most of the decisions are still made by the supervisor, who is still a human being, and thus the robots providing services are not cognitive. To execute the activities effectively and safely, it can be difficult to develop healthy cooperation between robots and workers. Although, if any of the commands are incorrect or missed, the cobot likely will not be able to complete the task successfully on time. In this instance, assistance from a human worker is needed, which calls for the person to be aware of the cobot’s prior activities [
47].
Existing deep learning techniques are not time-efficient and do not offer the essential adaptability for cobots in complicated circumstances, in which real-time robotic application is not possible. It is required to make strides in several areas, notably online deep learning for dispersed teams of cobots and human operators communicating with one another, to bring up the data-driven control systems to the next generation level. The exchange of knowledge regarding prior actions and experiences across numerous cobots is not taken into account by current technologies in order to enhance and speed up learning. To ensure each cobot will learn from both its own and the experiences of other cobots, necessitates unique distributed sensor signal processing and data aggregation across the numerous wirelessly networked robots.
The degree of autonomy in robots has recently been increased in the industrial and service sectors by using machine learning methods, which have seen a growing success rate. Most significantly, techniques utilizing reinforcement learning or learning from demonstration have produced impressive outcomes, such as training robots to carry out difficult tasks by examining the range of potential behaviors in the environment or following human instructors. However, the application of these strategies in automated robotic coding is constrained.
Reinforcement learning successfully automates the trial-and-error method by enabling the robots to continuously interact with their surroundings, which is not possible during the normal operating stage of an actual production unit. In simulated situations, RL necessitates highly precise and computationally costly simulators, so reconciling the associated gap between the simulation model and reality is regarded as an unanswered problem.
The sophisticated machine-vision methods with the use of deep learning enable cobots to have a highly developed sense of perception and knowledge of their surroundings. With these capabilities, these advanced robots can operate more safely and effectively in specific types of workplaces due to their enhanced visibility.
5.1. Advanced Autonomous Algorithms
For cobots to fully realize their enormous potential for manufacture in high-mix, low-volume production situations, cutting-edge algorithms are required. Cobots should be capable of operating without clear instructions in new circumstances. In situations where its surroundings are well known, the cobot’s movement planning algorithm enables it to reach a position of the object, while collision-avoiding algorithms enable responsive behavior in environments where its surroundings are dynamic. These algorithms rely on the contextual information supplied by the cobot’s sensors as it moves.
5.2. Safety Devices
It is imperative to understand, create, and verify an environment where the cobot can perform its tasks and safely coexist with humans. Several ISO-regulated requirements must be fulfilled aiming to create a stable and safe environment, such as safety-rated stop monitoring, hand guiding (teaching by demonstration), speed and separation monitoring, power and force limiting, and so on.
A technical challenge to the wider usage of robots is safety barriers. Cobots are created to meet safety standards with inherent safety designs that permit the cobot to communicate safely with human beings and handle things carefully in its workplace. Cobots incorporate adaptive elements, namely joint torque sensors, to absorb the force of unintended hits, reducing the momentum exposed to possible accidents. The development of cobots also makes use of a wide range of external sensing devices (vision systems) such as cameras, lasers, depth sensors, and so on, fusing the data obtained to enable accurate vicinity and action recognition between humans and robots.
The majority of cobots integrate the following security features, among others: firstly, when a robot detects a human entering its functional workspace, it immediately stops moving. This is known as safety-rated stop monitoring. To recognize the presence of people, it is frequently implemented by utilizing one or more sensors. Secondly, it has a hand-guiding capability that enables a human to securely train the robot to adhere to a predetermined operating trajectory. In the event of an unexpected touch, the robot will immediately decrease its force to avoid hurting the human. The safety and health of people working with robotics have been a topic of active research in recent years, and progress has been made.
6. Conclusions
It was found that based on our review of the state-of-the-art publications, various cobots have been widely applied in various areas. These areas include communication robots in public areas. These logistic or supply chain robots move materials inside a building and articulated or industrial robots assist in automating tasks that are not ergonomically sound, such as assisting individuals in carrying large parts, or assembly lines. Since the cobot and robot can both undertake similar tasks, the differences between the two approaches were demonstrated to highlight their usage and to show which is better than the other in certain scenarios. The advantages and disadvantages of cobots were discussed. Several metrics can affect the performance of the cobot, including different sensing, preprocessing techniques, and control methods. This work presents an overview of robot and cobot types, sensing or simulation tools, the task and where it can be achieved, and the types of control technology based on AI. Many reviewed studies implemented machine learning and deep learning techniques for managing the cobot task. In addition, this review discussed the outcomes of the selected papers, including the accuracy, safety issue, time delay, training process, and robot ability. Finally, this systematic review provided recommendations and future direction for the interaction between the cobot and the ever-advancing AI domain.

 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}