
A Compatible Design of a Passive Exoskeleton to Reduce the Body–Exoskeleton Interaction Force


Abstract
:1. Introduction
2. The Dynamics of Body–Exoskeleton Coupling System
2.1. The Kinematics and Dynamics of Exoskeleton System
2.2. The Analysis of Body–Exoskeleton Interaction Force
2.3. The Redistribution of Body–Exoskeleton Interaction Force
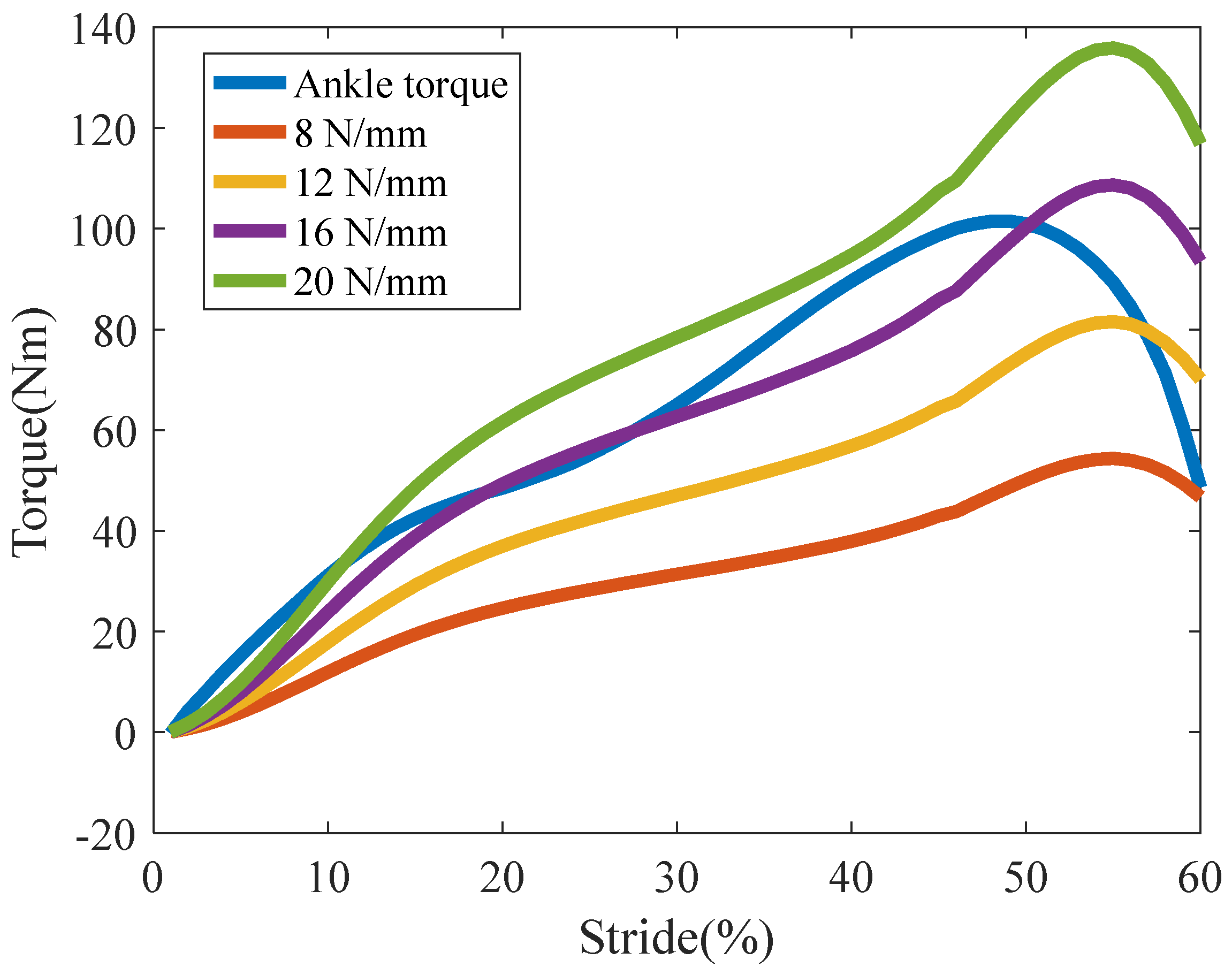
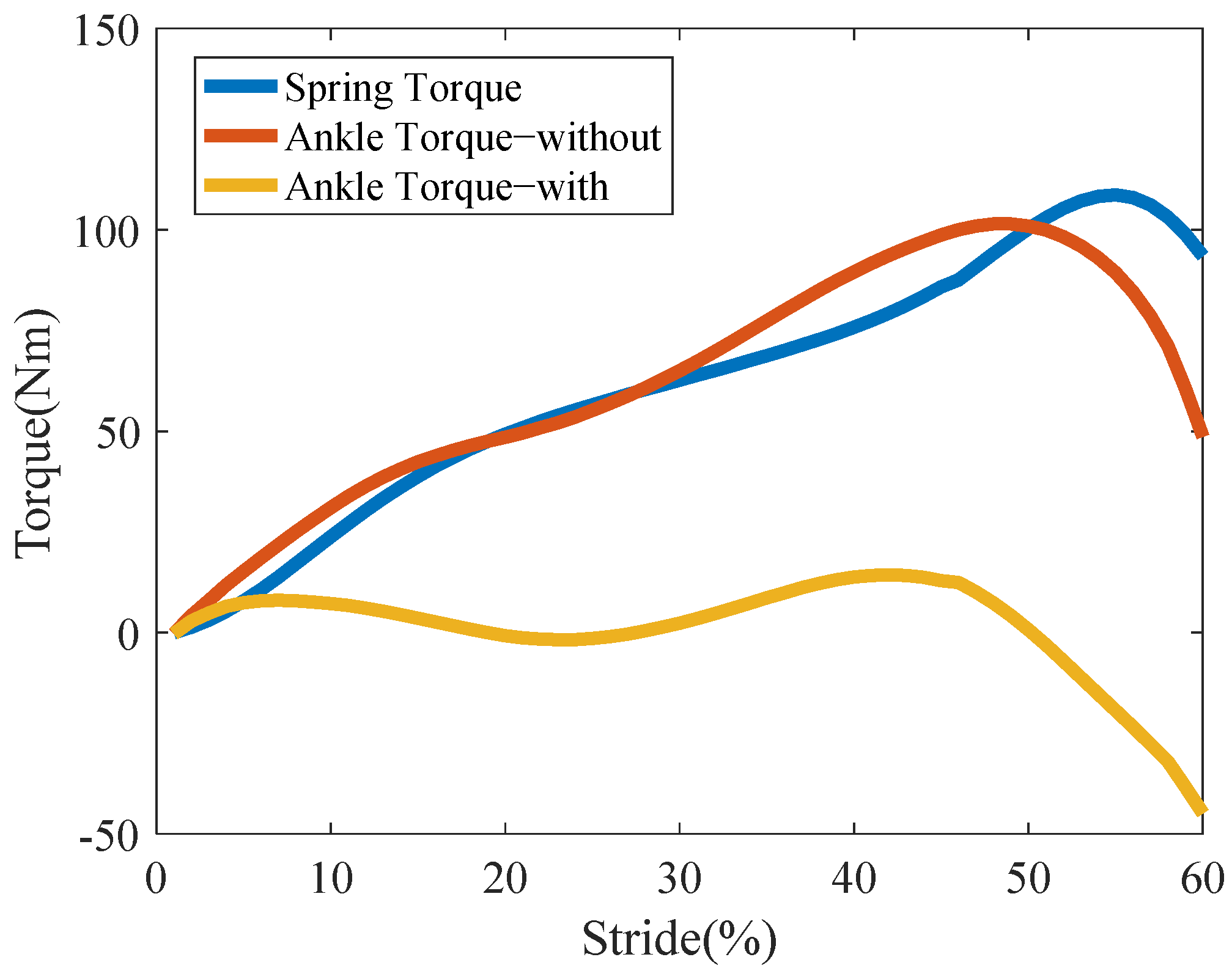
2.4. The Simulation of Body–Exoskeleton Interaction Force
3. The Design of Exoskeleton Prototype and Experiments
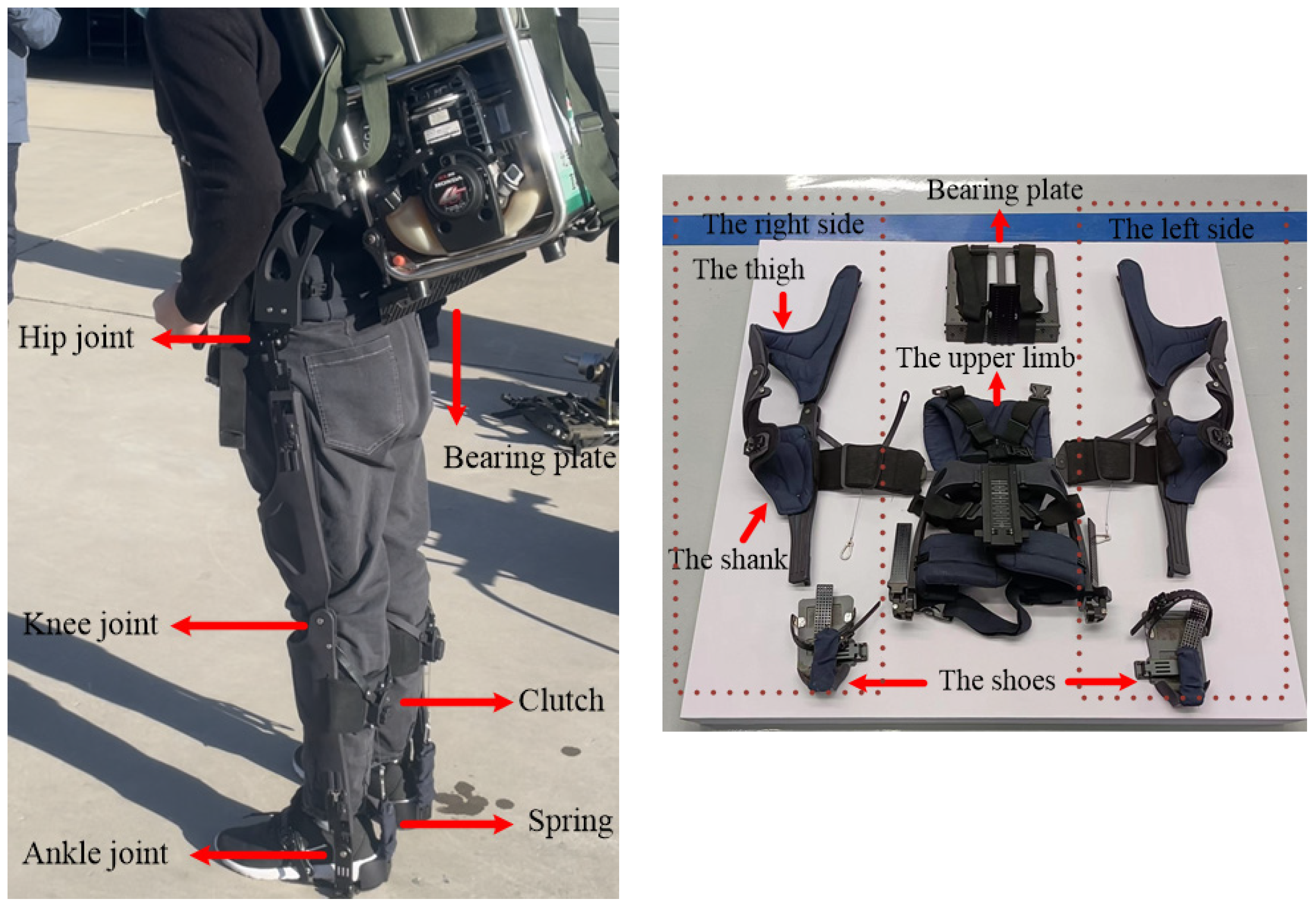
3.1. The Design of the Exoskeleton
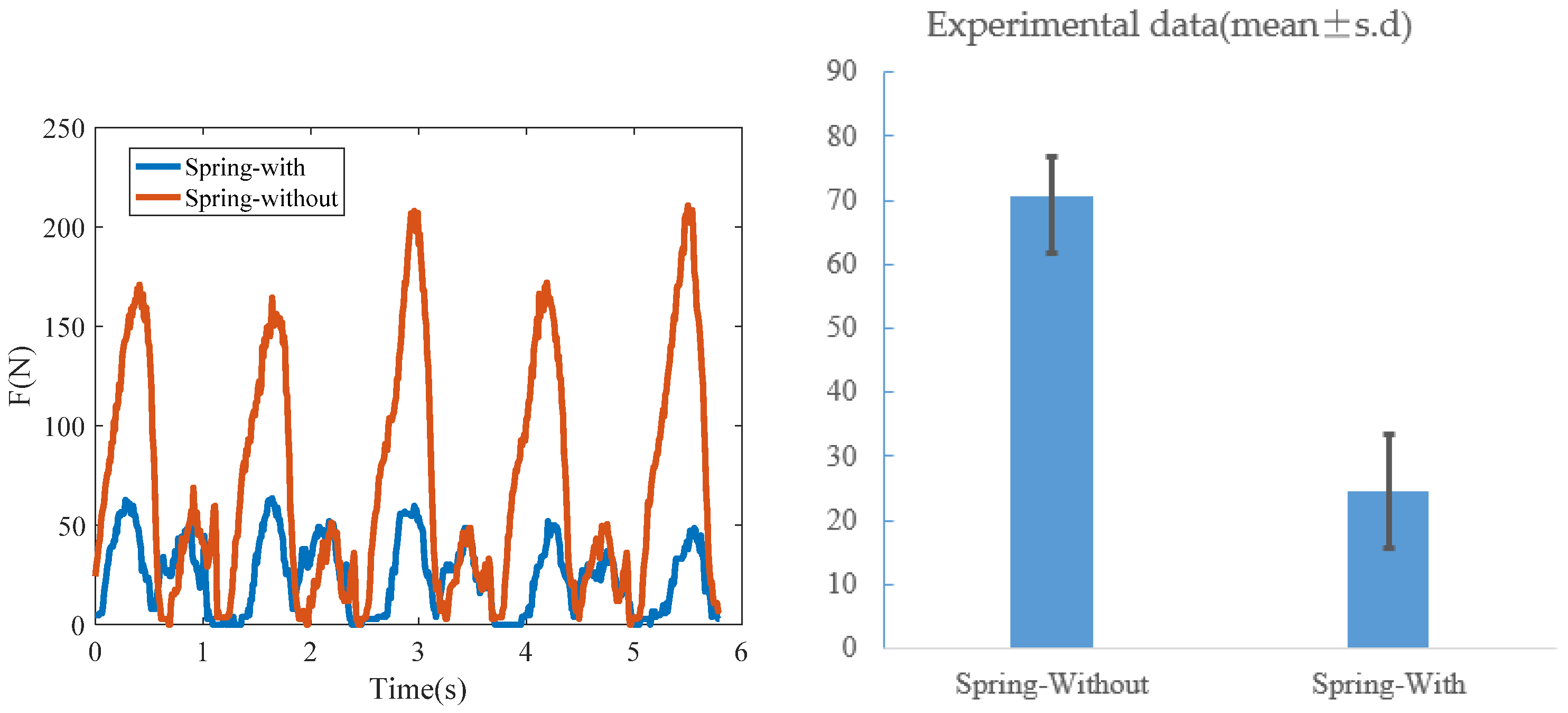
3.2. Experiment
3.3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- De Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Mihelj, M.; Nef, T.; Riener, R. ARMin II-7 DoF rehabilitation robot: Mechanics and kinematics. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 4120–4125. [Google Scholar]
- Kim, S.; Nussbauma, M.A.; Esfahania, M.I.M.; Alemi, M.M.; Jia, B.; Rashedi, E. Assessing the influence of a passive, upper extremity exoskeletal vest for tasks requiring arm elevation: Part I—“Expected” effects on discomfort, shoulder muscle activity, and work task performance. Appl. Ergon. 2018, 70, 315–322. [Google Scholar] [CrossRef] [PubMed]
- Yan, T.; Cempini, M.; Oddo, C.M.; Vitiello, N. Review of assistive strategies in powered lower-limb orthoses and exoskele-tons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Giovacchini, F.; Vannetti, F.; Fantozzi, M.; Cempini, M.; Cortese, M.; Parri, A.; Yan, T.; Lefeber, D.; Vitiello, N. A light-weight active orthosis for hip movement assistance. Robot. Auton. Syst. 2015, 73, 123–134. [Google Scholar] [CrossRef]
- Li, J.; Zuo, S.; Xu, C.; Zhang, L.; Dong, M.; Tao, C.; Ji, R. Influence of a Compatible Design on Physical Human-Robot Interaction Force: A Case Study of a Self-Adapting Lower-Limb Exoskeleton Mechanism. J. Intell. Robot. Syst. 2019, 98, 525–538. [Google Scholar] [CrossRef]
- Jarrasse, N.; Morel, G. Connecting a Human Limb to an Exoskeleton. IEEE Trans. Robot. 2012, 28, 697–709. [Google Scholar] [CrossRef] [Green Version]
- Leboucher, J.; Lempereur, M.; Burdin, V.; Remy-Neris, O. Radius movement simulation based on articular surfaces. In Proceedings of the International Conference on Computational Systems-Biology and Bioinformatics, Bangkok, Thailand, 3–5 November 2010. [Google Scholar]
- Lee, S.; Kim, J.; Baker, L.; Long, A.; Karavas, N.; Menard, N.; Galiana, I.; Walsh, C.J. Autonomous multi-joint soft exosuit with augmentation-power-based control parameter tuning reduces energy cost of loaded walking. J. Neuroeng. Rehabil. 2018, 15, 66. [Google Scholar] [CrossRef]
- Ding, Y.; Galiana, I.; Asbeck, A.T.; De Rossi, S.M.M.; Bae, J.; Santos, T.R.T.; De Araujo, V.L.; Lee, S.; Holt, K.G.; Walsh, C. Biomechanical and Physiological Evaluation of Multi-Joint Assistance with Soft Exosuits. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 119–130. [Google Scholar] [CrossRef]
- Pérez Vidal, A.F.; Rumbo Morales, J.Y.; Ortiz Torres, G.; Sorcia Vázquez, F.d.J.; Cruz Rojas, A.; Brizuela Mendoza, J.A.; Rodríguez Cerda, J.C. Soft Exoskeletons: Development, Requirements, and Challenges of the Last Decade. Actuators 2021, 10, 166. [Google Scholar] [CrossRef]
- Schiele, A. An ex-plicit model to predict and interpret constraint force creation in pHRI with exoskeletons. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1324–1330. [Google Scholar]
- Lamoreux, L.W. Kinematic measurements in the study of human walking. Bull. Prosthet. Res. 1971, 10, 3–84. [Google Scholar] [PubMed]
- Markolf, K.L.; Mensch, J.S.; Amstutz, H.C. Stiffness and laxity of the knee-The contributions of the supporting structures, a quantitative in vitro study. J. Bone Jt. Surg. Amer. 1976, 58, 583–594. [Google Scholar] [CrossRef]
- Olivier, J.; Bouri, M.; Ortlieb, A.; Bleuler, H.; Clavel, R. Development of an assistive motorized hip orthosis: Kinematics analysis and mechanical design. IEEE Int. Conf. Rehabil. Robot. 2013, 2013, 6650495. [Google Scholar] [PubMed]
- Sergi, F.; Accoto, D.; Tagliamonte, N.L.; Carpino, G.; Pathiyil, L.; Guglielmelli, E. A systematic graph-based method for the kinematic synthesis of non-anthropomorphic wearable robots for the lower limbs. In Proceedings of the 2010 IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 28–30 June 2010; pp. 100–105. [Google Scholar]
- Banala, S.K.; Kim, S.H.; Agrawal, S.K.; Scholz, J.P. Robot assisted gait training with active leg exoskeleton (ALEX). IEEE Trans. Neural Syst. Rehabil. 2009, 17, 2–8. [Google Scholar] [CrossRef] [PubMed]
- Walsh, C.J.; Endo, K.; Herr, H. A quasi-passive leg exoskeleton for load-carrying augmentation. Int. J. Hum. Robot. 2007, 4, 487–506. [Google Scholar] [CrossRef]
- Schiele, A.; van der Helmb, F.C.T. Influence of attachment pressure and kinematic configuration on pHRI with wearable robots. Appl. Bionics Biomech. 2009, 6, 157–173. [Google Scholar] [CrossRef] [Green Version]
- Jarrasse, N.; Tagliabue, M.; Robertson, J.V.G.; Maiza, A.; Crocher, V.; Roby-Brami, A.; Morel, G. A Methodology to Quantify Alterations in Human Upper Limb Movement During Co-Manipulation with an Exoskeleton. IEEE Trans. Neural Syst. Rehabil. 2010, 18, 389–397. [Google Scholar] [CrossRef] [Green Version]
- Zoss, A.; Kazerooni, H.; Chu, A. On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX). In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3465–3472. [Google Scholar]
- Kawamoto, H.; Sankai, Y. Power assist method based on Phase Sequence and muscle force condition for HAL. Adv. Robot. 2005, 19, 717–734. [Google Scholar] [CrossRef]
- Qi, Z.; Liu, Y.; Song, Q.; Zhou, N. An Improved Greedy Reduction Algorithm Based on Neighborhood Rough Set Model for Sensors Screening of Exoskeleton. IEEE Sens. J. 2021, 21, 26964–26977. [Google Scholar] [CrossRef]
- Gao, F.; Pan, D. Mechanical Design of a Hybrid Leg Exoskeleton to Augment Load-Carrying for Walking. Int. J. Adv. Robot. Syst. 2013, 10, 395. [Google Scholar]
- Yu, S.; Lee, H.; Kim, W.; Han, C. Development of an underactuated exoskeleton for effective walking and load-carrying assist. Adv. Robot. 2016, 30, 535–551. [Google Scholar] [CrossRef]
- Chen, S.; Han, T.; Dong, F.; Lu, L.; Liu, H.; Tian, X.; Han, J. Precision Interaction Force Control of an Underactuated Hydraulic Stance Leg Exoskeleton Considering the Constraint from the Wearer. Machines 2021, 9, 96. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, G.; Han, B.; Wu, L.; Li, H. Design of a Human Lower Limbs Exoskeleton for Biomechanical Energy Harvesting and Assist Walking. Energy Technol. 2020, 9, 2000726. [Google Scholar] [CrossRef]
- Capitani, S.L.; Bianchi, M.; Secciani, N.; Pagliai, M.; Meli, E.; Ridolfi, A. Model-based mechanical design of a passive lower-limb exoskele-ton for assisting workers in shotcrete projection. Meccanica 2021, 56, 195–210. [Google Scholar] [CrossRef]
- Yan, Z.; Han, B.; Du, Z.; Huang, T.; Bai, O.; Peng, A. Development and testing of a wearable passive lower-limb support exoskeleton to support industrial workers. Biocybern. Biomed. Eng. 2021, 41, 221–238. [Google Scholar] [CrossRef]
- Zhou, N.; Liu, Y.; Song, Q.; Qi, Z.; Ren, W.; Zhang, K. Analysis, design and preliminary evaluation of an anthropometric self-stabilization passive exoskeleton for enhancing the ability of walking with loads. Robot. Auton. Syst. 2022, 153, 09218890. [Google Scholar] [CrossRef]
- Hidayah, R.; Sui, D.; Wade, K.A.; Chang, B.-C.; Agrawal, S. Passive knee exoskeletons in functional tasks: Biomechanical effects of a SpringExo coil-spring on squats. Wearable Technol. 2021, 2, e7. [Google Scholar] [CrossRef]
- Karfidova, A.O.; Vasilyev, M.V.; Morozova, I.G. Modernization of an industrial passive exoskeleton prototype for lower ex-tremities using rapid prototyping technologies. Mater. Sci. Eng. 2020, 971, 052049. [Google Scholar]
- Rajagopal, A.; Dembia, C.; DeMers, M.; Delp, D.D.; Hicks, J.L.; Delp, S.L. Full-Body Musculoskeletal Model for Muscle-Driven Simulation of Human Gait. IEEE Trans. Biomed. Eng. 2016, 63, 2068–2079. [Google Scholar] [CrossRef]
- Wang, H. Anatomy of the Human System; Fudan University Press: Shanghai, China, 2008. [Google Scholar]
- Celebi, B.; Yalcin, M.; Patoglu, V. Assist ON-Knee: A self-aligning knee exoskeleton. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Xie, Q.; Meng, Q.; Zeng, Q.; Fan, Y.; Dai, Y.; Yu, H. Human-Exoskeleton Coupling Dynamics of a Multi-Mode Therapeu-tic Exoskeleton for Upper Limb Rehabilitation Training. IEEE Access 2021, 9, 61998–62007. [Google Scholar] [CrossRef]
- Kirtley, C. CGA Normative Gait Database; Hong Kong Polytechnic University: Hong Kong, China, 2005. [Google Scholar]
- Chen, B.; Zi, B.; Zeng, Y.; Qin, L.; Liao, W.-H. Ankle-foot orthoses for rehabilitation and reducing metabolic cost of walking: Possi-bilities and challenges. Mechatronics 2018, 53, 241–250. [Google Scholar] [CrossRef]
- Han, Y.; Wang, X. The biomechanical study of lower limb during human walking. Sci. China Technol. Sci. 2011, 54, 983–991. [Google Scholar] [CrossRef]
- Panizzolo, F.A.; Galiana, I.; Asbeck, A.T.; Siviy, C.; Schmidt, K.; Holt, K.G.; Walsh, C.J. A biologically-inspired multi-joint soft exosuit that can reduce the energy cost of loaded walking. J. Neuroeng. Rehabil. 2016, 13, 43. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- van Dijk, W.; van der Kooij, H.; Hekman, E. A Passive Exoskeleton with Artificial Tendons: Design and experimental evaluation. IEEE Int. Conf. Rehabil. Robot. 2011, 2011, 5975470. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
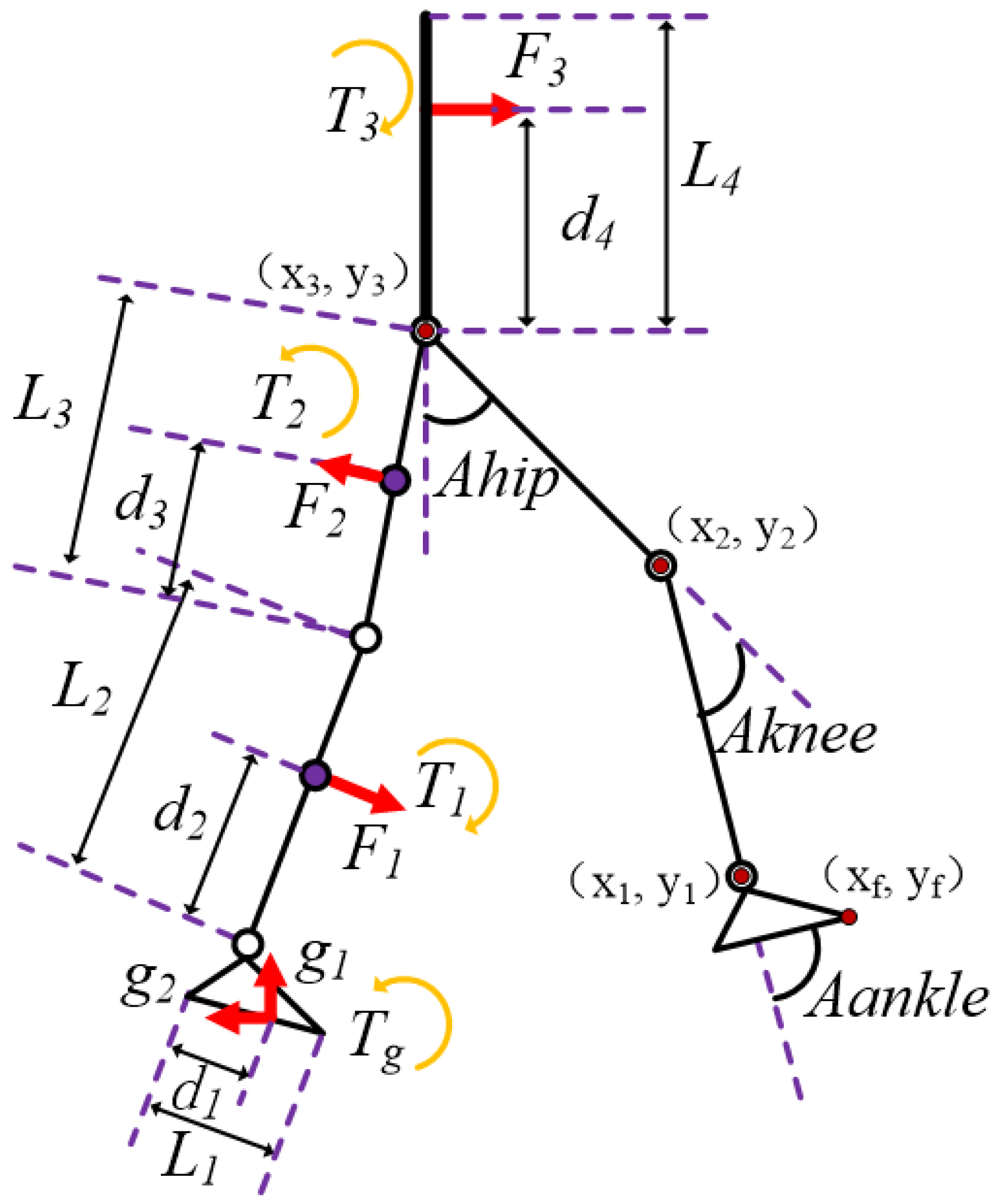
| Li, i = 1,2,3,4 | Length of each connecting rod |
| di, i = 1,2,3,4 | The distance from the center of mass of each link to the corresponding joint |
| Ahip, Aknee, Aankle | The angle of each connecting rod to the corresponding rod |
| F1, F2, F3 | Human–machine interaction force |
| T1, T2, T3 | Human–machine interaction torque |
| (xi,yi), i = 1,2,3 | Joint coordinates of exoskeleton |
| Tg | Ground reaction torque |
| g1g2 | Ground reaction force |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, N.; Liu, Y.; Song, Q.; Wu, D. A Compatible Design of a Passive Exoskeleton to Reduce the Body–Exoskeleton Interaction Force. Machines 2022, 10, 371. https://doi.org/10.3390/machines10050371
Zhou N, Liu Y, Song Q, Wu D. A Compatible Design of a Passive Exoskeleton to Reduce the Body–Exoskeleton Interaction Force. Machines. 2022; 10(5):371. https://doi.org/10.3390/machines10050371
Chicago/Turabian StyleZhou, Nengbing, Yali Liu, Qiuzhi Song, and Dehao Wu. 2022. "A Compatible Design of a Passive Exoskeleton to Reduce the Body–Exoskeleton Interaction Force" Machines 10, no. 5: 371. https://doi.org/10.3390/machines10050371