
Configuration Design and Optimal Energy Management for Coupled-Split Powertrain Tractor
Abstract
:1. Introduction
1.1. The Configuration of Agricultural Tractor and Literature Review
1.2. Proposed Energy Management Strategy and Contribution
- (1)
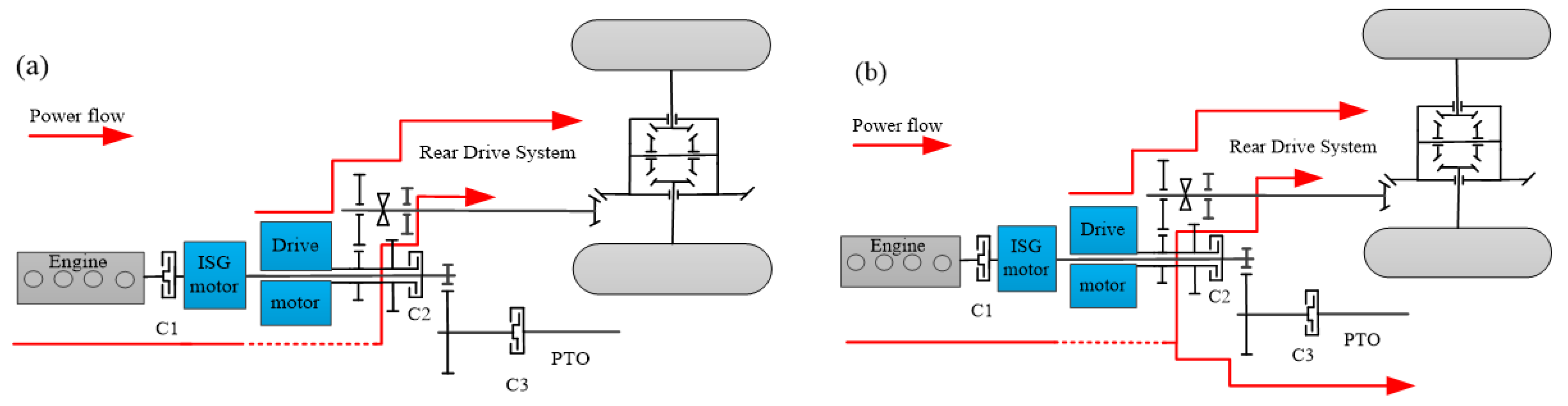
- To enhance the adaptability aspects of operation tasks and the feasibility of the mechanical system of tractors, a CSPT configuration of the tractor is constructed, in which the power takeoff (PTO) and front and rear driveshafts could output power independently.
- (2)
- A real-time energy management strategy for the CSPT is proposed with the ECMS method. The energy requirement can be allocated among three power units to the current tractor states, fully considering the overall efficiency in rotary tillage working conditions.
- (3)
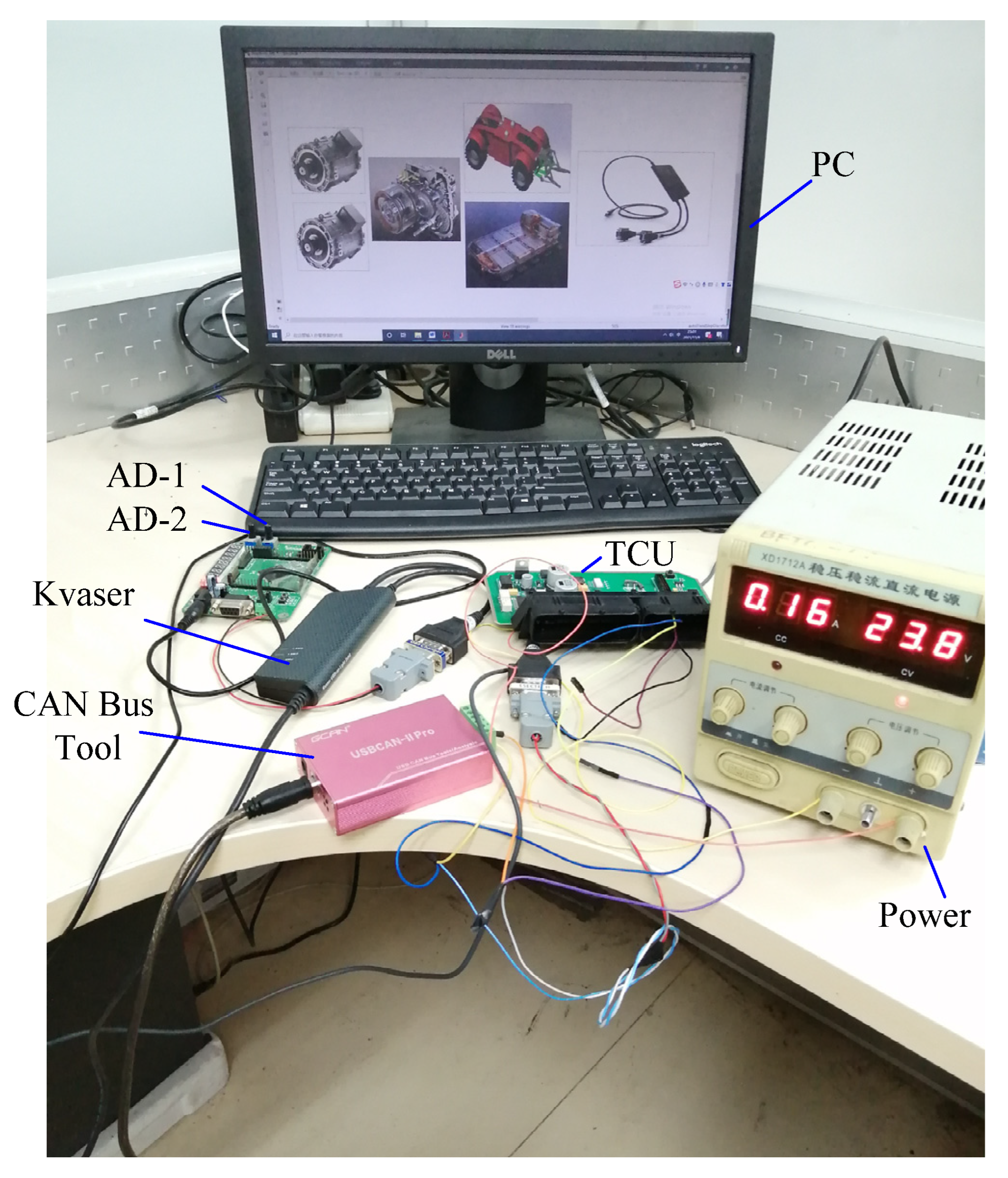
- To realize the ECMS in real time, the radial basis function neural network is used to predict the demand power of the tractor in rotary tillage conditions. Additionally, this section is conducted using edge computing. Furthermore, the hardware-in-loop experiment is implemented to validate the executability of the proposed EMS.
2. Configuration Design and Multimode Analysis of Tractor
2.1. Power Flow Modeling and Configuration of Coupled-Split Powertrains
2.2. The Dynamic Model Analysis of Driving Modes
3. Parameters Matching
3.1. Parameter Matching of Drive Motors
3.2. Parameter Matching of Engine and ISG Motor
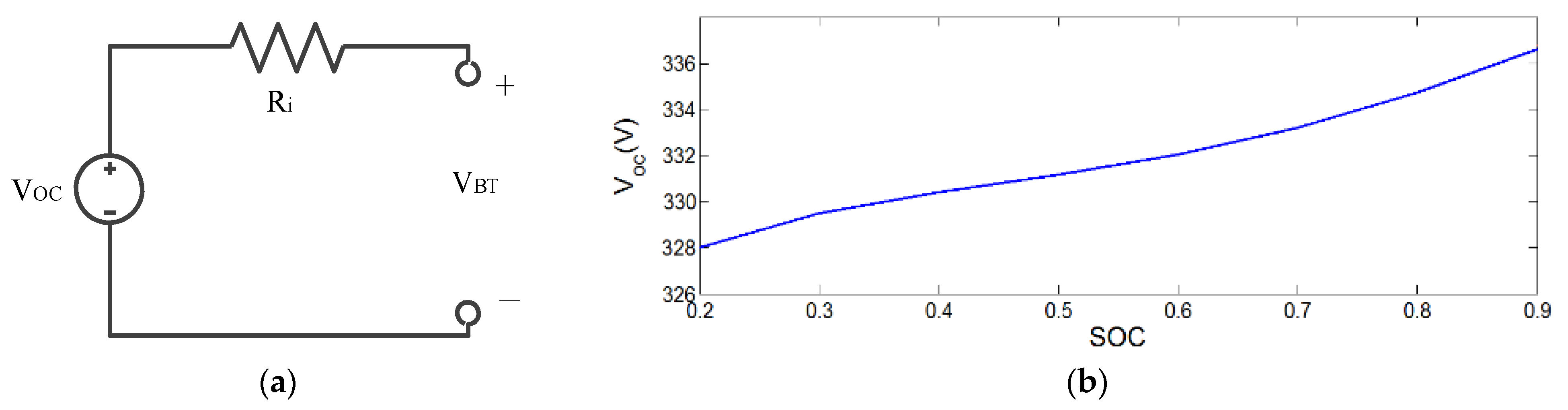
3.3. Parameter Matching of Battery-Rated Power
4. Energy Management Strategy in Rotary Tillage Working Conditions
4.1. Power Demand Forecasts in Rotary Tillage Conditions
4.2. Energy Management Strategy Based on Predictive Demand Power
4.3. Equivalence Factor Optimization Based on Genetic Algorithm
5. Results and Discussion
5.1. The Accuracy of Power Demand Prediction Based on RBF
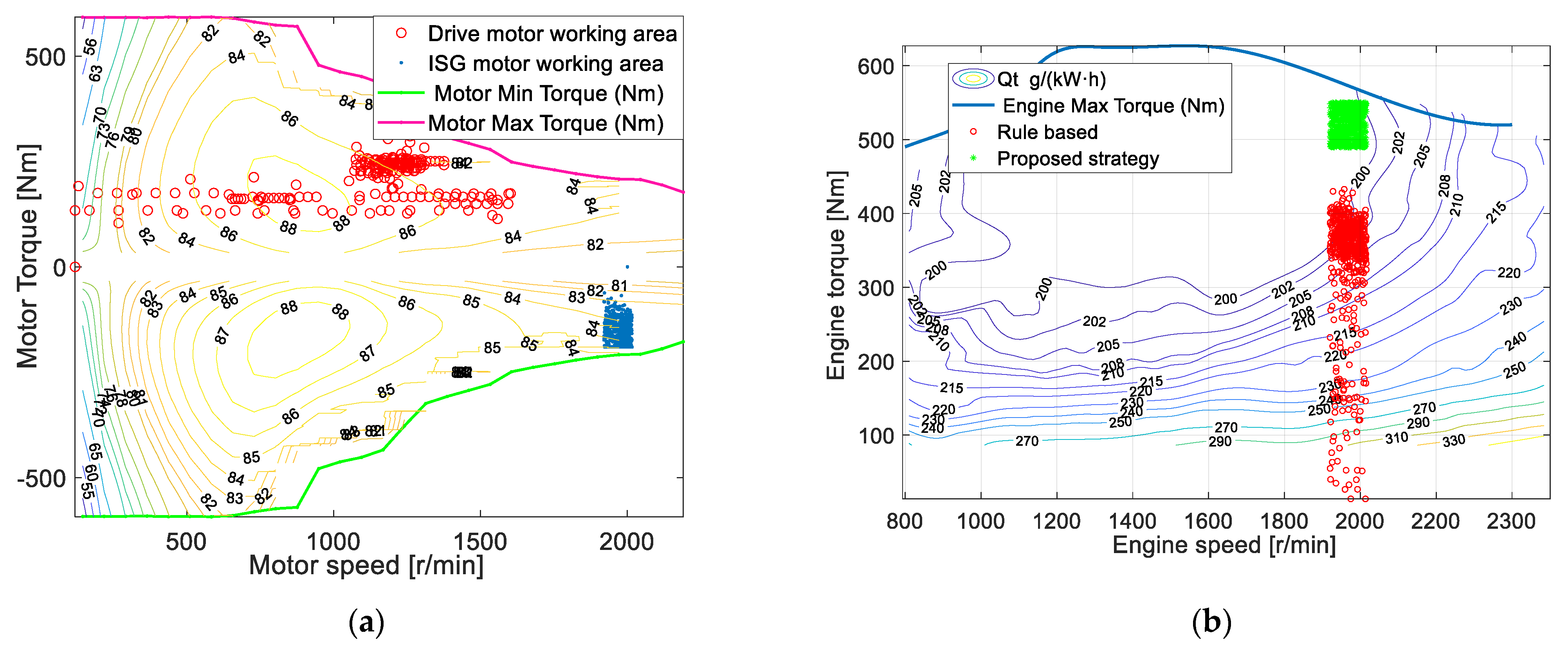
5.2. Simulation Results and Discussion
6. Conclusions
- (1)
- In this paper, a new powertrains configuration of an agriculture engineering tractor was proposed. Additionally, the parameters of the CSPTs with different powertrains were determined, and the power demand in most kinds of working conditions was satisfied. The ISG motor and drive motor combined power acts as the function of the CVT.
- (2)
- The RBF-NN was used to predict the power demand of the tractor in rotary tillage. Moreover, the root means square error between the actual power requirements and predicted power demand was controlled within 1.5 kW, which was an error of less than 1% in the forecasting.
- (3)
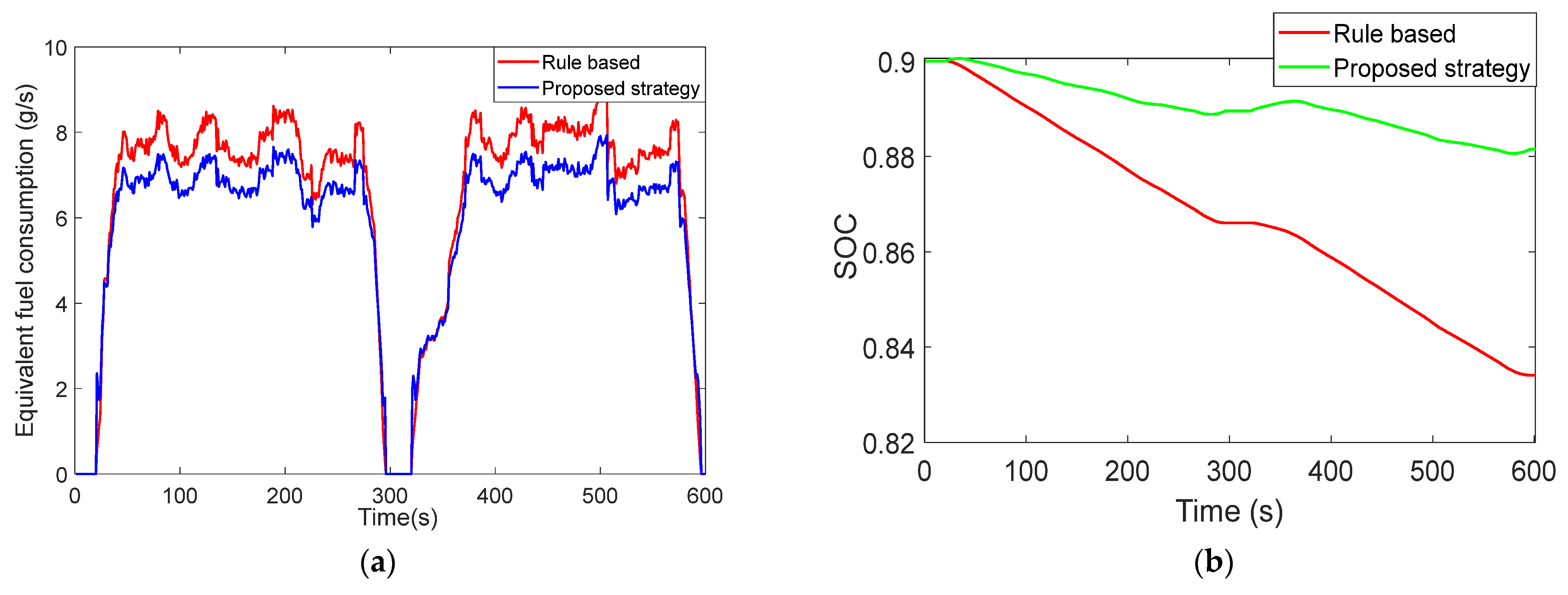
- The equivalent factor was optimized with the GA in the energy management strategy conducted online, which indicated that an equivalent fuel consumption in the rotary tillage operation mode was reduced by 8.4%, compared with the rule-based control strategy. With the proposed strategy, the engine could be operated in a high-efficiency range and the ISG motor could extend the cycling mileage in electric power working as a generator. Additionally, coordinating the output power from both the battery and fuel expressed the advantage of the proposed tractor configuration comprehensively.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value/Unit |
| A | Vehicle lateral surface | 3.5 m2 |
| C | Battery capacity | Ah |
| Cd | Aerodynamic coefficient | 0.73 |
| The driving force of the power system | N | |
| The rolling resistance | N | |
| The demand driving force in plow conditions | N | |
| IBT | Electric current | A |
| Moment of inertia of the drive motor | kg/m2 | |
| Moment of inertia of the engine | kg/m2 | |
| Moment of inertia of the ISG motor | kg/m2 | |
| Moment of inertia of the wheel | kg/m2 | |
| m | The mass of in using | 8690 kg |
| PBT | Electric power of the battery | kW |
| Pdem | The output power of the final drive | kW |
| The power of the drive motor | kW | |
| The power of the engine | kW | |
| The power of the drive motor satisfies the maximum climbing gradient | kW | |
| Pin | Input power of the powertrain | kW |
| The power of the ISG motor | kW | |
| The demand power in rotary tillage conditions | kW | |
| Q0 | Maximum battery charge | C |
| r | Tire radius | 0.654 m |
| Ri | The internal resistance of the battery | Ω |
| The torque of the drive motor | N·m | |
| Tdem | The final drive output torque | N·m |
| The torque of the engine | N·m | |
| The torque of the ISG motor | N·m | |
| The torque of the power take-off | N·m | |
| Pure battery life | h | |
| v | Tractor speed | m/s |
| VBT | The voltage of the load | V |
| Power carried by the battery | kWh | |
| VOC | Open-circuit voltage | V |
| Price of gasoline fuel and electricity, respectively | ||
| The rotational speed of the drive motor | rad/s | |
| The rotational speed of the engine | rad/s | |
| The rotational speed of the ISG motor | rad/s | |
| The rotational speed of the PTO | rad/s | |
| The rotational speed of the wheel | rad/s | |
| Climbing gradient | ° | |
| ρ | Aerodynamic resistance coefficient | 1.2 kg/m3 |
| f | Rolling coefficient | 0.06 |
| Transmission efficiency of the main reducer | % | |
| Transmission efficiency of high gear of rear drive system | % | |
| The efficiency of the total transmission | 0.86 | |
| Battery discharge efficiency | 0.9 | |
| The efficiency of the ISG motor or drive motor | % |
References
- Zhang, X.; Zou, Y.; Fan, J.; Guo, H. Usage pattern analysis of Beijing private electric vehicles based on real-world data—ScienceDirect. Energy 2019, 167, 1074–1085. [Google Scholar] [CrossRef]
- Du, W.; Zhao, S.; Jin, L.; Gao, J.; Zheng, Z. Optimization design and performance comparison of different powertrains of electric vehicles. Mech. Mach. Theory 2020, 156, 104143. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Song, J. Fuel consumption optimization for smart hybrid electric vehicle during a car-following process. Mech. Syst. Signal Process. 2016, 87, 17–29. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Chen, Y.; Zhao, K. A Novel Fuel-Cell Electric Articulated Vehicle and Its Drop-and-Pull Transport System. Energies 2020, 13, 3632. [Google Scholar] [CrossRef]
- Mudarisov, S.; Gainullin, I.; Gabitov, I.; Hasanov, E.; Farhutdinov, I. Soil compaction management: Reduce soil compaction using a chain-track tractor. J. Terramech. 2020, 89, 1–12. [Google Scholar] [CrossRef]
- Ghobadpour, A.; Mousazadeh, H.; Kelouwani, S.; Zioui, N.; Kandidayeni, M.; Boulon, L. An intelligent energy management strategy for an off-road plug-in hybrid electric tractor based on farm operation recognition. IET Electr. Syst. Transp. 2021, 11, 333–347. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, H.; Liu, H.; Qi, S. Research on the Evaluation Index of Handling Stability of Tractor and Double Trailer Combination. China J. Highw. Transp. 2017, 30, 145–151. [Google Scholar]
- Abotabik, M.; Meyer, R.T. Switched Optimal Control of a Heavy-Duty Hybrid Vehicle. Energies 2021, 14, 6736. [Google Scholar] [CrossRef]
- Mocera, F. A Model-Based Design Approach for a Parallel Hybrid Electric Tractor Energy Management Strategy Using Hardware in the Loop Technique. Vehicles 2020, 3, 1–19. [Google Scholar] [CrossRef]
- Hu, J.; Zu, G.; Jia, M.; Niu, X. Parameter matching and optimal energy management for a novel dual-motor multi-modes powertrain system. Mech. Syst. Signal Process. 2019, 116, 113–128. [Google Scholar] [CrossRef]
- Song, P.; Lei, Y.; Fu, Y. Multi-Objective Optimization and Matching of Power Source for PHEV Based on Genetic Algorithm. Energies 2020, 13, 1127. [Google Scholar] [CrossRef]
- Yong, Z.; Lin, Z. Parameter matching theory of hybrid track-type bulldozer power system. In Proceedings of the World Automation Congress, Puerto Vallarta, Mexico, 24–28 June 2012. [Google Scholar]
- Chen, Y.; Xie, B.; Du, Y.; Mao, E. Powertrain parameter matching and optimal design of dual-motor driven electric tractor. Int. J. Agric. Biol. Eng. 2019, 12, 33–41. [Google Scholar] [CrossRef] [Green Version]
- Qu, J.; Guo, K.; Zhang, Z.; Song, S.; Li, Y. Coupling Control Strategy and Experiments for Motion Mode Switching of a Novel Electric Chassis. Appl. Sci. 2020, 10, 701. [Google Scholar] [CrossRef] [Green Version]
- Barthel, J.; Gorges, D.; Bell, M.; Munch, P. Energy Management for Hybrid Electric Tractors Combining Load Point Shifting, Regeneration and Boost. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014. [Google Scholar]
- Chen, Z.; Mi, C.C.; Xiong, R.; Xu, J.; You, C. Energy management of a power-split plug-in hybrid electric vehicle based on genetic algorithm and quadratic programming. J. Power Sources 2014, 248, 416–426. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, J.; Liu, M.; Zhou, Z.; Liu, C. Control algorithm and energy management strategy for extended range electric tractors. Int. J. Agric. Biol. Eng. 2017, 10, 35–44. [Google Scholar]
- Zhou, Q.; Zhang, Y.; Li, Z.; Li, J.; Xu, H.; Olatunbosun, O. Cyber-Physical Energy-Saving Control for Hybrid Aircraft-Towing Tractor based on Online Swarm Intelligent Programming. IEEE Trans. Ind. Inform. 2017, 14, 4149–4158. [Google Scholar] [CrossRef] [Green Version]
- Troncon, D.; Alberti, L. Case of Study of the Electrification of a Tractor: Electric Motor Performance Requirements and Design. Energies 2020, 13, 2197. [Google Scholar] [CrossRef]
- Wu, Z.; Xie, B.; Li, Z.; Chi, R.; Ren, Z.; Du, Y.; Inoue, E.; Mitsuoka, M.; Okayasu, T.; Hirai, Y. Modelling and verification of driving torque management for electric tractor: Dual-mode driving intention interpretation with torque demand restriction. Biosyst. Eng. 2019, 182, 65–83. [Google Scholar] [CrossRef]
- Kim, W.S.; Kim, Y.J.; Kim, Y.S.; Baek, S.Y.; Baek, S.M.; Lee, D.H.; Nam, K.C.; Kim, T.B.; Lee, H.J. Development of Control System for Automated Manual Transmission of 45-kW Agricultural Tractor. Appl. Sci. 2020, 10, 2930. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Song, Z.H.; Xie, B. Plowing Performance Simulation and Analysis for Hybrid Electric Tractor. Appl. Mech. Mater. 2013, 365–366, 505–511. [Google Scholar]
- Agyeman, P.K.; Tan, G.; Alex, F.J.; Valiev, J.F.; Owusu-Ansah, P.; Olayode, I.O.; Hassan, M.A. Parameter Matching, Optimization, and Classification of Hybrid Electric Emergency Rescue Vehicles Based on Support Vector Machines. Energies 2022, 15, 7071. [Google Scholar] [CrossRef]
- Lagnelöv, O.; Larsson, G.; Nilsson, D.; Larsolle, A.; Hansson, P.A. Performance comparison of charging systems for autonomous electric field tractors using dynamic simulation. Biosyst. Eng. 2020, 194, 121–137. [Google Scholar] [CrossRef]
- Niu, P.; Chen, J.; Zhao, J.; Luo, Z. Analysis and evaluation of vibration characteristics of a new type of electric mini-tiller based on vibration test. Int. J. Agric. Biol. Eng. 2019, 12, 106–110. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Tian, J.; Zhang, S. Research on a Plug-In Hybrid Electric Bus Energy Management Strategy Considering Drivability. Energies 2018, 11, 2177. [Google Scholar] [CrossRef] [Green Version]
- Wei, H.; Zhong, Y.; Fan, L.; Ai, Q.; Zhao, W.; Jing, R.; Zhang, Y. Design and validation of a battery management system for solar-assisted electric vehicles. J. Power Sources 2021, 513, 230531. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Y.; Chen, Z.; Li, G.; Liu, Y. A Novel Learning Based Model Predictive Control Strategy for Plug-in Hybrid Electric Vehicle. IEEE Trans. Transp. Electrif. 2021, 8, 23–35. [Google Scholar] [CrossRef]
- Jinquan, G.; Hongwen, H.; Jiankun, P.; Nana, Z. A novel MPC-based adaptive energy management strategy in plug-in hybrid electric vehicles. Energy 2019, 175, 378–392. [Google Scholar] [CrossRef]











| Modes | Engine | ISG Motor | Drive Motor | C1 | C2 | C3 |
|---|---|---|---|---|---|---|
| SM1 | Off | Off | On | Off | Off | Off |
| SM2 | On/Off | On | On | On/Off | Off | On |
| TC | On/Off | On | On | On/Off | On | Off |
| STC | On | On | On | On | On | On |
| Components | Items | Parameters |
|---|---|---|
| Drive motor | Rated power (kW) | 65 |
| Rated speed (rpm) | 2200 | |
| Rated torque (Nm) | 280 | |
| Parameters of plow machine [24] | , Rolling resistance coefficient | 0.06~0.1 |
| z, Number of ploughshares | 6 | |
| , Plowshare width | 25 cm | |
| , Tillage depth | 20~22 cm | |
| , Soil proportion resistance | 4~6 N/cm2 | |
| Tractor | , Maximum climbing gradient | 15° |
| M, load weight under transfer conditions | 9500 kg |
| Components | Items | Parameters |
|---|---|---|
| Engine | Rated power (kW) | 145 |
| Rated speed (rpm) | 2200 | |
| Rated torque (Nm) | 630 | |
| ISG motor | Rated power (kW) | 50 |
| Rated speed (rpm) | 2200 | |
| Rated torque (Nm) | 220 | |
| Parameters of rotary tillage machine [25] | h, rotary tillage depth | 16~18 cm |
| B, width length of rotary tillage | 1.5~1.7 m | |
| , proportion resistance of rotary tillage | 8~10 N/cm2 | |
| , root depth correction coefficient | 1 | |
| , correction coefficient of soil moisture content | 0.94 | |
| , correction coefficient of vegetation content in the soil | 1.1 | |
| , operation mode correction factor | 0.65 |
| Components | Items | Parameters |
|---|---|---|
| Power battery | , average operating voltage (V) | 340 |
| C, rated capacity (Ah) | 240 | |
| Transmission ratio | , the reduction ratio of the main reducer | 6.24 |
| , the reduction ratio of the low-gear of the rear drive system | 7.23 | |
| , the reduction ratio of the high-gear of the rear drive system | 2.27 | |
| , the reduction ratio of the low-gear of the PTO | 2.46 | |
| , the reduction ratio of the intermediate gear of the PTO | 1.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dou, H.; Wei, H.; Zhang, Y.; Ai, Q. Configuration Design and Optimal Energy Management for Coupled-Split Powertrain Tractor. Machines 2022, 10, 1175. https://doi.org/10.3390/machines10121175
Dou H, Wei H, Zhang Y, Ai Q. Configuration Design and Optimal Energy Management for Coupled-Split Powertrain Tractor. Machines. 2022; 10(12):1175. https://doi.org/10.3390/machines10121175
Chicago/Turabian StyleDou, Haishi, Hongqian Wei, Youtong Zhang, and Qiang Ai. 2022. "Configuration Design and Optimal Energy Management for Coupled-Split Powertrain Tractor" Machines 10, no. 12: 1175. https://doi.org/10.3390/machines10121175