

A Coupled PDE-ODE Model for Nonlinear Transient Heat Transfer with Convection Heating at the Boundary: Numerical Solution by Implicit Time Discretization and Sequential Decoupling


Abstract
:1. Introduction
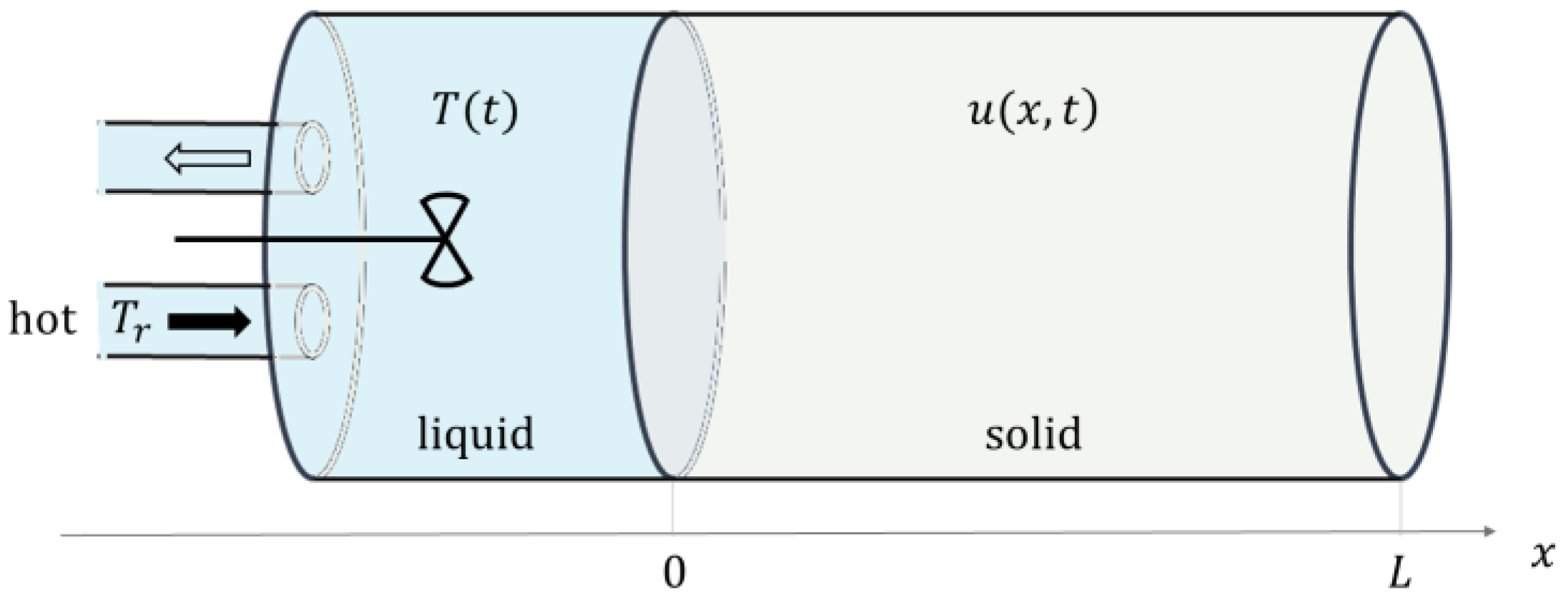
2. Physical System and Mathematical Model
3. Dimensionless Equations and Formulation of the Mathematical Problem
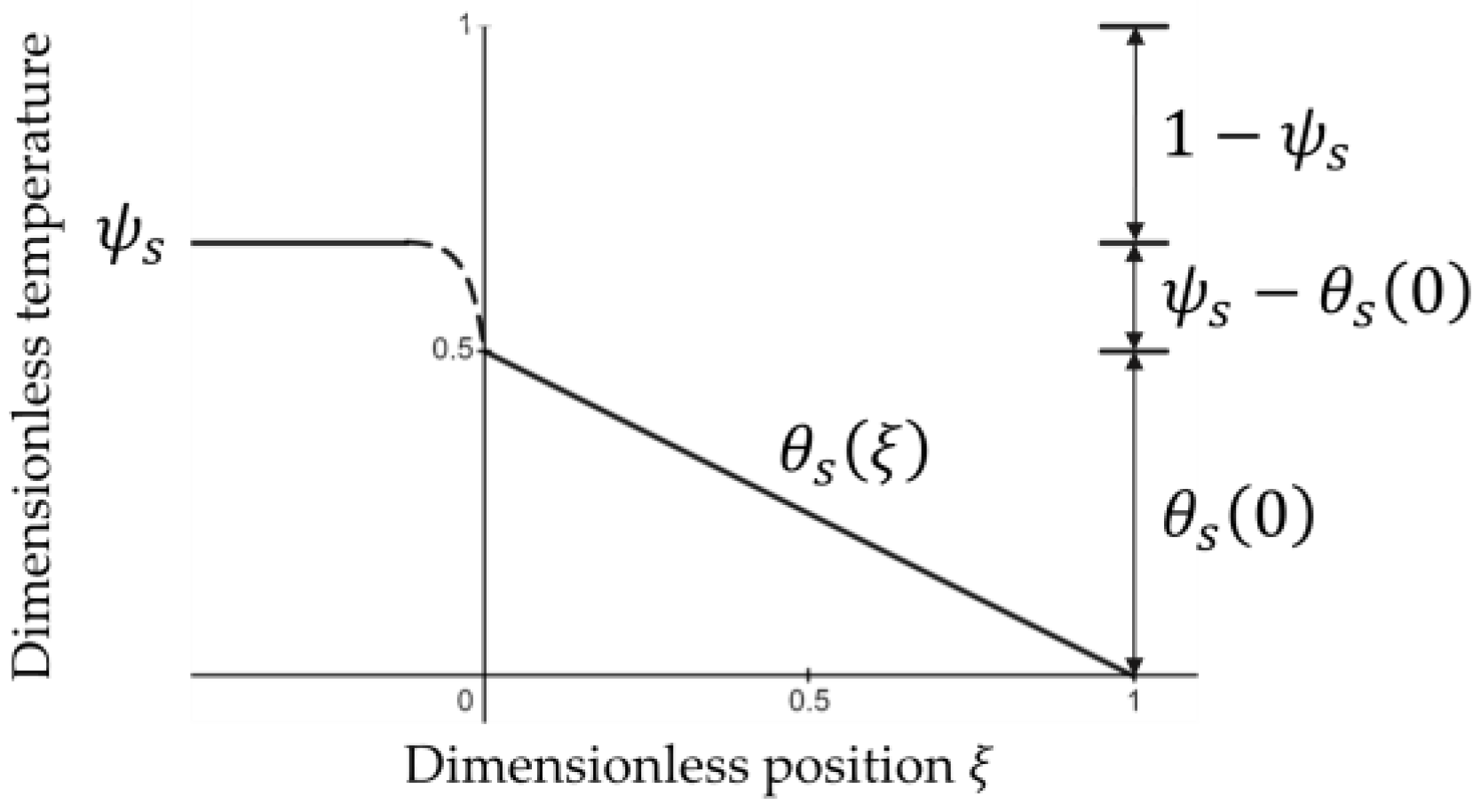
4. Steady-State Analysis
5. Implicit Time Discretization and Sequential Decoupling
6. Solving the TPBVP via the FDM
6.1. Discretizing the TPBVP with the FDM
6.2. Solving the Nonlinear System via the Newton Method
6.3. Calculating the Elements of the Jacobian
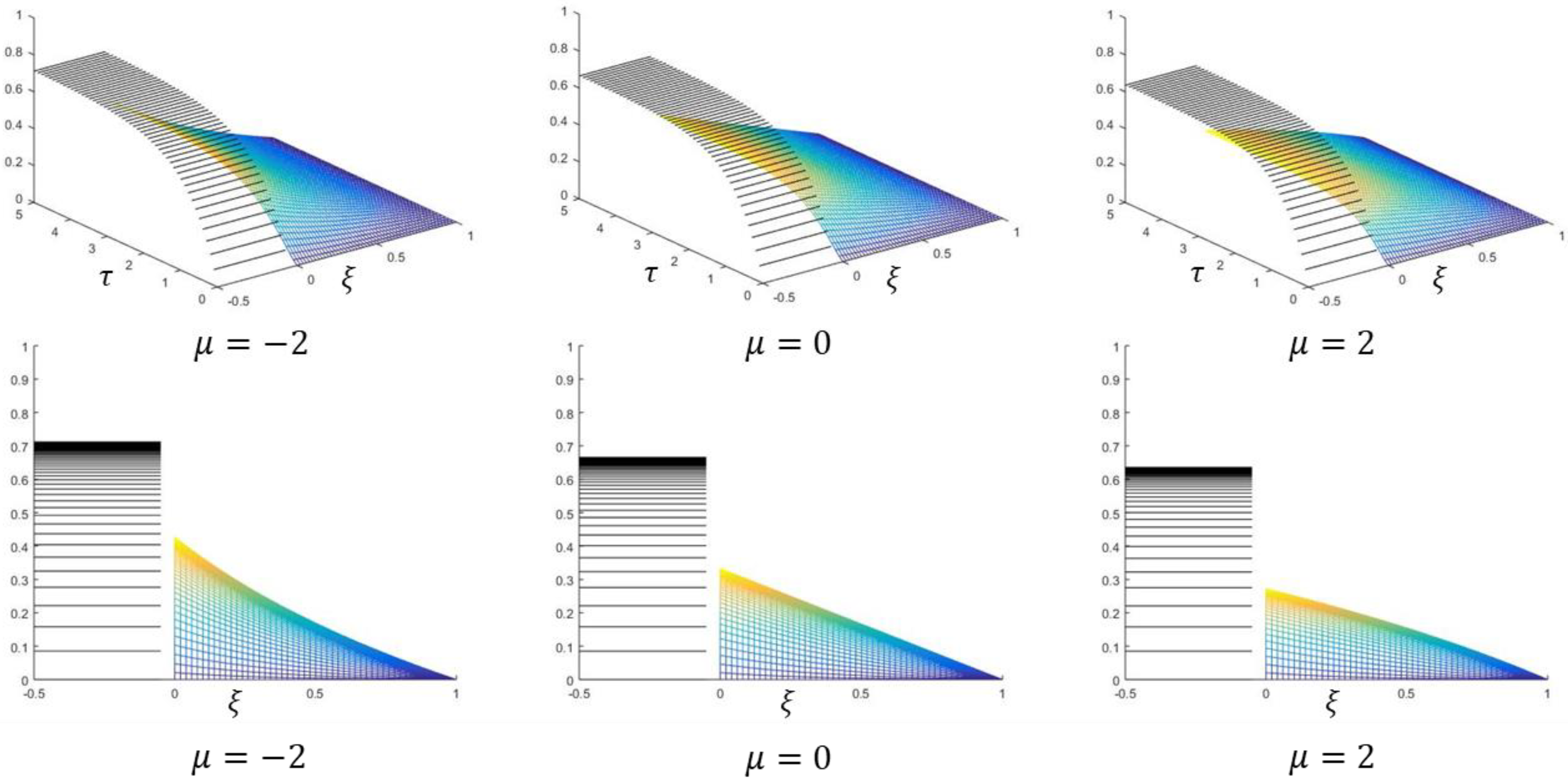
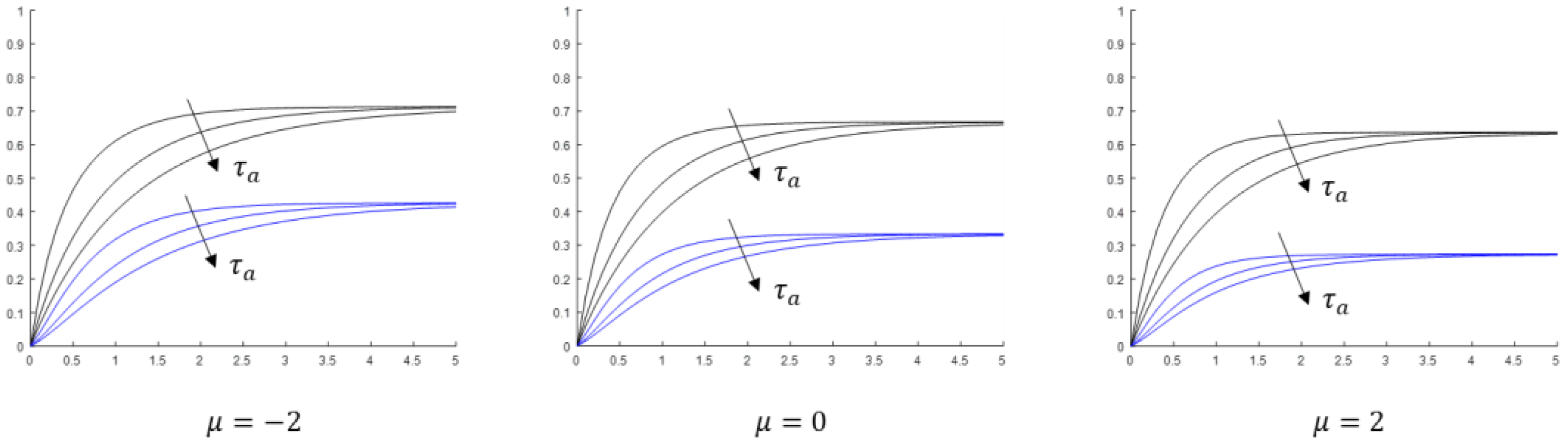
7. Computer Experiments and Discussion
- Example 1
- Example 2
- Example 3
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbol | Description | Unit |
| time | ||
| position | ||
| temperature in the solid body at position and time | ||
| temperature in the tank and of the outgoing liquid at time | ||
| temperature of the incoming liquid | ||
| initial temperature in the tank and along the solid body | ||
| thermal conductivity of the solid body at temperature | ||
| density of the solid body | ||
| density of the liquid | ||
| specific heat capacity (at constant pressure) of the solid body | ||
| specific heat capacity (at constant pressure) of the liquid | ||
| length of the solid body | ||
| area of the contact surface liquid—solid body | ||
| volume of the tank | ||
| volumetric flow rate of the incoming/outgoing liquid | ||
| mean convective heat transfer coefficient | ||
| , dimensionless temperature in the solid body | ||
| , dimensionless temperature in the tank | ||
| , thermal conductivity of the solid body at | ||
| , thermal conductivity of the solid body at | ||
| , dimensionless thermal conductivity of the solid body at | ||
| , characteristic time related to advection through the pipes | ||
| , characteristic time related to convection in the tank | ||
| , characteristic time related to conduction in the solid body | ||
| , dimensionless position | ||
| , dimensionless time (Fourier number at ) | ||
| , dimensionless temperature in the solid body at and | ||
| , dimensionless temperature in the tank at | ||
| , dimensionless thermal conductivity of the solid body at | ||
| , dimensionless characteristic time related to advection | ||
| , dimensionless characteristic time related to convection | ||
| , Biot number at reference temperature |
Appendix A
function main mu=-2; N=51; dx=1/(N-1); M=51; tf=5; dt=tf/(M-1); ta=1; tc=1; Bi=1; R=(1/dt+1/ta+1/tc)^(-1); t=dt*(0:M-1)'; x=dx*(0:N-1)'; T=zeros(M,1); Y=zeros(N,M); F=zeros(N,1); J=zeros(N,N); J(N,N)=1; for m=2:M % time level y=Y(:,m-1); delta=1; while(delta>0.000001) % FDM + Newton g=exp(mu*y(1)); gy=mu*g; F(1)=g*(4*y(2)-3*y(1)-y(3))/2+dx*Bi*(R*(T(m-1)/dt+1/ta+y(1)/tc)-y(1)); F(N)=y(N); J(1,1)=gy*(4*y(2)-3*y(1)-y(3))/2-3*g/2+dx*Bi*(R/tc-1); J(1,2)=2*g; J(1,3)=-g/2; for i=2:N-1 g=exp(mu*y(i)); gy=mu*g; gyy=mu*gy; Dy=(y(i+1)-y(i-1))/(2*dx); f=((y(i)-Y(i,m-1))/dt-gy*Dy*Dy)/g; q=(1/dt-gyy*Dy*Dy-f*gy)/g; p=-2*gy*Dy/g; F(i)=y(i+1)-2*y(i)+y(i-1)-dx*dx*f; J(i,i-1)=1+dx*p/2; J(i,i)=-2-dx*dx*q; J(i,i+1)=1-dx*p/2; end dy=-J\F; y=y+dy; % Newton iteration delta=norm(dy,Inf); end T(m)=R*(T(m-1)/dt+1/ta+y(1)/tc); Y(:,m)=y; end plot3(0,0,1); hold on; xlim([-0.5 1]); ylim([0 tf]); zlim([0 1]); a=zeros(1,m); plot3([-.5+a;-.05+a],[t';t'],[T';T'],'k'); mesh(x,t,Y'); % plot3(-.5+a,t,T,'k'); % plot3(a,t,Y(1,:)','b'); % Flux_left=Bi*(T-Y(1,:)'); % plot3(a,t,Flux_left,'b'); % Flux_right=(-exp(mu*Y(N,:)).*(3*Y(N,:)-4*Y(N-1,:)+Y(N-2,:)))'/(2*dx); % plot3(1+a,t,Flux_right,'g'); end

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation in Article | MATLAB Variable |
|---|---|
| mu | |
| M | |
| N | |
| tf | |
| ta | |
| tc | |
| dt | |
| dx | |
| Bi | |
| R | |
| m | |
| i | |
| t(m) | |
| x(i) | |
| T(m) | |
| Y(i,m) | |
| Y(:,m) | |
| Y(:,m-1) | |
| y | |
| dy | |
| F | |
| J | |
| delta | |
| y(i) | |
| g | |
| gy | |
| () | gyy |
| Dy | |
| f | |
| q | |
| p |
References
- Bergman, T.L.; Incropera, F.P.; DeWitt, D.P.; Lavine, A.S. Fundamentals of Heat and Mass Transfer, 7th ed.; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Sinha, A.; Mishra, R.K. Temperature regulation in a Continuous Stirred Tank Reactor using event triggered sliding mode control. IFAC-PapersOnLine 2018, 51, 401–406. [Google Scholar] [CrossRef]
- Bequette, B.W. Process Dynamics: Modeling, Analysis, and Simulation. Prentice Hall International Series in the Physical and Chemical Engineering Sciences. Available online: http://www.pacificcrn.com/Upload/file/201612/12/20161212223432_16264.pdf (accessed on 14 February 2023).
- Smith, G.D. Numerical Solution of Partial Differential Equations: Finite Difference Methods, 3rd ed.; Oxford Applied Mathematics and Computing Science Series; Clarendon Press: Oxford, UK, 1986. [Google Scholar]
- Grarslan, G. Numerical modelling of linear and nonlinear diffusion equations by compact finite difference method. Appl. Math. Comput. 2010, 216, 2472–2478. [Google Scholar] [CrossRef]
- Grarslan, G.; Sari, G. Numerical solutions of linear and nonlinear diffusion equations by a differential quadrature method (DQM). Commun. Numer. Meth. En. 2009, 27, 69–77. [Google Scholar] [CrossRef]
- Brabazon, K.J.; Hubbard, M.E.; Jimack, P.K. Nonlinear multigrid methods for second order differential operators with nonlinear diffusion coefficient. Comput. Math. Appl. 2014, 68, 1619–1634. [Google Scholar] [CrossRef]
- Polyanin, A.D.; Zhurov, A.I.; Vyaz’min, A.V. Exact Solutions of Nonlinear Heat- and Mass-Transfer Equations. Theor. Found. Chem. Eng. 2000, 34, 403–415. [Google Scholar] [CrossRef]
- Sadighi, A.; Ganji, D.D. Exact solutions of nonlinear diffusion equations by variational iteration method. Comput. Math. Appl. 2007, 54, 1112–1121. [Google Scholar] [CrossRef] [Green Version]
- Hristov, J. Integral solutions to transient nonlinear heat (mass) diffusion with a power-law diffusivity: A semi-infinite medium with fixed boundary conditions. Heat Mass Transf. 2016, 52, 635–655. [Google Scholar] [CrossRef]
- Marucho, M.D.; Campo, A. Suitability of the Method of Lines for rendering analytic/numeric solutions of the unsteady heat conduction equation in a large plane wall with asymmetric convective boundary conditions. Int. J. Heat Mass Transf. 2016, 99, 201–208. [Google Scholar] [CrossRef]
- Tang, S.; Xie, C. Stabilization for a coupled PDE–ODE control system. J. Frankl. Inst. 2011, 348, 2142–2155. [Google Scholar] [CrossRef]
- Wang, J.-M.; Liu, J.-J.; Ren, B.; Chen, J. Sliding mode control to stabilization of cascaded heat PDE–ODE systems subject to boundary control matched disturbance. Automatica 2015, 52, 23–34. [Google Scholar] [CrossRef]
- Lhachemi, H.; Prieur, C. Stability analysis of reaction–diffusion PDEs coupled at the boundaries with an ODE. Automatica 2022, 144, 110465. [Google Scholar] [CrossRef]
- Li, J.; Wu, Z.; Wen, C. Adaptive stabilization for a reaction–diffusion equation with uncertain nonlinear actuator dynamics. Automatica 2021, 128, 109594. [Google Scholar] [CrossRef]
- Hasan, A.; Tang, S.-X. Boundary control of a coupled Burgers’ PDE-ODE system. Int. J. Robust Nonlinear Control 2022, 32, 5812–5836. [Google Scholar] [CrossRef]
- Baudouin, L.; Seuret, A.; Gouaisbaut, F. Stability analysis of a system coupled to a heat equation. Automatica 2019, 99, 195–202. [Google Scholar] [CrossRef] [Green Version]
- Yebi, A.; Ayalew, B. Optimal Layering Time Control for Stepped-Concurrent Radiative Curing Process. J. Manuf. Sci. Eng. 2015, 137, 011020. [Google Scholar] [CrossRef] [Green Version]
- An, L.; Chae, Y.T.; Horesh, R.; Lee, Y.; Zhang, R. An inverse PDE-ODE model for studying building energy demand. In Proceedings of the Winter Simulations Conference (WSC) 2013, Washington, DC, USA, 8–11 December 2013; pp. 1869–1880. [Google Scholar]
- Johansson, A.; Chaudhry, J.H.; Carey, V.; Estep, D.; Ginting, V.; Larson, M.; Tavener, S. Adaptive finite element solution of multiscale PDE–ODE systems. Comput. Methods Appl. Mech. Eng. 2015, 287, 150–171. [Google Scholar] [CrossRef] [Green Version]
- Hackbusch, W. Multi-Grid Methods and Applications; Springer Series in Computational Mathematics, 4; Springer: Berlin/Heidelberg, Germany, 1985. [Google Scholar]
- Brandt, A. Multilevel adaptive solutions to boundary value problems. Math. Comp. 1977, 31, 333–390. [Google Scholar] [CrossRef]
- Briggs, W.; Henson, V.; McCormick, S. A Multigrid Tutorial, 2nd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2000. [Google Scholar]
- Trottenberg, U.; Oosterlee, C.; Schüller, A. Multigrid; Academic Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Gerecht, D. Adaptive Finite Element Simulation of Coupled PDE/ODE Systems Modeling Intercellular. Signaling. Dissertation, Ruprecht-Karls-Universität, Heidelberg, Germany, 2015. [Google Scholar]
- Heil, M. Stokes flow in an elastic tube—A large-displacement fluid structure interaction problem. Int. J. Numer. Methods Fluids 1998, 28, 243–265. [Google Scholar] [CrossRef]
- Moghadam, M.E.; Vignon-Clementel, I.E.; Figliola, R.; Marsden, A.L. A modular numerical method for implicit 0D/3D coupling in cardiovascular finite element simulations. J. Comput. Phys. 2013, 244, 63–79. [Google Scholar] [CrossRef]
- Carraro, T.; Friedmann, E.; Gerecht, D. Coupling vs decoupling approaches for PDE/ODE systems modeling intercellular signaling. J. Comput. Phys. 2016, 314, 522–537. [Google Scholar] [CrossRef] [Green Version]
- Filipov, S.M.; Faragó, I. Implicit Euler time discretization and FDM with Newton method in nonlinear heat transfer modeling. Math. Model. 2018, 2, 94–98. [Google Scholar]
- Faragó, I.; Filipov, S.M.; Avdzhieva, A.; Sebestyén, G.S. A Numerical Approach to Solving Unsteady One-Dimensional Nonlinear Diffusion Equations. In A Closer Look at the Diffusion Equation; Hristov, J., Ed.; Nova Science Publishers: Hauppauge, NY, USA, 2020; pp. 1–26. [Google Scholar]
- Filipov, S.M.; Faragó, I.; Avdzhieva, A. Mathematical Modelling of Nonlinear Heat Conduction with Relaxing Boundary Conditions. Numerical Methods and Applications. Lect. Notes Comput. Sci. 2023, in press. [Google Scholar]
- Keller, H.B. Numerical Methods for Two-Point Boundary-Value Problems; Blaisdell Publishing Co.: Waltham, MA, USA; Ginn and Co.: Toronto, ON, Canada, 1968. [Google Scholar]
- Ascher, U.M.; Mattjeij, R.M.; Russel, R.D. Numerical Solution of Boundary Value Problems for Ordinary Differential Equations; Classics in Applied Mathematics; SIAM: Philadelphia, PA, USA, 1995. [Google Scholar]
- Filipov, S.M.; Gospodinov, I.D.; Faragó, I. Replacing the finite difference methods for nonlinear two-point boundary value problems by successive application of the linear shooting method. J. Comput. Appl. Math. 2019, 358, 46–60. [Google Scholar] [CrossRef]
- Faragó, I.; Filipov, S.M. The Linearization Methods as a Basis to Derive the Relaxation and the Shooting Methods. In A Closer Look at Boundary Value Problems; Avci, M., Ed.; Nova Science Publishers: Hauppauge, NY, USA, 2020; pp. 183–210. [Google Scholar]
- Tirmizi, I.A.; Twizell, E.H. Higher-order finite difference methods for nonlinear second-order two-point boundary-value problems. Appl. Math. Lett. 2002, 15, 897–902. [Google Scholar] [CrossRef] [Green Version]
- Khan, R.A. The generalized quasilinearization technique for a second order differential equation with separated boundary conditions. Math. Comput. Model. 2006, 43, 727–742. [Google Scholar] [CrossRef]
- Ha, S.N. A nonlinear shooting method for two-point boundary value problems. Comput. Math. Appl. 2001, 42, 1411–1420. [Google Scholar]
- Filipov, S.M.; Gospodinov, I.D.; Faragó, I. Shooting-projection method for two-point boundary value problems. Appl. Math. Lett. 2017, 72, 10–15. [Google Scholar] [CrossRef] [Green Version]
- Liskovets, O.A. The Method of Lines. J. Diff. Eqs. 1965, 1, 1308. [Google Scholar]
- Davies, T.W. Fourier Number. Thermopedia 2011. Available online: https://www.thermopedia.com/content/782/ (accessed on 15 February 2023).
- Davies, T.W. Biot Number. Thermopedia 2011. Available online: https://www.thermopedia.com/content/585/ (accessed on 15 February 2023).
- Lienemann, J.; Yousefi, A.; Korvink, J.G. Nonlinear Heat Transfer Modeling. In Dimension Reduction of Large-Scale Systems, Proceedings of the A Workshop, Oberwolfach, Germany, 19–25 October 2003; Benner, P., Sorensen, D.C., Mehrmann, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; Volume 45, pp. 327–331. [Google Scholar]
- Varun Kumar, R.S.; Saleh, B.; Sowmya, G.; Afzal, A.; Prasannakumara, B.C.; Punith Gowda, R.J. Exploration of transient transfer through moving plate with exponentially temperature-dependent thermal properties. Waves Random Complex Media 2022, 1–19. [Google Scholar] [CrossRef]
- FTCS Scheme, Wikipedia. 2021. Available online: https://en.wikipedia.org/wiki/FTCS_scheme (accessed on 15 February 2023).










| 1 | 4 | 0.500861 | 0.001146 | |
| 2 | 8 | 0.500007 | 0.000292 | 3.93 |
| 3 | 16 | 0.499788 | 0.000074 | 3.97 |
| 4 | 32 | 0.499733 | 0.000018 | 3.99 |
| 5 | 64 | 0.499719 | 0.000005 | 4.00 |
| 6 | 128 | 0.499716 | 0.000001 | 4.04 |
| 1 | 4 | 0.225643 | 0.001918 | |
| 2 | 8 | 0.224178 | 0.000452 | 4.24 |
| 3 | 16 | 0.223835 | 0.000109 | 4.15 |
| 4 | 32 | 0.223752 | 0.000027 | 4.08 |
| 5 | 64 | 0.223732 | 0.000007 | 4.05 |
| 6 | 128 | 0.223727 | 0.000002 | 4.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Filipov, S.M.; Hristov, J.; Avdzhieva, A.; Faragó, I. A Coupled PDE-ODE Model for Nonlinear Transient Heat Transfer with Convection Heating at the Boundary: Numerical Solution by Implicit Time Discretization and Sequential Decoupling. Axioms 2023, 12, 323. https://doi.org/10.3390/axioms12040323
Filipov SM, Hristov J, Avdzhieva A, Faragó I. A Coupled PDE-ODE Model for Nonlinear Transient Heat Transfer with Convection Heating at the Boundary: Numerical Solution by Implicit Time Discretization and Sequential Decoupling. Axioms. 2023; 12(4):323. https://doi.org/10.3390/axioms12040323
Chicago/Turabian StyleFilipov, Stefan M., Jordan Hristov, Ana Avdzhieva, and István Faragó. 2023. "A Coupled PDE-ODE Model for Nonlinear Transient Heat Transfer with Convection Heating at the Boundary: Numerical Solution by Implicit Time Discretization and Sequential Decoupling" Axioms 12, no. 4: 323. https://doi.org/10.3390/axioms12040323