

A Numerical Implementation of Fractional-Order PID Controllers for Autonomous Vehicles
 , ,
, ,  and
and
Abstract
:1. Introduction
2. The Fractional-Order PID Controller
2.1. The CFE Approximation
2.2. Oustaloup’s Approximation
3. The Design of the Fractional-Order PID Controller for Autonomous Cars
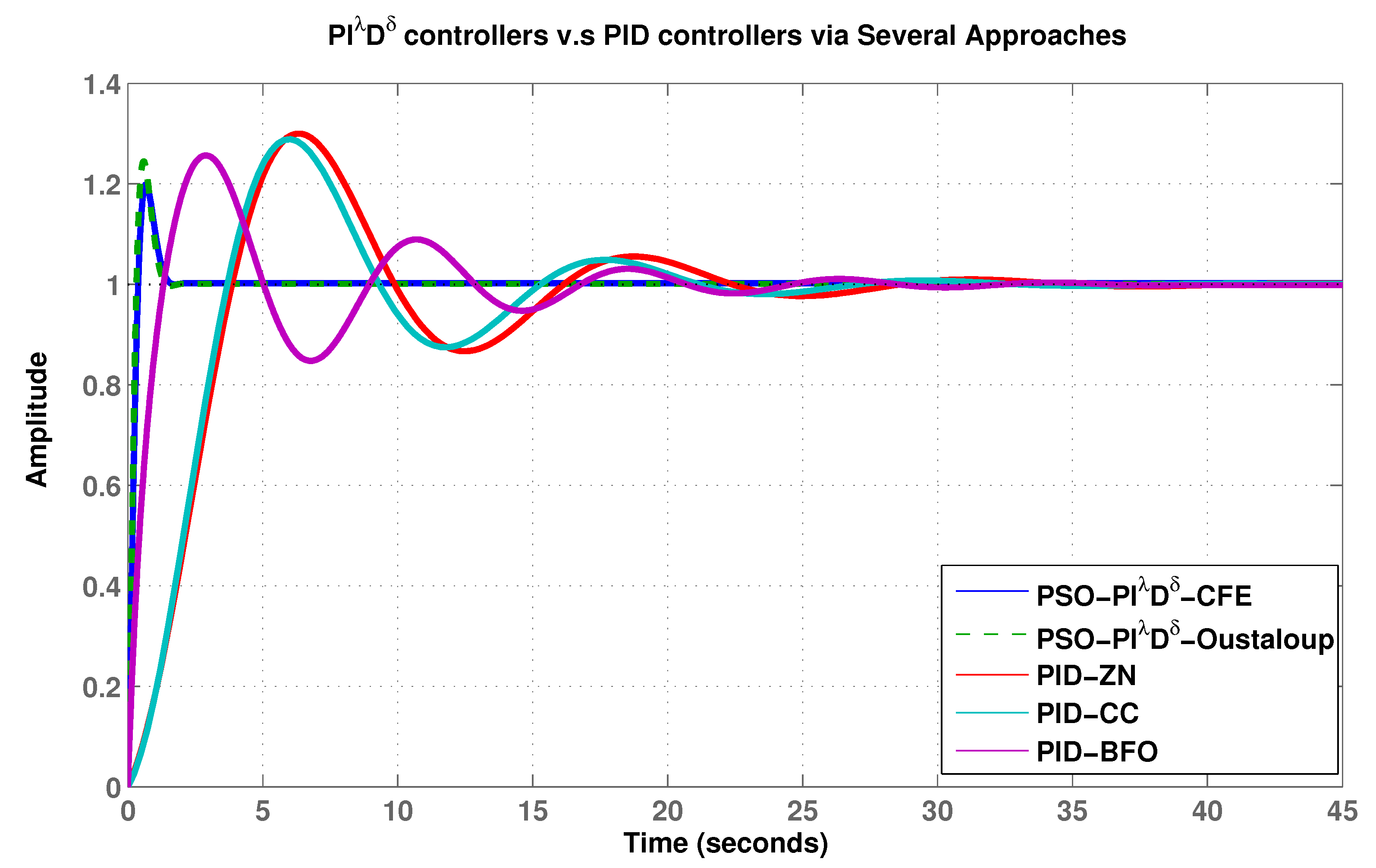
3.1. Tuning Fractional-Order PID of Linear Transfer Motion
- The -PSO-controller via the CFE approach:
- The -PSO-controller via Oustaloup’s approach:
- The PID controller via the bacteria-foraging-algorithm (BFA) approach: herein, we implement the BFA to obtain the PID controller. The output form is as follows:
- The PID controller via the Ziegler–Nichols (ZN) approach: herein, we implement the ZN algorithm to obtain the PID controller. The output is of the following form:
- The PID controller via the Cohen-Coon (CC) approach: here, we applied the CC algorithm to obtain the PID controller. This controller has the following form:
3.2. Tuning the Fractional-Order PID Controller for Angular Transfer Motion
- The -PSO-controller via the CFE approach:
- The -PSO-controller via Oustaloup’s approach:
- The PID controller via the bacteria foraging algorithm (BFA): in this part, we obtain the following result:
- The PID controller via the Ziegler–Nichols (ZN) approach: in this part, we have the following:
- The PID controller via the Cohen–Coon (CC) approach: herein, we have
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ammar, H.H.; Azar, A.T. Robust path tracking of mobile robot using fractional order pid controller. In Advances in Intelligent Systems and Computing, Proceedings of the International Conference on Advanced Machine Learning Technologies and Applications (AMLTA2019), Cairo, Egypt, 28–30 March 2019; Hassanien, A.E., Azar, A.T., Gaber, T., Bhatnagar, R.F., Tolba, M., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 370–381. [Google Scholar]
- Ammar, H.H.; Azar, A.T.; Tembi, T.D.; Tony, K.; Sosa, A. Design and implementation of fuzzy PID controller into multi agent smart library system prototype. In Advances in Intelligent Systems and Computing, Proceedings of the International Conference on Advanced Machine Learning Technologies and Applications (AMLTA2018), Cairo, Egypt, 22–24 February 2018; Hassanien, A.E., Tolba, M.F., Elhoseny, M., Mostafa, M., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 127–137. [Google Scholar]
- Azar, A.T.; Serrano, F.E. Design and Modeling of Anti Wind up PID Controllers; Springer International Publishing: Cham, Switzerland, 2015; pp. 1–44. [Google Scholar]
- Azar, A.T.; Vaidyanathan, S. Handboook of Research on Advanced Intelligent Control Engineering and Automation; IGI Global: New York, NY, USA, 2015. [Google Scholar]
- Bimbraw, K. Autonomous cars: Past, present and future a review of the developments in the last century, the present scenario and the expected future of autonomous vehicle technology. In Proceedings of the 2015 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Colmar, France, 21–23 July 2015; Volume 1, pp. 191–198. [Google Scholar]
- Ogata, K. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Jeongheon, H.; Skelton, R. An LMI optimization approach for structured linear controllers. In Proceedings of the 42nd IEEE International Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 5143–5148. [Google Scholar]
- Kalangadan, A.; Priya, N.; Kumar, T.K.S. PI, PID controller design for interval systems using frequency response model matching technique. In Proceedings of the International Conference on Control, Communication and Computing India, ICCC 2015, Trivandrum, India, 19–21 November 2015; pp. 119–124. [Google Scholar]
- Ahmmed, T.; Akhter, I.; Karim, S.M.R.; Sabbir Ahamed, F.A. Genetic Algorithm Based PID Parameter Optimization. Am. J. Intell. Syst. 2020, 10, 8–13. [Google Scholar] [CrossRef]
- Suksawat, T.; Kaewpradit, P. Comparison of Ziegler-Nichols and Cohen-Coon Tuning Methods: Implementation to Water Level Control Based MATLAB and Arduino. Eng. J. Chiang Mai Univ. 2021, 28, 153–168. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Latha, K.; Rajinikanth, V.; Surekha, P.M. PSO-Based PID Controller Design for a Class of Stable and Unstable Systems. ISRN Artif. Intell. 2013, 2013, 543607. [Google Scholar] [CrossRef] [Green Version]
- Masrom, M.F.; Ghani, N.M.A.; Tokhi, M.O. Particle swarm optimization and spiral dynamic algorithm-based interval type-2 fuzzy logic control of triple-link inverted pendulum system: A comparative assessment. J. Low Freq. Noise Vib. Act. Control. 2021, 40, 367–382. [Google Scholar] [CrossRef] [Green Version]
- Momani, S.; El-Khazali, R.; Batiha, I.M. Tuning PID and PIλDδ controllers using particle swarm optimization algorithm via El-Khazali’s approach. In Proceedings of the 45th International Conference on Application of Mathematics in Engineering and Economics (AMEE’19), Sozopol, Bulgaria, 7–13 June 2019; Volume 2172, p. 050003. [Google Scholar]
- Batiha, I.M.; El-Khazali, R.; Ababneh, O.Y.; Ouannas, A.; Batyha, R.M.; Momani, S. Optimal design of PIρDμ-controller for artificial ventilation systems for COVID-19 patients. AIMS Math. 2023, 8, 657–675. [Google Scholar] [CrossRef]
- Batiha, I.M.; Njadat, S.A.; Batyha, R.M.; Zraiqat, A.; Dababneh, A.; Momani, S. Design Fractional-order PID Controllers for Single-Joint Robot Arm Model. Int. J. Adv. Soft Comput. Appl. 2022, 14, 96–114. [Google Scholar] [CrossRef]
- Momani, S.; Batiha, I.M. Tuning of the Fractional-order PID Controller for some Real-life Industrial Processes Using Particle Swarm Optimization. Prog. Fract. Differ. Appl. 2022, 8, 377–391. [Google Scholar]
- Hammad, M.A. Conformable Fractional Martingales and Some Convergence Theorems. Mathematics 2022, 10, 6. [Google Scholar] [CrossRef]
- Halilu, B.D.; Anene, E.C.; Omigzegba, E.E.; Maijama’a, L.; Baraza, S.A. Optimization of PID controller gains for identifiedmagnetic levitation plant using bacteria foraging algorithm. Int. J. Eng. Mod. Technol. 2019, 5, 12–18. [Google Scholar]
- Munz, M.A.; Halgamuge, S.K.; Alfonso, W.; Caicedo, E.F. Simplifying the bacteria foraging optimization algorithm. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; pp. 1–7. [Google Scholar]
- Krishna, B.T. Studies on fractional order differentiators and integrators: A survey. Signal Process. 2010, 91, 386–426. [Google Scholar] [CrossRef]
- Batyha, R.M. Optimal design of fractional-order PID controllers using bacterial foraging optimization algorithm. Int. J. Adv. Soft Comput. Appl. 2021, 13, 136–149. [Google Scholar]
- Azar, A.T.; Ammar, H.H.; Ibrahim, Z.F.; Ibrahim, H.A.; Mohamed, N.A.; Taha, M.A. Implementation of PID Controller with PSO Tuning for Autonomous Vehicle. In Advances in Intelligent Systems and Computing, Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2019, AISI 2019, Cairo, Egypt, 26–28 October 2019; Hassanien, A., Shaalan, K., Tolba, M., Eds.; Springer: Cham, Switzerland, 2020; Volume 1058. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Population size. | 20 |
| Max. number of iterations. | 100 |
| Range of . | (0, 60] |
| Range of . | (0, 66] |
| Range of . | (0, 61] |
| Range of . | (0, 1) |
| Range of . | (0, 1) |
| Gains/Methods | ZN | CC | BFA | CFE | Oustaloup |
|---|---|---|---|---|---|
| Proportional gain . | 2.5 | 3.02 | 12.73 | 48 | 0.17 |
| Integral gain . | 0.582 | 0.472 | 14.08 | 24.2411 | 9.8834 |
| Differential gain . | 4.271 | 2.81 | 22.50 | 51 | 61 |
| 1 | 1 | 1 | 0.9110 | 0.2823 | |
| 1 | 1 | 1 | 0.7119 | 0.976 |
| Step Response | |||||
|---|---|---|---|---|---|
| Rise time. | 0.2789 | 0.2443 | 0.7812 | 4.0109 | 3.6089 |
| Settling time. | 5.4935 | 5.3397 | 13.7308 | 31.669 | 20.479 |
| Settling minimum. | 0.9029 | 0.9000 | 0.9014 | 0.9001 | 0.9008 |
| Settling maximum. | 1.0004 | 1.0068 | 1.1513 | 1.2346 | 1.1892 |
| Overshoot. | 0.0479 | 0.7059 | 15.1346 | 23.4691 | 18.9203 |
| Undershoot. | 0 | 0 | 0 | 0 | 0 |
| Peak. | 1.0004 | 1.0068 | 1.1513 | 1.2346 | 1.1892 |
| Peak time. | 14.385 | 10.107 | 3.3052 | 10.4523 | 9.5893 |
| Gains/Methods | ZN | CC | BFA | CFE | Oustaloup |
|---|---|---|---|---|---|
| Proportional gain . | 1.94 | 2.22 | 8.46 | 48 | 59 |
| Integral gain . | 1.02 | 1.01 | 10.57 | 24.2411 | 9.8834 |
| Differential gain . | 0.922 | 0.745 | 13.10 | 51 | 61 |
| 1 | 1 | 1 | 0.9110 | 0.821 | |
| 1 | 1 | 1 | 0.7119 | 0.7167 |
| Step Response | |||||
|---|---|---|---|---|---|
| Rise time. | 0.2831 | 0.2316 | 1.0025 | 2.8371 | 2.6644 |
| Settling time. | 1.3539 | 1.2385 | 19.6450 | 26.0728 | 20.0318 |
| Settling minimum. | 0.9056 | 0.9053 | 0.8478 | 0.8669 | 0.8747 |
| Settling maximum. | 1.1989 | 1.2447 | 1.2566 | 1.2999 | 1.2888 |
| Overshoot. | 19.921 | 24.5356 | 25.6579 | 29.9886 | 28.8789 |
| Undershoot. | 0 | 0 | 0 | 0 | 0 |
| Peak. | 1.1989 | 1.2447 | 1.2566 | 1.2999 | 1.2888 |
| Peak time. | 0.6748 | 0.5863 | 2.8777 | 6.2479 | 6.0252 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Batiha, I.M.; Ababneh, O.Y.; Al-Nana, A.A.; Alshanti, W.G.; Alshorm, S.; Momani, S. A Numerical Implementation of Fractional-Order PID Controllers for Autonomous Vehicles. Axioms 2023, 12, 306. https://doi.org/10.3390/axioms12030306
Batiha IM, Ababneh OY, Al-Nana AA, Alshanti WG, Alshorm S, Momani S. A Numerical Implementation of Fractional-Order PID Controllers for Autonomous Vehicles. Axioms. 2023; 12(3):306. https://doi.org/10.3390/axioms12030306
Chicago/Turabian StyleBatiha, Iqbal M., Osama Y. Ababneh, Abeer A. Al-Nana, Waseem G. Alshanti, Shameseddin Alshorm, and Shaher Momani. 2023. "A Numerical Implementation of Fractional-Order PID Controllers for Autonomous Vehicles" Axioms 12, no. 3: 306. https://doi.org/10.3390/axioms12030306