
Aggregative Game for Distributed Charging Strategy of PEVs in a Smart Charging Station
Abstract
:1. Introduction
- (1)
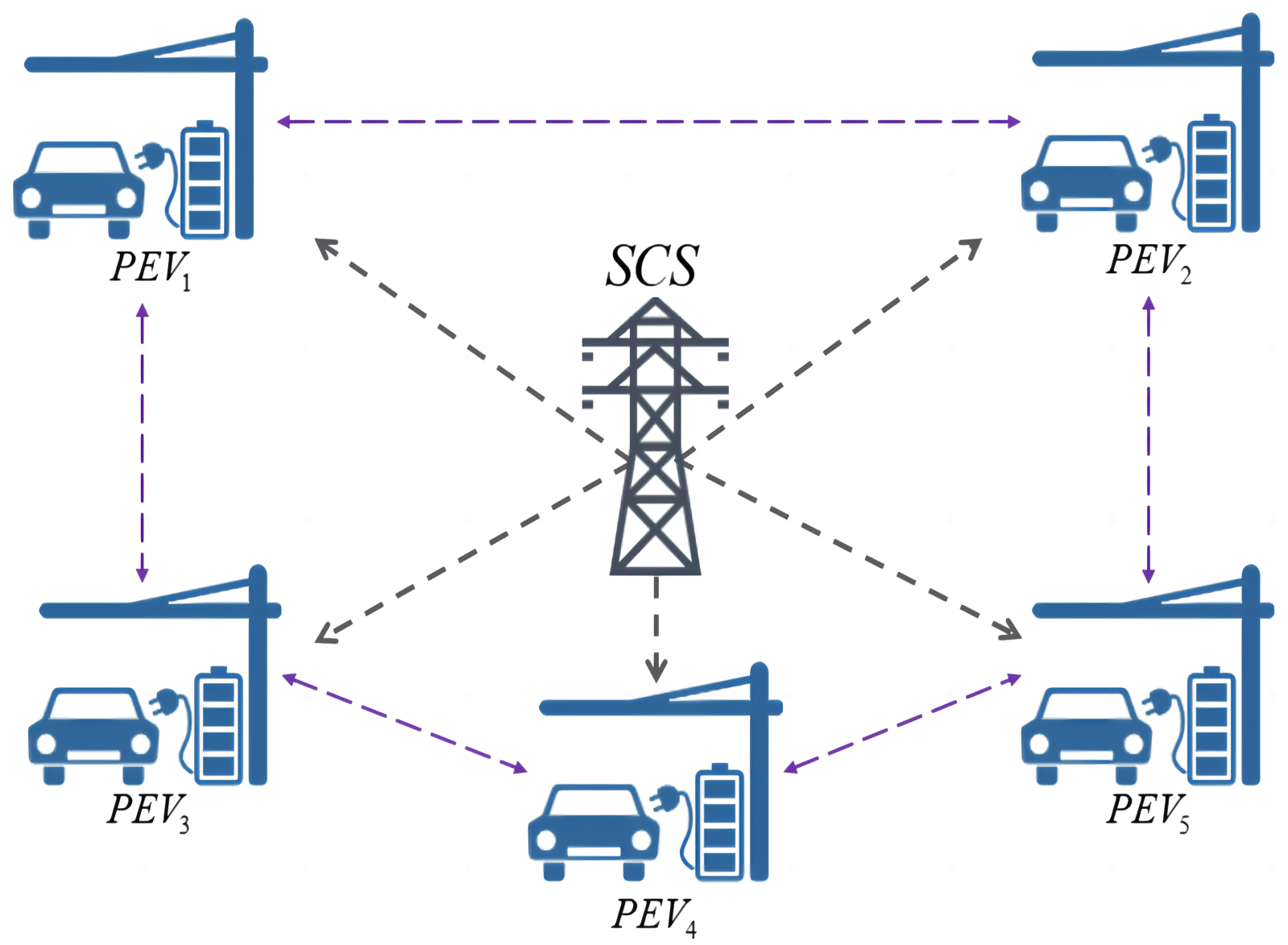
- A new price-driven charging model combining time anxiety and load constraints is constructed to minimize the cost of an individual PEV driver within the framework of an aggregative game. In particular, as everyone only knows the final summation result, not the specific information, the aggregation game can better protect the privacy of drivers.
- (2)
- Load constraints are proposed to protect the safety of SCS. Then, four PEV driver behaviors are proposed based on different time anxiety states and load constraints. Meanwhile, the effects of time anxiety under four different driver behaviors are compared, and the effects of uncertain occurrence events are reduced by the charging strategy.
- (3)
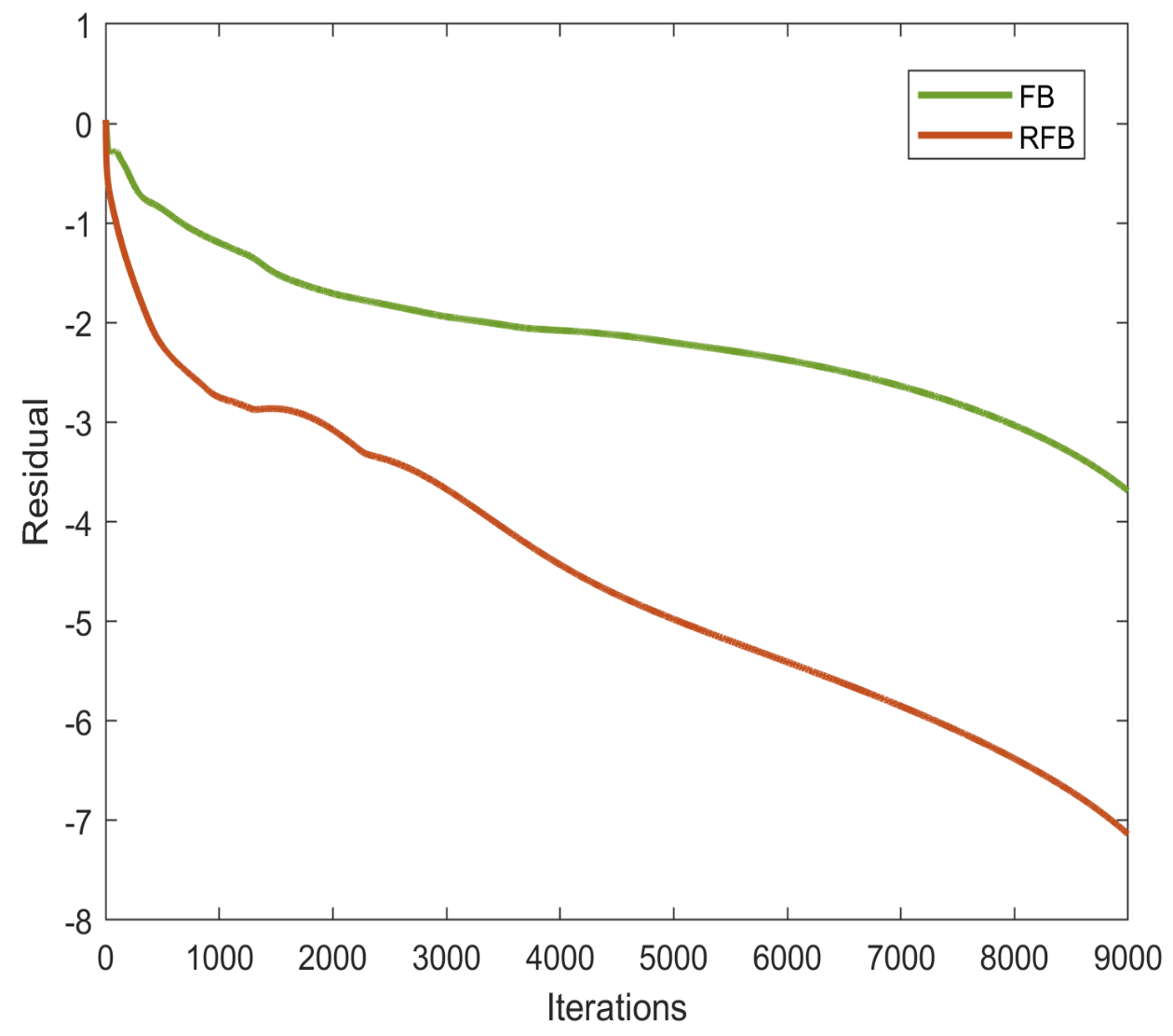
- A distributed reflected forward–backward algorithm is designed to seek the generalized Nash equilibria of the model. The proposed algorithm seeks its optimal response charging strategy regarding the current load and time anxiety in the electric grid, thus preventing overload in the smart charging station and mitigating the impact of uncertain events that may occur at the PEV charging time. The algorithm obtains an improvement in significant convergence compared to the numerical values of the FB algorithm [19].
2. System Model and Problem Formulation
2.1. Feasible Charging Coordination Constraint Profiles
2.1.1. Battery Capacity Constraint for PEV i
2.1.2. Charging Constraint for PEVs
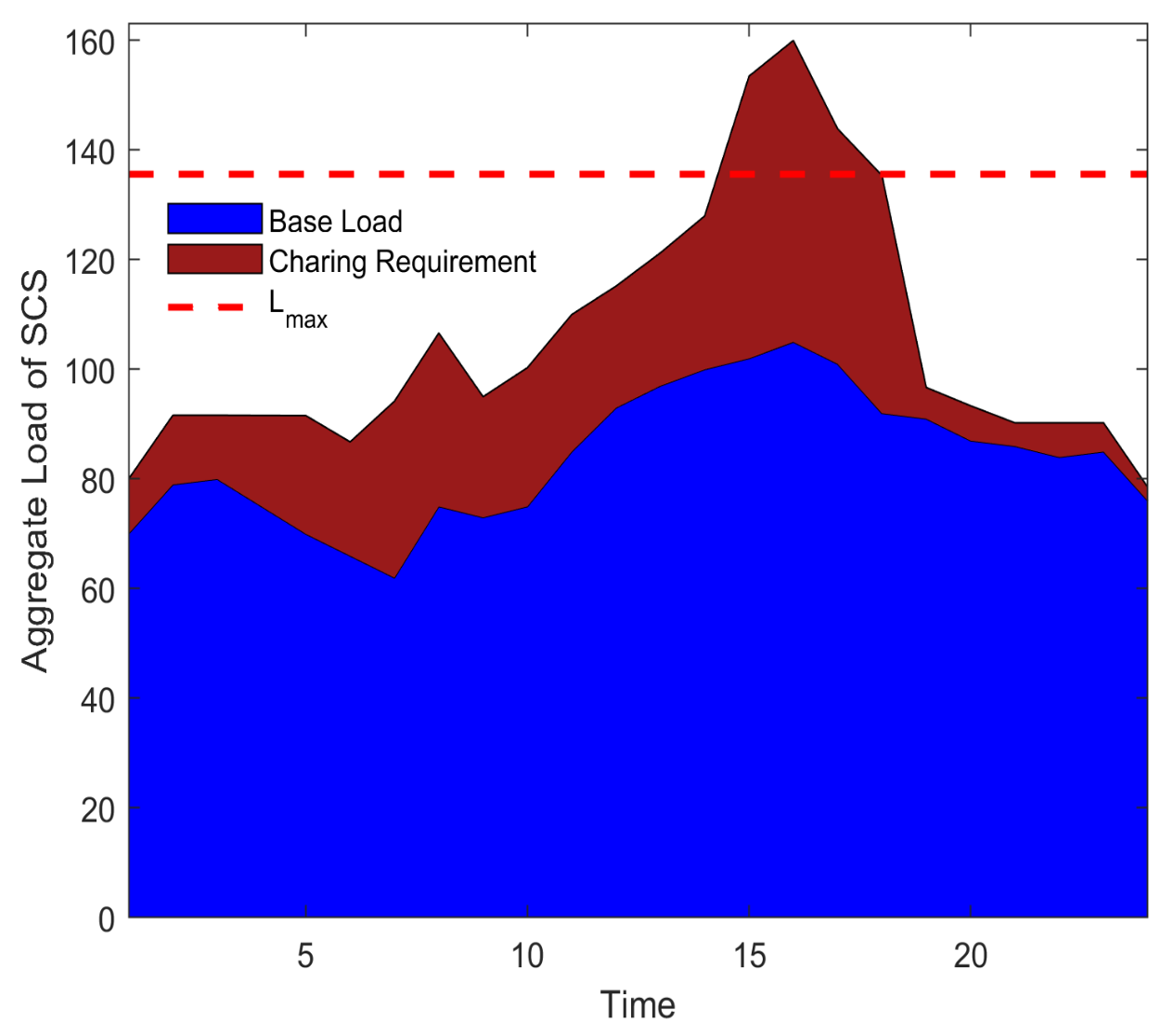
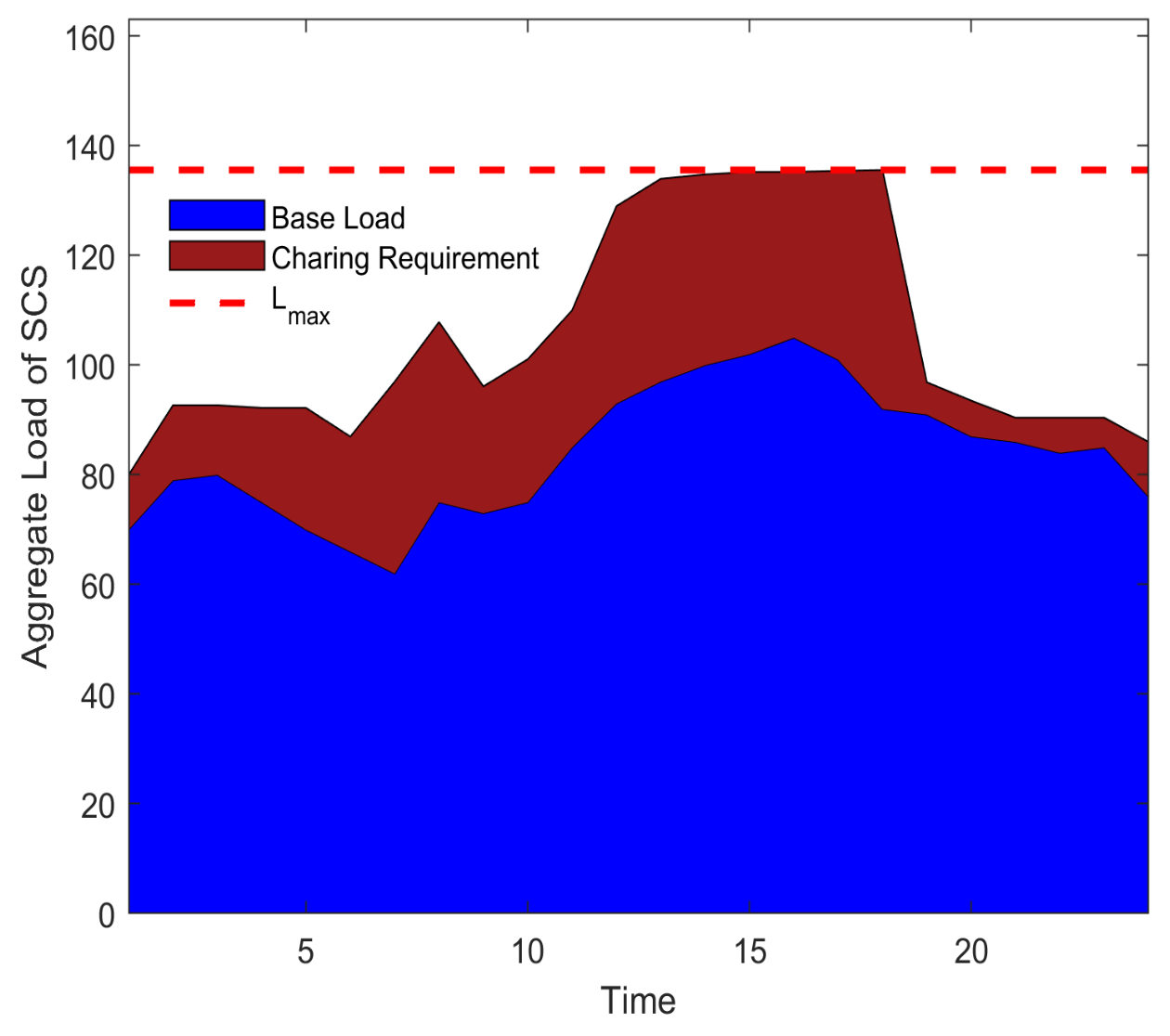
2.1.3. Overload Constraint for Charging PEVs
2.1.4. Feasible Charging Profiles
2.2. Cost Function of PEVs
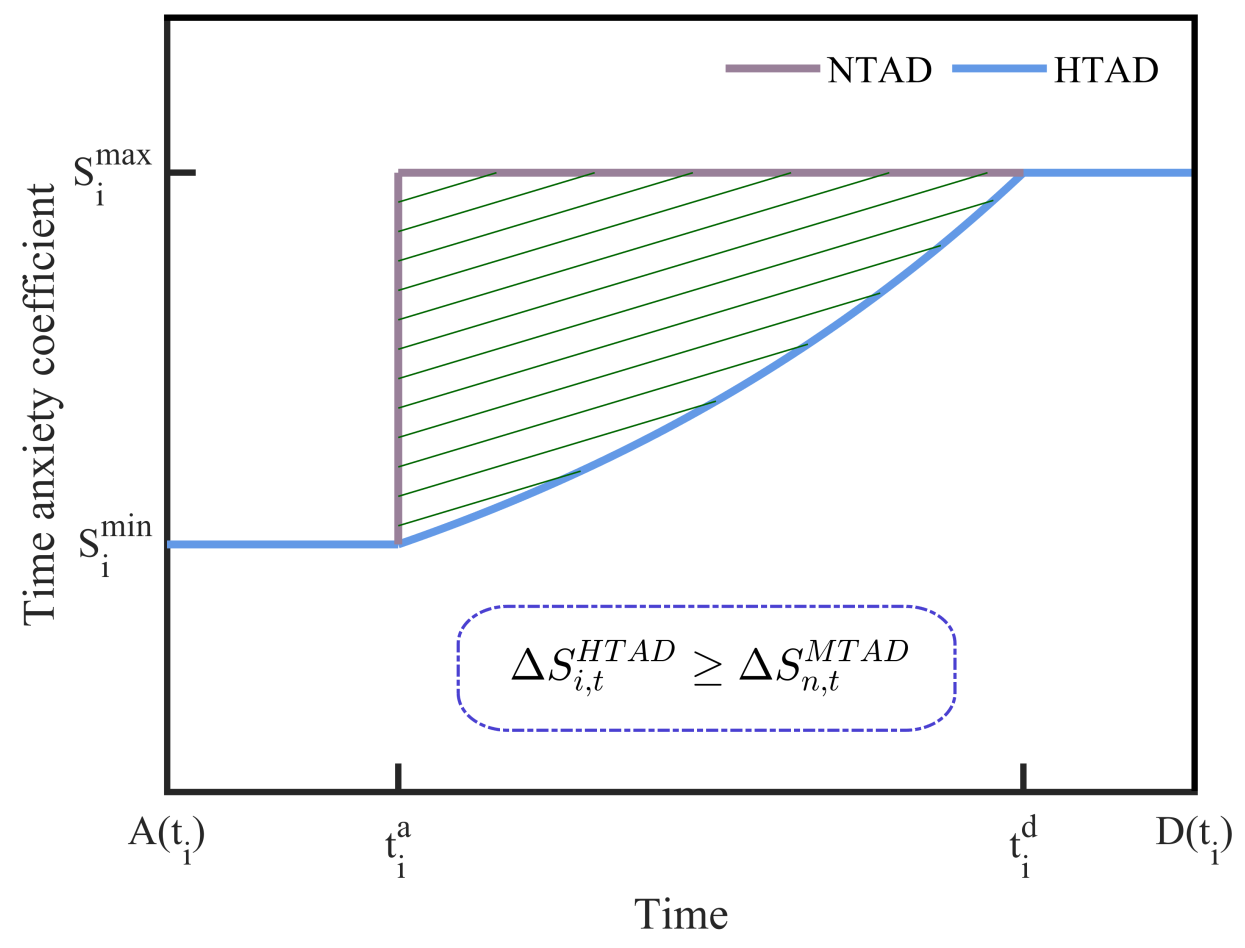
2.3. Time Anxiety for Drivers
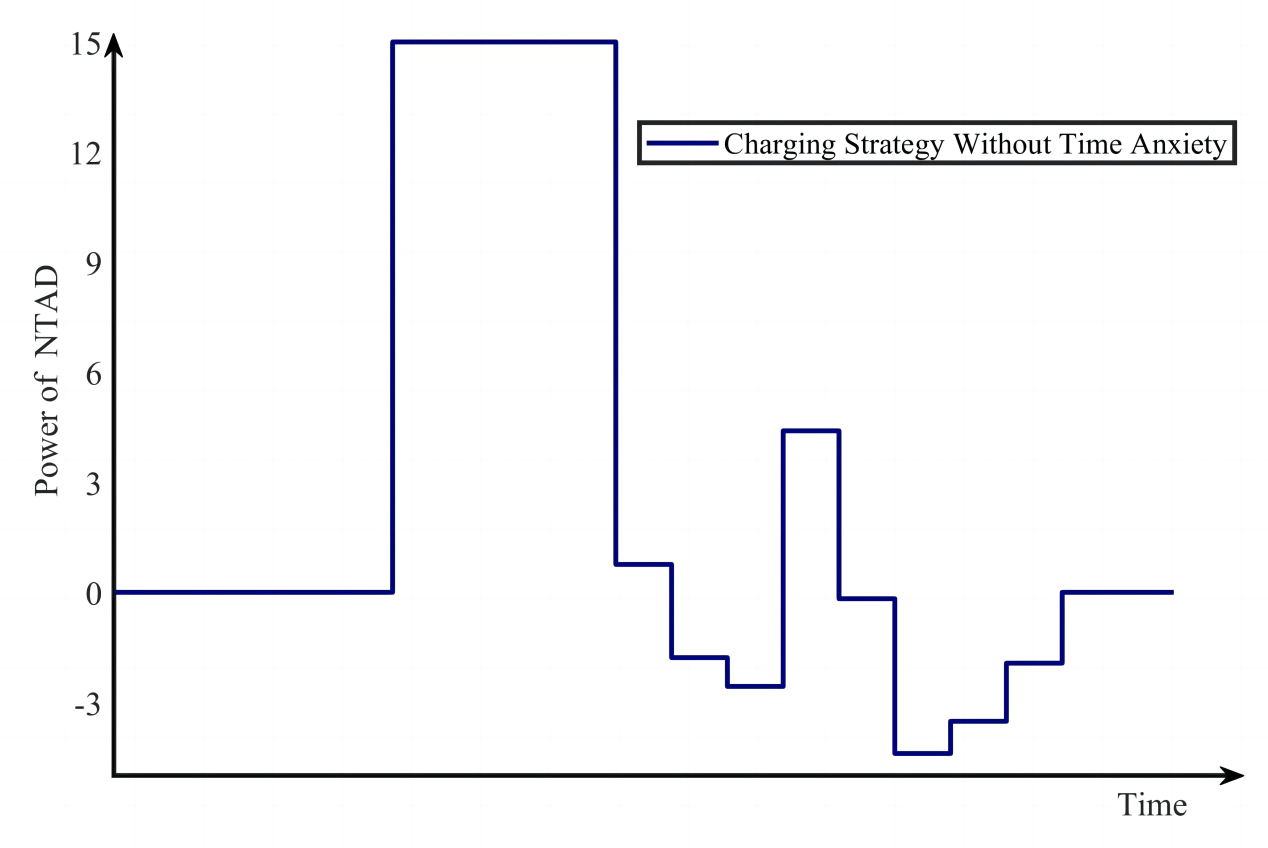
- (1)
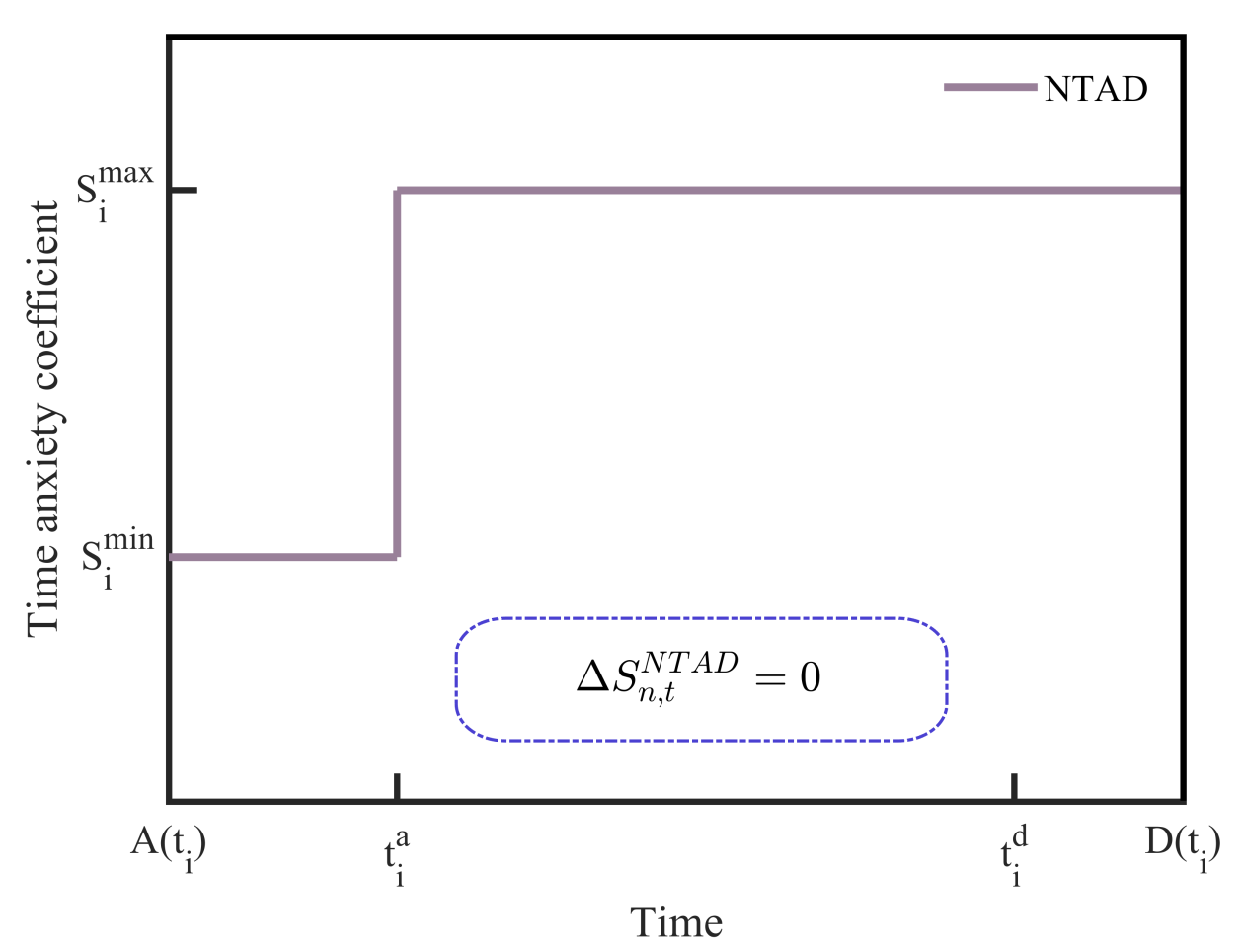
- Non-time-anxious driver (NTAD): This type of driver reaches an anxious time directly after entering a state of peak anxiety (Figure 2).
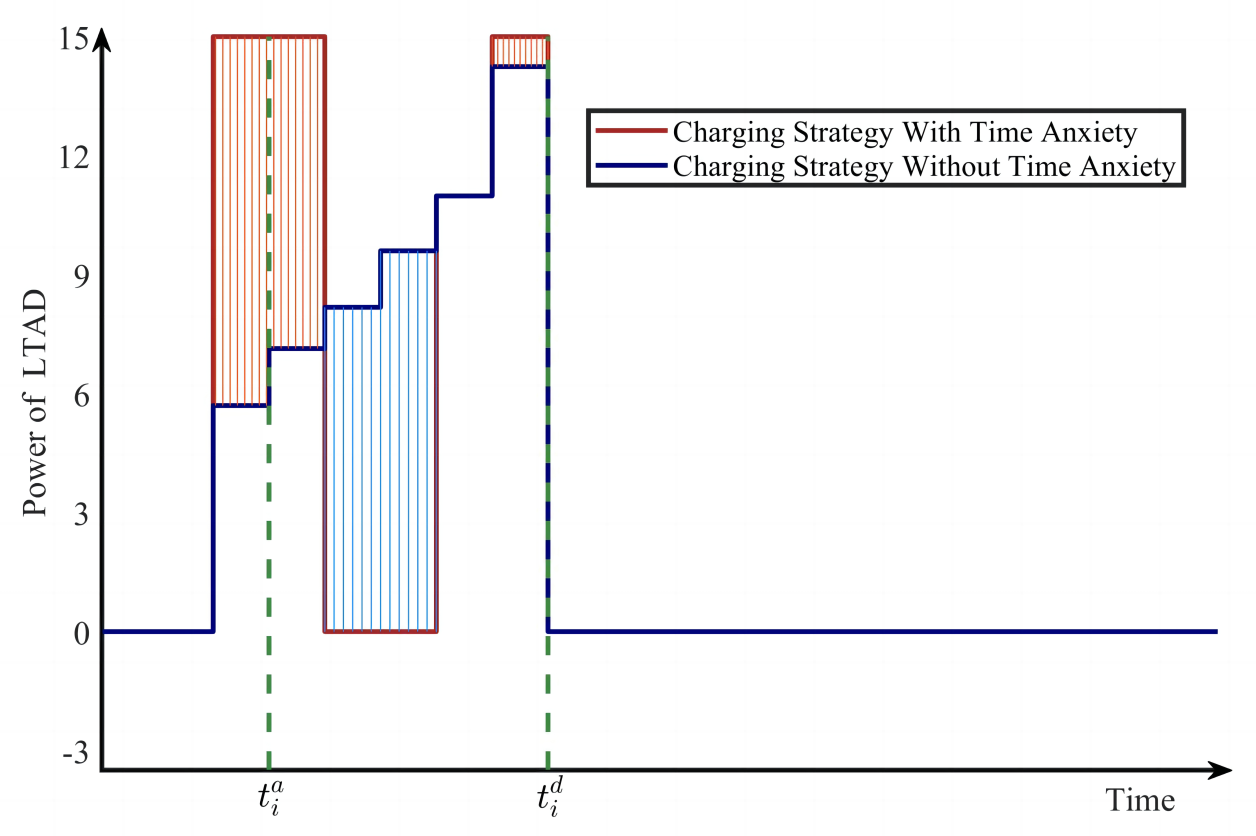
- (2)
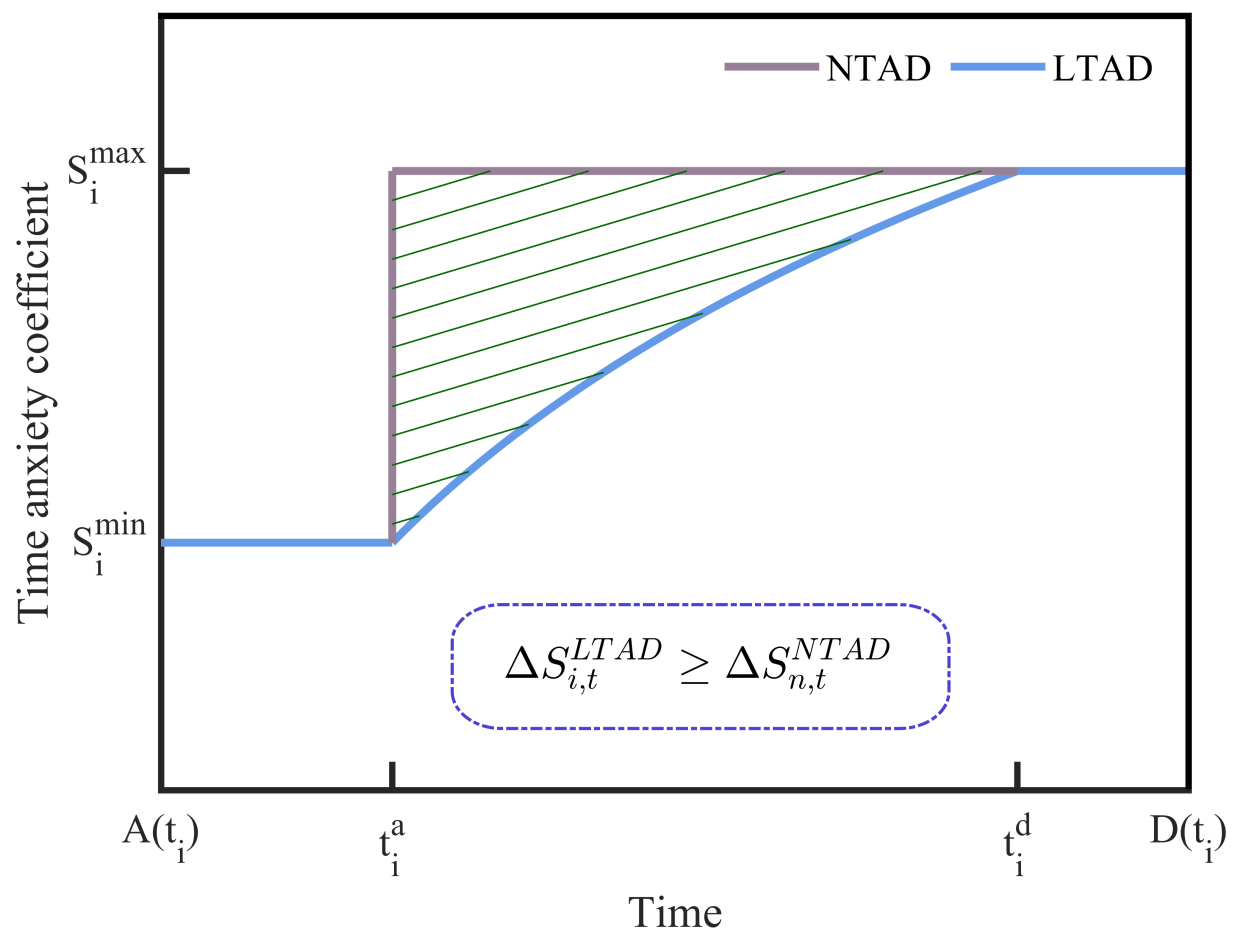
- Less time-anxious driver (LTAD): This type of driver has anxiety values that rise quickly and then slowly after entering the anxious time. The rise is faster and then slower (Figure 3).
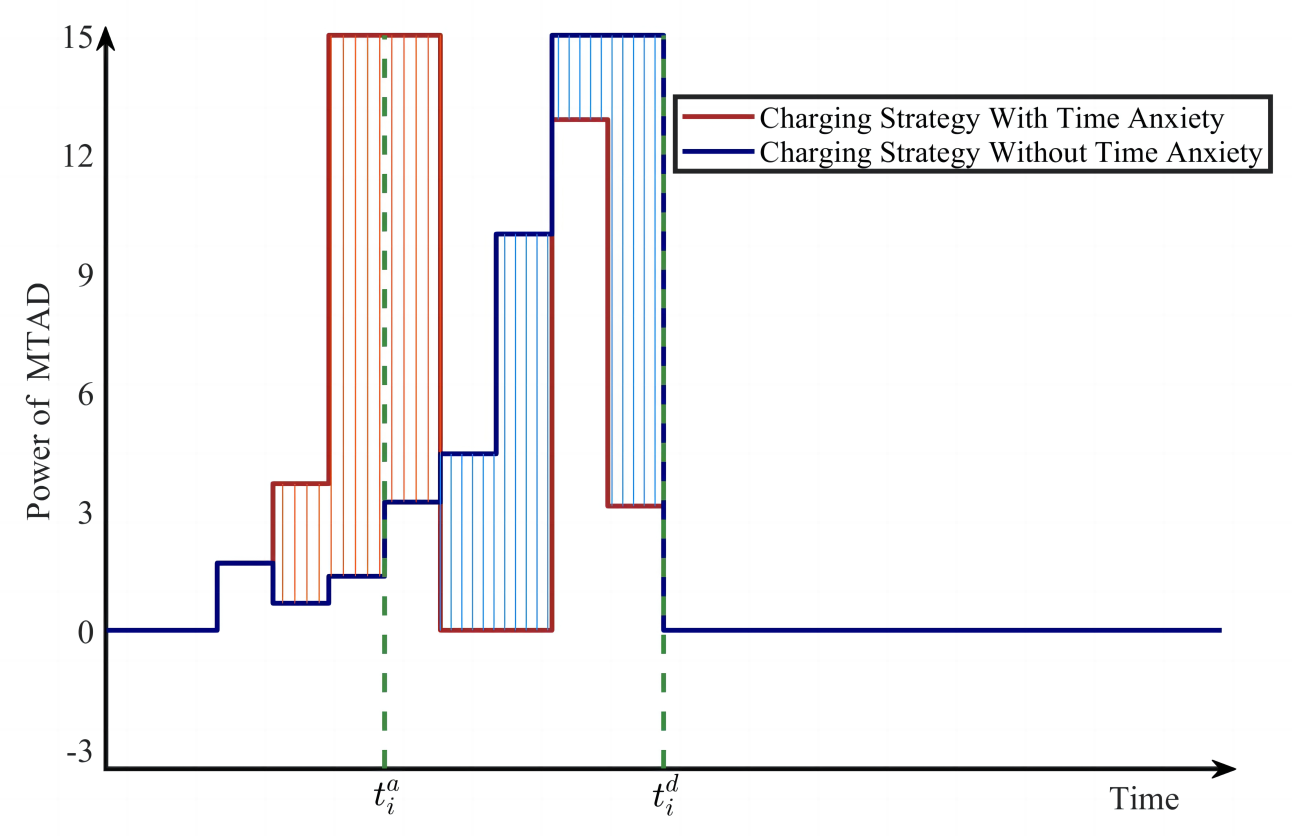
- (3)
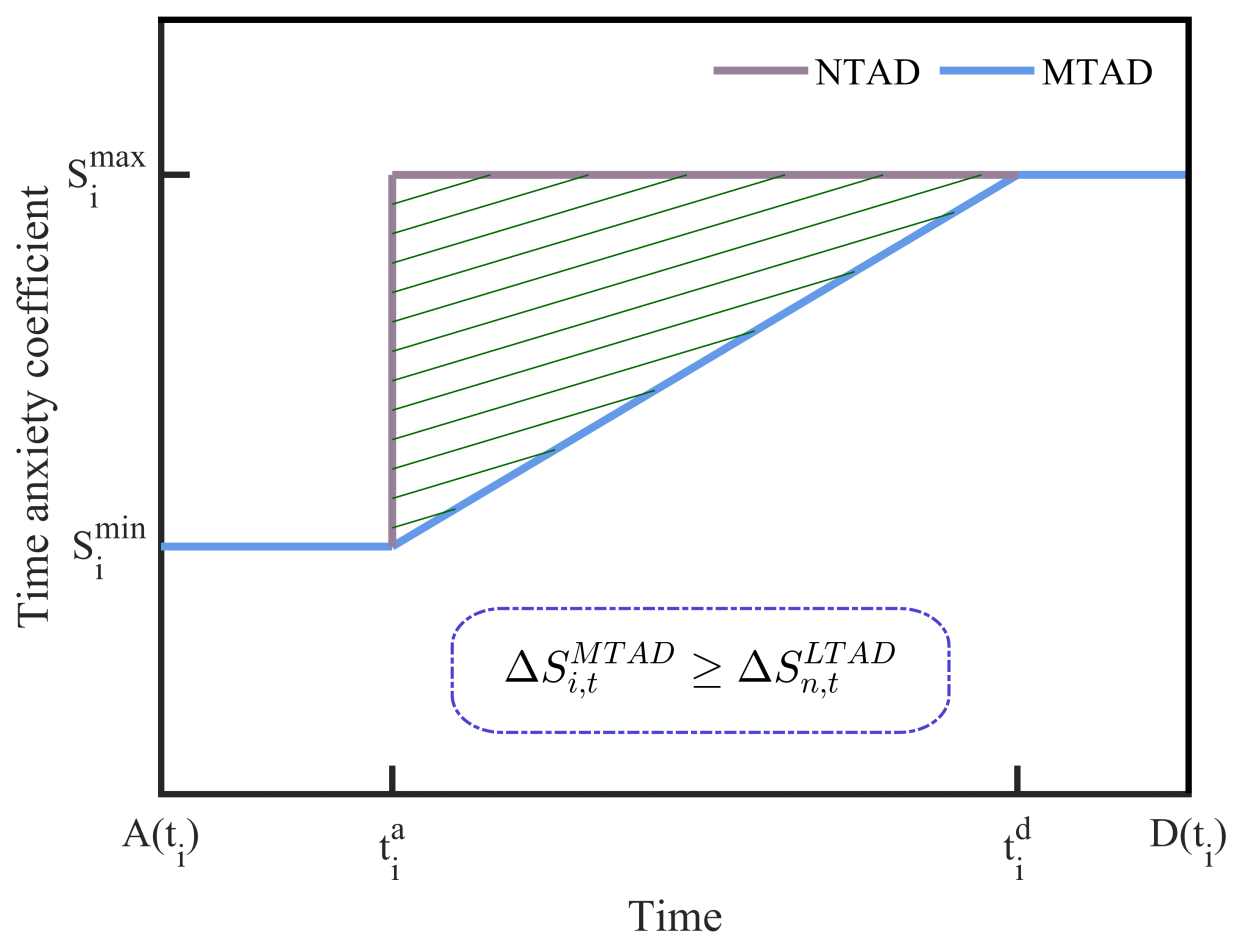
- Mid-time-anxious driver (MTAD): This type of driver enters anxious time with anxiety values increasing at a uniform rate (Figure 4).
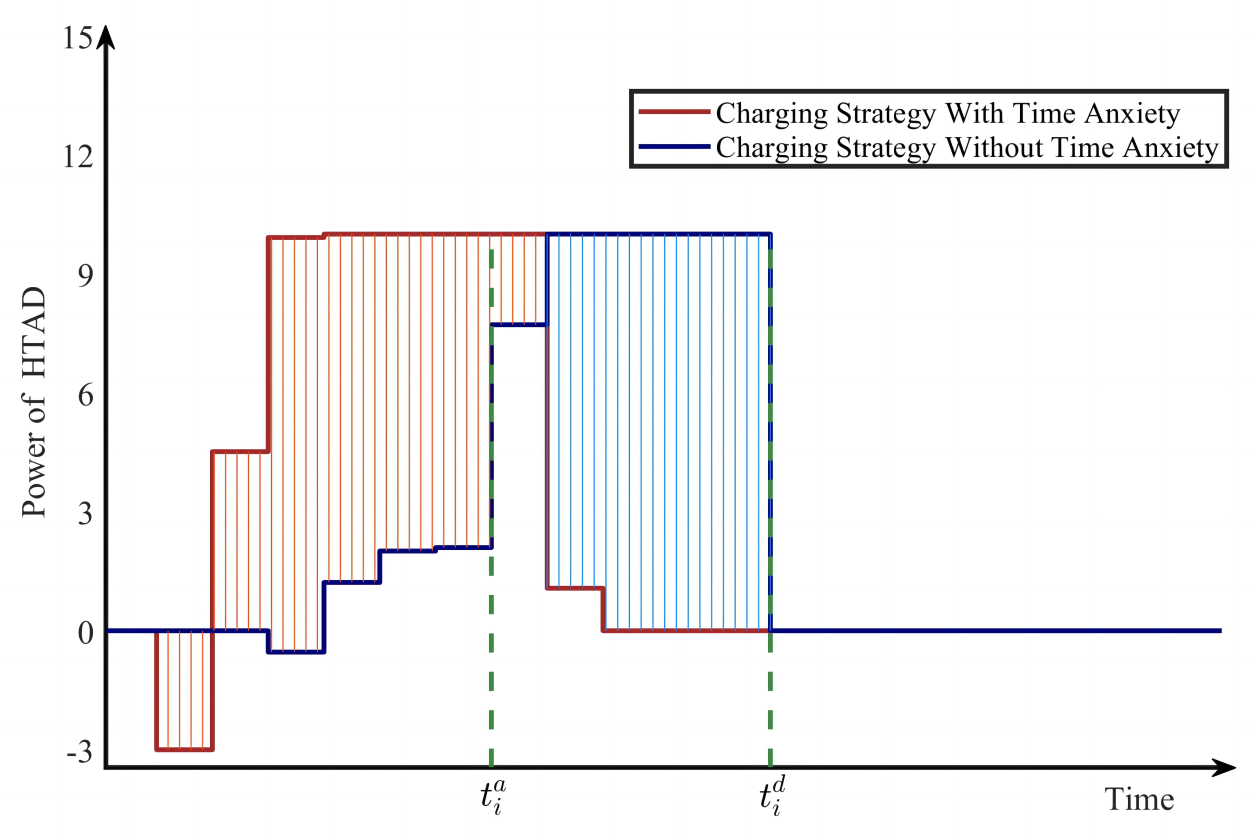
- (4)
- High-time-anxious driver (HTAD): This type of driver has anxiety values that rise slowly and then quickly after entering anxious time. The rise is slow and then fast (Figure 5).
3. Distributed Charging Strategy
3.1. Game Model
3.2. Distributed Algorithm
| Algorithm 1: Distributed charging strategy with reflected forward-backward algorithm. |
|
4. Simulation and Numerical Results
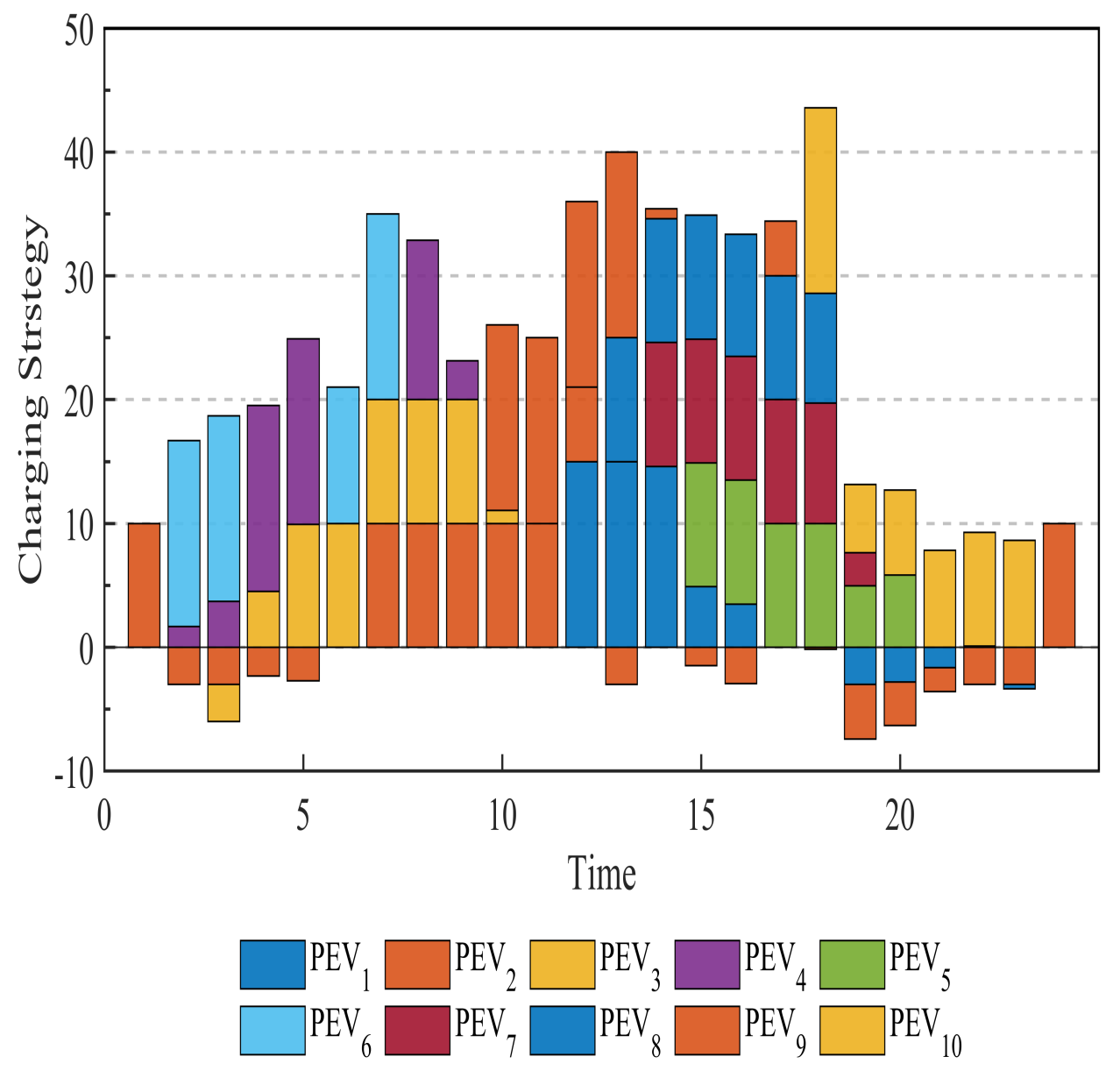
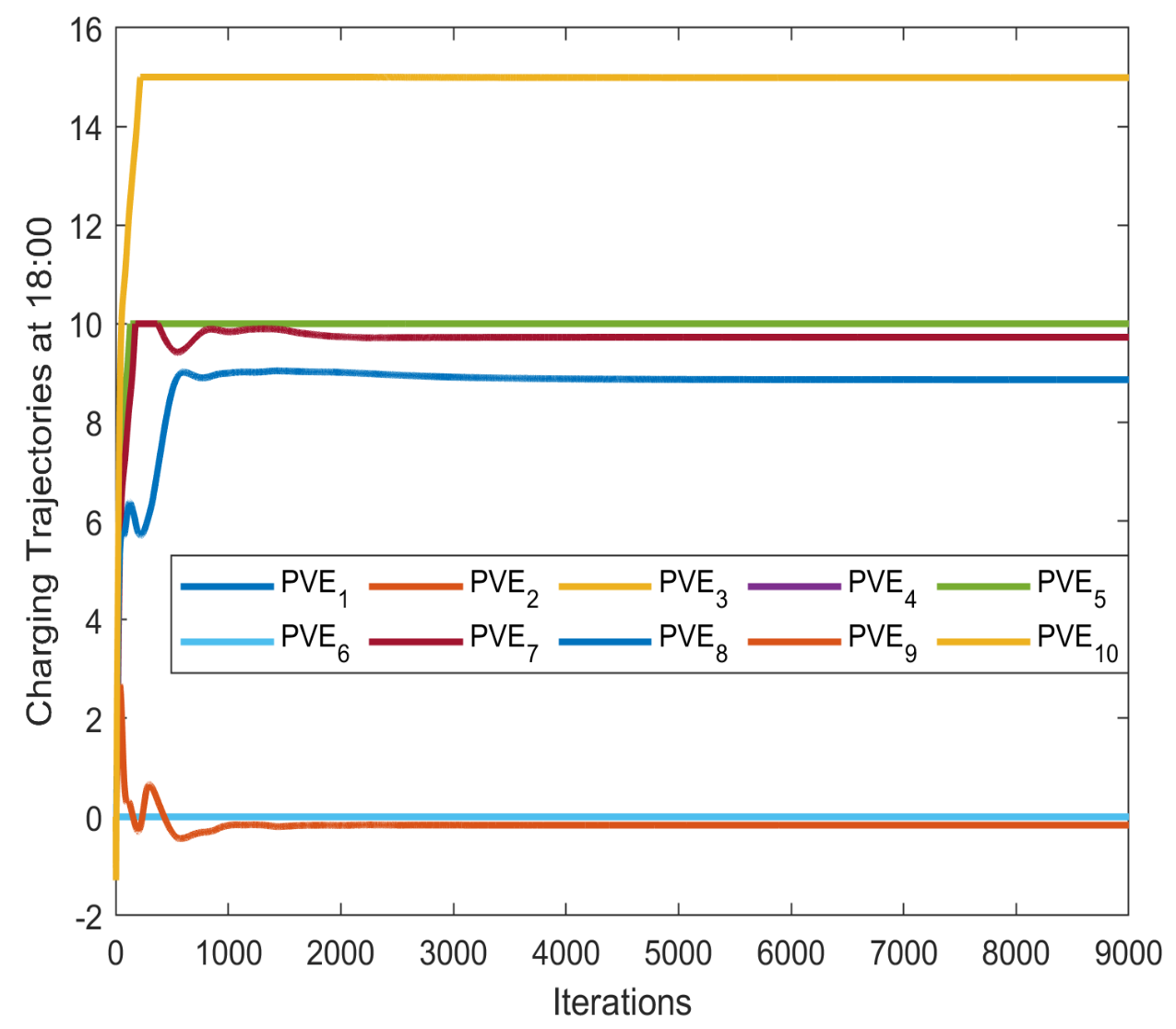
4.1. Overload Control for 10 PEVs
4.2. Time Anxiety for PEVs
4.3. Convergence Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Poornesh, K.; Nivya, K.P.; Sireesha, K. A comparative study on electric vehicle and internal combustion engine vehicles. In Proceedings of the 2020 International Conference on Smart Electronics and Communication (ICOSEC), Trichy, India, 10–12 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1179–1183. [Google Scholar]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2010, 26, 802–810. [Google Scholar] [CrossRef]
- Fischer, D.; Harbrecht, A.; Surmann, A.; McKenna, R. Electric vehicles’ impacts on residential electric local profiles—A stochastic modelling approach considering socio-economic, behavioural and spatial factors. Appl. Energy 2019, 233, 644–658. [Google Scholar] [CrossRef]
- Bilh, A.; Naik, K.; El-Shatshat, R. A novel online charging algorithm for electric vehicles under stochastic net-load. IEEE Trans. Smart Grid 2016, 9, 1787–1799. [Google Scholar] [CrossRef]
- Vatanparvar, K.; Faezi, S.; Burago, I.; Levorato, M.; Al Faruque, M.A. Extended Range Electric Vehicle With Driving Behavior Estimation in Energy Management. IEEE Trans. Smart Grid 2019, 10, 2959–2968. [Google Scholar] [CrossRef]
- Wang, C.; Zhou, Y.; Wu, J.; Wang, J.; Zhang, Y.; Wang, D. Robust-index method for household load scheduling considering uncertainties of customer behavior. IEEE Trans. Smart Grid 2015, 6, 1806–1818. [Google Scholar] [CrossRef]
- Alsabbagh, A.; Wu, B.; Ma, C. Distributed electric vehicles charging management considering time anxiety and customer behaviors. IEEE Trans. Ind. Inform. 2020, 17, 2422–2431. [Google Scholar] [CrossRef]
- Yan, Q.; Zhang, B.; Kezunovic, M. Optimized operational cost reduction for an EV charging station integrated with battery energy storage and PV generation. IEEE Trans. Smart Grid 2018, 10, 2096–2106. [Google Scholar] [CrossRef]
- Abdelaziz, M.M.A.; Shaaban, M.F.; Farag, H.E.; El-Saadany, E.F. A multistage centralized control scheme for islanded microgrids with PEVs. IEEE Trans. Sustain. Energy 2014, 5, 927–937. [Google Scholar] [CrossRef]
- Yao, L.; Lim, W.H.; Tsai, T.S. A Real-Time Charging Scheme for Demand Response in Electric Vehicle Parking Station. IEEE Trans. Smart Grid 2017, 8, 52–62. [Google Scholar] [CrossRef]
- Li, J.; Li, C.; Xu, Y.; Dong, Z.Y.; Wong, K.P.; Huang, T. Noncooperative Game-Based Distributed Charging Control for Plug-In Electric Vehicles in Distribution Networks. IEEE Trans. Ind. Inform. 2018, 14, 301–310. [Google Scholar] [CrossRef]
- Gan, L.; Topcu, U.; Low, S.H. Optimal decentralized protocol for electric vehicle charging. IEEE Trans. Power Syst. 2013, 28, 940–951. [Google Scholar] [CrossRef]
- Paccagnan, D.; Gentile, B.; Parise, F.; Kamgarpour, M.; Lygeros, J. Nash and wardrop equilibria in aggregative games with coupling constraints. IEEE Trans. Autom. Control 2018, 64, 1373–1388. [Google Scholar]
- Savadkoohi, S.J.S.; Kebriaei, H.; Aminifar, F. Aggregative Game for Charging Coordination of PEVs in a Network of Parking Lots. In Proceedings of the 2019 Smart Grid Conference (SGC), Tehran, Iran, 18–19 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Li, C.; Liu, C.; Deng, K.; Yu, X.; Huang, T. Data-Driven Charging Strategy of PEVs Under Transformer Aging Risk. IEEE Trans. Control. Syst. Technol. 2018, 26, 1386–1399. [Google Scholar] [CrossRef]
- Alsabbagh, A.; Yin, H.; Ma, C. Distributed Electric Vehicles Charging Management with Social Contribution Concept. IEEE Trans. Ind. Inform. 2020, 16, 3483–3492. [Google Scholar] [CrossRef]
- Gadjov, D.; Pavel, L. Distributed GNE seeking over networks in aggregative games with coupled constraints via forward-backward operator splitting. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019; pp. 5020–5025. [Google Scholar]
- Cevher, V.; Vũ, B.C. A reflected forward-backward splitting method for monotone inclusions involving Lipschitzian operators. Set-Valued Var. Anal. 2021, 29, 163–174. [Google Scholar]
- Franci, B.; Staudigl, M.; Grammatico, S. Distributed forward-backward (half) forward algorithms for generalized Nash equilibrium seeking. In Proceedings of the 2020 European Control Conference (ECC), Saint Petersburg, Russia, 12–15 May 2020; pp. 1274–1279. [Google Scholar]
- Wan, Y.; Qin, J.; Li, F.; Yu, X.; Kang, Y. Game theoretic-based distributed charging strategy for PEVs in a smart charging station. IEEE Trans. Smart Grid 2020, 12, 538–547. [Google Scholar] [CrossRef]
- Jasim, A.M.; Jasim, B.H.; Neagu, B.C.; Alhasnawi, B.N. Efficient Optimization Algorithm-Based Demand-Side Management Program for Smart Grid Residential Load. Axioms 2023, 12, 33. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, R.; Liang, H. A stochastic game approach for PEV charging station operation in smart grid. IEEE Trans. Ind. Informatics 2017, 14, 969–979. [Google Scholar] [CrossRef]
- Ma, Z.; Zou, S.; Liu, X. A distributed charging coordination for large-scale plug-in electric vehicles considering battery degradation cost. IEEE Trans. Control. Syst. Technol. 2015, 23, 2044–2052. [Google Scholar] [CrossRef]
- Ghavami, A.; Kar, K.; Gupta, A. Decentralized Charging of Plug-in Electric Vehicles With Distribution Feeder Overload Control. IEEE Trans. Autom. Control. 2016, 61, 3527–3532. [Google Scholar] [CrossRef]
- Pourakbari-Kasmaei, M.; Contreras, J.; Mantovani, J.R.S. A demand power factor-based approach for finding the maximum loading point. Electr. Power Syst. Res. 2017, 151, 283–295. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PEV i | ||||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 53 | 5 | 75 | 15 | 12 | 17 | ||
| 2 | 6 | 56 | 5 | 80 | 10 | 22 | 14 | |
| 3 | 8 | 5 | 75 | 10 | 3 | 12 | ||
| 4 | 5 | 70 | 15 | 2 | 10 | |||
| 5 | 51 | 5 | 65 | 10 | 15 | 21 | ||
| 6 | 56 | 5 | 75 | 15 | 2 | 8 | ||
| 7 | 5 | 65 | 10 | 4 | 20 | |||
| 8 | 9 | 51 | 5 | 80 | 10 | 13 | 24 | |
| 9 | 5 | 70 | 15 | 10 | 22 | |||
| 10 | 53 | 5 | 75 | 15 | 18 | 24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, T.; Li, H.; Zheng, L. Aggregative Game for Distributed Charging Strategy of PEVs in a Smart Charging Station. Axioms 2023, 12, 186. https://doi.org/10.3390/axioms12020186
Kang T, Li H, Zheng L. Aggregative Game for Distributed Charging Strategy of PEVs in a Smart Charging Station. Axioms. 2023; 12(2):186. https://doi.org/10.3390/axioms12020186
Chicago/Turabian StyleKang, Ti, Huaqing Li, and Lifeng Zheng. 2023. "Aggregative Game for Distributed Charging Strategy of PEVs in a Smart Charging Station" Axioms 12, no. 2: 186. https://doi.org/10.3390/axioms12020186