
Stability of a Nonlinear ML-Nonsingular Kernel Fractional Langevin System with Distributed Lags and Integral Control


Abstract
:1. Introduction
2. Preliminaries
- (1)
- nonnegativity, i.e., , and the identity holds only if , ;
- (2)
- commutativity, i.e., , ;
- (3)
- trigonometric inequality, i.e., , .
- (a)
- For all , there exists a constant such that ;
- (b)
- For some , there exists an integer such that .
- (i)
- , as , and ;
- (ii)
- There exists a unique such that ;
- (iii)
- If , then .
3. Existence and Stability
- (1)
- , ;
- (2)
- , ;
- (3)
- .
- (1)
- , ;
- (2)
- , ;
- (3)
- .
- (B1)
- , , , are some constants and satisfy , , and ;
- (B2)
- , , , , , the integral control be Riemann–Stieltjes integral, and be the bounded variation;
- (B3)
- , there have two functions satisfying
- (B4)
- , where , and .
4. An Application
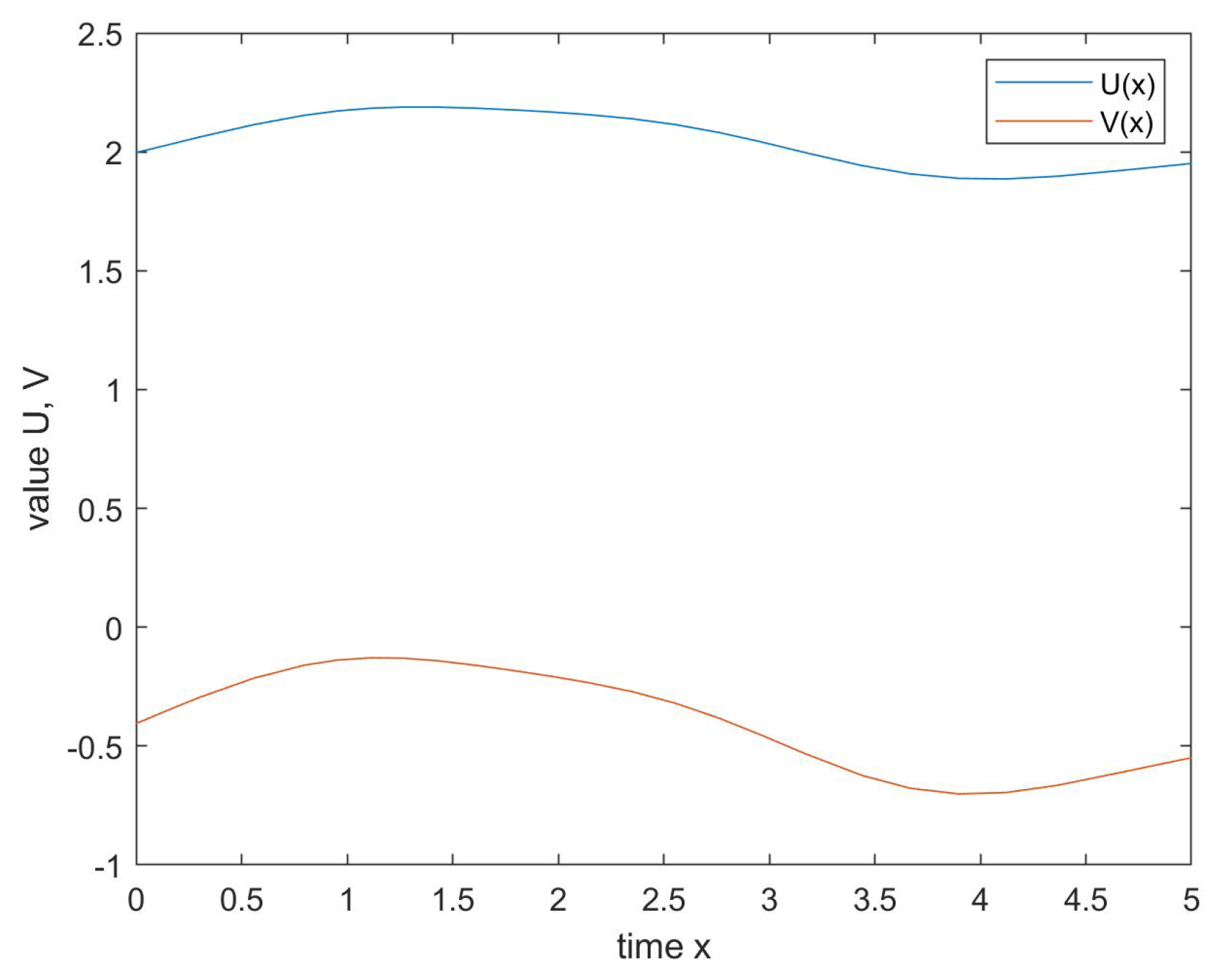
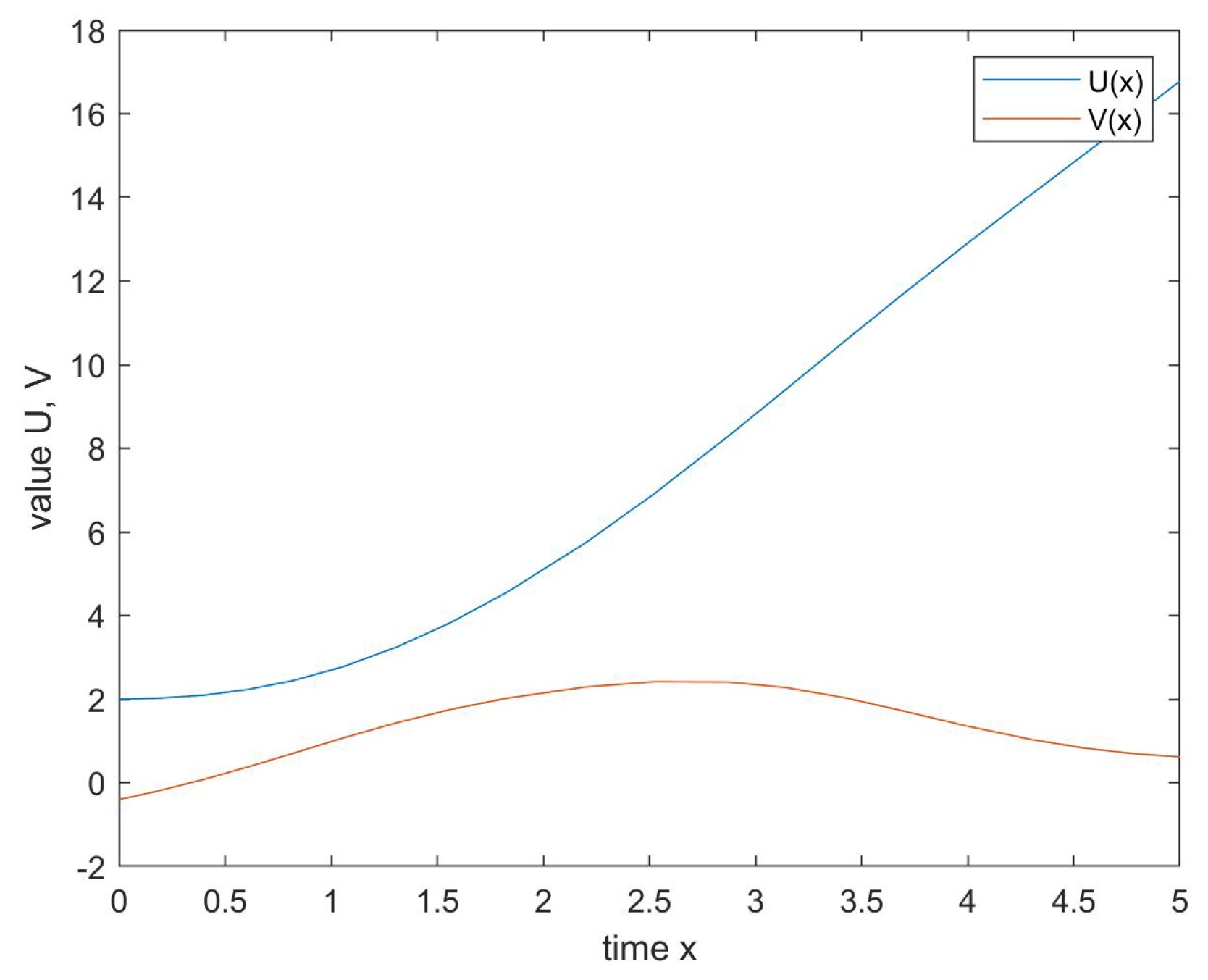
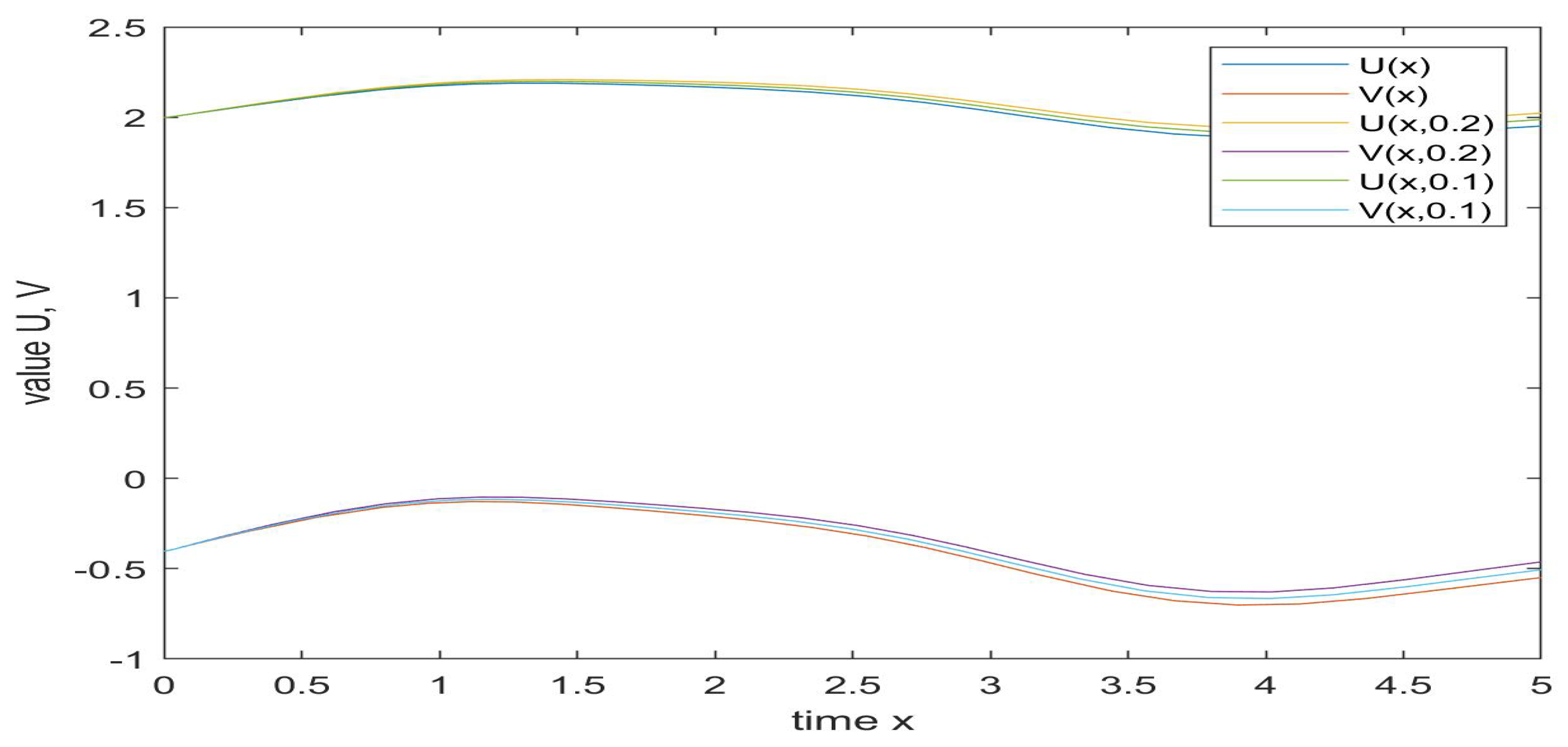
4.1. Theoretical Analysis
4.2. Numerical Simulation
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Beck, C.; Roepstorff, G. From dynamical systems to the langevin equation. Physica A 1987, 145, 1–14. [Google Scholar] [CrossRef]
- Coffey, W.; Kalmykov, Y.; Waldron, J. The Langevin Equation; World Scientific: Singapore, 2004. [Google Scholar]
- Kubo, R. The fluctuation-dissipation theorem. Rep. Prog. Phys. 1966, 29, 255. [Google Scholar] [CrossRef] [Green Version]
- Kubo, R.; Toda, M.; Hashitsume, N. Statistical Physics II; Springer: Berlin, Germany, 1991. [Google Scholar]
- Eab, C.; Lim, S. Fractional generalized langevin equation approach to single-file diffusion. Physica A 2010, 389, 2510–2521. [Google Scholar] [CrossRef] [Green Version]
- Sandev, T.; Tomovski, Z. Langevin equation for a free particle driven by power law type of noises. Phys. Lett. A 2014, 378, 1–9. [Google Scholar] [CrossRef]
- Abbas, M.; Ragusa, M. Solvability of Langevin equations with two Hadamard fractional derivatives via Mittag-Leffler functions. Appl. Anal. 2022, 101, 3231–3245. [Google Scholar] [CrossRef]
- Abbas, M. Investigation of Langevin equation in terms of generalized proportional fractional derivatives with respect to another function. Filomat 2021, 35, 4073–4085. [Google Scholar] [CrossRef]
- Ulam, S. A Collection of Mathematical Problems-Interscience Tracts in Pure and Applied Mathmatics; Interscience: New York, NY, USA, 1906. [Google Scholar]
- Hyers, D. On the stability of the linear functional equation. Proc. Nat. Acad. Sci. USA 1941, 27, 2222–2240. [Google Scholar] [CrossRef] [Green Version]
- Rezaei, H.; Jung, S.; Rassias, T. Laplace transform and Hyers-Ulam stability of linear differential equations. J. Math. Anal. Appl. 2013, 403, 244–251. [Google Scholar] [CrossRef]
- Wang, C.; Xu, T. Hyers-Ulam stability of fractional linear differential equations involving Caputo fractional derivatives. Appl. Math.-Czech. 2015, 60, 383–393. [Google Scholar] [CrossRef] [Green Version]
- Haq, F.; Shah, K.; Rahman, G. Hyers-Ulam stability to a class of fractional differential equations with boundary conditions. Int. J. Appl. Comput. Math. 2017, 3, 1135–1147. [Google Scholar] [CrossRef]
- Ibrahim, R. Generalized Ulam-Hyers stability for fractional differential equations. Int. J. Math. 2014, 23, 9. [Google Scholar] [CrossRef] [Green Version]
- Yu, X. Existence and β-Ulam-Hyers stability for a class of fractional differential equations with non-instantaneous impulses. Adv. Differ. Equ. 2015, 2015, 104. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Yu, X. Stability of nonlocal fractional Langevin differential equations involving fractional integrals. J. Appl. Math. Comput. 2017, 53, 599–611. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Progr. Fract. Differ. App. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef] [Green Version]
- Sadeghi, S.; Jafari, H.; Nemati, S. Operational matrix for Atangana-Baleanu derivative based on Genocchi polynomials for solving FDEs. Chaos Solit. Fract. 2020, 135, 109736. [Google Scholar] [CrossRef]
- Ganji, R.M.; Jafari, H.; Baleanu, D. A new approach for solving multi variable orders differential equations with Mittag-Leffler kernel. Chaos Solit. Fract. 2020, 130, 109405. [Google Scholar] [CrossRef]
- Tajadodi, H. A Numerical approach of fractional advection-diffusion equation with Atangana-Baleanu derivative. Chaos Solit. Fract. 2020, 130, 109527. [Google Scholar] [CrossRef]
- Khan, H.; Khan, A.; Jarad, F.; Shah, A. Existence and data dependence theorems for solutions of an ABC-fractional order impulsive system. Chaos Solit. Fract. 2020, 131, 109477. [Google Scholar] [CrossRef]
- Abbas, M. Nonlinear Atangana-Baleanu fractional differential equations involving the Mittag CLeffler integral operator. Mem. Differ. Equ. Math. 2021, 83, 1–11. [Google Scholar]
- Khan, H.; Li, Y.; Khan, A.; Khan, A. Existence of solution for a fractional-order Lotka-Volterra reaction-diffusion model with Mittag-Leffler kernel. Math. Meth. Appl. Sci. 2019, 42, 3377–3387. [Google Scholar] [CrossRef]
- Acay, B.; Bas, E.; Abdeljawad, T. Fractional economic models based on market equilibrium in the frame of different type kernels. Chaos Solit. Fract. 2020, 130, 109438. [Google Scholar] [CrossRef]
- Khan, A.; Gómez-Aguilar, J.F.; Khan, T.S.; Khan, H. Stability analysis and numerical solutions of fractional order HIV/AIDS model. Chaos Solit. Fract. 2019, 122, 119–128. [Google Scholar] [CrossRef]
- Khan, H.; Gómez-Aguilar, J.F.; Alkhazzan, A.; Khan, A. A fractional order HIV-TB coinfection model with nonsingular Mittag-Leffler Law. Math. Method Appl. Sci. 2020, 43, 3786–3806. [Google Scholar] [CrossRef]
- Koca, I. Modelling the spread of Ebola virus with Atangana-Baleanu fractional operators. Eur. Phys. J. Plus 2018, 133, 100. [Google Scholar] [CrossRef]
- Morales-Delgado, V.F.; Gómez-Aguilar, J.F.; Taneco-Hernández, M.A.; Escobar-Jiménez, R.F.; Olivares-Peregrino, V.H. Mathematical modeling of the smoking dynamics using fractional differential equations with local and nonlocal kernel. J. Nonlinear Sci. Appl. 2018, 11, 1004–1014. [Google Scholar] [CrossRef] [Green Version]
- Jarad, F.; Abdeljawad, T.; Hammouch, Z. On a class of ordinary differential equations in the frame of Atangana-Baleanu fractional derivative. Chaos Solit. Fract. 2018, 117, 16–20. [Google Scholar] [CrossRef]
- Diaz, J.; Margolis, B. Fixed point theorem of the alternative, for contractions on a generalized complete metric space. Bull. Am. Math. Soc. 1968, 74, 305–309. [Google Scholar] [CrossRef] [Green Version]
- Jung, S. A fixed point approach to the stability of differential equations y′ = F(x, y). Bull. Malays. Math. Sci. Soc. 2010, 33, 47–56. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K. Stability of a Nonlinear ML-Nonsingular Kernel Fractional Langevin System with Distributed Lags and Integral Control. Axioms 2022, 11, 350. https://doi.org/10.3390/axioms11070350
Zhao K. Stability of a Nonlinear ML-Nonsingular Kernel Fractional Langevin System with Distributed Lags and Integral Control. Axioms. 2022; 11(7):350. https://doi.org/10.3390/axioms11070350
Chicago/Turabian StyleZhao, Kaihong. 2022. "Stability of a Nonlinear ML-Nonsingular Kernel Fractional Langevin System with Distributed Lags and Integral Control" Axioms 11, no. 7: 350. https://doi.org/10.3390/axioms11070350