
The Development History and Latest Progress of Deep-Sea Polymetallic Nodule Mining Technology

Abstract
:1. Introduction
2. The Development History of Deep-Sea Polymetallic Nodule Mining Technology
2.1. Pilot Tests by the International Consortia in the 1970s
2.2. Research by Pioneer Investors after the 1980s
2.2.1. Studies on the Scale of the Commercial Exploitation of Deep-Sea Polymetallic Nodules
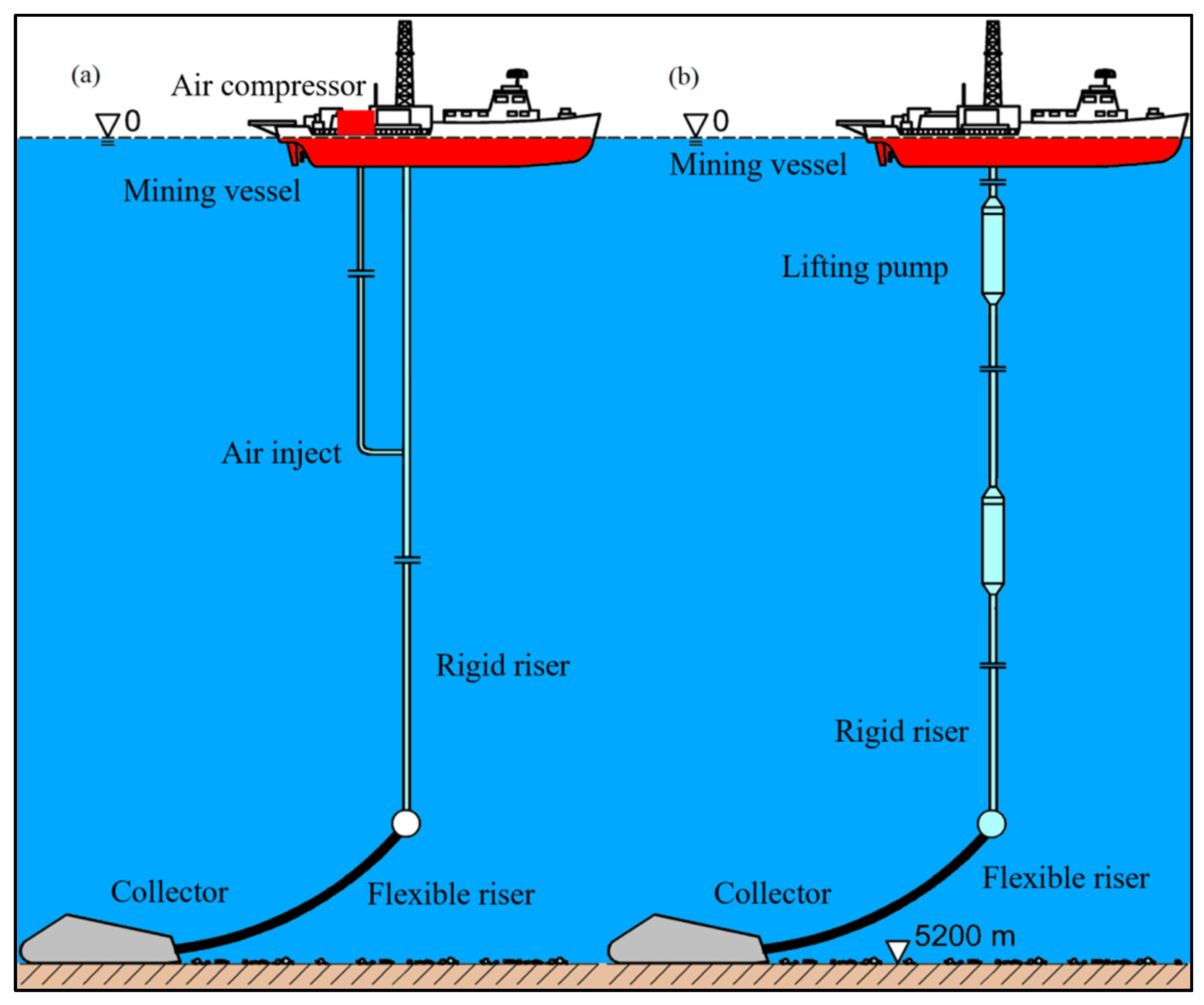
2.2.2. Research into Nodule Vertical Pipeline Lifting Technology
2.2.3. Research into Nodule Harvesting Technology on the Seabed
2.2.4. Research into Traveling Methods of Nodule Collectors on the Seafloor
2.2.5. Shallow-Sea Trials of Key Sub-Systems
2.2.6. Proposal for a Deep-Sea Polymetallic Nodule Commercial Mining System
2.3. Research by EU Businesses and Institutions in the 2010s
3. Recent Progress in the Development of Deep-Sea Nodule Mining Technology
3.1. GSR’s Collector Test and Environmental Impact Assessment Study
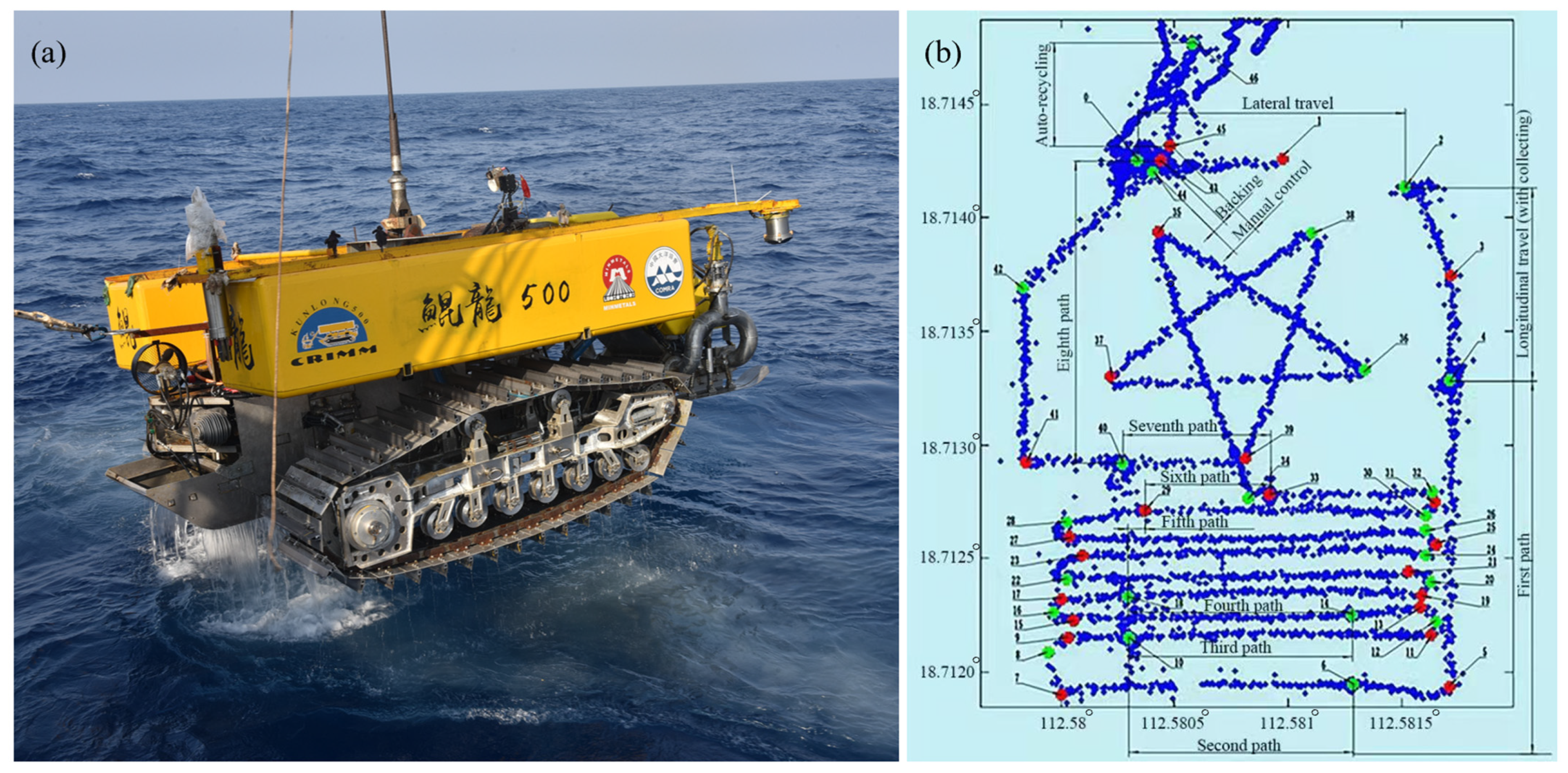
3.2. Progress of the Deep-Sea Polymetallic Nodules Mining Test Project in COMRA
4. The Outlook of Deep-Sea Polymetallic Nodule Mining Technology
4.1. Facing the Development Opportunities
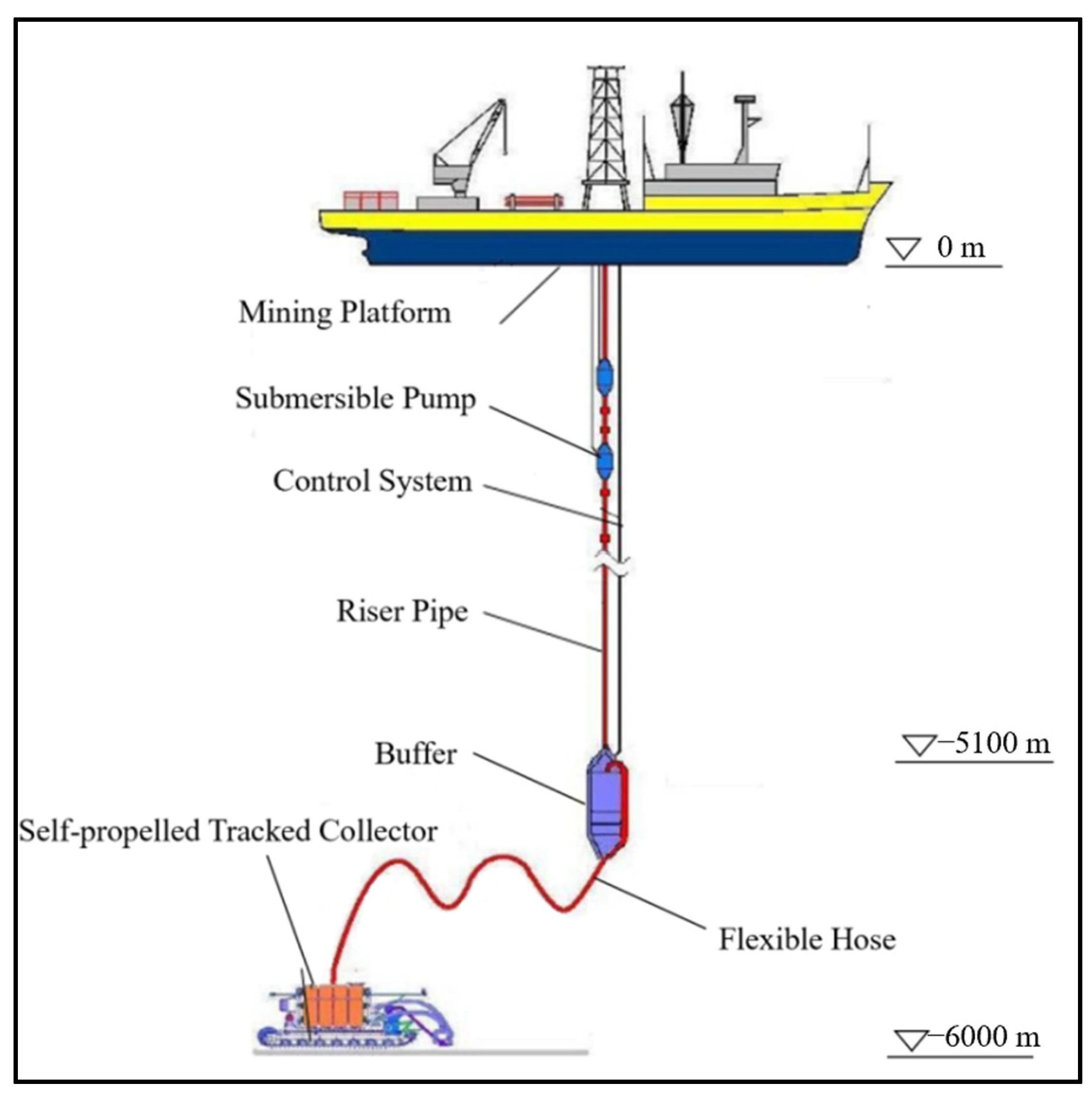
4.2. Recent Mainstream Technology Scheme
4.3. A Low Environmental Disturbance
4.4. Mutual Promotion of Deep-Sea Equipment and Material Development
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- United Nations Office of Legal Affairs; International Seabed Authority. Marine Mineral Resources: Scientific Advances and Economic Perspectives; United Nations: New York, NY, USA, 2004; pp. 58–62. [Google Scholar]
- International Seabed Authority. Polymetallic Nodules. Brochures. Available online: https://isa.org.jm/files/files/documents/eng7.pdf (accessed on 23 September 2021).
- Masuda, Y.; Cruickshank, M.J.; Mero, J.L. Continuous bucket-line dredging at 12,000 feet. In Proceedings of the Offshore Technology Conference, Dallas, TX, USA, 18–20 April 1971; pp. 837–841. [Google Scholar]
- Yang, J.M.; Liu, L.; Lv, H.N.; Lin, Z.Q. Deep-Sea Mining Equipment in China: Current status and prospect. Strateg. Study CAE 2020, 22, 1–9. [Google Scholar]
- Brocktt, F.H.; Huizingh, J.P.; Mcfarlane, J.A.R. Updated analysis of the capital and operating costs of a polymetallic nodule deep ocean mining system developed in the 1970s. In Proceedings of the ISA Workshop on Polymetallic Nodule Mining Technology—Current Status and Challenges Ahead, Chennai, India; 2008; pp. 54–80. [Google Scholar]
- Kaufman, R.; Latimer, J.P.; Tolefson, D.C.; Senni, S. The design and operation of a pacific ocean deep-ocean mining test ship: R/V Deepsea Miner II. In Proceedings of the Offshore Technology Conference, Houston, TX, USA; 1985; pp. 33–43. [Google Scholar]
- Chung, J.S. Coupled ship and pipe motions measured in north pacific ocean: The hughes glomar explorer with a 5,000-m-long heavy-lift pipe deployed. Int. J. Offshore Polar Eng. 2010, 20, 1–6. [Google Scholar]
- Chung, J.S. Deep-ocean mining technology developments III. In Proceedings of the Eighth (2009) ISOPE Ocean Mining Symposium, Chennai, India; 2009; pp. 1–7. [Google Scholar]
- United Nations. United Nations Convention on the Law of the Sea (A/CONF.62/122); United Nations: New York, NY, USA, 1982. [Google Scholar]
- United Nations. Agreement for the Implementation of Part XI of the United Nations Convention on the Law of the Sea of 10 December 1982 (A/RES/48/263); United Nations: New York, NY, USA, 1994. [Google Scholar]
- UN Ocean Economics Technology Branch. Delineation of Mine Sites and Potential in Different Sea Areas; Springer: Berlin/Heidelberg, Germany, 1987; pp. 27–28. [Google Scholar]
- International Seabed Authority. Regulations on Prospecting and Exploration for Polymetallic Nodules in the Area (ISBA/19/C/17); International Seabed Authority: Kingston, Jamaica, 2013. [Google Scholar]
- Xu, C.H. Research on Tech-Econo Model of Developing Ocean Polymetallic Nodule Resource. Min. Metall. 2000, 9, 59–64. Available online: http://ky.bgrimm.cn/ysjsky/ch/reader/view_abstract.aspx?file_no=20000116&flag=1 (accessed on 13 October 2021).
- International Seabed Authority. Report on the International Seabed Authority’s Workshop on Polymetallic Nodule Mining Technology: Current Status and Challenges Ahead (ISBA/14/LTC/3); International Seabed Authority: Kingston, Jamaica, 2008. [Google Scholar]
- Kirchain, R.; Field, F.R.; Roth, R. Financial Regimes for Polymetallic Nodule Mining: A Comparison of Four Economic Models; Working Group Meeting: Kingston, Jamaica, 2019; Available online: https://isa.org.jm/files/files/documents/model_comparisons_0.pdf (accessed on 14 September 2021).
- Nijen, K.V.; Passel, S.V.; Squires, D. A stochastic techno-economic assessment of seabed mining of polymetallic nodules in the clairon clipperton fracture zone. Mar. Policy 2018, 95, 133–141. [Google Scholar] [CrossRef]
- Doyle, R.L.; Halkyard, J.E. Large scale airlift experiments for application to deep ocean mining. In Proceedings of the ASME 2010 29th International Conference on Offshore Mechanics & Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; OMAE2007-29641. pp. 27–36. Available online: https://asmedigitalcollection.asme.org/OMAE/proceedings-abstract/OMAE2007/42711/27/318787 (accessed on 23 September 2021).
- Xiao, Y.X.; Yang, L.B.; Cao, L.; Wang, Z.W. Distribution of marine mineral resource and advances of deep-sea lifting pump technology. J. Drain. Irrig. Mach. Eng. 2014, 32, 319–326. [Google Scholar]
- Sadatomi, M.; Sato, Y.; Yoshinaga, T.; Inagaki, K. Hydraulic lifting of coarse particles in vertical pipes (1st Report, Liquid-Solid Two-Phase Flow). Jpn. J. Multiph. Flow 1990, 4, 111–124. [Google Scholar] [CrossRef] [Green Version]
- Yoshizawa, Y.; Kawashima, T.; Noda, K. Hydraulic transport of solid material (1nd report). J. Min. Metall. Inst. Jpn. 1986, 80, 1047–1053. [Google Scholar]
- Zou, W.S.; Li, Z.H.; Chen, A.L. Lifting motor pump in deep sea mining. J. Cent. South Univ. (Sci. Technol.) 2011, 42, 221–225. [Google Scholar]
- Zou, W.S.; Lu, Y.; Li, Z.H. Numerical simulation and analyses of lift pump in deep sea mining. J. Hunan Univ. (Nat. Sci.) 2013, 40, 59–63. [Google Scholar]
- Liu, S.J.; Liu, C.; Dai, Y. Current status and progress of deep-sea mining equipment research and development. J. Mech. Eng. 2014, 50, 8–18. [Google Scholar] [CrossRef]
- Yoon, C.H.; Park, Y.C.; Kim, Y.J. A Study on flow analysis of lifting pump and flexible hose for sea-test. J. Korean Soc. Geosystem Eng. 2007, 44, 308–313. [Google Scholar]
- Park, J.M.; Yoon, C.H.; Park, Y.C.; Kim, Y.J.; Lee, D.K.; Kwon, S.K. Three dimensional Solid-Liquid flow analysis for design of two-stage lifting pump. In Proceedings of the 7th ISOPE Ocean Mining Symposium, Lisbon, Portugal, 1–6 July 2007; pp. 171–176. [Google Scholar]
- Yoon, C.H.; Park, Y.C.; Lee, D.K.; Kwon, S.K.; Lee, J.N. Flow analysis of solid-liquid mixture in a lifting pump. In Proceedings of the 6th ISOPE Ocean Mining Symposium, Changsha, China, 9–13 October 2005; pp. 101–105. [Google Scholar]
- Kotlinski, R.; Stoyanova, V.; Avramov, A. An overview of the interoceanmetal deep-sea technology development (mining and processing) programme. In Proceedings of the ISA Workshop on Polymetallic Nodule Mining Technology—Current Status and Challenges Ahead, Chennai, India; 2008; pp. 168–184. [Google Scholar]
- Tang, D.S.; Yang, N.; Jin, X.; Gong, D.W.; Chen, G.G. Experimental study of lifting simulation system for deep sea mining. J. Cent. South Univ. (Sci. Technol.) 2011, 42, 214–220. [Google Scholar]
- Jian, Q.; Cheng, X.Z. A Review and prospects of exploitation deep seabed multmetallic nodules. China Min. Mag. 1996, 5, 14–18. [Google Scholar]
- Yang, N. Research and development of polymetallic nodule mining technology in China. In Proceedings of the ISA Workshop on Polymetallic Nodule Mining Technology—Current Status and Challenges Ahead, Chennai, India; 2008; pp. 214–226. [Google Scholar]
- Deepak, C.R.; Shajahan, M.; Atmanand, M.A.; Annamalai, K.; Jeyamani, R.; Ravindran, M.; Schulte, E.; Handschuh, R.; Panthel, J.; Grebe, H.; et al. Developmental tests on the underwater mining system using flexible riser concept. In Proceedings of the 4th ISOPE Ocean Mining Symposium, Szczecin, Poland, 23–27 September 2001; pp. 94–98. [Google Scholar]
- Hong, S.; Choi, J.S.; Shim, J.Y. A kinematic and sensitivity analysis of pickup device of deep-sea manganese nodule collector. In Proceedings of the 2nd ISOPE Ocean Mining Symposium, Seoul, Korea, 24–26 November 1997; pp. 100–104. [Google Scholar]
- Hong, S.; Choi, J.S.; Kim, J.H.; Yang, C.K. Experimental study on hydraulic performance of hybrid pick-up device of manganese nodule collector. In Proceedings of the 3rd ISOPE Ocean Mining Symposium, Goa, India, 8–19 November 1999; pp. 69–77. [Google Scholar]
- Kim, S.; Cho, S.G.; Lee, M.; Kim, J.; Lee, T.; Park, S.; Hong, S.; Kim, H.W.; Min, C.H.; Choi, J.S.; et al. Reliability-based design optimization of a pick-up device of a manganese nodule pilot mining robot using the Coanda effect. J. Mech. Sci. Technol. 2019, 33, 3665–3672. [Google Scholar] [CrossRef]
- Welling, C.G. An advanced design deep sea mining system. In Proceedings of the 13th Offshore Technology Conference, 4–7 May 1981; OTC 4094. pp. 247–257. [Google Scholar]
- Dai, Y.; Liu, S.J. Researches on deep ocean mining robots: Status and development. ROBOT 2013, 35, 363–375. [Google Scholar] [CrossRef]
- Yoon, S.; Hong, S.; Park, S.J.; Choi, J.S.; Kim, H.W.; Yeu, T.K. Track velocity control of crawler type underwater mining robot through shallow-water test. J. Mech. Sci. Technol. 2012, 26, 3291–3298. [Google Scholar] [CrossRef]
- Hong, S.; Kimg, H.W.; Choi, J.S. A self-propelled deep-seabed miner and lessons from shallow water tests. In Proceedings of the ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 1–12. [Google Scholar]
- Cho, S.G.; Park, S.Y.; Oh, J.; Min, C.; Kim, H.; Hong, S.; Jang, J.; Lee, T.H. Design optimization of deep-seabed pilot miner system with coupled relations between constraints. J. Terramech. 2019, 83, 25–34. [Google Scholar] [CrossRef]
- Janarthanan, C.; Chandran, V.; Sundaramoorthi, V.; Viswanath, B.O.; Dinesh, K.D.; Muthuvel, P.; Rajesh, S.; Gnanaraj, A.A.; Venkatesan, K.; Muthukrishna, B.S.; et al. Development and testing of locomotion trials on soft sea bed soil and system performance checks of experimental undercarriage system. In Proceedings of the Twenty-eighth (2018) International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018; pp. 152–159. [Google Scholar]
- Dai, Y.; Zhang, J.; Zhang, T.; Liu, S.J. Motion simulation of the deep ocean mining system based on its integrated multi-body dynamic model. J. Mech. Eng. 2017, 53, 155–160. [Google Scholar] [CrossRef]
- Han, Q.J.; Liu, S.J. A new path tracking control algorithm of deep sea tracked miner. In Proceedings of the 10th ISOPE Ocean Mining Symposium, Szczecin, Poland, 22−26 September 2013; pp. 273–278. [Google Scholar]
- Han, Q.J.; Liu, S.J.; Dai, Y.; Hu, X. Dynamic analysis and path tracking control of tracked underwater miner in working condition. In Proceedings of the 9th ISOPE Ocean Mining Symposium, Maui, HI, USA, 19–24 June 2011; pp. 92–96. [Google Scholar]
- Peng, J.P. Development of research on deep-sea polymetallic nodule mining vehicle in China. Min. Process. Equip. 2020, 48, 8–11. [Google Scholar]
- Chen, B.Z. Development and experimental study of crawler mechanism of “Kunlong 500” mining vehicle. Min. Technol. 2019, 19, 125–128. [Google Scholar]
- Yamada, H.; Yamazaki, T. Japan’s Ocean test of the nodule mining system. In Proceedings of the 8th International Offshore and Polar Engineering Conference, Montreal, QC, Canada; 1998; pp. 13–19. [Google Scholar]
- Deepak, C.R.; Ramji, S.; Ramesh, N.R.; Babu, S.M.; Abraham, R.; Shajahan, M.A.; Atmanand, M.A. Development and testing of underwater mining systems for long term operations using flexible riser concept. In Proceedings of the 7th ISOPE Ocean Mining Symposium, Lisbon, Portugal, 1–6 July 2007; pp. 166–170. [Google Scholar]
- Rajesh, S.; Gnanaraj, A.A.; Velmurugan, A.; Ramesh, R.; Muthuvel, P.; Babu, M.K.; Ramesh, N.R.; Deepak, C.R.; Atmanand, M.A. Qualification tests on underwater mining system with manganese nodule collection and crushing devices. In Proceedings of the 9th ISOPE Ocean Mining Symposium, Maui, HI, USA, 19–24 June 2011; pp. 110–115. [Google Scholar]
- Hong, S.; Kim, H.W.; Yeu, T.; Choi, J.S.; Lee, T.H.; Lee, J.K. Technologies for safe and sustainable mining of deep-seabed minerals. In Environmental Issues of Deep-Sea Mining: Impacts, Consequences and Policy Perspectives; Sharma, R., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 95–143. [Google Scholar]
- Liu, S.J.; Yang, N.; Han, Q.J. Research and development of deep sea mining technology in China. In Proceedings of the ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering OMAE, Shanghai, China, 6–11 June 2010; pp. 163–169. [Google Scholar]
- Yamazaki, T. Economic validation analyses of Japan’s proposed nodule, crust, and kuroko-type SMS mining in 2006. In Proceedings of the IEEE Xplore, Vancouver, BC, Canada, 29 September–4 October 2007. [Google Scholar] [CrossRef]
- Yubko, V.; Kostyuk, A.; Ponomareva, I. The concept of engineering and technological support for mining and processing polymetallic nodules from the Russian exploration area. In Proceedings of the ISA Workshop on Polymetallic Nodule Mining Technology—Current Status and Challenges Ahead, Chennai, India; 2008; pp. 227–244. [Google Scholar]
- Atmanand, M.A.; Kathiroli, S. The status of India’s mining programme. In Proceedings of the ISA Workshop on Polymetallic Nodule Mining Technology—Current Status and Challenges Ahead, Chennai, India; 2008; pp. 130–142. [Google Scholar]
- Herrouin, G. The Exploitation of Nodules Polymétalliques: Fantasy or Reality? Published in La Chimie et la mer, 2009. pp. 81–98. Available online: http://www.mediachimie.org/ressource/lexploitation-des-nodules-polym%C3%A9talliques-utopie-ou-r%C3%A9alit%C3%A9 (accessed on 23 September 2021).
- International Seabed Authority. Status of Contracts for Exploration and Related Matters, Including Information on the Periodic Review of the Implementation of Approved Plans of Work for Exploration (ISBA/26/C/4); International Seabed Authority: Kingston, Jamaica, 2020. [Google Scholar]
- Rozemeijer, M.J.C.; Burg, S.W.K.; Jak, R.; Lallier, L.E.; Craenenbroeck, K.V. Seabed mining. In Building Industries at Sea “Blue Growth” and the New Maritime Economy; Kate, J., Gordon, D., Ian, M., Eds.; River Publishers: Delft, The Netherlands, 2018; pp. 73–85. Available online: https://www.riverpublishers.com/pdf/ebook/RP9788793609259.pdf (accessed on 21 September 2021).
- Jort, M.; Van, W. Blue Mining-Breakthrough Solutions for Minerals Extraction and Processing in Extreme Environments, 2014–2018; Public Report: Delft, The Netherlands, 2018; pp. 7–25. [Google Scholar]
- Blue Nodules. Available online: https://blue-nodules.eu/ (accessed on 20 September 2021).
- International Seabed Authority. Development of Environmentally Responsible Mining Technologies: Towards an Approval Process for Mining Equipment (ISBA/23/C/5); International Seabed Authority: Kingston, Jamaica, 2017. [Google Scholar]
- American Bureau of Shipping. ABS Guide for Subsea Mining; American Bureau of Shipping: Houston, TX, USA, 2020. [Google Scholar]
- Chu, J. What will Happen to Sediment Plumes Associated with Deep-Sea Mining; MIT News: Cambridge, MA, USA, 2021. [Google Scholar]
- Köller, F. Mitigating Turbidity Impact Deep Sea Nodule Harvesting; Delft University: Delft, The Netherlands, 2016. [Google Scholar]
- T Müller, M.H.W.J. Planning and construction of a large scale test facility for flow analysis of vertical transport of water and coarse material as part of the European research project “Blue Mining”. In Proceedings of the SME Annual Conference & Expo, Minneapolis, MN, USA; 2018. [Google Scholar]
- Volkmann, S.E. Blue Mining-Planning the Mining of Seafloor Manganese Nodules. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2018. [Google Scholar] [CrossRef]
- International Seabed Authority. Review of Environmental Impact Assessments for the Testing of Collector Components in the Exploration Area (ISBA/25/LTC/4); International Seabed Authority: Kingston, Jamaica, 2019. [Google Scholar]
- Federal Institute for Geosciences and Natural Resources; International Seabed Authority. Environmental Impact Statement: Small-Scale Testing of Nodule Collector Components on the Seafloor of the Clarion-Clipperton Fracture Zone and Its Environmental Impact; Global Sea Mineral Resources NV: Oostende, Belgium, 2018. [Google Scholar]
- Global Sea Mineral Resources NV. PATANIA II—Technical Update. 2019. Available online: https://deme-gsr.com/news/patania-ii-technical-update/ (accessed on 14 September 2021).
- Global Sea Mineral Resources NV. Deep-Seabed Mining Robot PATANIA II Successfully Reconnected-Mission Continues. 2021. Available online: https://deme-gsr.com/news/deep-seabed-mining-robot-patania-ii-successfully-reconnected-mission-continues/ (accessed on 14 September 2021).
- Global Sea Mineral Resources NV. GSR Concludes Successful Trial of Deep Ocean Technology. 2021. Available online: https://deme-gsr.com/news/gsr-concludes-successful-trial-of-deep-ocean-technology/ (accessed on 25 September 2021).
- Kang, Y.J.; Liu, S.; Zhao, H.; Hu, X.; Zou, W.S. Design and analysis of an innovative deep-sea lifting motor pump. Appl. Ocean. Res. 2019, 82, 22–31. [Google Scholar] [CrossRef]
- Liu, S.J.; Li, Y.; Hu, X. Effect of particle volume fraction on the performance of deep-sea mining electric lifting pump based on DEM-CFD. J. Mech. Eng. 2020, 56, 257–264. [Google Scholar]
- Cao, Y.; Du, X.G.; Song, H.F.; Lin, Q.; Yang, B. Overall strength analysis and assessment of underwater buffer station in deep sea mining. Ship Ocean. Eng. 2020, 49, 136–139. [Google Scholar]
- Deng, L.W.; Hu, Q.; Chen, J.; Kang, Y.J.; Liu, S.J. Particle distribution and motion in six-stage centrifugal pump by means of slurry experiment and CFD-DEM simulation. J. Mar. Sci. Eng. 2021, 9, 716. [Google Scholar] [CrossRef]
- Hu, Q.; Chen, J.; Deng, L.W.; Kang, Y.J.; Liu, S.J. CFD-DEM simulation of backflow blockage of deep-sea multistage pump. J. Mar. Sci. Eng. 2021, 9, 987. [Google Scholar] [CrossRef]
- Hund, K.; Porta, D.L.; Fabregas, T.P.; Laing, T.; Drexhage, J. Minerals for Climate Action: The Mineral Intensity of the Clean Energy Transition; The World Bank Group: Washington, DC, USA, 2020; Available online: https://commdev.org/pdf/publications/MineralsforClimateActionTheMineralIntensityoftheCleanEnergyTransition.pdf (accessed on 21 September 2021).
- Bloomberg New Energy Finance. Long-Term Energy Storage Outlook; Bloomberg NEF: New York, NY, USA, 2019; Available online: https://about.bnef.com/blog/energy-storage-investments-boombattery-costs-halve-next-decade/ (accessed on 14 September 2021).
- Metals Company. Revolutionizing the Mineral Supply Chain for Fast Growing EV Demand; Metals Company: Vancouver, BC, Canada, 2021; Available online: https://metals.co/investors/ (accessed on 14 September 2021).
- Presidential Documents, (Executive Order 13840 of 19 June 2018). Ocean Policy to Advance the Economic, Security, and Environmental Interests of the United States; (Federal Register, Vol. 83, No. 121), 22 June 2018. Available online: https://www.govinfo.gov/content/pkg/FR-2018-06-22/pdf/2018-13640.pdf (accessed on 20 September 2021).
- Cabinet Decision. The Basic Plan on Ocean Policy. 2018, pp. 55–73. Available online: https://www8.cao.go.jp/ocean/english/plan/pdf/plan03_e.pdf (accessed on 15 September 2021).
- Outline of the 14th Five-Year Plan for National Economic and Social Development and the Long-Range Objectives through the Year 2035 for the People’s Republic of China; 14 March 2021; pp. 79–81. Available online: https://www.ndrc.gov.cn/fggz/fzzlgh/gjfzgh/202103/P020210323405614585384.pdf (accessed on 26 September 2021).
- Nautilus Minerals Singapore PTE LTD. Seafloor Haulage System. International Application Published under the Patent Cooperation Treaty (PCT), Wo 2015/178853. A1. 26 November 2015Michael, C. Marine mining: An area of critical national need. Min. Eng. 2011, 5, 89–93. Available online: https://worldwide.espacenet.com/patent/search/family/054554394/publication/WO2015178853A1?q=2014901855 (accessed on 19 September 2021).
- Alicia, C. Deep Seabed Mining: An Urgent Wake-Up Call to Protect Our Oceans; Greenpeace International: Amsterdam, The Netherlands, 2013. [Google Scholar]
- International Seabed Authority. Draft Standard and Guidelines on the Development and Application of Environmental Management Systems Developed by the Legal and Technical Commission; International Seabed Authority: Kingston, Jamaica, 2020. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Country/Organization | Depth/m | Subject of Testing |
|---|---|---|---|
| 1997 | Japan/TRAM | 2200 | Seabed nodule collection by towed nodule collectors |
| 2001 | India/NOIT | 410 | Nodule collector seabed extraction |
| 2001 | China/COMRA | 135 (lake trial) | Traveling and collection by nodule collectors, lifting pumps |
| 2006 | India/NOIT | 460 | Traveling and collection by nodule collectors, lifting pumps |
| 2009 | South Korea/KIOST | 100 | Nodule collector travel |
| 2010 | South Korea/ KIOST | 100 | Lifting pumps |
| 2013 | South Korea/KIOST | 1370 | Nodule collector travel and artificial nodule collection |
| 2015 | South Korea/KIOST | 1200 | Pump and pipe-based transport system |
| 2016 | China/COMRA | 304 | Pump and pipe-based transport system |
| 2018 | China/COMRA | 514 | Nodule collector travel and artificial nodule collection |
| 2018 | India/NOIT | 890 | Nodule collector travel |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, Y.; Liu, S. The Development History and Latest Progress of Deep-Sea Polymetallic Nodule Mining Technology. Minerals 2021, 11, 1132. https://doi.org/10.3390/min11101132
Kang Y, Liu S. The Development History and Latest Progress of Deep-Sea Polymetallic Nodule Mining Technology. Minerals. 2021; 11(10):1132. https://doi.org/10.3390/min11101132
Chicago/Turabian StyleKang, Yajuan, and Shaojun Liu. 2021. "The Development History and Latest Progress of Deep-Sea Polymetallic Nodule Mining Technology" Minerals 11, no. 10: 1132. https://doi.org/10.3390/min11101132