
Chikungunya Transmission of Mathematical Model Using the Fractional Derivative


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Definition
3. Chikungunya Transmission Mathematical Model
- S represents susceptible hosts;
- E represents exposed hosts;
- I represents symptomatically infectious hosts;
- represents asymptomatically infectious hosts (proportion);.
- R represents recovered hosts;
- represents susceptible mosquitoes;
- represents exposed mosquitoes;
- Z represents infectious mosquitoes;
- represents mosquito-to-human transmission (number of mosquito bites per human per day, allowing for imperfect pathogen transmission);
- represents human-to-mosquito transmission (per day bite rate also allowing for imperfect pathogen transmission);
- shows hosts that develop symptoms;
- represents host latent period (from ‘infected’ to ‘infectious’, days);
- represents mosquito latent period (from ‘infected’ to ‘infectious’, days);
- represents host recovery rate (per day);
- represents host pre-patient period (from ‘infected’ to symptom’s development, days);
- is given by mosquito life span (days).
4. Existence and Uniqueness
- (a)
- The linear growth condition is and .
- (b)
- SoIf , thenwhere . Clearly alsoFurthermore,IfthenThus, ifthenIfthenThus, ifthenFinally, we haveIfthenThe solution for the system is unique if
5. Numerical Methods of the Model
5.1. Numerical Method for Caputo Fractional Derivative
5.2. CF Fractional Derivative
5.3. Numerical Method for Atangana-Baleanu Fractional Derivative
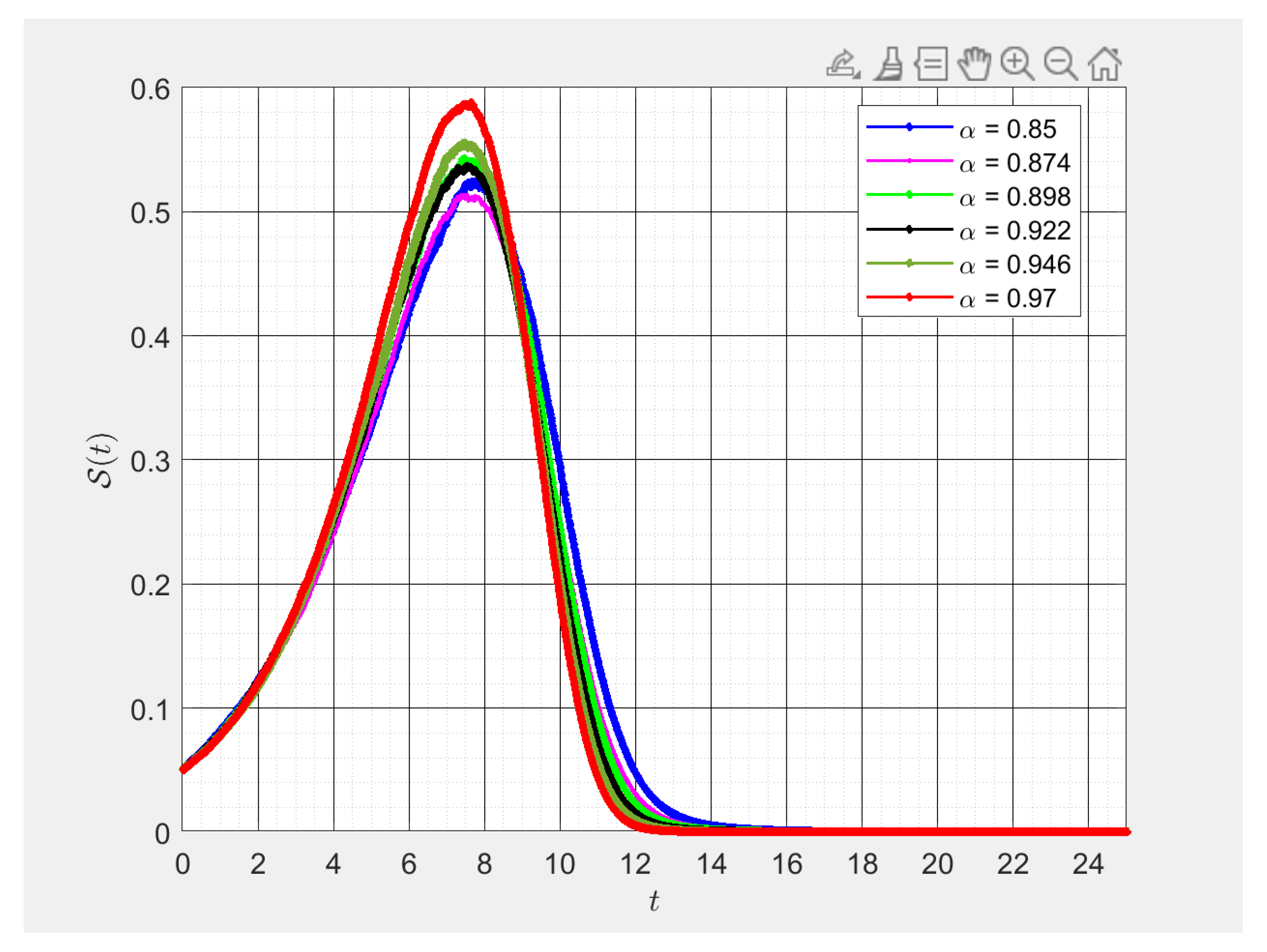
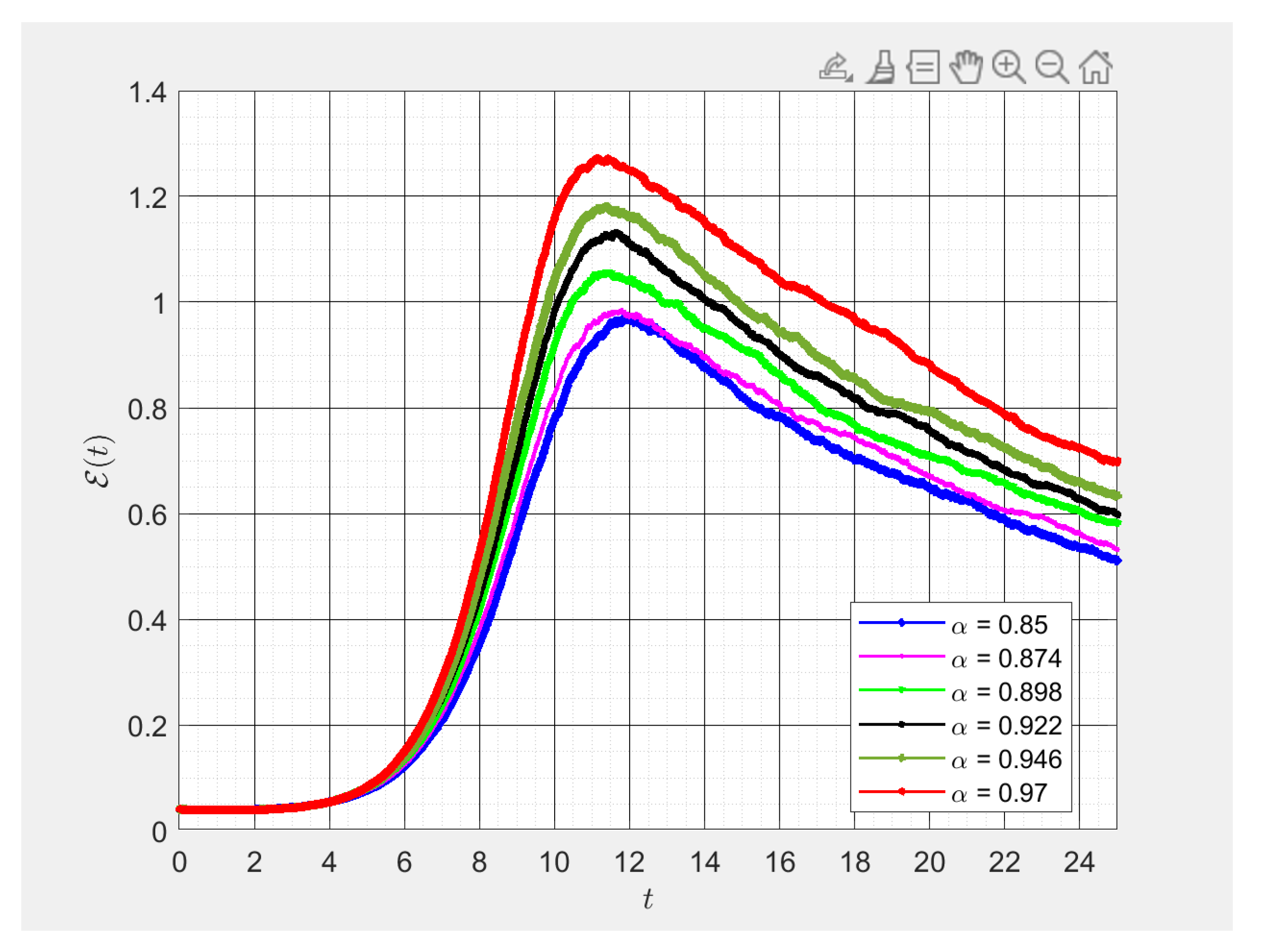
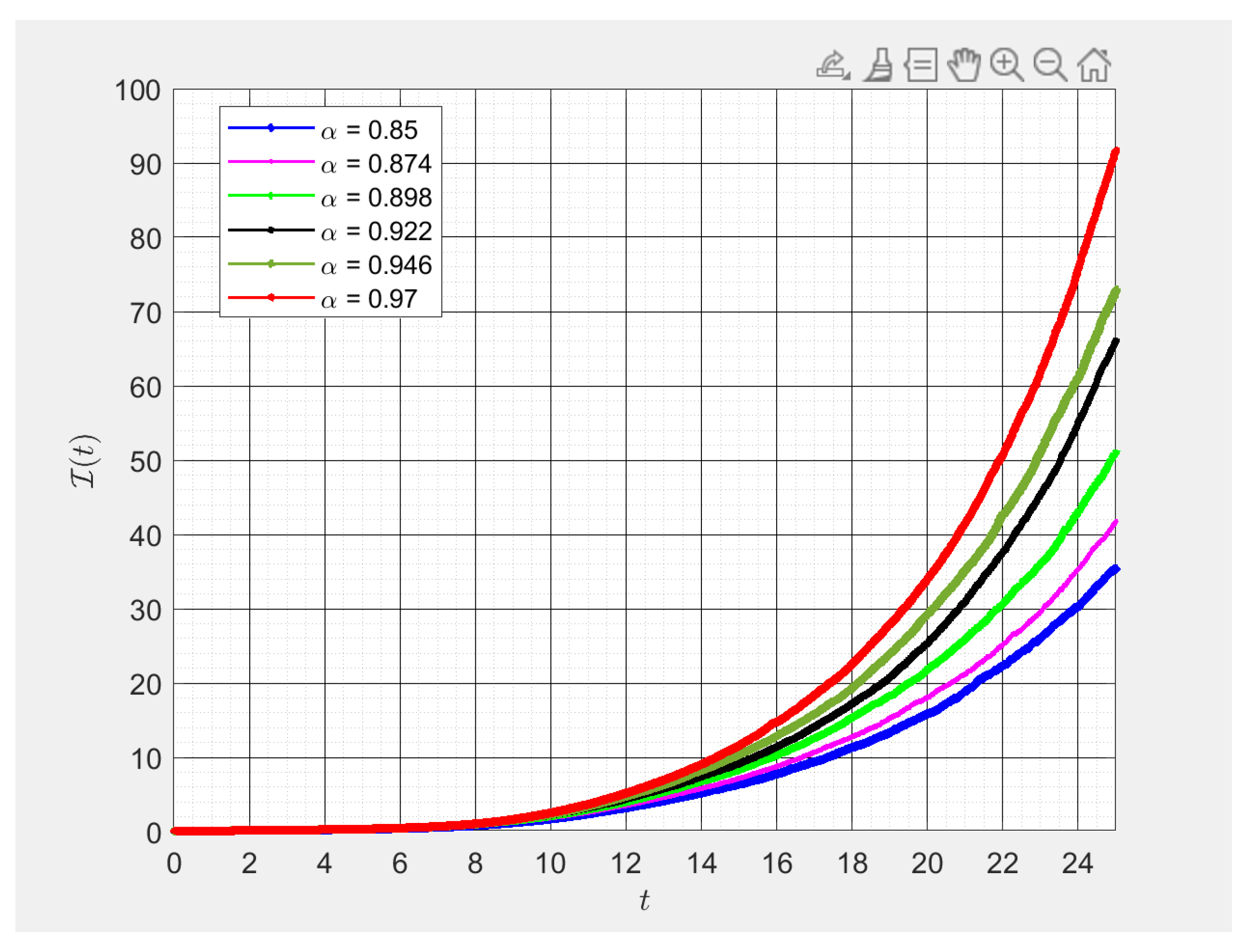
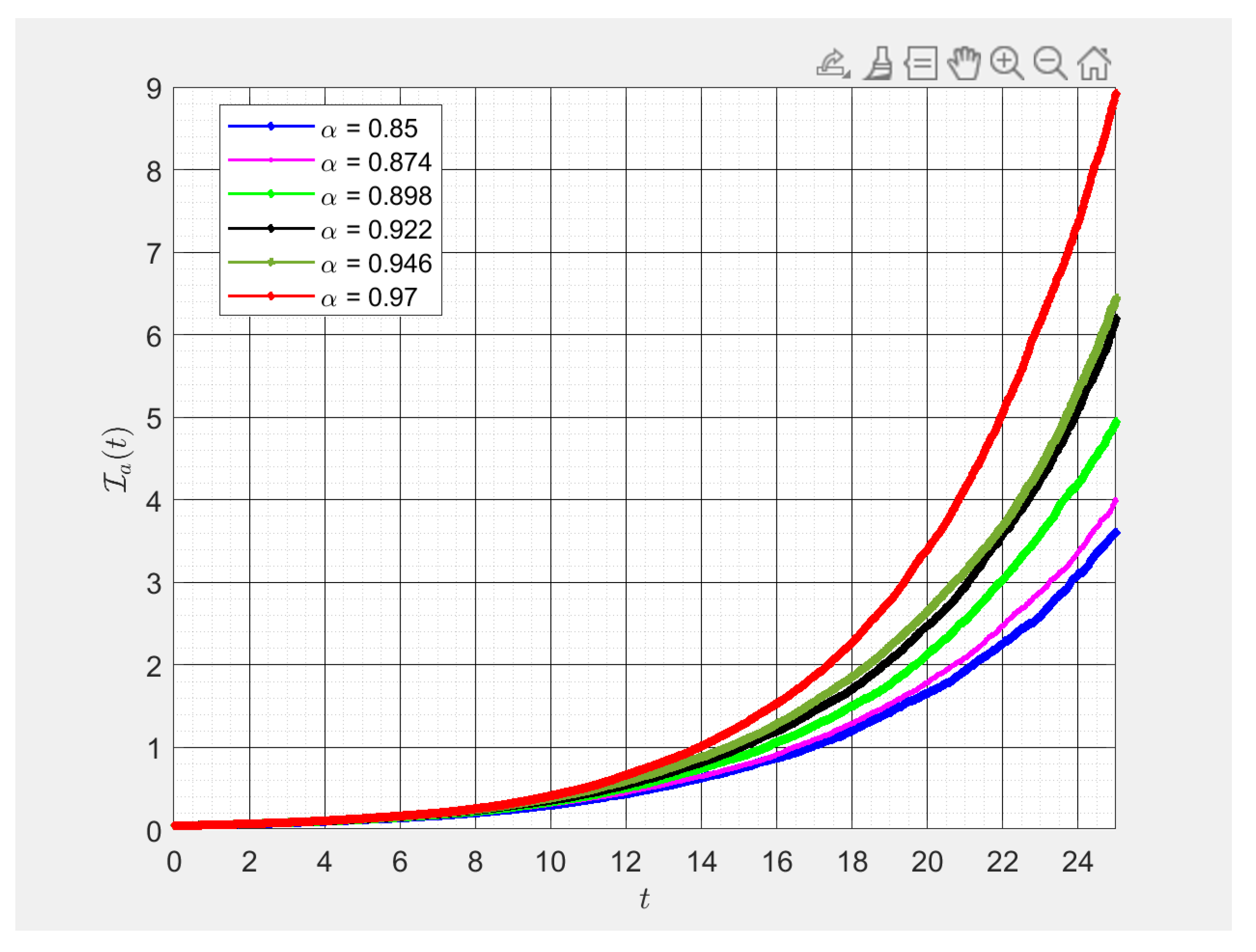
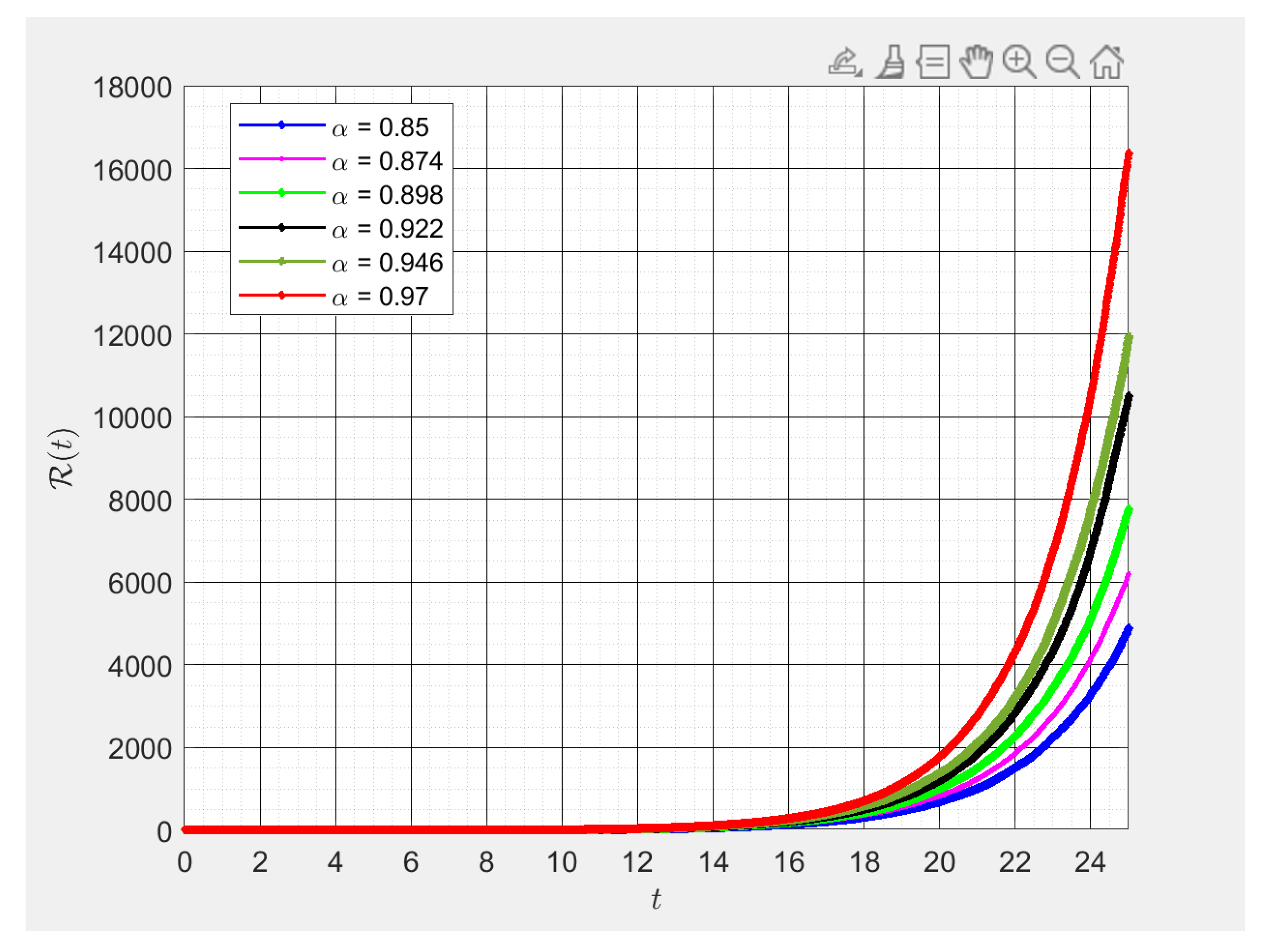
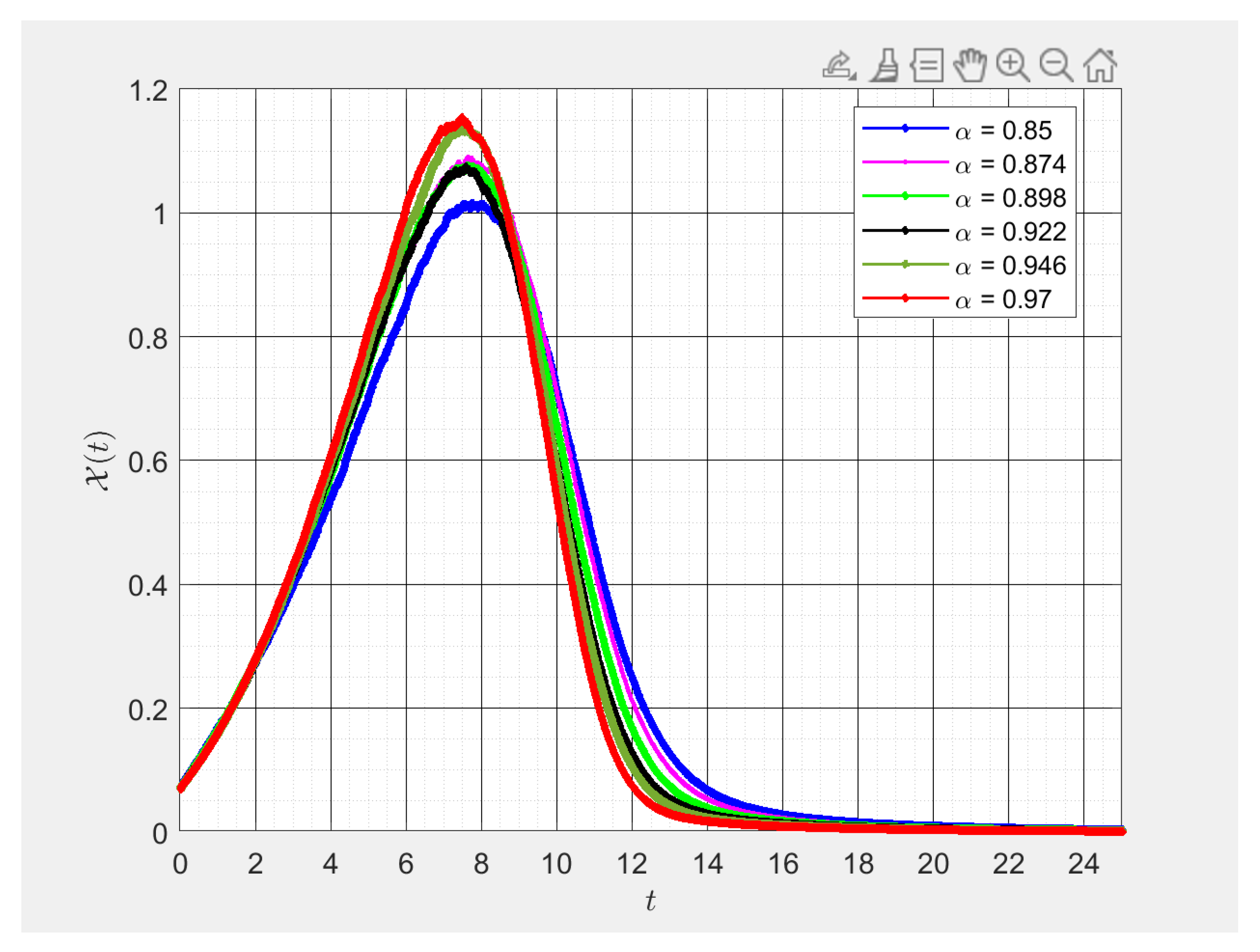
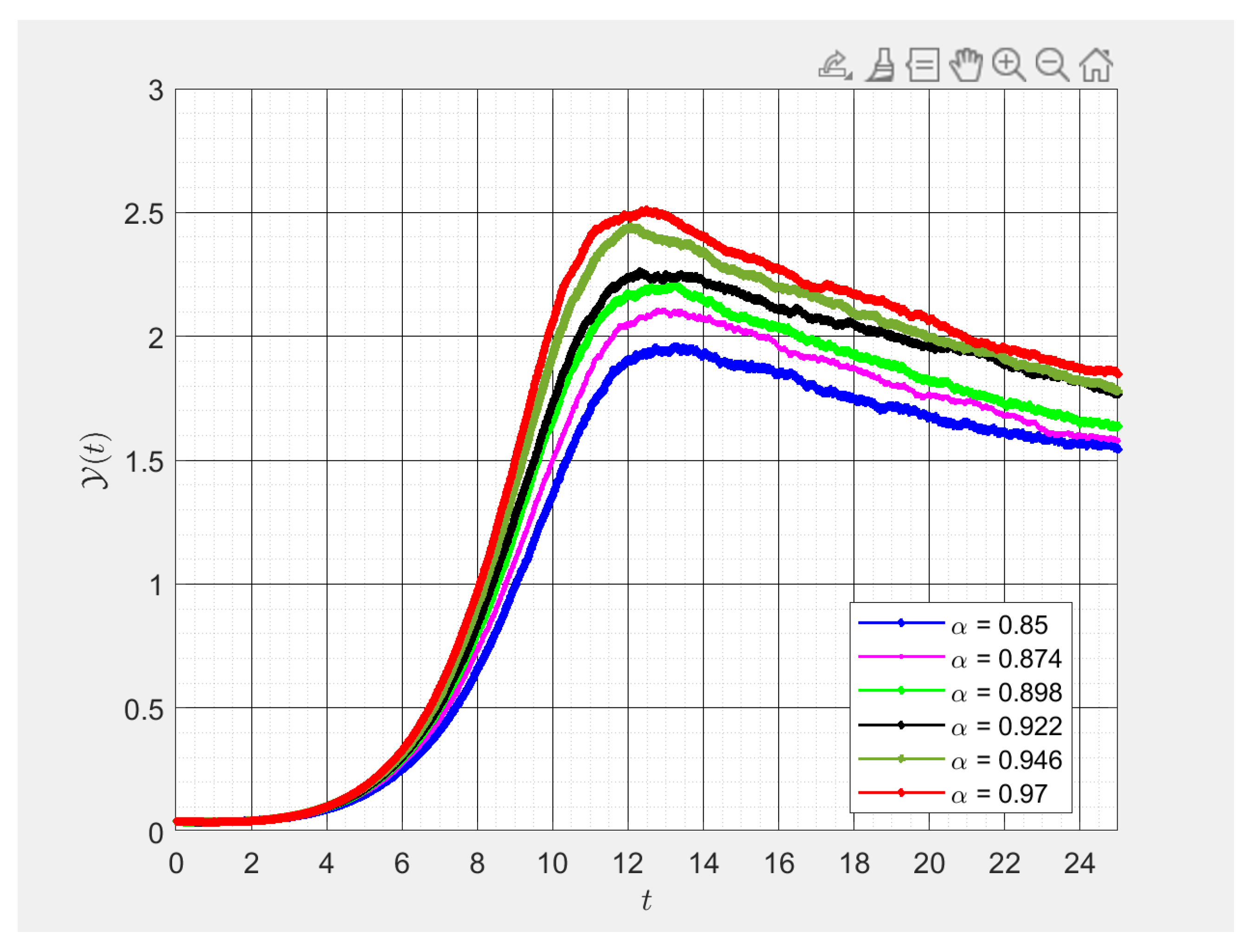
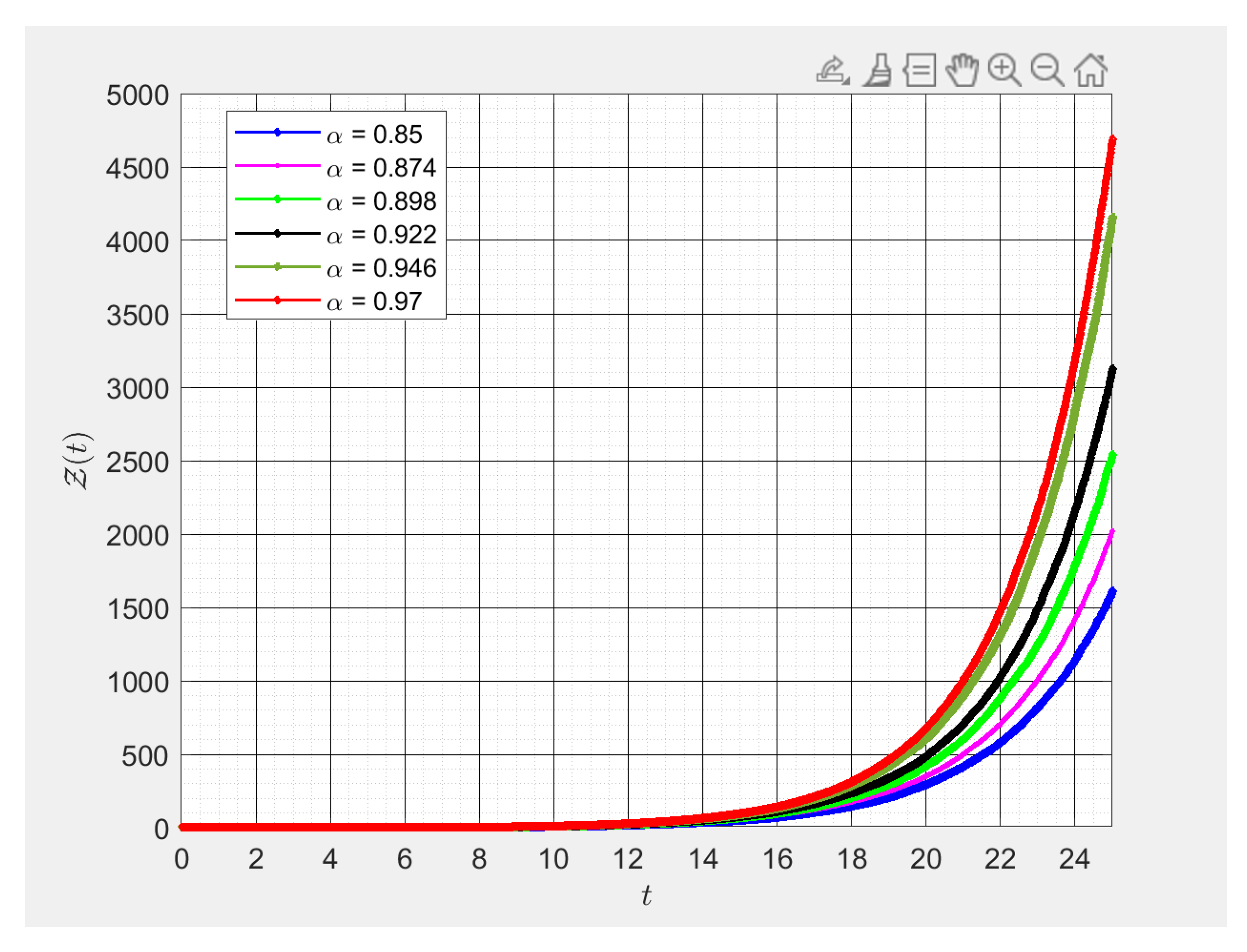
6. Numerical Simulation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Atangana, A.; Jain, S. A new numerical approximation of the fractal ordinary differential equation. Eur. Phys. J. Plus 2018, 133, 37. [Google Scholar] [CrossRef]
- Atangana, A. Fractal-fractional differentiation and integration: Connecting fractal calculus and fractional calculus to predict complex system. Chaos Soliton Fract. 2017, 102, 396–406. [Google Scholar] [CrossRef]
- Atangana, A.; Jain, S. Models of fluid flowing in non-conventional media: New numerical analysis. Discret. Contin. Dyn. Syst. Ser. S 2020, 13, 467. [Google Scholar] [CrossRef]
- Ben Makhlouf, A. A novel finite time stability analysis of nonlinear fractional-order time delay systems: A fixed point approach. Asian J. Control. 2022, 24, 3580–3587. [Google Scholar] [CrossRef]
- Shymanskyi, V.; Sokolovskyy, Y. Finite element calculation of the linear elasticity problem for biomaterials with fractal structure. Open Bioinform. J. 2021, 14, 114–122. [Google Scholar] [CrossRef]
- Lu, J.-G. Chaotic dynamics of the fractional order Ikeda delay system and its synchronization. Chin. Phys. 2006, 15, 301. [Google Scholar]
- Bhalekar, S. Stability and bifurcation analysis of a generalized scalar delay differential equation. Chaos Interdiscip. J. Nonlinear Sci. 2016, 26, 084306. [Google Scholar] [CrossRef]
- Jain, S. Numerical Analysis for the Fractional Diffusion and Fractional Buckmaster’s Equation by Two Step Adam- Bashforth Method. Eur. Phys. J. Plus 2018, 133, 19. [Google Scholar] [CrossRef]
- Abidemi, A.; Owolabi, K.M.; Pindza, E. Modelling the transmission dynamics of Lassa fever with nonlinear incidence rate and vertical transmission. Phys. A Stat. Mech. Appl. 2022, 597, 127259. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Diethelm, K. A fractional calculus based model for the simulation of an outbreak of dengue fever. Nonlinear Dyn. 2013, 71, 613–619. [Google Scholar] [CrossRef]
- Pitolli, F.; Sorgentone, C.; Pellegrino, E. Approximation of the Riesz-Caputo derivative by cubic splines. Algorithms 2022, 15, 69. [Google Scholar] [CrossRef]
- Izadi, M.; Srivastava, H.M. A discretization approach for the nonlinear fractional logistic equation. Entropy 2020, 22, 1328. [Google Scholar] [CrossRef]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives, Theory and Applications, Edited and with a Foreword by S. M. Nikolskiı, Translated from the 1987 Russian Original; Revised by the authors; Gordon and Breach Science Publishers: Yverdon, Switzerland, 1993. [Google Scholar]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Dumitru, B. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. Therma Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Yakob, L.; Clements, A.C. A mathematical model of chikungunya dynamics and control: The major epidemic on Reunion Island. PLoS ONE 2013, 8, e57448. [Google Scholar] [CrossRef] [PubMed]
- Atangana, A.; Araz, S.I. New numerical method for ordinary differential equations: Newton polynomial. J. Comput. Appl. Math. 2020, 372, 112622. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jain, S.; Chalishajar, D.N. Chikungunya Transmission of Mathematical Model Using the Fractional Derivative. Symmetry 2023, 15, 952. https://doi.org/10.3390/sym15040952
Jain S, Chalishajar DN. Chikungunya Transmission of Mathematical Model Using the Fractional Derivative. Symmetry. 2023; 15(4):952. https://doi.org/10.3390/sym15040952
Chicago/Turabian StyleJain, Sonal, and Dimplekumar N. Chalishajar. 2023. "Chikungunya Transmission of Mathematical Model Using the Fractional Derivative" Symmetry 15, no. 4: 952. https://doi.org/10.3390/sym15040952