
Special Functions and Its Application in Solving Two Dimensional Hyperbolic Partial Differential Equation of Telegraph Type

Abstract
:1. Introduction
2. Mathematical Model and Method Description
Fast Fourier Transformation
3. Some Preliminaries and Error Analysis
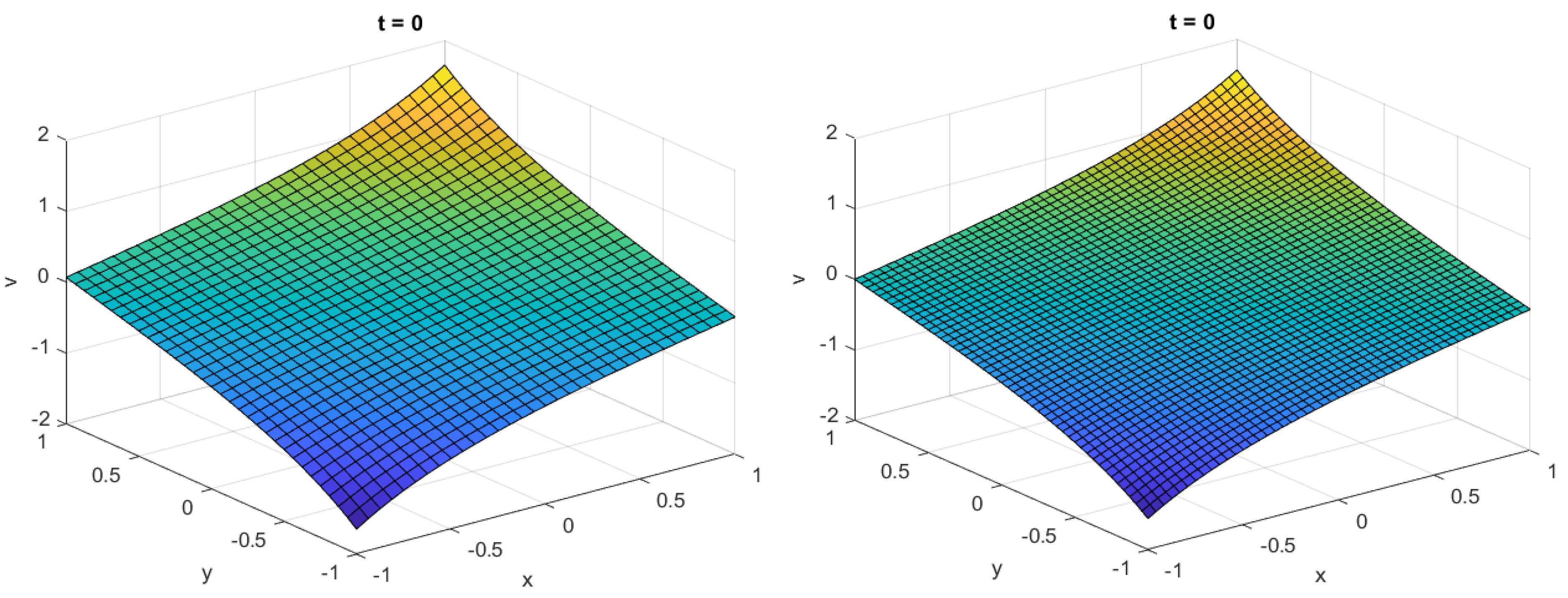
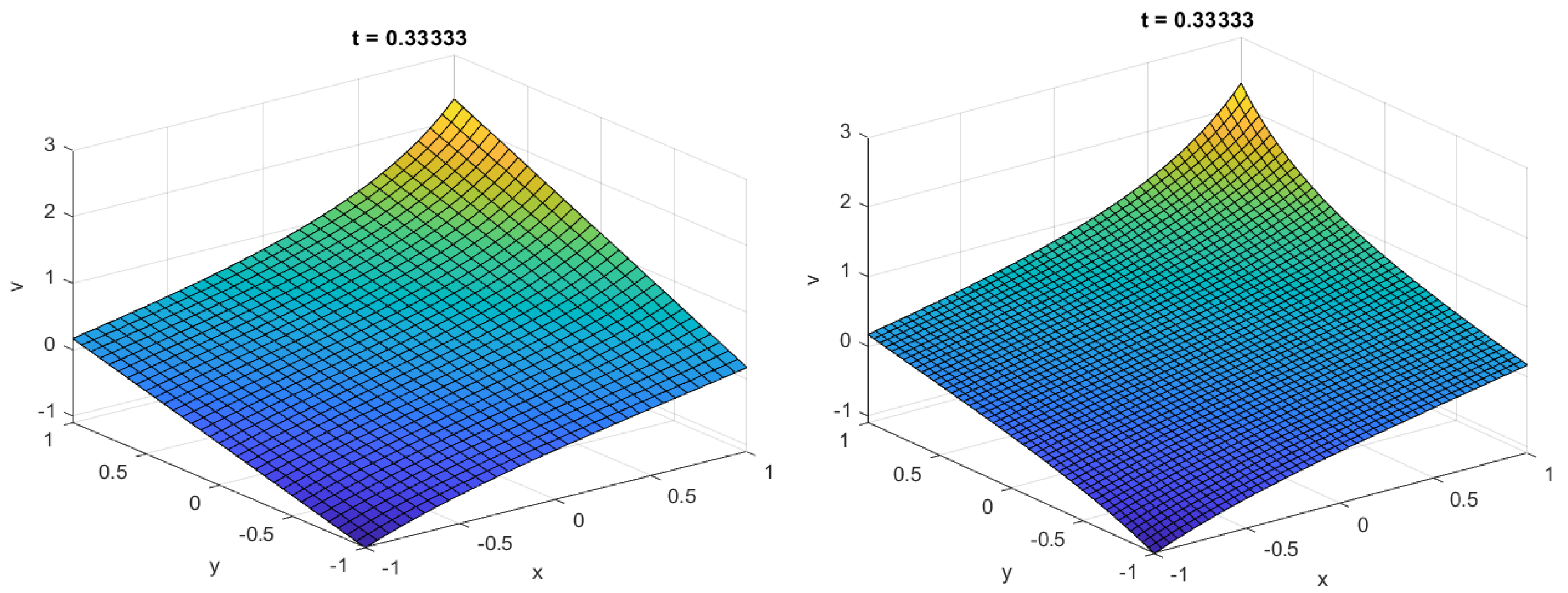
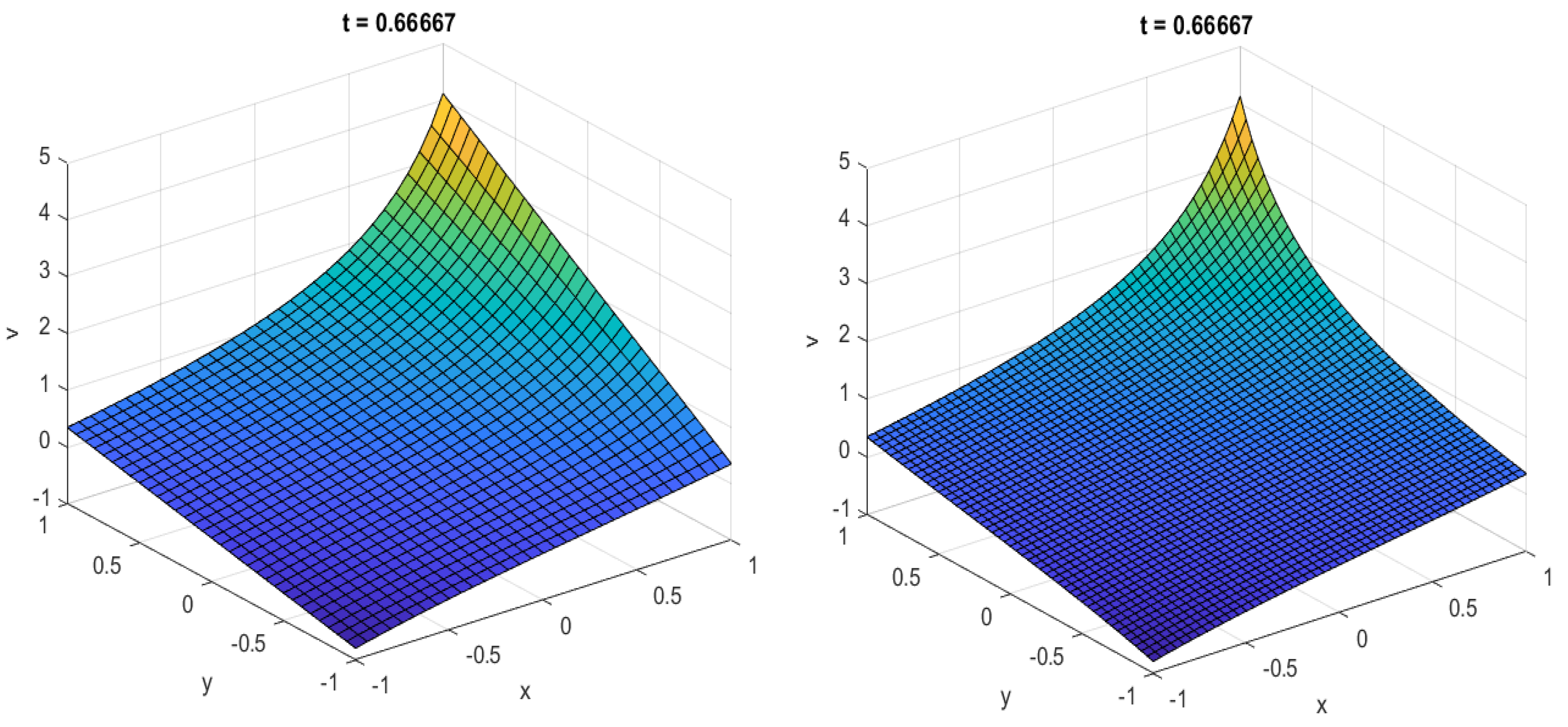
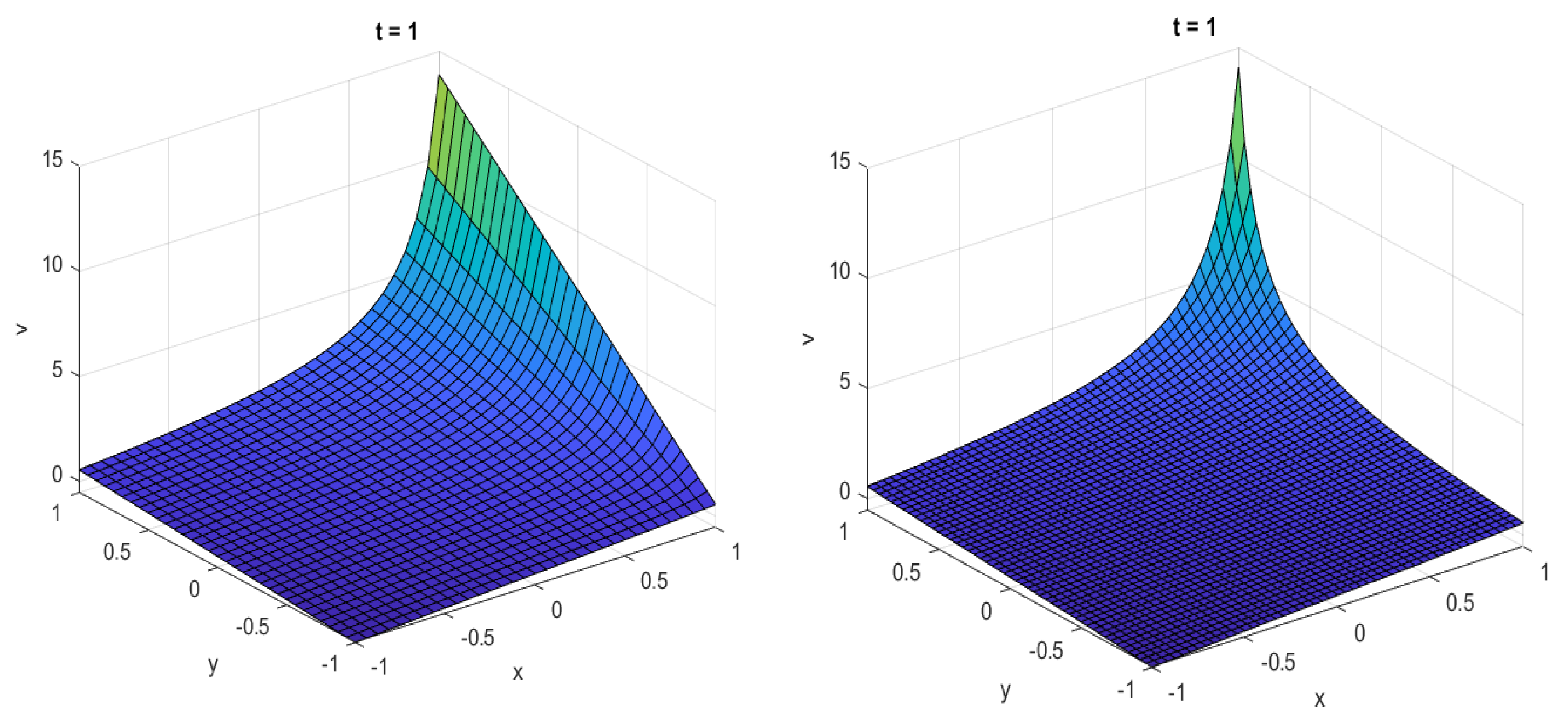
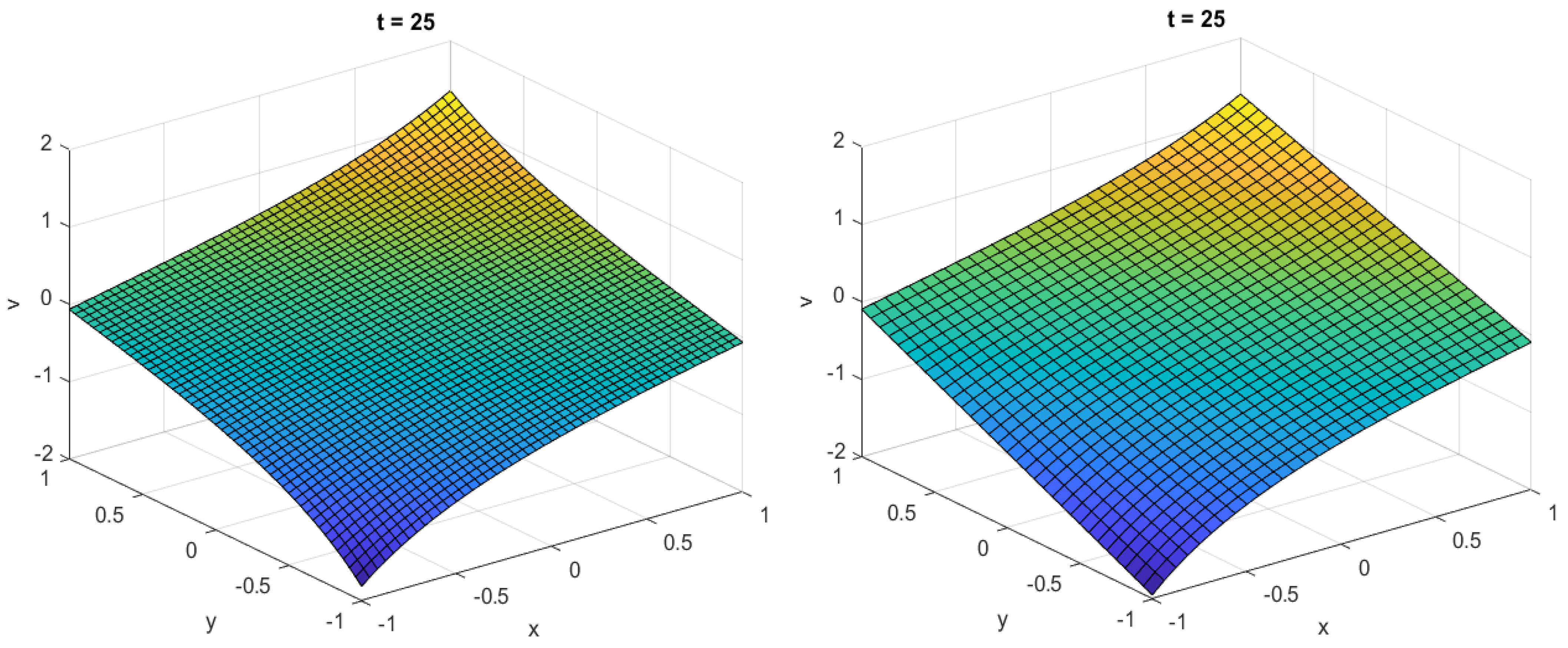
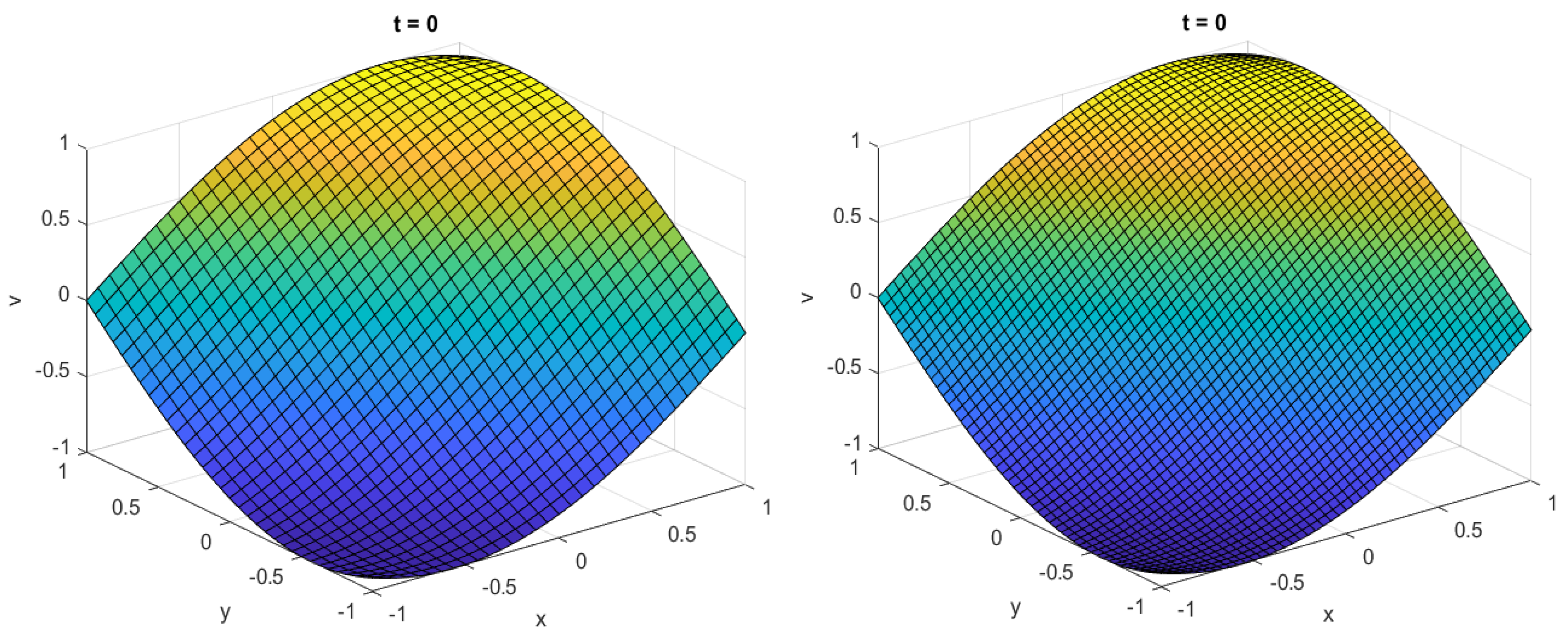
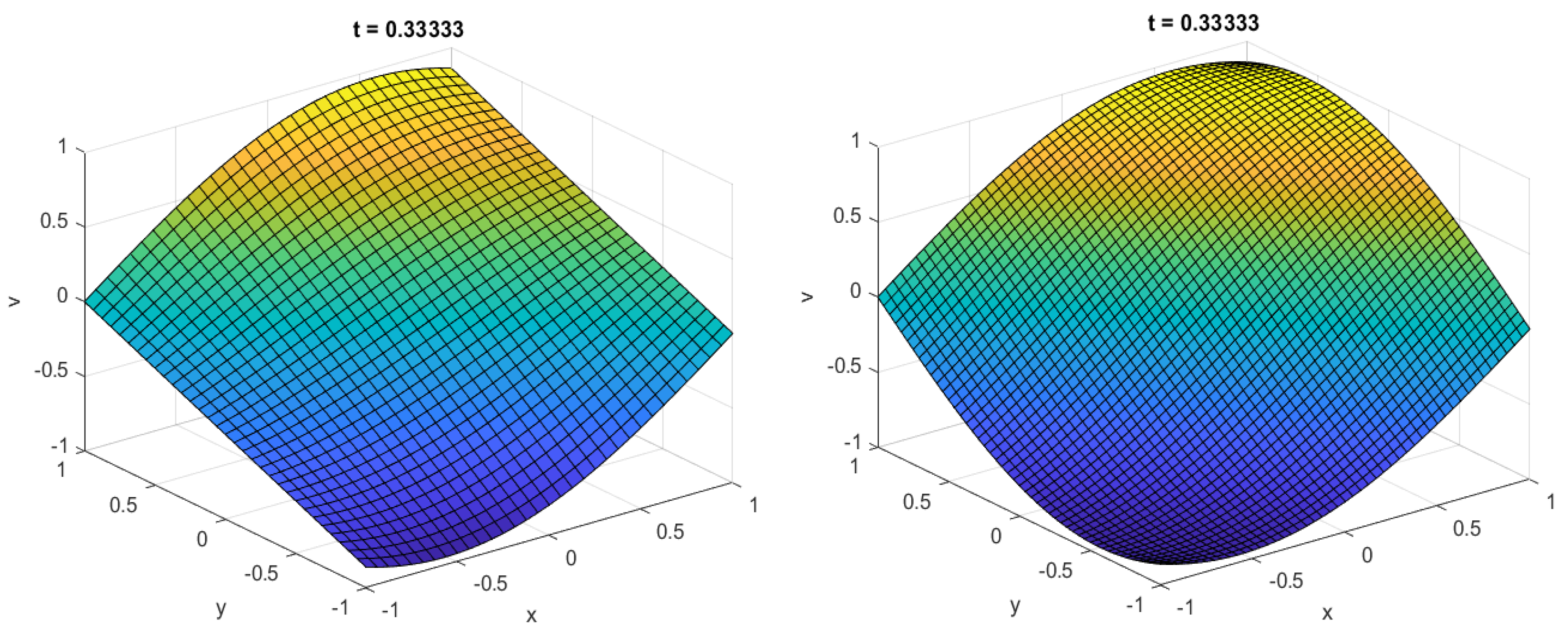
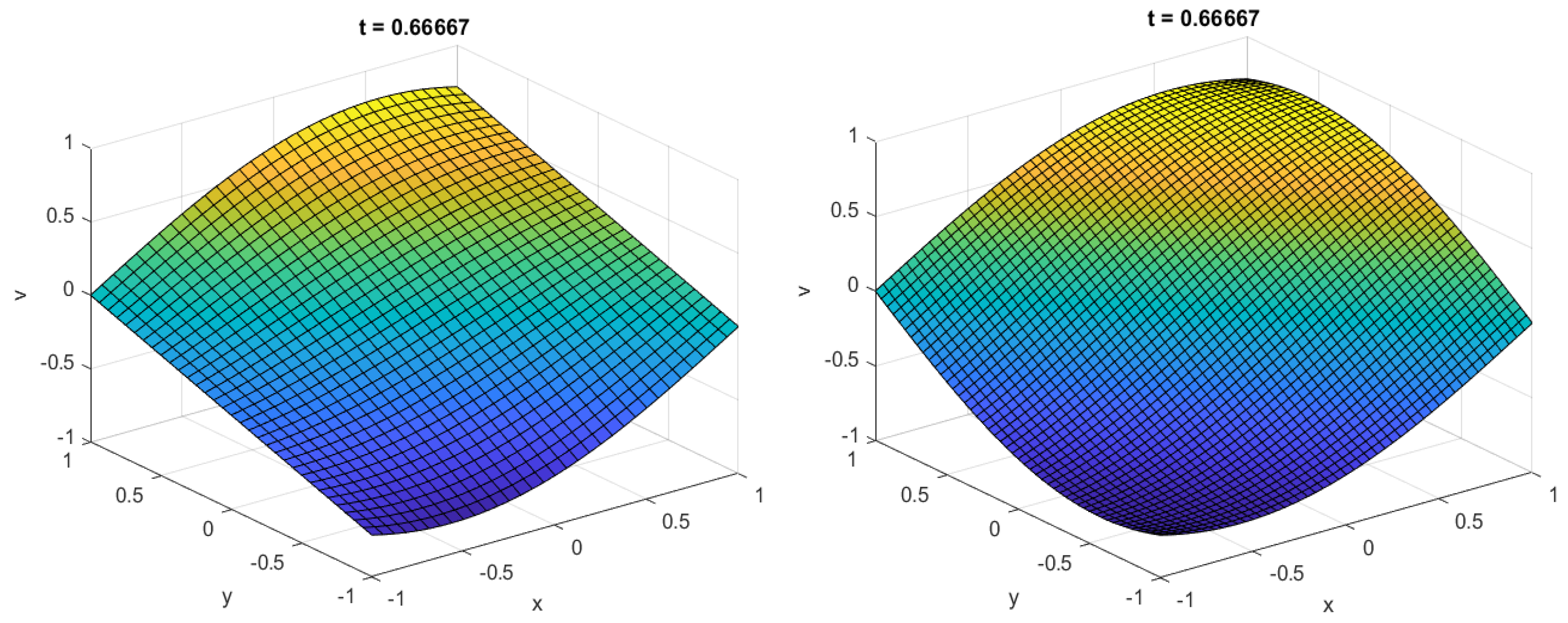
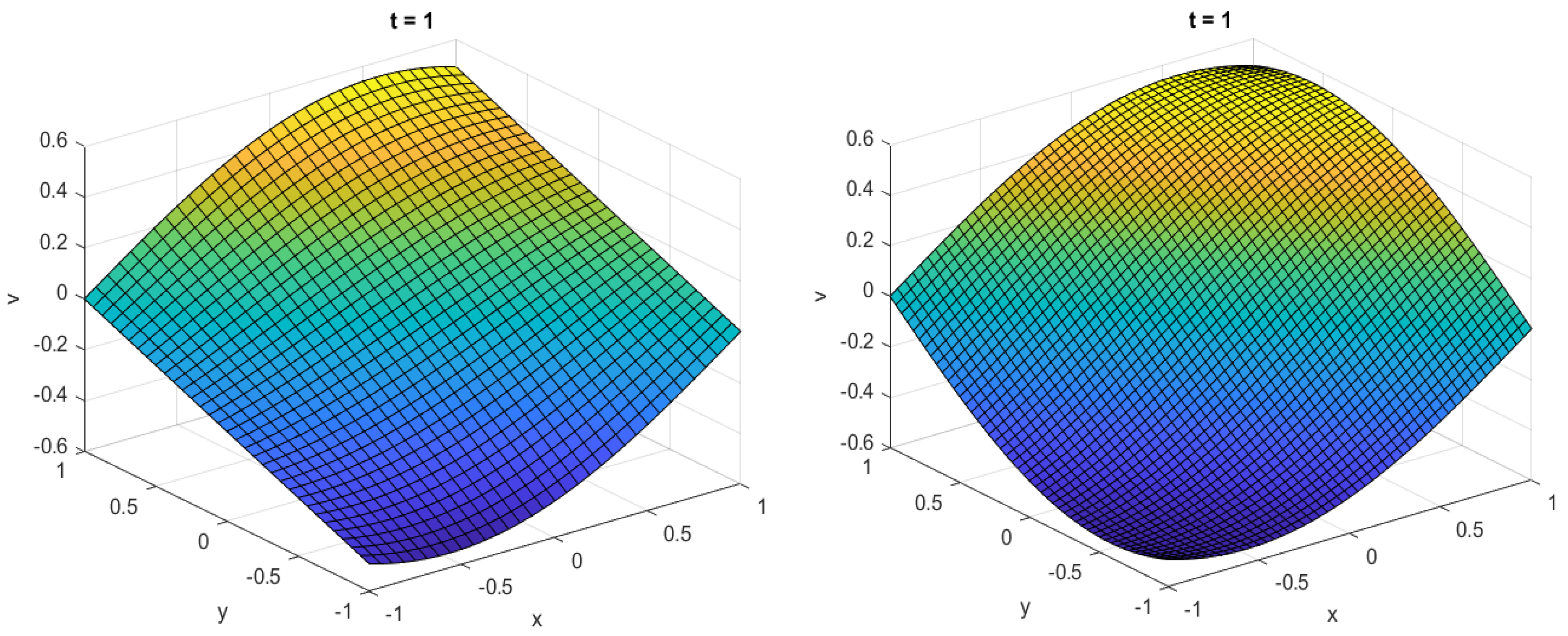
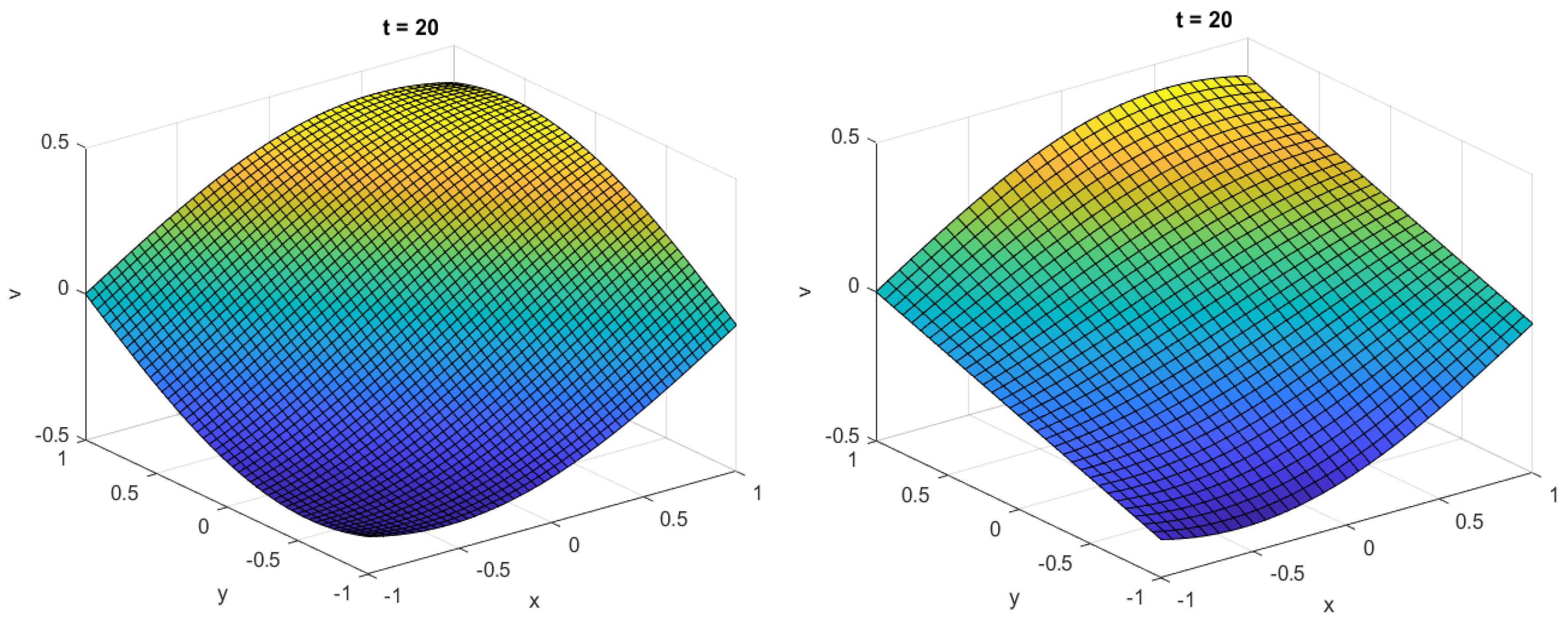
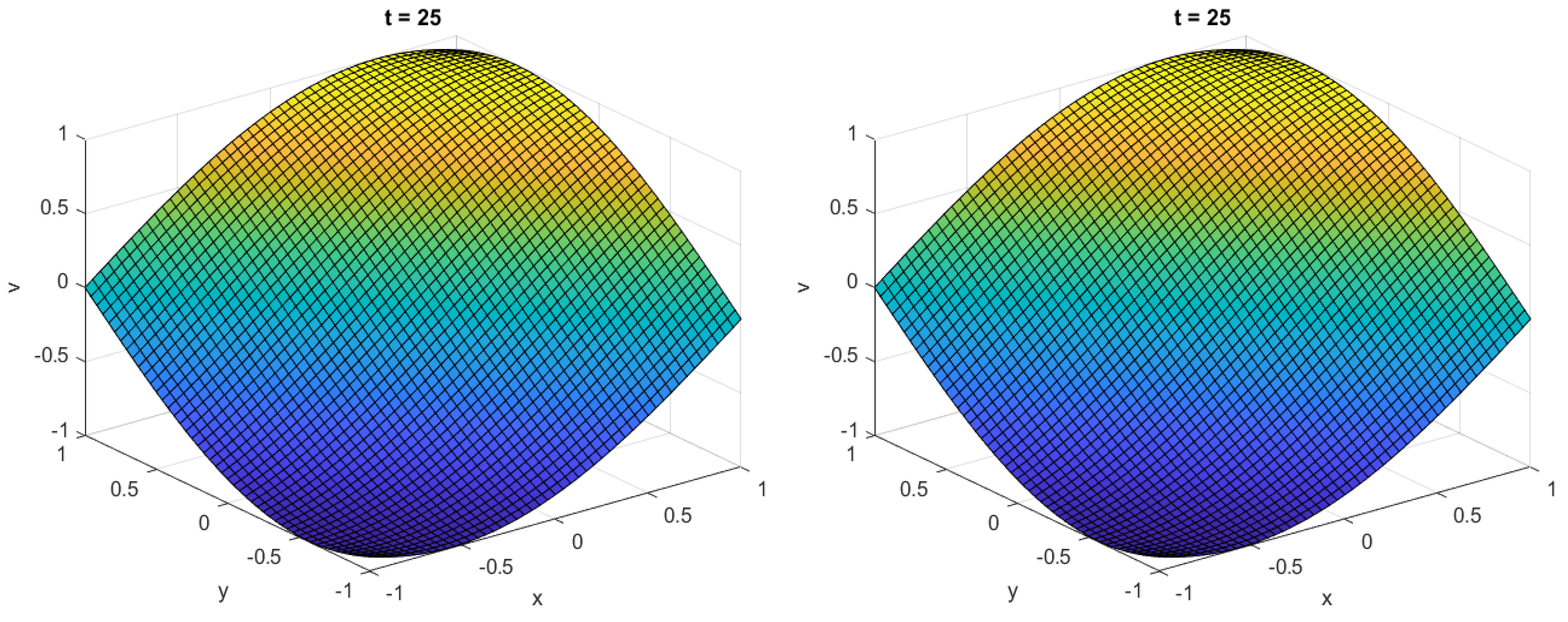
4. Numerical Examples
4.1. Example 1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | ||||||
|---|---|---|---|---|---|---|
| 0 | ||||||
| 0 | ||||||
| 0 |






4.2. Example 2
| Error | ||||||
|---|---|---|---|---|---|---|
| 0 | ||||||
| 0 | ||||||
| 0 |






5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Canuto, H.; Quaterolli, Z. Spectral Methods; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Gottlieb, D.; Orszag, S.A. Numerical Analysis of Spectral Methods: Theory and Applications; SIAM: Philadelphia, PA, USA, 1977. [Google Scholar]
- Trefethen, L.N. Spectral Methods in MATLAB; SIAM: Philadelphia, PA, USA, 2000. [Google Scholar]
- Ali, I.; Khan, S.U. A Dynamic Competition Analysis of Stochastic Fractional Differential Equation Arising in Finance via Pseudospectral Method. Mathematics 2023, 11, 1328. [Google Scholar] [CrossRef]
- Ali, I.; Saleem, M.T. Spatiotemporal Dynamics of Reaction-Diffusion System and Its Application to Turing Pattern Formation in a Gray-Scott Model. Mathematics 2023, 11, 1459. [Google Scholar] [CrossRef]
- Khan, S.U.; Ali, M.; Ali, I. A spectral collocation method for stochastic Volterra integro-differential equations and its error analysis. Adv. Differ. Equ. 2019, 1, 161. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; Khan, S.U.; Ali, I.; Khan, F.U. On dynamics of stochastic avian influenza model with asymptomatic carrier using spectral method. Math. Methods Appl. Sci. 2022, 45, 8230–8246. [Google Scholar] [CrossRef]
- Khan, S.U.; Ali, I. Convergence and error analysis of a spectral collocation method for solving system of nonlinear Fredholm integral equations of second kind. Comput. Appl. Math. 2019, 38, 125. [Google Scholar] [CrossRef]
- Dang, W.; Guo, J.; Liu, M.; Liu, S.; Yang, B.; Yin, L.; Zheng, W. A Semi-Supervised Extreme Learning Machine Algorithm Based on the New Weighted Kernel for Machine Smell. Appl. Sci. 2022, 12, 9213. [Google Scholar] [CrossRef]
- Lu, S.; Guo, J.; Liu, S.; Yang, B.; Liu, M.; Yin, L.; Zheng, W. An Improved Algorithm of Drift Compensation for Olfactory Sensors. Appl. Sci. 2022, 12, 9529. [Google Scholar] [CrossRef]
- Lu, S.; Ban, Y.; Zhang, X.; Yang, B.; Yin, L.; Liu, S.; Zheng, W. Adaptive control of time delay teleoperation system with uncertain dynamics. Front. Neurorobot. 2022, 16, 152. [Google Scholar] [CrossRef]
- Ma, J.; Hu, J. Safe consensus control of cooperative-competitive multi-agent systems via differential privacy. Kybernetika 2022, 58, 426–439. [Google Scholar] [CrossRef]
- Liu, Q.; Peng, H.; Wang, Z.-A. Convergence to nonlinear diffusion waves for a hyperbolic-parabolic chemotaxis system modelling vasculogenesis. J. Differ. Equ. 2022, 314, 251–286. [Google Scholar] [CrossRef]
- Tautz, R.C.; Lerche, I. Application of the three-dimensional telegraph equation to cosmic-ray transport. Res. Astron. Astrophys. 2016, 16, 162. [Google Scholar] [CrossRef] [Green Version]
- Debnath, L.; Mikusinski, P. Introduction to Hilbert Spaces with Applications; Academic Press: Cambridge, MA, USA, 2005. [Google Scholar]
- El-Azab, M.S.; El-Gamel, M. A numerical algorithm for the solution of telegraph equations. Appl. Math. Comput. 2007, 190, 757–764. [Google Scholar] [CrossRef]
- Patel, V.K.; Bahuguna, D. Numerical and approximate solutions for two-dimensional hyperbolic telegraph equation via wavelet matrices. Proc. Natl. Acad. Sci. India Sect. Phys. Sci. 2022, 92, 605–623. [Google Scholar] [CrossRef]
- Metaxas, A.C.; Meredith, R.J. (Eds.) Industrial Microwave Heating; Peter Peregrinus Ltd.: London, UK, 1993. [Google Scholar]
- Weston, V.H.; He, S. Wave splitting of the telegraph equation in R3and its application to inverse scattering. Inverse Probl. 1993, 9, 789. [Google Scholar] [CrossRef]
- Banasiak, J.; Mika, J.R. Singularly perturved telegraph equations with applications in the random walk theory. J. Appl. Math. Stoch. Anal. 1998, 11, 9. [Google Scholar] [CrossRef] [Green Version]
- Alpert, B.; Beylkin, G.; Gines, D.; Vozovoi, L. Adaptive solution of partial differential equations in multi-wavelet bases. J. Comput. Phys. 2002, 182, 149–190. [Google Scholar] [CrossRef] [Green Version]
- Dehghan, M.; Saray, B.N.; Lakestani, M. Mixed finite difference and Galerkin methods for solving Burgers equations using interpolating scaling functions. Math. Method Appl. Sci. 2014, 37, 894–912. [Google Scholar] [CrossRef]
- Hovhannisyan, N.; Muller, S.; Schafer, R. Adaptive multiresolution discontinuous Galerkin schemes—For conservation laws. Math. Comput. 2014, 83, 113–151. [Google Scholar] [CrossRef] [Green Version]
- Saray, B.N.; Lakestani, M.; Cattani, C. Evaluation of mixed Crank-Nicolson scheme and Tau method for the solution of Klein-Gordon equation. Appl. Math. Comput. 2018, 331, 169–181. [Google Scholar]
- Dehghan, M.; Mohammadi, V. Two numerical meshless techniques based on radial basis functions (RBFs) and the method of generalized moving least squares (GMLS) for simulation of coupled Klein Gordon Schrodinger (KGS) equations. Comput. Math. Appl. 2016, 71, 892–921. [Google Scholar] [CrossRef]
- Chan, H.F.; Fan, C.M.; Kuo, C.W. Generalized finite difference method for solving two-dimensional non-linear obstacle problems. Eng. Anal. Bound. Elem. 2013, 37, 1189–1196. [Google Scholar] [CrossRef]
- Dehghan, M.; Saadatmandi, A. Numerical solution of hyperbolic telegraph equation using the Chebyshev tau method. Numer. Methods Partial Differ. Equ. 2010, 26, 239–252. [Google Scholar]
- Dehghan, M.; Ghesmati, A. Solution of the second-order one-dimensional hyperbolic telegraph equation by using the dual reciprocity boundary integral equation (DRBIE) method. Eng. Anal. Bound. Elem. 2010, 34, 51–59. [Google Scholar] [CrossRef]
- Jiwari, R.; Pandit, S.; Mittal, R.C. A differential quadrature algorithm for solution of the second order one dimensional hyperbolic telegraph equation. For. Ecol. Manag. 2012, 249, 5–17. [Google Scholar]
- Dehghan, M.; Ghesmati, A. Combination of meshless local weak and strong (MLWS) forms to solve the two dimensional hyperbolic telegraph equation. Eng. Anal. Bound. Elem. 2010, 34, 324–336. [Google Scholar] [CrossRef]
- Xie, S.S.; Yi, S.C.; Kwon, T.I. Fourth-order compact difference and alternating direction implicit schemes for telegraph equations. Comput. Phys. Commun. 2012, 183, 552–569. [Google Scholar] [CrossRef]
- Dehghan, M.; Satehi, R. A method based on meshless approach for the numerical solution of the two-space dimensional hyperbolic telegraph equation. Math. Methods Appl. Sci. 2012, 35, 220–1233. [Google Scholar] [CrossRef]
- Lin, J.; Chen, F.; Zhang, Y.; Lu, J. An accurate meshless collocation technique for solving two- dimensional hyperbolic telegraph equations in arbitrary domains. Eng. Anal. Bound. Elem. 2019, 108, 372–384. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, Y.; Cao, J.; Tian, J. A class of difference scheme for solving telegraph equation by new non-polynomial spline methods. Appl. Math. Comput. 2012, 218, 4671–4683. [Google Scholar] [CrossRef]
- Aloy, R.; Casaban, M.C.; Caudillo-Mata, L.A.; Jodar, L. Computing the variable coefficient telegraph equation using a discrete eigenfunctions method. Comput. Math. Appl. 2007, 54, 448–458. [Google Scholar] [CrossRef] [Green Version]
- Biazar, J.; Eslami, M. Analytic solution for Telegraph equation by differential transform method. Phys. Lett. A 2010, 374, 2904–2906. [Google Scholar] [CrossRef]
- Biazar, J.; Ebrahimi, H. An approximation to the solution of telegraph equation by adomian decomposition method. Int. Math. Forum 2007, 2, 2231–2236. [Google Scholar] [CrossRef] [Green Version]
- Yao, H. Reproducing kernel method for the solution of nonlinear hyperbolic telegraph equation with an integral condition. Numer. Methods Partial Differ. Equ. 2011, 27, 867–886. [Google Scholar] [CrossRef]
- Urena, F.; Gavete, L.; Benito, J.J.; Garcia, A.; Vargas, A.M. Solving the telegraph equation in 2-D and 3-D using generalized finite difference method (GFDM). Eng. Anal. Bound. Elem. 2020, 112, 13–24. [Google Scholar] [CrossRef]
- Jebreen, H.B.; Cano, Y.C.; Dassios, I. An efficient algorithm based on the multi-wavelet Galerkin method for telegraph equation. AIMS Math. 2021, 6, 1296–1308. [Google Scholar] [CrossRef]
- Kapoor, M.; Shah, N.A.; Saleem, S.; Weera, W. An Analytical Approach for Fractional Hyperbolic Telegraph Equation Using Shehu Transform in One, Two and Three Dimensions. Mathematics 2022, 10, 1961. [Google Scholar] [CrossRef]
- Shah, N.A.; Dassios, I.; Chung, J.D. A Decomposition Method for a Fractional-Order Multi-Dimensional Telegraph Equation via the Elzaki Transform. Symmetry 2021, 13, 8. [Google Scholar] [CrossRef]
- Dehghan, M.; Shokri, A. A numerical method for solving the hyperbolic telegraph equation. Numer. Methods Partial Differ. Equ. 2008, 24, 1080–1093. [Google Scholar] [CrossRef]
- Bulbul, B.; Sezer, M. Taylor polynomial solution of hyperbolic type partial differential equations with constant coefficients. Int. J. Comput. 2011, 88, 533–544. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, Y. A new fourth-order compact finite difference scheme for the two-dimensional second-order hyperbolic equation. J. Comput. Appl. Math. 2009, 230, 626–632. [Google Scholar] [CrossRef] [Green Version]
- Erdem Bicer, K.; Yalcinba, S. Numerical solution of telegraph equation using Bernoulli collocation method. Proc. Natl. Acad. Sci. India Sect. Phys. Sci. 2019, 89, 769–775. [Google Scholar] [CrossRef]
- Javidi, M. Chebyshev Spectral Collocation Method for Computing Numerical Solution of Telegraph Equation. Comput. Methods Differ. Equ. 2013, 1, 16–29. [Google Scholar]
- Karp, D.; Prilepkina, E. Beyond the Beta Integral Method: Transformation Formulas for Hypergeometric Functions via Meijer’s G Function. Symmetry 2022, 14, 1541. [Google Scholar] [CrossRef]
- Ali, I.; Saleem, M.T. Applications of Orthogonal Polynomials in Simulations of Mass Transfer Diffusion Equation Arising in Food Engineering. Symmetry 2023, 15, 527. [Google Scholar] [CrossRef]
- Sitnik, S.M.; Yadrikhinskiy, K.V.; Fedorov, V.E. Symmetry Analysis of a Model of Option Pricing and Hedging. Symmetry 2022, 14, 1841. [Google Scholar] [CrossRef]
- Ali, I.; Khan, S.U. Asymptotic Behavior of Three Connected Stochastic Delay Neoclassical Growth Systems Using Spectral Technique. Mathematics 2022, 10, 3639. [Google Scholar] [CrossRef]
- Ali, I.; Khan, S.U. Threshold of Stochastic SIRS Epidemic Model from Infectious to Susceptible Class with Saturated Incidence Rate Using Spectral Method. Symmetry 2022, 14, 1838. [Google Scholar] [CrossRef]
- Ali, I.; Khan, S.U. Dynamics and simulations of stochastic COVID-19 epidemic model using Legendre spectral collocation method. AIMS Math. 2023, 8, 4220–4236. [Google Scholar] [CrossRef]
- Caratelli, D.; Ricci, P.E. A Note on the Orthogonality Properties of the Pseudo-Chebyshev Functions. Symmetry 2020, 12, 1273. [Google Scholar] [CrossRef]
- Reynolds, R.; Stauffer, A. A Note on the Summation of the Incomplete Gamma Function. Symmetry 2021, 13, 2369. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Alkhamisi, S.O. New Results of the Fifth-Kind Orthogonal Chebyshev Polynomials. Symmetry 2021, 13, 2407. [Google Scholar] [CrossRef]
- Heideman, M.T.; Johnson, D.H.; Burrus, C.S. Gauss and the history of the fast Fourier transform. Arch. Hist. Exact Sci. 1985, 34, 265–277. [Google Scholar] [CrossRef] [Green Version]
- Mastroianni, G.; Occorsio, D. Optional systems of nodes for Lagrange interpolation on bounded intervals. J. Comput. Appl. Math. 2001, 134, 325–341. [Google Scholar] [CrossRef] [Green Version]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, I.; Saleem, M.T.; Din, A.u. Special Functions and Its Application in Solving Two Dimensional Hyperbolic Partial Differential Equation of Telegraph Type. Symmetry 2023, 15, 847. https://doi.org/10.3390/sym15040847
Ali I, Saleem MT, Din Au. Special Functions and Its Application in Solving Two Dimensional Hyperbolic Partial Differential Equation of Telegraph Type. Symmetry. 2023; 15(4):847. https://doi.org/10.3390/sym15040847
Chicago/Turabian StyleAli, Ishtiaq, Maliha Tehseen Saleem, and Azhar ul Din. 2023. "Special Functions and Its Application in Solving Two Dimensional Hyperbolic Partial Differential Equation of Telegraph Type" Symmetry 15, no. 4: 847. https://doi.org/10.3390/sym15040847