


Modelling and Analysis of a Measles Epidemic Model with the Constant Proportional Caputo Operator
 , , and
, , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Fractional Order Model on Transmission Dynamics of Measles
3.1. Positiveness and Boundness of Solutions
3.2. Well-Posedness and Biological Feasibility
3.3. Disease-Free Equilibrium
3.4. Endemic Equilibrium
3.5. Reproductive Number
3.6. Strength Number
3.7. First Derivative of Lyapunov
3.8. Second Derivative of Lyapunov Function
3.9. Existence and Uniqueness Analysis
4. Analysis of the Proposed Model
4.1. Inverting by Fractional Calculus
4.2. Inverting by Laplace Transform
4.3. Further Analysis on CPC and Hilfer Generalised Proportional Operators
4.4. Eigenfunctions of the CPC Operator
5. Solution of System of Fractional Differential Equations by Using Laplace Adomian Decomposition Method
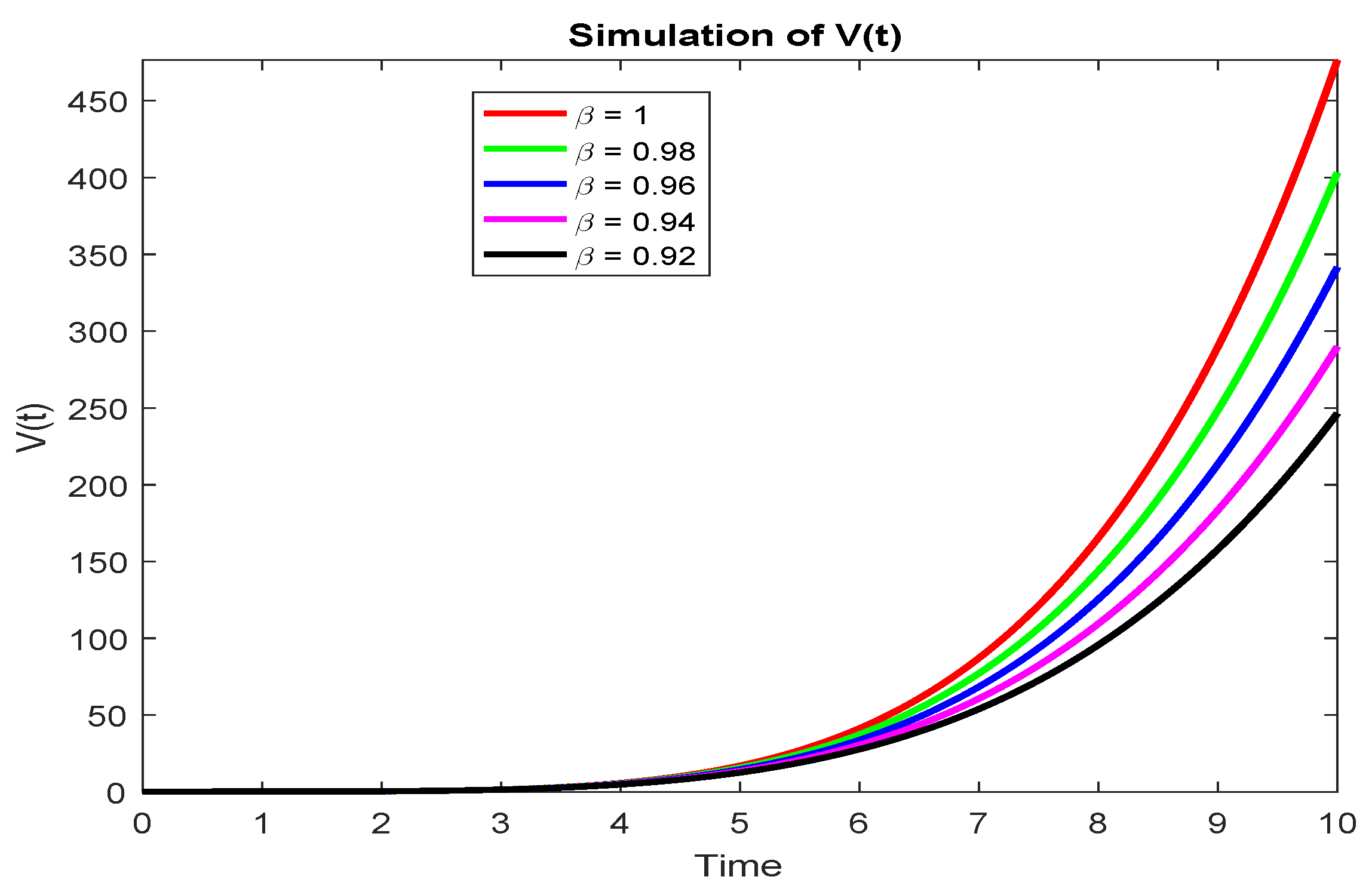
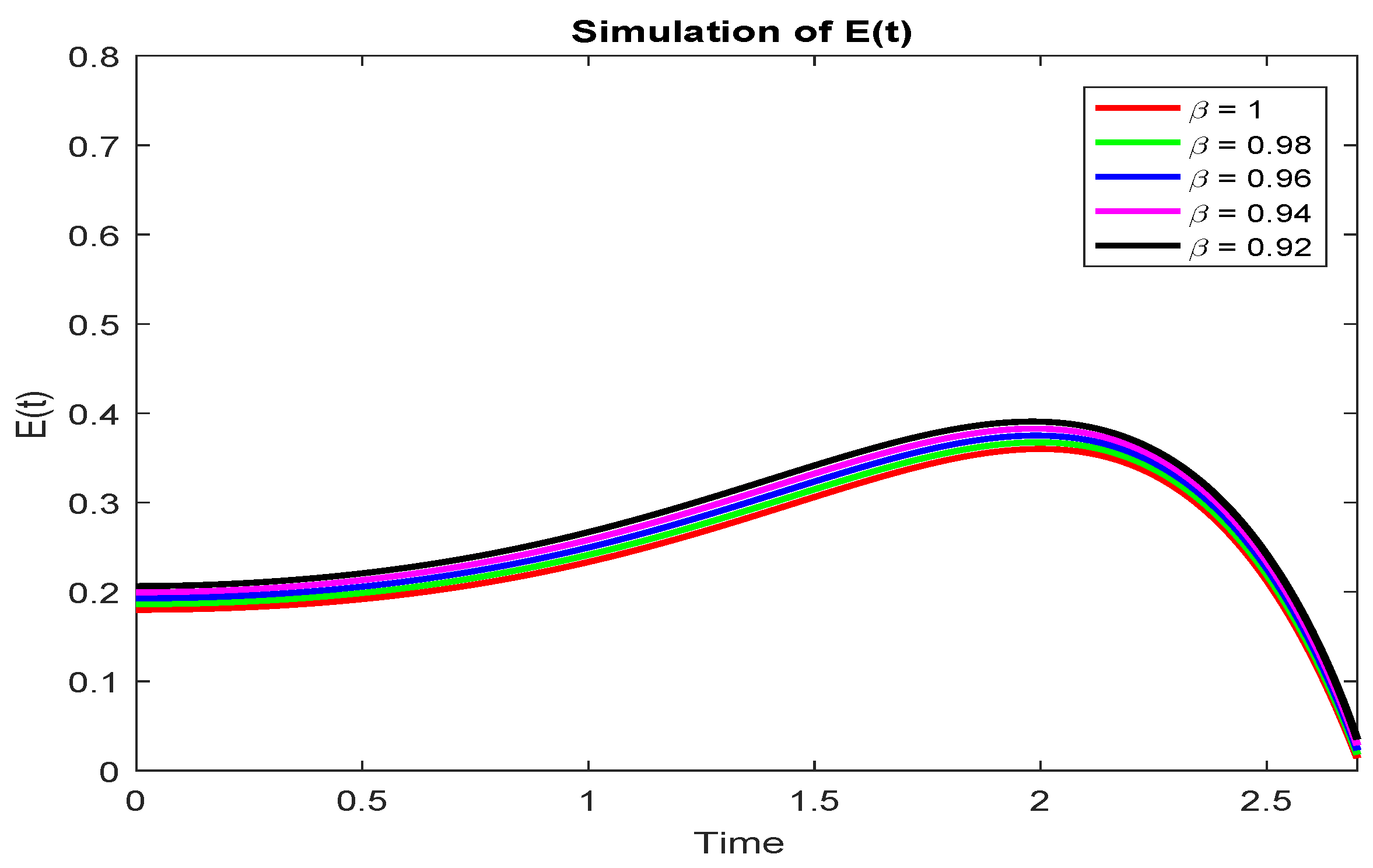
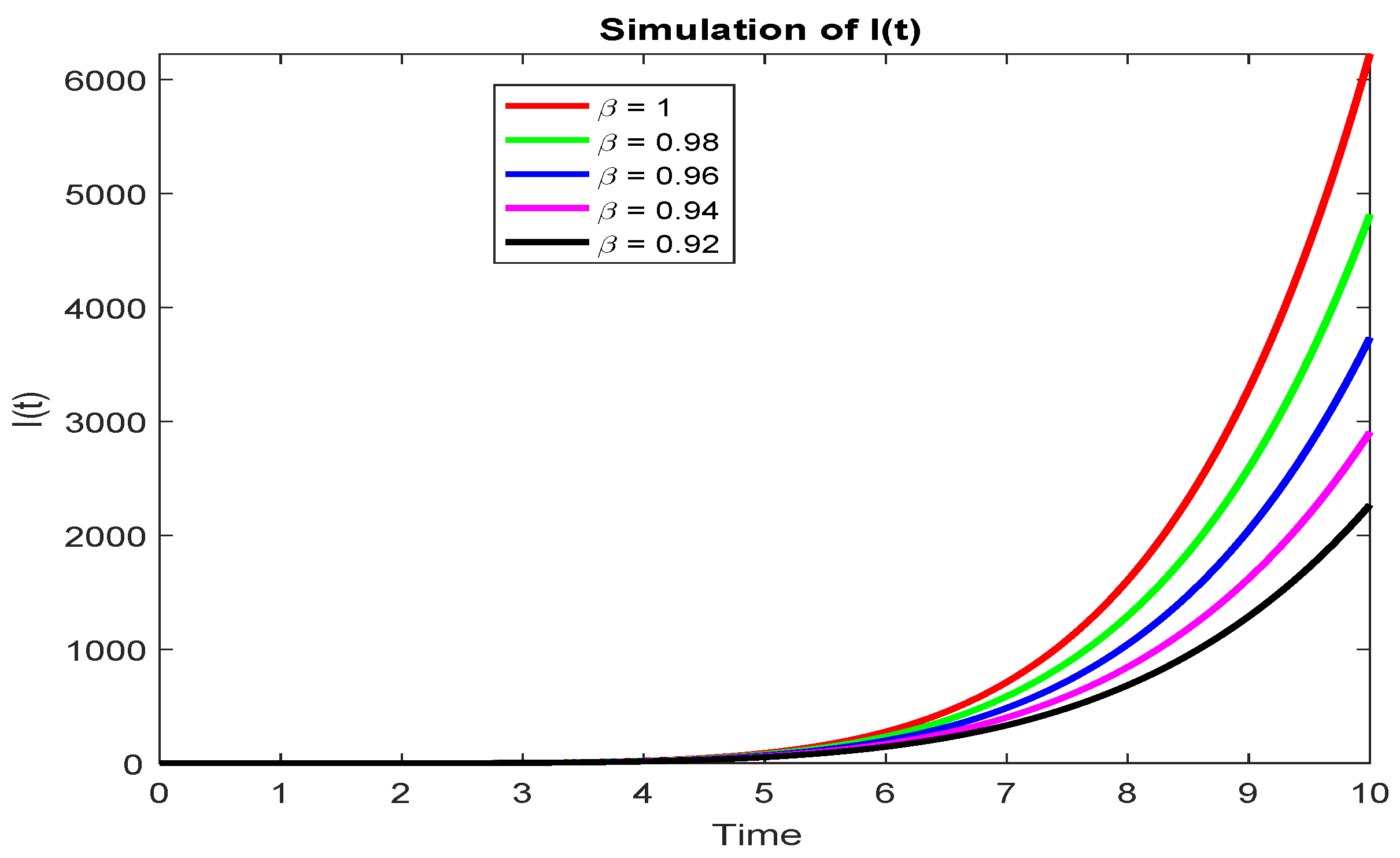
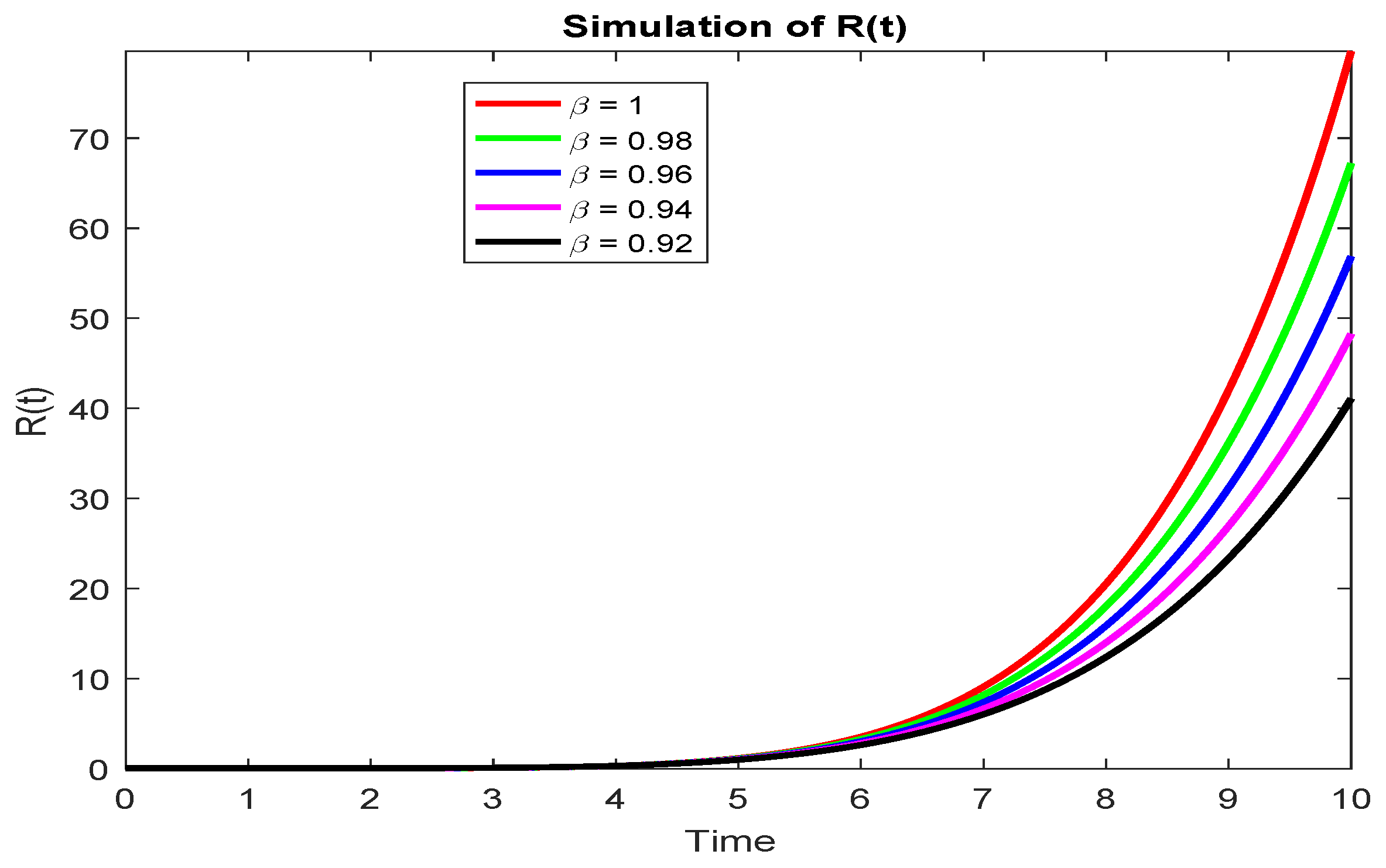
6. Result and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Griffin, D.E. The immune response in measles: Virus control, clearance and protective immunity. Viruses 2016, 8, 282. [Google Scholar] [CrossRef] [PubMed]
- Subaiya, S.; Tabu, C.; Nganga, J.; Awes, A.A.; Sergon, K.; Cosmas, L.; Styczynski, A.; Thuo, S.; Lebo, E.; Kaiser, R.; et al. Use of the revised World Health Organization cluster survey methodology to classify measles-rubella vaccination campaign coverage in 47 counties in Kenya, 2016. PLoS ONE 2018, 13, e0199786. [Google Scholar] [CrossRef] [PubMed]
- Guideline on Measles Surveillance and Outbreak Management. Available online: https://www.ephi.gov.et/images/guidelines/guideline-on-measles-surveillance-and-outbreak-management2012.pdf (accessed on 2 December 2022).
- Measles, Preprint 2018. Measles. Available online: https://www.who.int/news-room/fact-sheets/detail/measles (accessed on 2 December 2022).
- Farman, M.; Akgl, A.; Ahmad, A.; Baleanu, D.; Umer Saleem, M. Dynamical transmission of coronavirus model with analysis and simulation. Comput. Model. Eng. Sci. 2021, 127, 753–769. [Google Scholar] [CrossRef]
- El Hajji, M.; Albargi, A.H. A mathematical investigation of an SVEIR epidemic model for the measles transmission. Math. Biosc. Eng. 2022, 19, 2853–2875. [Google Scholar] [CrossRef] [PubMed]
- Tabassum, M.F.; Akgul, A.; Akram, S.; Farman, M.; Karim, R.; Hassan, S.M.U. Treatment of dynamical nonlinear Measles model: An evolutionary approach. Int. J. Nonlinear Anal. Appl. 2022, 13, 1629–1638. [Google Scholar]
- Mitku, S.N.; Koya, P.R. Mathematical modeling and simulation study for the control and transmission dynamics of measles. Am. J. Appl. Math. 2017, 5, 99–107. [Google Scholar] [CrossRef]
- Paul, R.V.; Atokolo, W.; Saka, S.A.; Joseph, A.O. Modeling the Transmission Dynamics of Measles in the Presence of Treatment as Control Strategy. Math. Sci. 2021, 17, 76–86. [Google Scholar] [CrossRef]
- James Peter, O.; Ojo, M.M.; Viriyapong, R.; Abiodun Oguntolu, F. Mathematical model of measles transmission dynamics using real data from Nigeria. J. Differ. Equ. Appl. 2022, 28, 753–770. [Google Scholar] [CrossRef]
- Farooq, M.M.; Mohsin, M.; Farman, M.; Akgl, A.; Saleem, M.U. Generalization method of generating the continuous nested distributions. Int. J. Nonlinear Sci. Numer. Simul. 2022. epub ahead of print. [Google Scholar] [CrossRef]
- Xu, C.; Farman, M.; Akgl, A.; Nisar, K.S.; Ahmad, A. Modeling and analysis fractal order cancer model with effects of chemotherapy. Chaos Solitons Fractals 2022, 161, 112325. [Google Scholar] [CrossRef]
- Farman, M.; Aslam, M.; Akgl, A.; Jarad, F. On Solutions of the Stiff Differential Equations in Chemistry Kinetics with Fractal-Fractional Derivatives. J. Comput. Nonlinear Dyn. 2022, 17, 071007. [Google Scholar] [CrossRef]
- Farman, M.; Akgl, A.; Ahmad, A.; Saleem, M.U.; Ahmad, M.O. Modeling and analysis of computer virus fractional order model. In Methods of Mathematical Modelling; Academic Press: Cambridge, MA, USA, 2022; pp. 137–157. [Google Scholar]
- Doungmo Goufo, E.F.; Oukouomi Noutchie, S.C.; Mugisha, S. A fractional SEIR epidemic model for spatial and temporal spread of measles in metapopulations. Abstr. Appl. Anal. 2014, 2014, 781028. [Google Scholar]
- Nazir, G.; Shah, K.; Alrabaiah, H.; Khalil, H.; Khan, R.A. Fractional dynamical analysis of measles spread model under vaccination corresponding to nonsingular fractional order derivative. Adv. Differ. Equ. 2020, 2020, 171. [Google Scholar] [CrossRef]
- Farman, M.; Saleem, M.U.; Ahmad, A.; Ahmad, M.O. Analysis and numerical solution of SEIR epidemic model of measles with non-integer time fractional derivatives by using Laplace Adomian Decomposition Method. Ain Shams Eng. J. 2018, 9, 3391–3397. [Google Scholar] [CrossRef]
- Ogunmiloro, O.M.; Idowu, A.S.; Ogunlade, T.O.; Akindutire, R.O. On the Mathematical Modeling of Measles Disease Dynamics with Encephalitis and Relapse Under the Atangana Baleanu Caputo Fractional Operator and Real Measles Data of Nigeria. Int. J. Appl. Comput. Math. 2021, 7, 1–20. [Google Scholar] [CrossRef]
- Qureshi, S. Real life application of Caputo fractional derivative for measles epidemiological autonomous dynamical system. Chaos Solitons Fractals 2020, 134, 109744. [Google Scholar] [CrossRef]
- Abboubakar, H.; Fandio, R.; Sofack, B.S.; Ekobena Fouda, H.P. Fractional dynamics of a measles epidemic model. Axioms 2022, 11, 363. [Google Scholar] [CrossRef]
- Qureshi, S. Monotonically decreasing behavior of measles epidemic well captured by Atangana Baleanu Caputo fractional operator under real measles data of Pakistan. Chaos Solitons Fractals 2020, 131, 109478. [Google Scholar] [CrossRef]
- Nuwahereze, D.; Onuorah, M.O.; Abdulahi, B.M.; Kabandana, I. Standard Incidence Model of Measles with two Vaccination Strategies. World Sci. News 2022, 170, 149–171. [Google Scholar]
- Kumar, S.; Kumar, R.; Osman, M.S.; Samet, B. A wavelet based numerical scheme for fractional order SEIR epidemic of measles by using Genocchi polynomials. Numer. Methods Partial. Differ. Equ. 2021, 37, 1250–1268. [Google Scholar] [CrossRef]
- Farman, M.; Akgl, A.; Tekin, M.T.; Akram, M.M.; Ahmad, A.; Mahmoud, E.E.; Yahia, I.S. Fractal fractional-order derivative for HIV/AIDS model with Mittag–Leffler kernel. Alex. Eng. J. 2022, 61, 10965–10980. [Google Scholar] [CrossRef]
- Yang, X.; Su, Y.; Yang, L.; Zhuo, X. Global analysis and simulation of a fractional order HBV immune model. Chaos Solitons Fractals 2022, 154, 111648. [Google Scholar] [CrossRef]
- Baleanu, D.; Ghassabzade, F.A.; Nieto, J.J.; Jajarmi, A. On a new and generalized fractional model for a real cholera outbreak. Alex. Eng. J. 2022, 61, 9175–9186. [Google Scholar] [CrossRef]
- Farman, M.; Amin, M.; Akgl, A.; Ahmad, A.; Riaz, M.B.; Ahmad, S. Fractal fractional operator for COVID-19 (Omicron) variant outbreak with analysis and modeling. Results Phys. 2022, 39, 105630. [Google Scholar] [CrossRef] [PubMed]
- Eskandari, Z.; Avazzadeh, Z.; Khoshsiar Ghaziani, R.; Li, B. Dynamics and bifurcations of a discrete-time Lotka Volterra model using nonstandard finite difference discretization method. Math. Methods Appl. Sci. 2022. early view. [Google Scholar] [CrossRef]
- Xu, C.; ur Rahman, M.; Baleanu, D. On fractional-order symmetric oscillator with offset-boosting control. Nonlinear Anal. Model. Control 2022, 27, 994–1008. [Google Scholar] [CrossRef]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. A Lyapunov approach to the stability of fractional differential equations. Signal Process. 2011, 91, 437–445. [Google Scholar] [CrossRef]
- Xu, C.; Farman, M.; Hasan, A.; Akgl, A.; Zakarya, M.; Albalawi, W.; Park, C. Lyapunov Stability and Wave Analysis of COVID-19 Omicron Variant of Real Data with Fractional Operator. Alex. Eng. J. 2022, 61, 11787–11802. [Google Scholar] [CrossRef]
- Almeida, R.; Agarwal, R.P.; Hristova, S.; O’Regan, D. Quadratic Lyapunov Functions for Stability of the Generalized Proportional Fractional Differential Equations with Applications to Neural Networks. Axioms 2021, 10, 322. [Google Scholar] [CrossRef]
- Saleem, M.U.; Farman, M.; Ahmad, A.; Ehasan, H.; Ahmad, M.O. A Caputo Fabrizio Fractional Order Model for Control of Glucose in Insulin Therapies for Diabetes. Ain Shams Eng. J. 2018, 11, 1309–1316. [Google Scholar] [CrossRef]
- Ali, A.; Erturk, V.S.; Zeb, A.; Khan, R.A. Numerical solution of fractional order immunology and aids model via Laplace transform Adomian decomposition method. J. Fract. Calcul. Appl. 2019, 10, 242–252. [Google Scholar]
- Baleanu, D.; Aydogn, S.M.; Mohammadi, H.; Rezapour, S. On modelling of epidemic childhood diseases with the Caputo-Fabrizio derivative by using the Laplace Adomian decomposition method. Alex. Eng. J. 2020, 59, 3029–3039. [Google Scholar] [CrossRef]
- Sweilam, N.H.; Al-Mekhlafi, S.M.; Baleanu, D. A hybrid fractional optimal control for a novel Coronavirus (2019-nCov) mathematical model. J. Adv. Res. 2021, 32, 149–160. [Google Scholar] [CrossRef]
- Gnerhan, H.; Dutta, H.; Dokuyucu, M.A.; Adel, W. Analysis of a fractional HIV model with Caputo and constant proportional Caputo operators. Chaos Solitons Fractals 2020, 139, 110053. [Google Scholar] [CrossRef]
- Baleanu, D.; Fernandez, A.; Akgl, A. On a fractional operator combining proportional and classical differintegrals. Mathematics 2020, 8, 360. [Google Scholar] [CrossRef]
- Anderson, D.R.; Ulness, D.J. Newly defined conformable derivatives. Adv. Dyn. Syst. Appl. 2015, 10, 109–137. [Google Scholar]
- Van den Driessche, P.; Watmough, J. Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math. Biosci. 2002, 180, 29–48. [Google Scholar] [CrossRef]
- Ahmed, I.; Kumam, P.; Jarad, F.; Borisut, P.; Jirakitpuwapat, W. On Hilfer generalized proportional fractional derivative. Adv. Differ. Equ. 2020, 2020, 329. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farman, M.; Shehzad, A.; Akgül, A.; Baleanu, D.; Sen, M.D.l. Modelling and Analysis of a Measles Epidemic Model with the Constant Proportional Caputo Operator. Symmetry 2023, 15, 468. https://doi.org/10.3390/sym15020468
Farman M, Shehzad A, Akgül A, Baleanu D, Sen MDl. Modelling and Analysis of a Measles Epidemic Model with the Constant Proportional Caputo Operator. Symmetry. 2023; 15(2):468. https://doi.org/10.3390/sym15020468
Chicago/Turabian StyleFarman, Muhammad, Aamir Shehzad, Ali Akgül, Dumitru Baleanu, and Manuel De la Sen. 2023. "Modelling and Analysis of a Measles Epidemic Model with the Constant Proportional Caputo Operator" Symmetry 15, no. 2: 468. https://doi.org/10.3390/sym15020468