1. Introduction
In spatial kinematic, the movement of the one-parameter family of circles with a fixed radius generates a circular surface, while the movement of a one-parameter family of lines generates a ruled surface. A circular surface has a spine curve, and a ruled surface has a striction curve. The envelope of a set of circle planes is a tangent-developable ruled surface. The characteristics of a tangent-ruled surface are straight lines, which are tangent to the edge of regression. The edge of regression constitutes the singular points of the tangent-developable ruled surface [
1,
2,
3,
4,
5,
6]. Because of this relationship between ruled and circular surfaces, geometers have intention on circular surfaces in Euclidean and Minkowski 3-spaces. For example, Izumiya et al. [
7] examined different geometric possessions and singularities of circular surfaces by comparing with those of ruled surfaces. In [
8], the authors introduced great circular surfaces defined as a one-parameter family of great circles in the three sphere, obtained a common classification of singularities of such surfaces, and researched the geometric explanations from the viewpoint of spherical geometry. In [
9], a new category of circular surfaces in Euclidean 3-space defined by a curve and a congruence of circles was constructed. The authors especially examine some geometrical characterization of circular surfaces when the base curve is an algebraic curve. In [
10], Alluhaibi studied the singularity properties of circular surfaces in Euclidean 3-space. In [
11], spacelike circular surfaces in Minkowski 3-space defined by a smooth one-parameter family of spacelike circles were investigated, and several geometric possessions were obtained. Furthermore, the authors defined spacelike roller coaster surfaces, which are obtained as spacelike circular surfaces whose generating circles are curvature lines, and obtained a parametric equation of a spacelike roller coaster surface along a spacelike base curve with spacelike principal normality. Tuncer et al. [
12], reconstruct equations of spacelike circular surfaces and spacelike roller coaster surfaces by using unit split quaternions and homothetic movements. Furthermore, they parametrize timelike circular surfaces by using unit split quaternions and homothetic movements and give the conditions for timelike roller coaster surfaces to be flat or minimal surfaces. In [
13], Abdel-Baky et al. considered the geometric properties of timelike circular surfaces in Minkowski 3-space. After that, Yanlin et al. studied the timelike circular surfaces in Minkowski 3-space from the viewpoint of singularity theory. They presented singularities and symmetry properties of timelike circular surfaces in Minkowski 3-space [
14]. Moreover, some of the latest connected studies about symmetry and singularity can be seen in [
15,
16,
17,
18,
19,
20,
21,
22,
23].
The present work includes the following:
Section 3 gives definitions and studies the geometry of spacelike circular surfaces with fixed radii that can be swept along a non-null curve (the spine curve) via moving the position of a Lorentzian circle with its center as a generating circle. Then, in analogy to [
6,
7], we characterize non-null curves as striction curves on spacelike circular surfaces. Furthermore, we provide an investigation into local singular points of spacelike circular surfaces. We also introduce roller coaster spacelike surfaces as a special class of spacelike circular surfaces. Lastly, we give some examples of roller coaster spacelike surfaces by using computer-aided graphics.
2. Basic Concepts
The Minkowski 3-space denoted by
is defined as the real vector space
with the metric [
24,
25,
26]
A vector
is said to be spacelike if
or
=
, timelike if
, and lightlike or null if
and
. A timelike or light-like vector in
is said to be causal. For
, the norm is defined by
; then, the vector
is called a spacelike unit vector if
and a timelike unit vector if
. Similarly, a regular curve in
can locally be spacelike, timelike, or null (lightlike) if all of its velocity vectors are spacelike, timelike, or null (lightlike), respectively. For any two vectors
and
of
, the vector product is defined by
where
,
,
is the canonical basis of
. The angle between two vectors in Minkowski space is defined as follows.
Definition 1 (i) Spacelike angle: Let and be spacelike vectors in that span a spacelike vector subspace; then, we have ; hence, there is a unique real number such that . This number is called the spacelike angle between the vectors and .
(ii) Central angle: Let and be spacelike vectors in that span a timelike vector subspace; then, we have ; hence, there is a unique real number such that . This number is called the central angle between the vectors and .
(iii) Lorentzian timelike angle: Let be spacelike vector and be timelike vector in . Then, there is a unique real number such that . This number is called the Lorentzian timelike angle between the vectors and .
The hyperbolic and Lorentzian unit spheres, respectively, are
and
We denote a surface
M in
by
Let
be the standard unit normal vector field on a surface
M defined by
, where,
. Then, the metric (first fundamental form)
I of a surface
M is defined by
where
,
. We define the second fundamental form
of
M by
where
,
. The Gaussian curvature
K and the mean curvature
H are
where
. A surface in the Minkowski 3-space
is called a spacelike (resp. timelike) surface if the induced metric on the surface is a positive (resp. negative) definite Riemannian metric. This is equivalent to saying that the normal vector on the spacelike (resp. timelike) surface is a timelike (resp. spacelike) vector [
1,
2,
3].
3. Spacelike Circular Surfaces
In this section, we first introduce spacelike circular surfaces in
. Then, we give some possessions of these surfaces and define the concept of the spacelike roller coaster surface as a special class of spacelike circular surfaces, given a timelike spherical curve
parameterized by its arc-length
s. Then, there is a unique Blaschke frame
. This yields
From now on, this paper assumes such a parametrization and indicates its differentiation with respect to
s with primes. Then, the Blaschke formulae is
where
is the spherical (geodesic) curvature function of
. Let
be a non-null space curve represented by
The four functions
,
, and
constitute a Lorentzian complete system of the curve
. Thus, for a positive number
, and by means of the solutions of the differential system (8), a spacelike circular surface
M can be defined as follows:
where
is called the spine curve, and
are called generating circles. In this work, we exclude circular surfaces with constant vector
e, whose geometric possessions are not so much interesting and to a certain extent are easier to explore.
It is clear that Equation (
8) offers a way for constructing spacelike circular surfaces with a given radius
through the equation
The timelike unit normal vector is
By a straightforward calculation, we obtain:
so,
Definition 2. Let M be a spacelike circular surface with the standard Equation (8). Then, at , the following holds: (1) M is called a spacelike canal (tubular) surface if the spine curve is orthogonal to the circular plane, that is, , and satisfy that (2) M is called a spacelike roller coaster (or tangent) surface if the spine curve is tangent to the circular plane, that is, , and satisfy that It is well known that lines are considered as the simplest examples of curves, and circles with a fixed radius give another simple example of curves. Ruled surfaces are characterized out by a family of lines and circular surfaces by a series of circles with a fixed radius. Ruled surfaces have striction curves, while circular surfaces have spine curves. Therefore, it is normal to study circular surfaces compared with the class of ruled surfaces. The following subsections give some geometrical possessions of the spacelike canal and the non-canal spacelike surfaces.
3.1. Striction Curves
In the Euclidean 3-space, the striction curves of the circular surfaces are defined by Izumiya et al. [
7]. We devised a new definition of striction curves, as follows: the curve
is the striction curve if and only if
satisfies
This condition is analogous to the condition on the striction curve of a ruled surface. Then, after simple computations, we obtain that
is a striction curve on the spacelike circular surface if and only if
Then, the striction points only occur when
From Equations (8) and (19), we have
According to Equations (15) and (19), any curve on the spacelike canal surface transverse to the generating circle satisfies the condition of striction curve, that is, . Therefore, the class of canal surfaces is an analogous class to the class of cylindrical surfaces. From the above analysis, the following conclusion can be reached.
Proposition 1. Any non-canal spacelike circular surface has one striction curve.
3.2. Curvature Lines and Singularities
Curvature lines and singularities are fundamental for aspects of circular surfaces and are addressed as follows: from Equations (10) and (12), it can be seen that all generating circles are curvature lines if and only if
We will now study this condition in detail: if
, then
M cannot be generated (in fact, we have imposed
). Therefore, if
, the surface
M is not regular. According to the assumption of
M being regular, we have
for all values of
. Thus, we have three cases:
Case (1) When , the tangent vector of the spine curve is equal to , that is, the spine curve is a fixed point. This means that the spacelike circular surface is a Lorentzian sphere with radius r, namely, .
Case (2) When , the spine curve is orthogonal to the spacelike circular plane, that is, is parallel to . Then, the spacelike circular surface becomes a spacelike canal surface with spacelike spine curve.
Case (3) When
, the tangent vector
is parallel to
. Hence, the tangent vector of the spine curve lies on the spacelike circle plane at each point of
M, namely,
. When
is constant, it follows that
where
is a constant vector. From Equations (8) and (22), it can be found that
This means that all the circle points lie on a Lorentzian sphere of radius with , and is its center point in .
Theorem 1. In the Minkowski 3-space , besides the general spacelike circular surfaces there are two families of spacelike circular surfaces whose generating circles are curvature lines. These two families are the spacelike roller coaster surfaces and the Lorentzian spheres with a radius smaller than that of the generating circles.
Singularities are fundamental for the possessions of circular surfaces and are investigated as follows: it is interesting to note that the singular points on a generating circle are at one-point generality. From Equations (7) and (17), we can show that
M has a singular point at
if and only if
which gives
Then, we have
, which yields
. Then, from the second equation in Equation (
24), we find
. Thus, we consider the following possible cases.
Case (a). Let ; then, we have . Thus, the singular point of M is at such that , which gives , and .
Case (b). If
, then one can easily see that
. Thus, the spacelike circular surface is a non-canal spacelike circular surface By using the definitions of hyperbolic cosine and sine functions, we obtain
Hence, we can say that the spacelike circular surface M has a singular point at such that , and .
3.3. Spacelike Canal (Tubular) Surfaces
In this subsection, we investigate and construct spacelike canal surface (
), whose parametric curves are curvature lines. Therefore, from Equations (11), (14), and (15), it follows that
. If we substitute this into the Equation (
6), we obtain
The curve that satisfies the condition found in Equation (
25) is a timelike great circle on
. For example, a timelike great circle can be expressed as
. The tangent vector can be found from
as
. Thus,
has the form
. Choosing integral with zero integration constants yields
Let us choose
. Then,
It is clear that
has a singular point at
(cusp), see
Figure 1. Hence, the spacelike canal surface
M with the spacelike spine curve
is given by
Clearly, M has a singular point at from the case(a) of singularity. For , with , and .
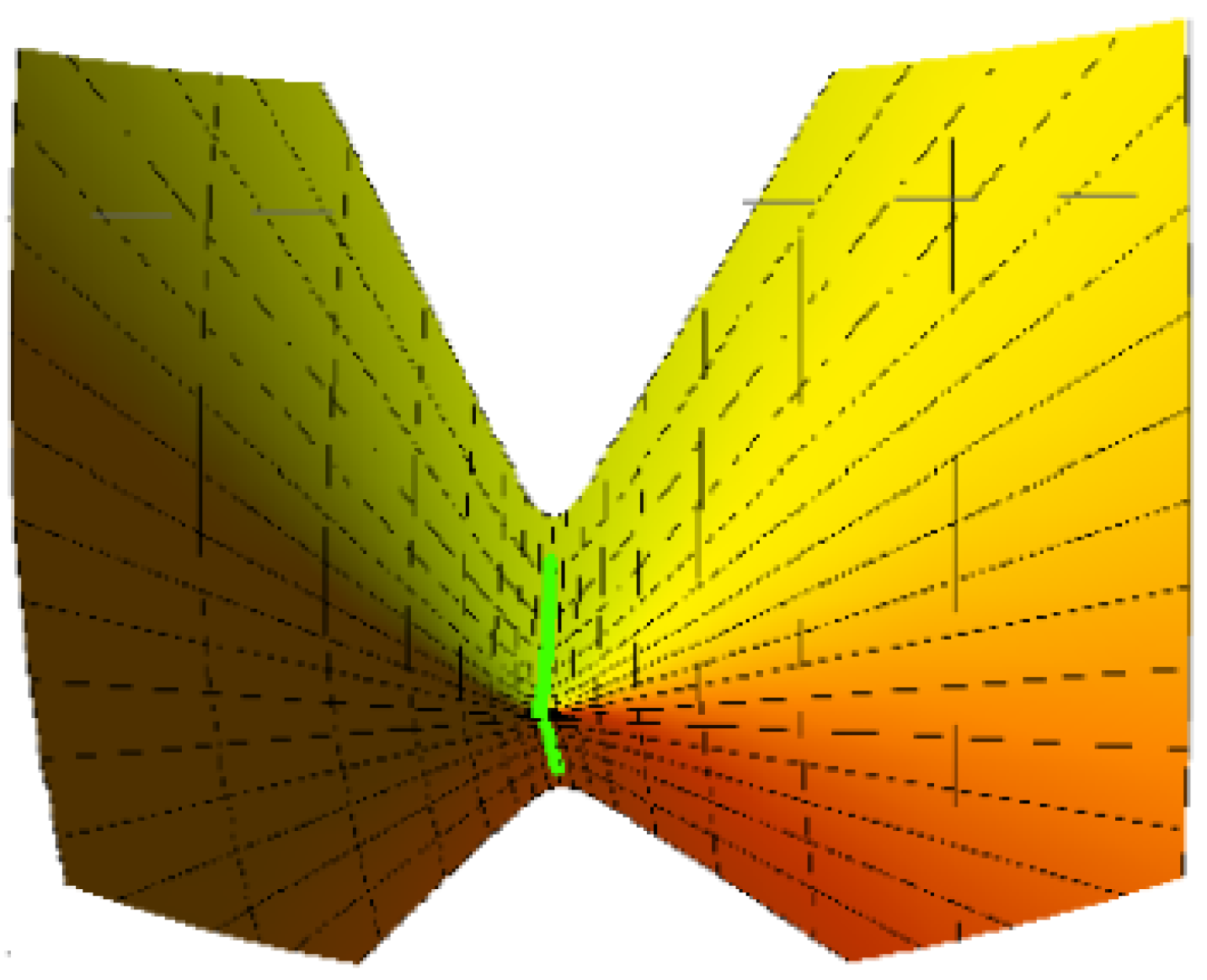
Example 1. A non-canal spacelike circular surface can be represented as: let as indicated in the Equation (8). Take , and . Then, Taking integral with zero integration constants yields One can easily see that has no singular points. According to the conditions of Case(b), we have , and the striction curve isThe spacelike circular surface M with the spine curve is given bywhich has different singularities that appear on the striction curve (green), see Figure 2. Now, we give parametric representation of a spacelike canal (tubular) surface with a spacelike spine curve. Let u be the arc-length parameter of α and , be its Serret–Frenet frame. Then, we have Then, the Serret–Frenet equations are written aswhere and are the natural curvature and torsion of the spine curve , respectively, It is interesting to note that as long as is orthogonal to the circle planes at each point of the spine curve, the canal surface can thus be parametrized as The partial derivatives and can be computed aswhere . The components of the first and second fundamental forms are The unit normal vector is By simple computations, we have Since every generating circle is a curvature line, the value of one principal curvature is The principle direction of points in the direction of the generating circle, and this curvature is constant along the generating circle. The other principal curvature is easy to obtain Corollary 1. The principal curvature of a spacelike canal surface is constant along each generating circle.
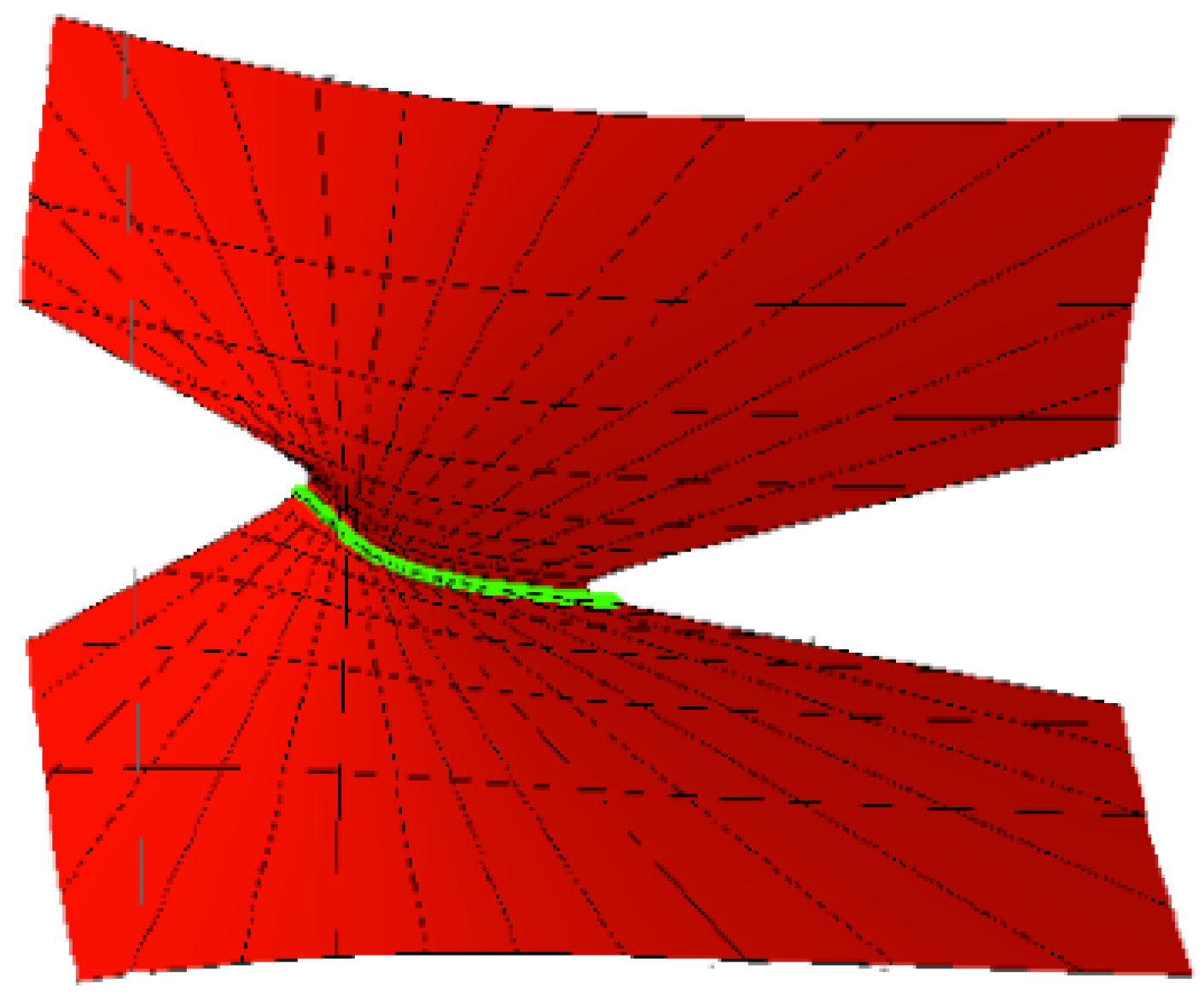
Example 2. In this example, we construct a spacelike canal surface family in which all of the surfaces share a spacelike circular helix represented aswhere , and . After simple computation, we have Thus, the spacelike canal surface family is given by If we take , and , then we immediately obtain a member of this family. It is clear that has no singularity. M has a singular point at , see Figure 3. 3.4. Spacelike Roller Coaster Surfaces
Spacelike roller coaster surfaces are defined to be those that the tangent vector of spine curve
lies in the spacelike circle plane at each point of
. This means that
, and
,
do not equal to zero simultaneously. Through this work, we will consider
, and
. In this case, we call this surface a spacelike roller coaster surface with timelike spine curve, that is,
. Therefore, we have
The Gaussian and mean curvatures, respectively, are:
Theorem 2. If a family of spacelike roller coaster surfaces has the same radius r, scalar function , and derivative , the Gaussian and the mean curvatures at corresponding points are the same. In addition, these values are independent of the geodesic curvature of the timelike spherical curve .
In order to discuss the possessions of roller coaster surface, the Serret–Frenet of the timelike spine curve
needs to be built. So, let
v denote the arc-length of the spine curve
and
,
be the moving Serret–Frenet frame along
. Then, we have
Then, the Serret–Frenet formulae read
where
and
are the natural curvature and torsion of the spine curve
, respectively, given by
From Equation (
44), it follows that if
(resp.
is a constant, the torsion of the spine curve vanishes. Thus, the spine curve is a timelike planar one.
Now, we investigate flat and minimal spacelike roller coaster surfaces. We know that the necessary condition for
M to be a flat surface is to satisfy the condition
. By using the first equation of Equation (
40), we obtain
Hence, for all
we have
From Equations (44) and (45), the expression of
in terms of the Serret–Frenet’s invariants is
Thus, in a neighborhood of every point on M with , we obtain that . Therefore, a spacelike roller coaster surface whose Gaussian curvature vanishes identically is a part of spacelike plane. In the same manner, we obtain that M is a spacelike minimal flat surface.
3.5. Examples
We now give some examples of spacelike roller coaster surfaces. They also serve to verify the correctness of the formulae derived above.
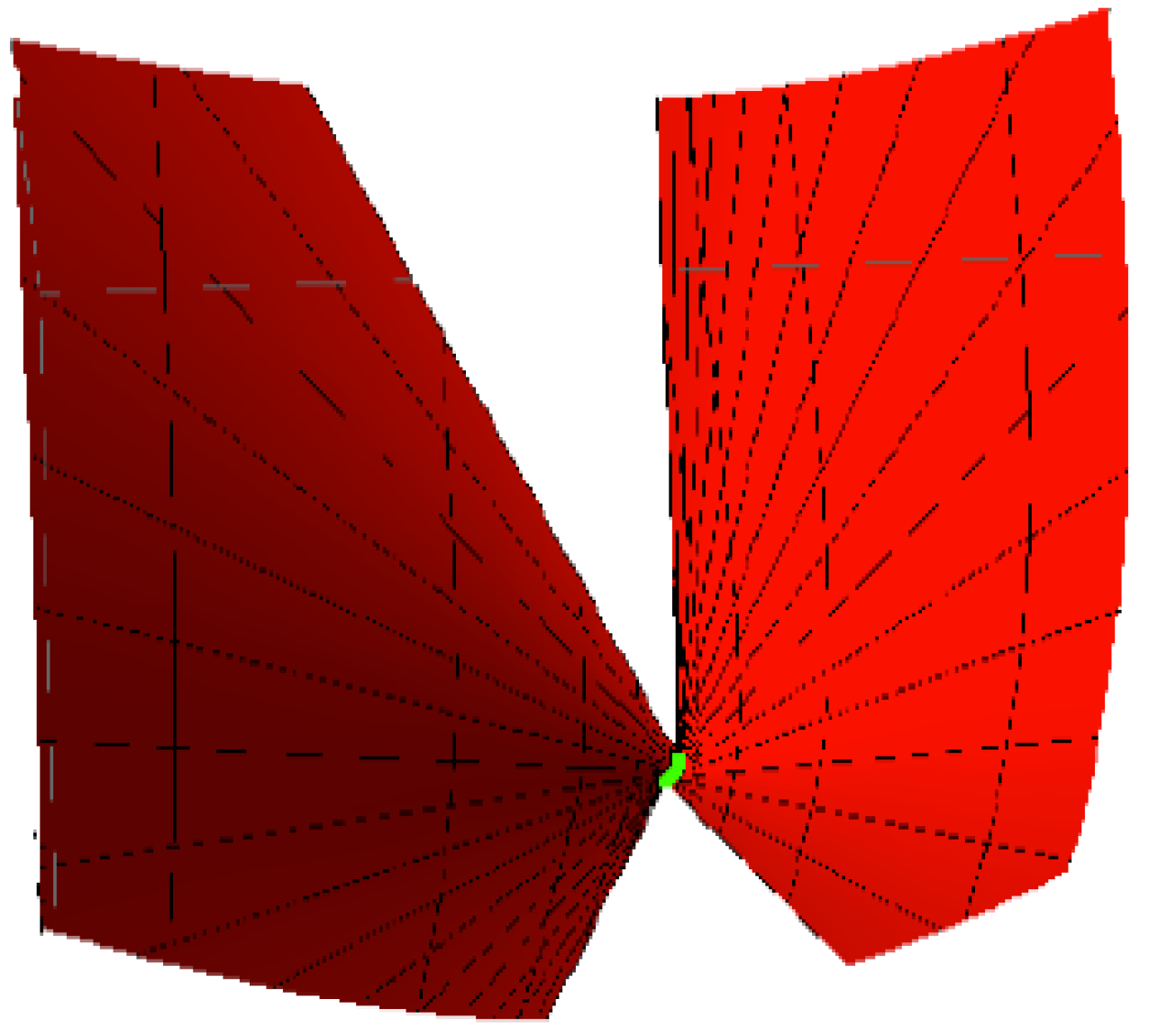
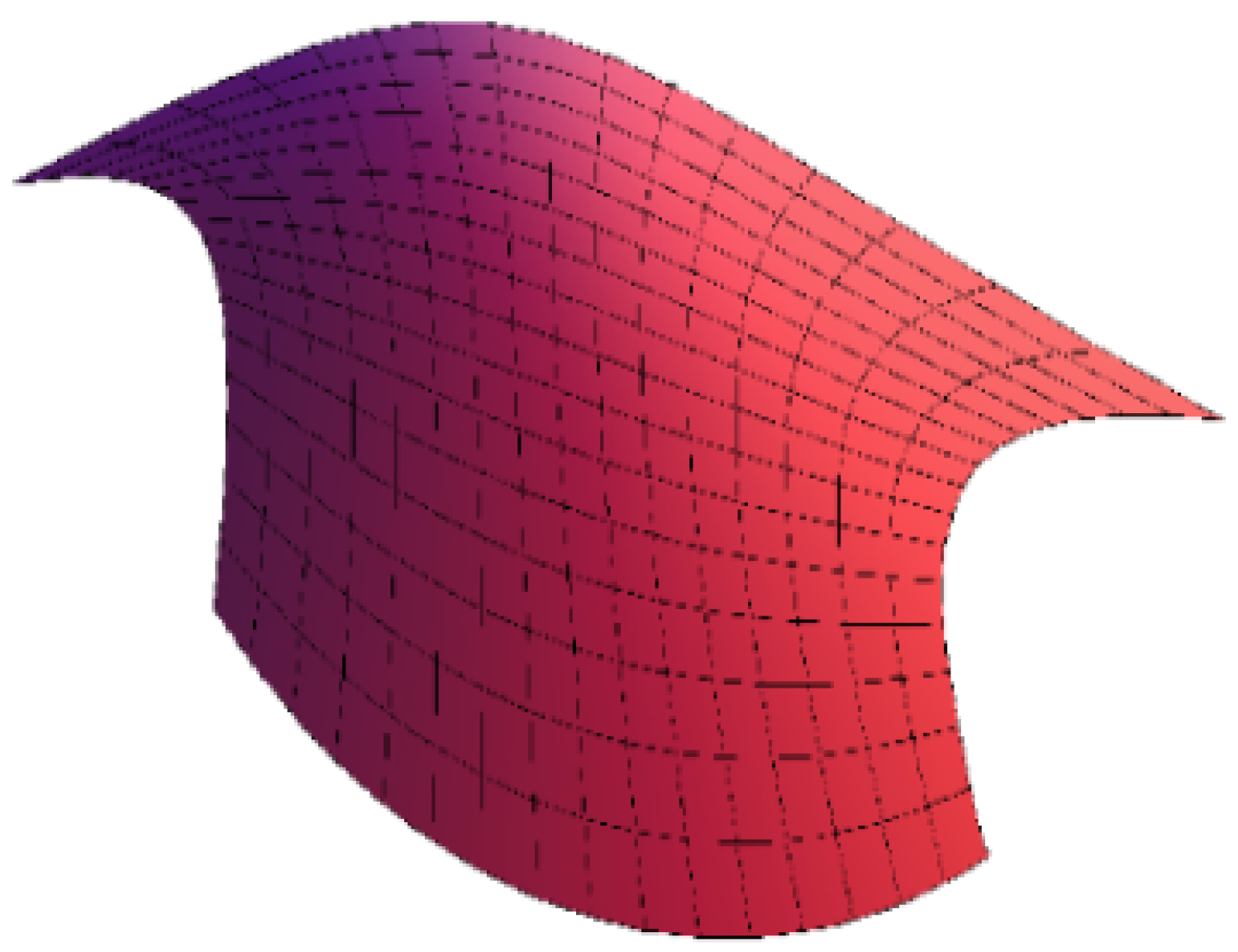
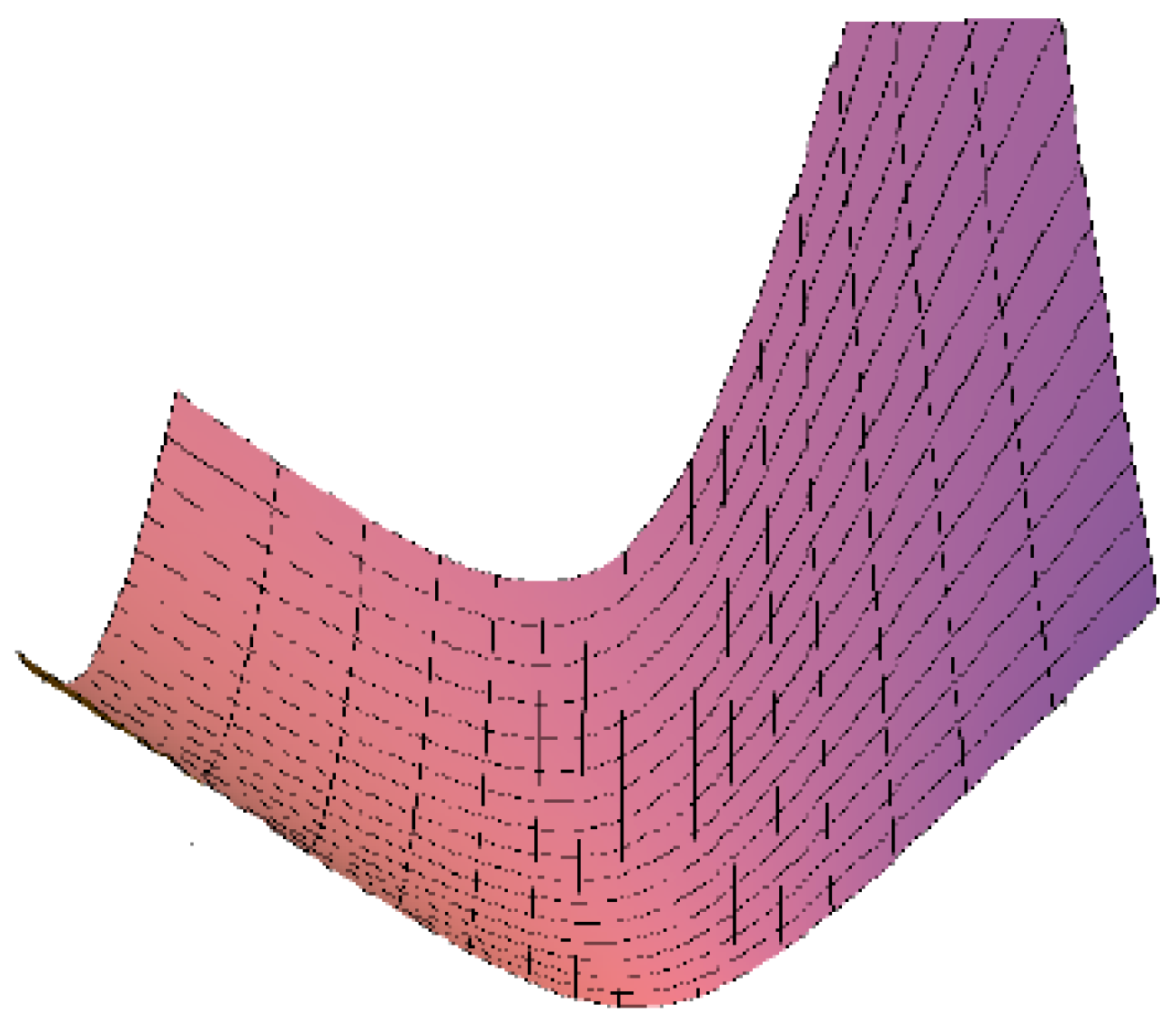
Example 3. Given the timelike circular helix: The Serret–Frenet frame along the curve is obtained asand , and it follows that . Thus, the spacelike roller coaster surfaces family is expressed as So, if we choose , for , and special values of ϑ and v, the graph of the surface is presented in Figure 4. Example 4. Suppose we are given a parametric timelike curve Simple computations giveand , and it follows that is a constant. Thus, the roller coaster spacelike surfaces family is expressed as So, for , , and there are special values of ϑ and v; the graph of the surface is presented in Figure 5. 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




