
Numerical Integration of Stiff Differential Systems Using Non-Fixed Step-Size Strategy




Abstract
:1. Introduction
- i
- is non-negative and non-decreasing in eachin,
- ii
- for, and
- iii
- .
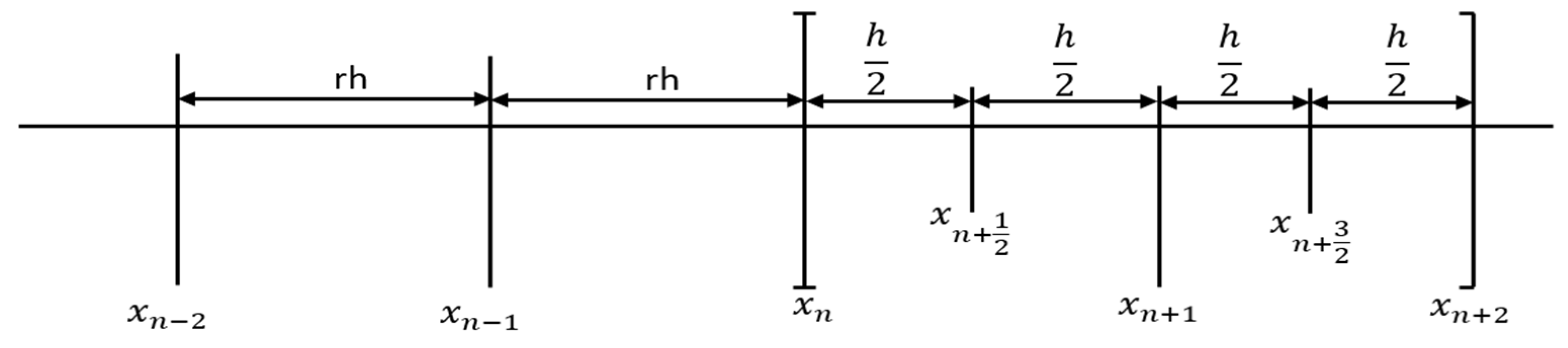
2. Derivation of the NFSSA
3. Validation of Properties of the NFSSA
3.1. Order and Error Constant
3.2. Zero-Stability
3.3. Consistency
3.4. Convergence
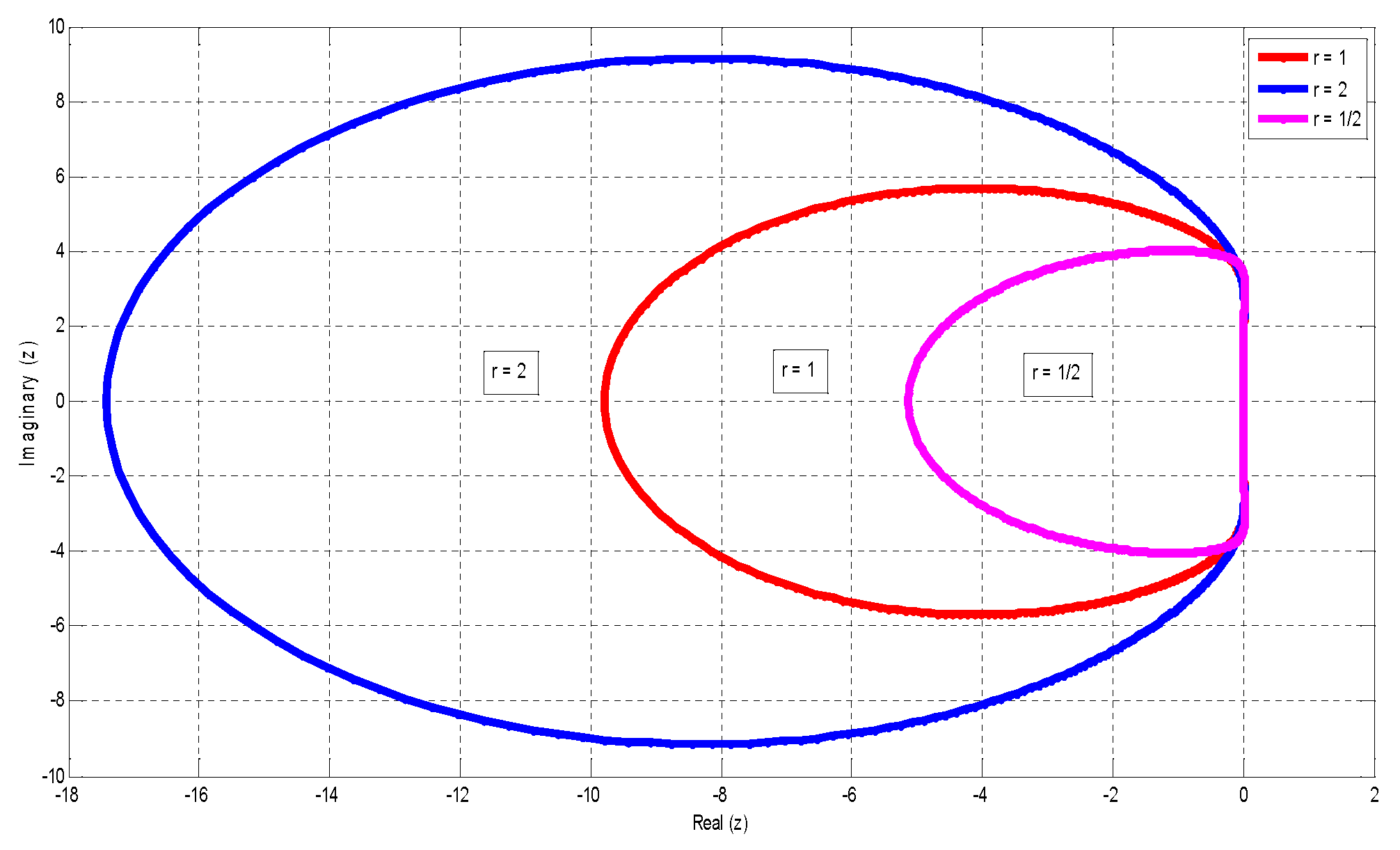
3.5. Regions of Absolute Stability
4. Pseudocode and Step-Size Selection for Implementation of the NFSSA
4.1. Pseudocode
4.2. Step-Size Selection
5. Numerical Examples
5.1. Problem 1
5.2. Problem 2
5.3. Problem 3
5.4. Problem 4
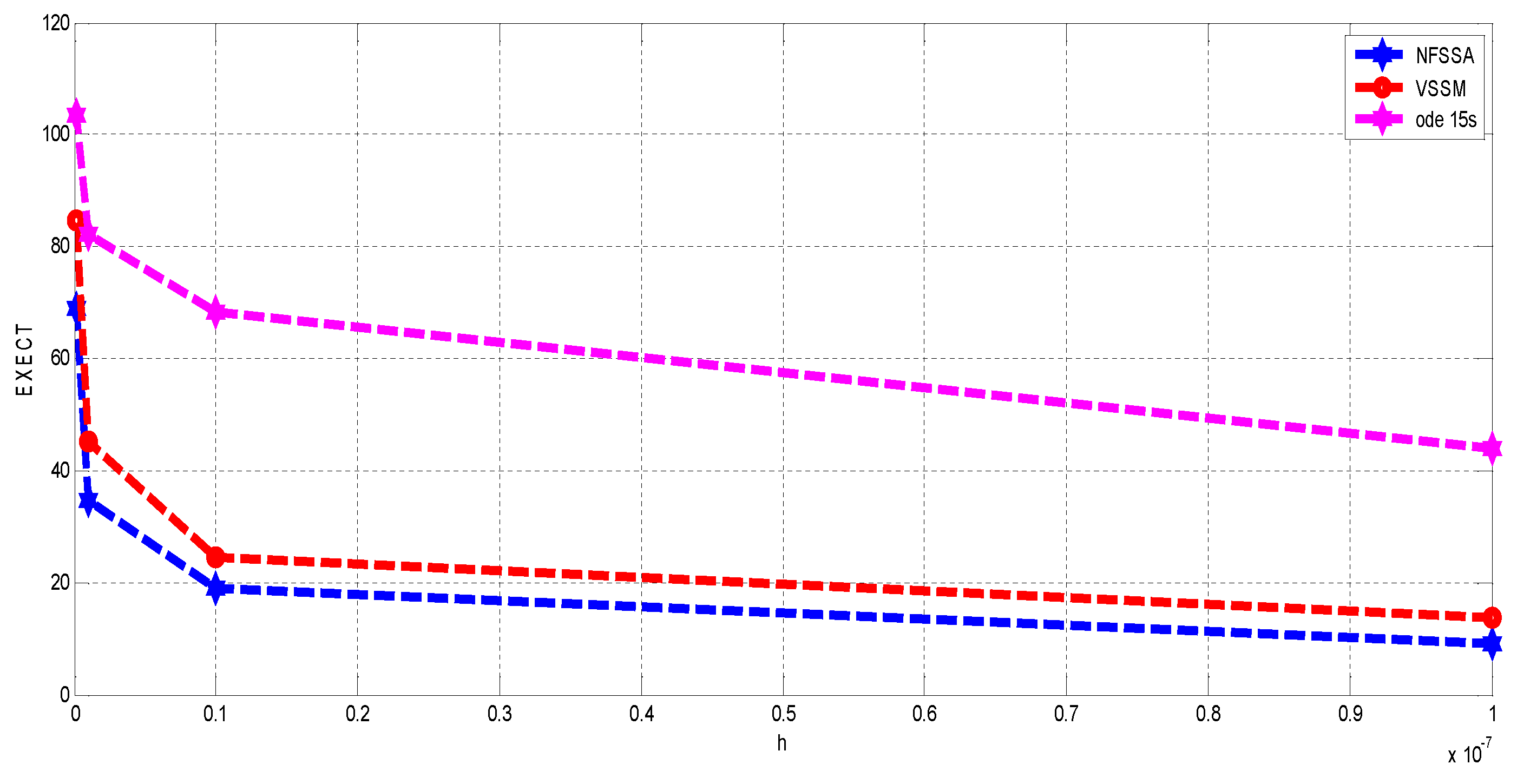
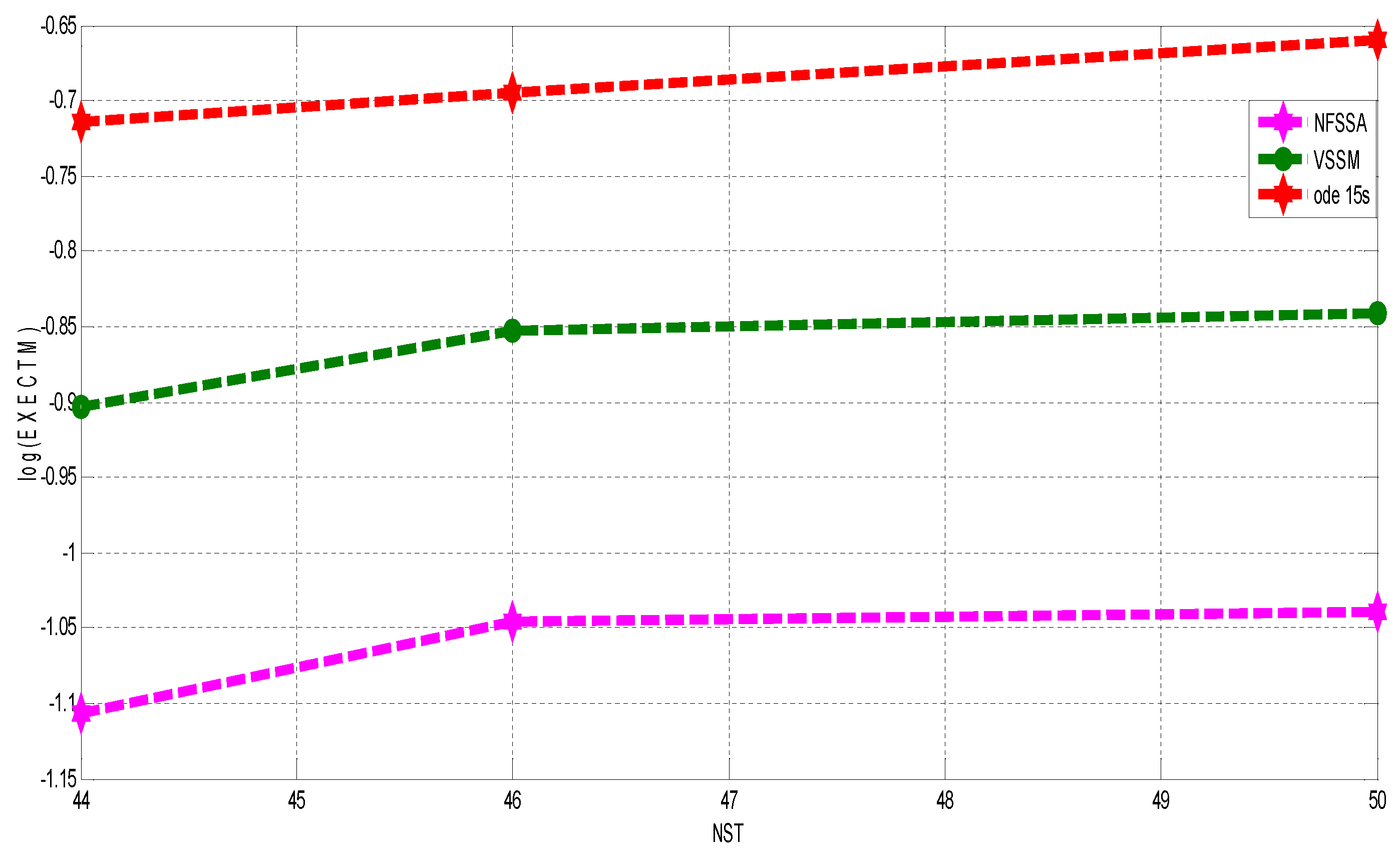
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| h | Step size |
| NST | Number of steps taken |
| FNE | Number of function evaluations |
| FNC | Total number of function calls |
| FLS | Number of failure (rejected) steps |
| EXECTM | Execution time (in seconds) |
| ABERR | Absolute error |
| MAXERR | Maximum error |
| APPSOL | Approximate solution |
| VSSM | Order 6 variable step-size method developed by [1] |
| HSDBBDF | Order 7 hybrid second derivative block backward differentiation formula developed by [11] |
| SDM | Order 11 second derivative method developed by [50] |
| ode 15s | MATLAB inbuilt stiff solver |
| NFSSA | Newly derived non-fixed step-size algorithm |
References
- Ramos, H.; Sing, G. A note on variable step size formulation of a Simpson’s-type second derivative blocks method for solving stiff systems. Appl. Math. Lett. 2017, 64, 101–107. [Google Scholar] [CrossRef]
- Wend, V.V. Uniqueness of solution of ordinary differential equations. Am. Mon. 1967, 74, 27–33. [Google Scholar]
- Aiken, R. Stiff Computation; Oxford University Press: New York, NY, USA, 1985. [Google Scholar]
- Kin, J.; Cho, S.Y. Computational accuracy and efficiency of the time-splitting method in solving atmospheric transport/chemistry equations. Atmos. Environ. 1997, 31, 2215–2224. [Google Scholar]
- Curtiss, C.F.; Hirschfelder, J.O. Integration of stiff equations. Proc. Natl. Acad. Sci. USA 1952, 38, 235–243. [Google Scholar] [CrossRef]
- Spijker, M.N. Stiffness in numerical initial value problems. J. Comput. Appl. Math. 1996, 72, 393–406. [Google Scholar] [CrossRef]
- Hairer, E.; Wanner, G. Solving Ordinary Differential Equations II: Stiff Differential-Algebraic Problems, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Sunday, J.; Kumleng, G.M.; Kamoh, N.M.; Kwanamu, J.A.; Skwame, Y.; Sarjiyus, O. Implicit four-point hybrid block integrator for the simulations of stiff models. J. Nig. Soc. Phys. Sci. 2022, 4, 287–296. [Google Scholar] [CrossRef]
- Shokri, A. An explicit trigonometrically fitted ten-step method with phase-lag of order infinity for the numerical solution of radial Schrodinger equation. Appl. Comput. Math. 2015, 14, 63–74. [Google Scholar]
- Shokri, A.; Saadat, H. P-stability, TF and VSDPL technique in Obrechkoff methods for the numerical solution of the Schrödinger equation. Bull. Iran. Math. Soc. 2016, 42, 687–706. [Google Scholar]
- Akinfenwa, O.A.; Abdulganiy, R.I.; Akinnukawe, B.I.; Okunuga, S.A. Seventh order hybrid block method for solution of first order stiff systems of initial value problems. J. Egypt. Math. Soc. 2020, 28, 34. [Google Scholar] [CrossRef]
- Sunday, J.; Odekunle, M.R.; Adesanya, A.O.; James, A.A. Extended block integrator for first-order stiff and oscillatory differential equations. Am. J. Comput. Appl. Math. 2013, 3, 283–290. [Google Scholar]
- Sunday, J. Optimized two-step second derivative methods for the solutions of stiff systems. J. Phys. Commun. 2022, 6, 055016. [Google Scholar] [CrossRef]
- Hashim, I.; Chowdhury, M.S.H.; Hosen, A. Solving linear and nonlinear stiff system of ordinary differential equations by multistage Adomian decomposition method. In Proceedings of the Third International Conference on Advances in Applied Science and Environmental Technology, Bangkok, Thailand, 28–29 December 2015. [Google Scholar]
- Amat, S.; Legaz, M.J.; Ruiz-Alvarez, J. On a Variational method for stiff differential equations arising from chemical kinetics. Mathematics 2019, 7, 459. [Google Scholar] [CrossRef]
- Shokri, A. The Symmetric P-Stable Hybrid Obrenchkoff Methods for the Numerical Solution of Second Order IVPs. TWMS J. Pure Appl. Math. 2012, 5, 28–35. [Google Scholar]
- Pankov, P.S.; Zheentaeva, Z.K.; Shirinov, T. Asymptotic reduction of solution space dimension for dynamical systems. TWMS J. Pure Appl. Math. 2021, 12, 243–253. [Google Scholar]
- Iskenderov, N.S.; Allahverdiyeva, S.I. An inverse boundary value problem for the boussineq-love equation with nonlocal integral condition. TWMS J. Pure Appl. Math. 2020, 11, 226–237. [Google Scholar]
- Qalandarov, A.A.; Khaldjigitov, A.A. Mathematical and numerical modeling of the coupled dynamic thermoelastic problems for isotropic bodies. TWMS J. Pure Appl. Math. 2020, 11, 119–126. [Google Scholar]
- Faydaoglu, S.; Ozis, T. Periodic solutions for certain non-smooth oscillators with high nonlinearities. Appl. Comput. Math. 2021, 20, 366–380. [Google Scholar]
- Adiguzel, R.S.; Aksoy, U.; Karapinar, E.; Erhan, I.M. On the solutions of fractional differential equations via Geraghty type hybrid contractions. Appl. Comput. Math. 2021, 20, 313–333. [Google Scholar]
- Ashyralyev, A.; Agirseven, D.; Agarwal, R.P. Stability estimates for delay parabolic differential and difference equations. Appl. Comput. Math. 2020, 19, 175–204. [Google Scholar]
- Ibrahim, Z.B.; Othman, K.I.; Suleiman, M. Variable step block backward differentiation formula for solving first order stiff ordinary differential equations. In Proceedings of the World Congress on Engineering, London, UK, 2–4 July 2007. [Google Scholar]
- Yashkun, U.; Aziz, N.H.A. A modified 3-point Adams block method of the variable step size strategy for solving neural delay differential equations. Sukkur IBA J. Comput. Math. Sci. 2019, 3, 37–45. [Google Scholar]
- Zawawi, I.S.M.; Ibrahim, Z.B.; Othman, K.I. Variable step block backward differentiation formula with independent parameter for solving stiff ordinary differential equations. J. Phys. Conf. Ser. 2021, 1988, 012031. [Google Scholar] [CrossRef]
- Abasi, N.; Suleiman, M.; Fudziah, I.; Ibrahim, Z.B.; Musa, H.; Abbasi, N. A new formula of variable step 3-point block backward differentiation formula method for solving stiff ordinary differential equations. J. Pure Appl. Math. Adv. Appl. 2014, 12, 49–76. [Google Scholar]
- Oghonyon, J.G.; Ogunniyi, P.O.; Ogbu, I.F. A computational strategy of variable step, variable order for solving stiff systems of ODEs. Int. J. Anal. Appl. 2021, 19, 929–948. [Google Scholar] [CrossRef]
- Rasedee, A.F.N.; Suleiman, M.; Ibrahim, Z.B. Solving non-stiff higher order ODEs using variable order step size backward difference directly. Math. Probl. Eng. 2014, 565137, 565137. [Google Scholar]
- Abasi, N.; Suleiman, M.; Ibrahim, Z.B.; Musa, H.; Rabiei, F. Variable step 2-point block backward differentiation formula for index-1 differential algebraic equations. Sci. Asia 2014, 40, 375–378. [Google Scholar] [CrossRef]
- Shampine, L.F. Variable order Adams codes. Comput. Math. Appl. 2002, 44, 749–761. [Google Scholar] [CrossRef]
- Rasedee, A.F.N.; Sathar, M.H.A.; Hamzah, S.R.; Ishak, N.; Wong, T.J.; Koo, L.F.; Ibrahim, S.N.I. Two-point block variable order step size multistep method for solving higher order ordinary differential equations directly. J. King Saud Univ. Sci. 2021, 33, 101376. [Google Scholar] [CrossRef]
- Mehrkanoon, S. A direct variable step block multistep method for solving general third order ordinary differential equations. Numer. Algorithms 2011, 57, 53–66. [Google Scholar] [CrossRef]
- Soomro, H.; Zainuddin, N.; Daud, H.; Sunday, J.; Jamaludin, N.; Abdullah, A.; Apriyanto, M.; Kadir, E.A. Variable step block hybrid method for stiff chemical kinetics problems. Appl. Sci. 2022, 12, 4484. [Google Scholar] [CrossRef]
- Han, Q. Variable step size Adams methods for BSDEs. J. Math. 2021, 2021, 9799627. [Google Scholar] [CrossRef]
- Ibrahim, Z.B.; Zainuddin, N.; Othman, K.I.; Suleiman, M.; Zawawi, I.S.M. Variable order block method for solving second order ordinary differential equations. Sains Malays. 2019, 48, 1761–1769. [Google Scholar] [CrossRef]
- Holsapple, R.; Iyer, R.; Doman, D. Variable step size selection methods for implicit integration schemes for ordinary differential equations. Int. J. Numer. Anal. Model. 2007, 4, 210–240. [Google Scholar]
- Oghonyon, J.G.; Okunuga, S.A.; Bishop, S.A. A variable step size block predictor-corrector method for ordinary differential equations. Asian J. Appl. Sci. 2017, 10, 96–101. [Google Scholar] [CrossRef]
- Sunday, J.; Shokri, A.; Marian, D. Variable step hybrid block method for the approximation of Kepler problem. Fractal Fract. 2022, 6, 343. [Google Scholar] [CrossRef]
- Iserles, A. A First Course in the Numerical Analysis of Differential Equations; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Krogh, F.T. Algorithms for changing the step size. SIAM J. Num. Anal. 1973, 10, 949–965. [Google Scholar] [CrossRef]
- Krogh, F.T. Changing step size in the integration of differential equations using modified divided differences. In Proceedings of the Conference on the Numerical Solution of Ordinary Differential Equations, Austin, TX, USA, 20 October 1972; Bettis, D.G., Ed.; Springer: Berlin/Heidelberg, Germany, 1974; pp. 22–71. [Google Scholar] [CrossRef]
- Fatunla, S.O. Numerical integrators for stiff and highly oscillatory differential equations. Math Comput. 1980, 34, 373–390. [Google Scholar] [CrossRef]
- Dahlquist, G.G. A special stability problem for linear multistep methods. BIT Numer. Math. 1963, 3, 27–43. [Google Scholar] [CrossRef]
- Lambert, J.D. Computational Methods in Ordinary Differential Equations; John Wiley & Sons, Inc.: New York, NY, USA, 1973. [Google Scholar]
- Calvo, M.; Vigo-Aguiar, J. A note on the step size selection in Adams multistep methods. Numer. Algorithms 2001, 27, 359–366. [Google Scholar] [CrossRef]
- Arevalo, C.; Soderlind, G.; Hadjimichael, Y.; Fekete, I. Local error estimation and step size control in adaptative linear multistep methods. Numer. Algorithms 2021, 86, 537–563. [Google Scholar] [CrossRef]
- Kizilkan, G.C.; Aydin, K. Step size strategies for the numerical integration of systems of differential equations. J. Comput. Appl. Math. 2012, 236, 3805–3816. [Google Scholar] [CrossRef]
- Butcher, J.C.; Hojjati, G. Second derivative methods with Runge-Kutta stability. Numer. Algorithms 2005, 40, 415–429. [Google Scholar] [CrossRef]
- Vigo-Aguiar, J.; Ramos, H. A family of A-stable Runge-Kutta collocation methods of higher order for initial value problems. IMA J. Numer. Anal. 2007, 27, 798–817. [Google Scholar] [CrossRef]
- Yakubu, D.G.; Markus, S. Second derivative of high-order accuracy methods for the numerical integration of stiff initial value problems. Afr. Mat. 2016, 27, 963–977. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step-Size | Formulae |
|---|---|
| Ratio | |
| Step-Size Ratio | Predictor Formulae |
|---|---|
| Step-Size Ratio | Roots |
|---|---|
| Step-Size Ratio | Stability Interval |
|---|---|
| hinitial | TOL | Method | MAXERR (y1) | MAXERR (y2) | MAXERR (y3) | NST | FNE | FLS | EXECT |
|---|---|---|---|---|---|---|---|---|---|
| 10−7 | 10−10 | NFSSA | 4.1983 × 10−19 | 3.1041 × 10−23 | 5.0013 × 10−19 | 3902 | 7110 | 00 | 9.05 |
| VSSM | 4.4408 × 10−16 | 3.3881 × 10−21 | 5.5511 × 10−17 | 3730 | 14,920 | 00 | 13.88 | ||
| ode 15s | 7.7561 × 10−9 | 5.4664 × 10−12 | 8.2009 × 10−10 | 2006 | 56,090 | 00 | 43.98 | ||
| 10−8 | 10−11 | NFSSA | 6.3923 × 10−19 | 1.1680 × 10−23 | 3.0361 × 10−19 | 6960 | 16,780 | 00 | 19.12 |
| VSSM | 8.8817 × 10−16 | 1.8634 × 10−20 | 4.9960 × 10−16 | 6626 | 26,504 | 00 | 24.46 | ||
| ode 15s | 9.5637 × 10−9 | 7.9259 × 10−12 | 8.9771 × 10−10 | 4344 | 60,020 | 00 | 68.46 | ||
| 10−9 | 10−12 | NFSSA | 2.5256 × 10−19 | 3.7445 × 10−22 | 1.0927 × 10−18 | 12,002 | 28,080 | 00 | 34.81 |
| VSSM | 3.2196 × 10−15 | 3.2187 × 10−20 | 2.7755 × 10−15 | 11,766 | 47,064 | 00 | 45.10 | ||
| ode 15s | 6.0929 × 10−9 | 4.3587 × 10−12 | 4.7460 × 10−10 | 7608 | 64,030 | 00 | 82.22 | ||
| 10−10 | NFSSA | 6.1523 × 10−18 | 4.1914 × 10−22 | 9.2440 × 10−17 | 21,228 | 56,024 | 00 | 69.02 | |
| VSSM | 4.3298 × 10−15 | 2.3716 × 10−20 | 8.3266 × 10−16 | 20,916 | 83,664 | 00 | 84.63 | ||
| ode 15s | 7.2701 × 10−9 | 6.2401 × 10−12 | 6.4396 × 10−10 | 15,018 | 72,670 | 00 | 103.47 |
| X | yi | SDM | ode 15s | HSDBBDF | NFSSA |
|---|---|---|---|---|---|
| 5 | y1 | 1.9196 × 10−02 | 5.4044 × 10−12 | 1.0123 × 10−17 | 3.0145 × 10−19 |
| y2 | 3.1501 × 10−2 | 7.4701 × 10−8 | 3.3881 × 10−21 | 5.5511 × 10−17 | |
| 40 | y1 | 7.9295 × 10−10 | 1.9841 × 10−13 | 5.8776 × 10−18 | 7.7121 × 10−21 |
| y2 | 9.7003 × 10−6 | 3.9544 × 10−9 | 7.8381 × 10−10 | 5.2001 × 10−13 | |
| 70 | y1 | 1.8759 × 10−13 | 2.2934 × 10−14 | 4.0276 × 10−18 | 4.1291 × 10−21 |
| y2 | 9.1528 × 10−8 | 7.0561 × 10−10 | 5.3701 × 10−10 | 3.9866 × 10−13 | |
| 100 | y1 | 1.7835 × 10−18 | 6.4358 × 10−16 | 5.3649 × 10−19 | 1.9087 × 10−21 |
| y2 | 4.4647 × 10−10 | 3.0223 × 10−10 | 7.1532 × 10−11 | 1.2781 × 10−13 |
| NST | Method | ABERR (y1) | ABERR (y2) | FNE | FLS | EXECTM |
|---|---|---|---|---|---|---|
| 44 | NFSSA | 6.4244 × 10−15 | 8.1479 × 10−14 | 156 | 00 | 0.0781 |
| VSSM | 3.3229 × 10−11 | 7.5785 × 10−11 | 176 | 00 | 0.1248 | |
| ode 15s | 2.2775 × 10−9 | 5.9313 × 10−9 | 198 | 00 | 0.1934 | |
| 46 | NFSSA | 7.1241 × 10−14 | 9.7146 × 10−14 | 164 | 00 | 0.0899 |
| VSSM | 5.7434 × 10−11 | 8.4486 × 10−10 | 184 | 00 | 0.1404 | |
| ode 15s | 4.0301 × 10−9 | 8.3121 × 10−9 | 208 | 00 | 0.2018 | |
| 50 | NFSSA | 4.6218 × 10−12 | 5.0121 × 10−12 | 180 | 00 | 0.0914 |
| VSSM | 2.5632 × 10−10 | 3.9818 × 10−10 | 200 | 00 | 0.1440 | |
| ode 15s | 7.1131 × 10−9 | 1.5736 × 10−8 | 228 | 00 | 0.2186 |
| X | yi | APPSOL Using NFSSA | APPSOL Using ode 15s |
|---|---|---|---|
| 1 | y1 | −1.8650950986 | −1.8650950571 |
| y2 | 0.7524845366 | 0.7524845299 | |
| 5 | y1 | 1.8985234725 | 1.8985234421 |
| y2 | −0.7289532611 | −0.7289532451 | |
| 10 | y1 | 1.7865365303 | 1.7865365103 |
| y2 | −0.8156276699 | −0.8156276438 | |
| 20 | y1 | 1.5075643350 | 1.5075643177 |
| y2 | −1.1911230102 | −1.1911230003 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sunday, J.; Shokri, A.; Kwanamu, J.A.; Nonlaopon, K. Numerical Integration of Stiff Differential Systems Using Non-Fixed Step-Size Strategy. Symmetry 2022, 14, 1575. https://doi.org/10.3390/sym14081575
Sunday J, Shokri A, Kwanamu JA, Nonlaopon K. Numerical Integration of Stiff Differential Systems Using Non-Fixed Step-Size Strategy. Symmetry. 2022; 14(8):1575. https://doi.org/10.3390/sym14081575
Chicago/Turabian StyleSunday, Joshua, Ali Shokri, Joshua Amawa Kwanamu, and Kamsing Nonlaopon. 2022. "Numerical Integration of Stiff Differential Systems Using Non-Fixed Step-Size Strategy" Symmetry 14, no. 8: 1575. https://doi.org/10.3390/sym14081575