


Reduction in Water Erosion and Soil Loss on Steep Land Managed by Controlled Traffic Farming
 , , , , ,
, , , , ,
Abstract
:1. Introduction
2. Materials and Methods
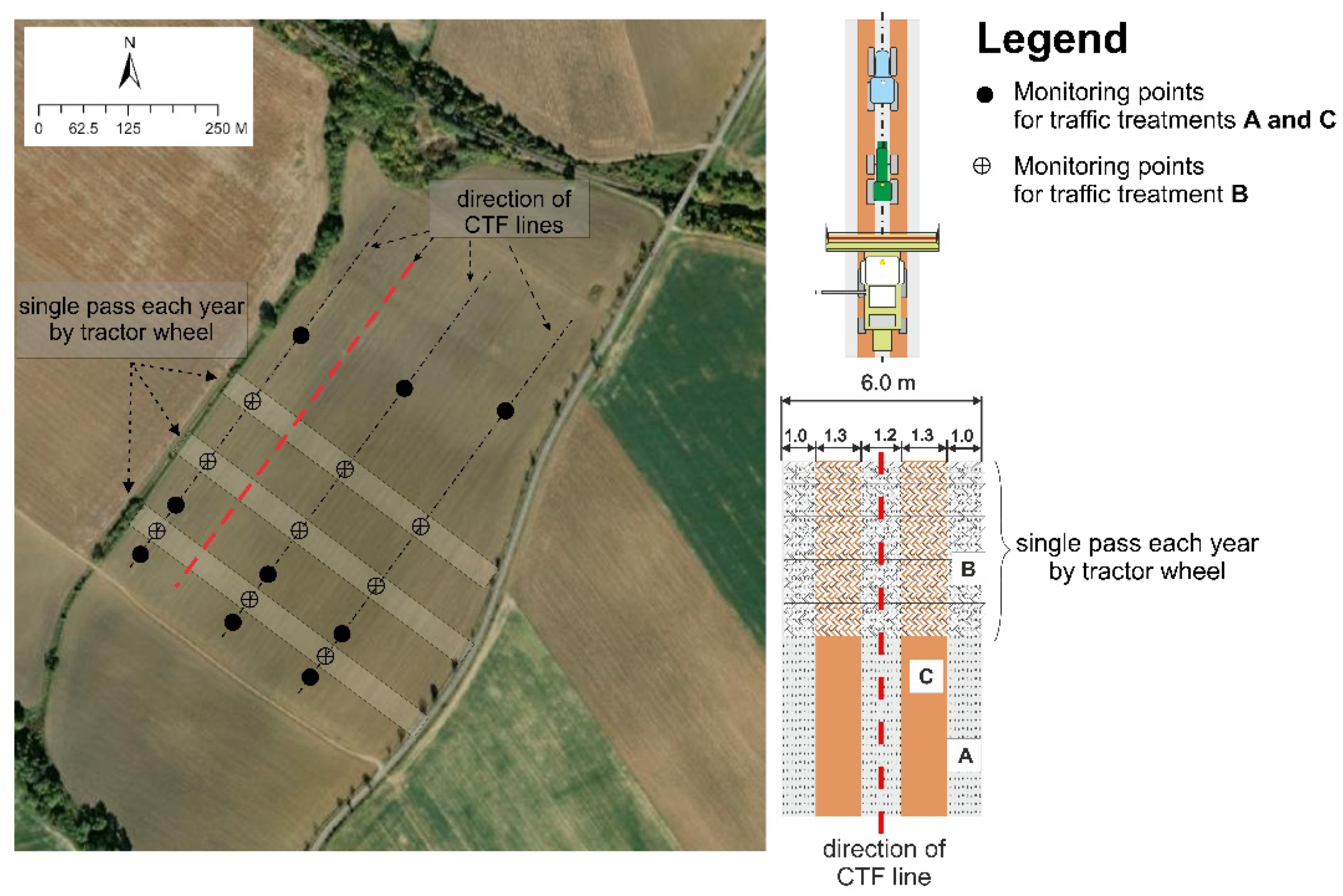
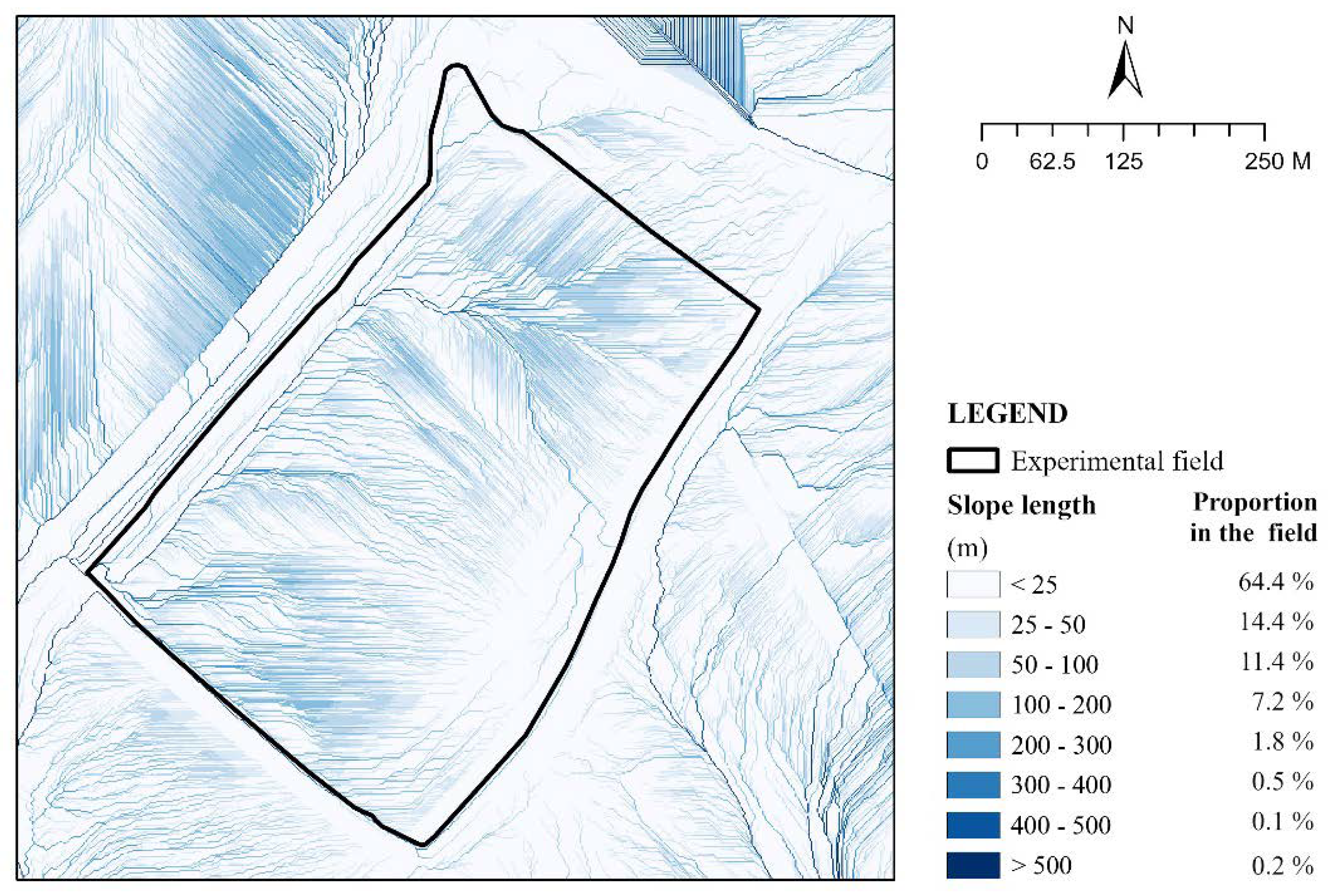
2.1. Experimental Field Characteristics
2.2. Field Measurements, Calculations, and Modelling
2.2.1. Soil Erosion Model
- E is the soil loss (t ha−1);
- R is the rainfall erosivity (MJ mm ha–1);
- K is the inherent erodibility of the soil (t ha−1 h ha–1 MJ–1 mm–1);
- LS is a dimensionless topographic factor based on slope length and steepness (-);
- C is a dimensionless factor representing vegetative cover (-);
- P is a dimensionless conservation support practice factor (-).
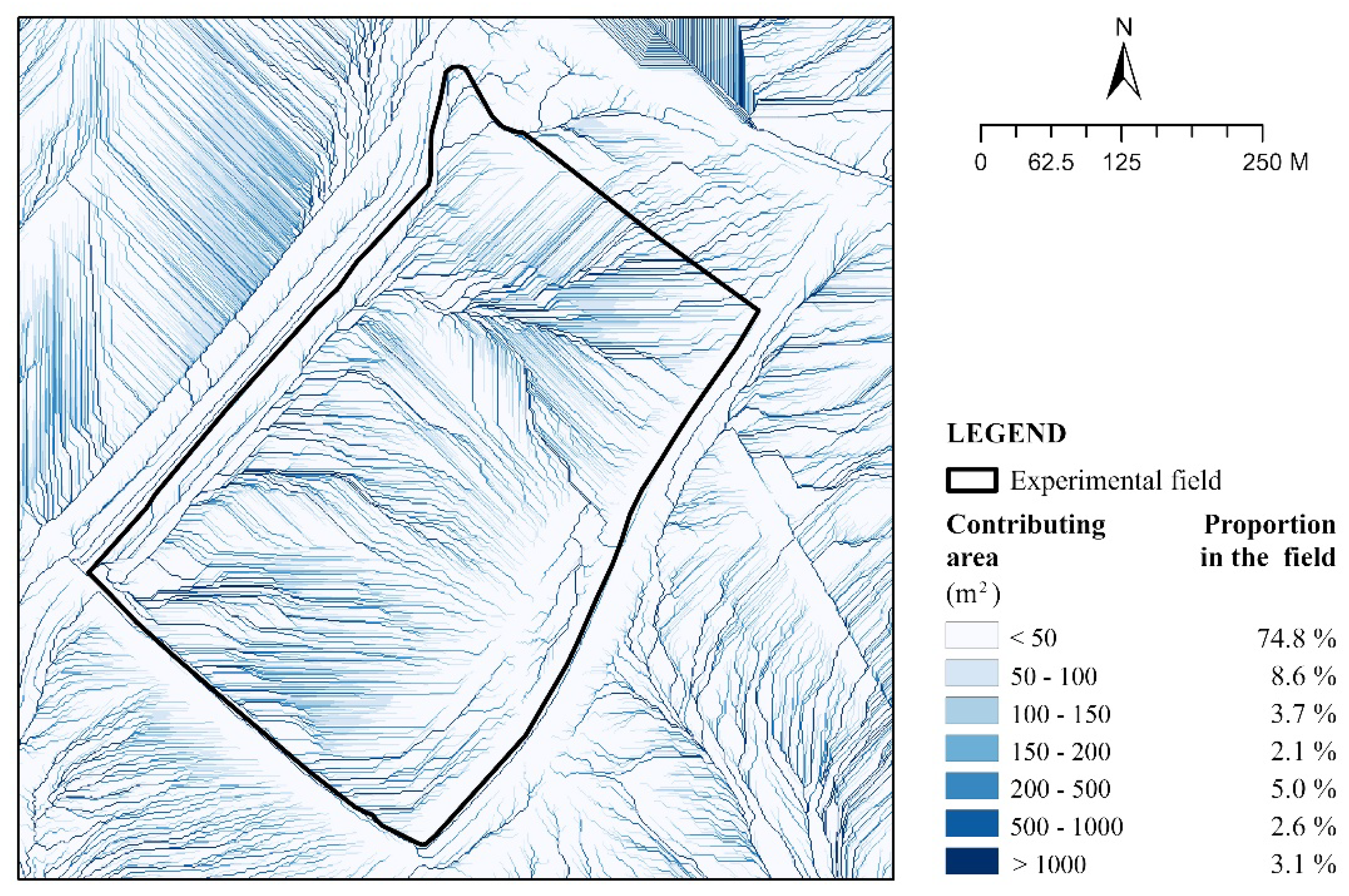
- A is the upslope contributing area per width unit (m2 m−1);
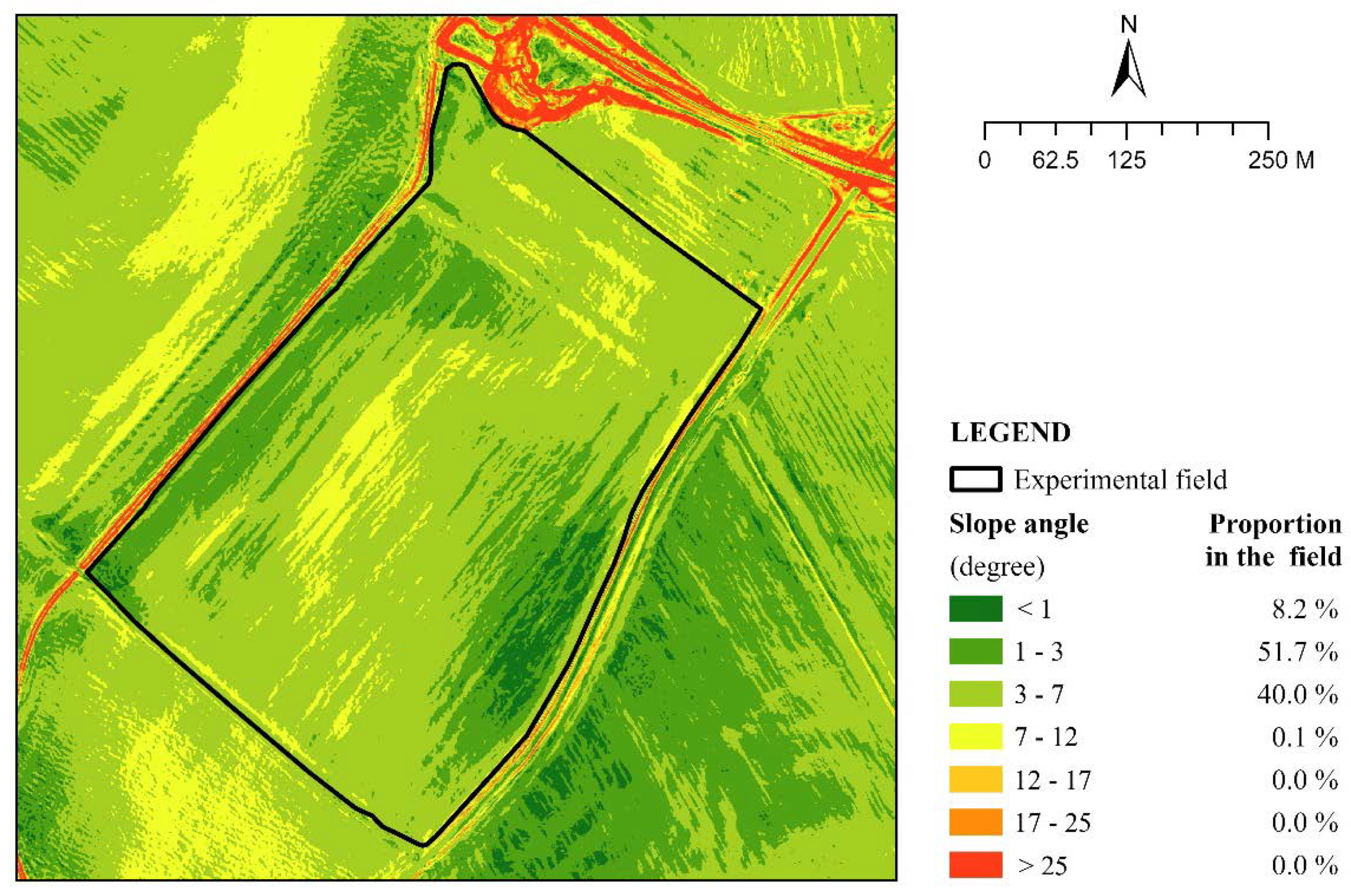
- Β is the slope angle (°);
- m and n are constants that depend on the type of flow and the soil parameters (-).
- Digital Terrain Model 5.0 (DTM 5.0)—year 2018 (having a spatial resolution of 1 m), established in 2017 by the Geodesy, Cartography and Cadastre Authority of the Slovak Republic (ÚGKK SR) [33]; the output data from the airborne laser scanning (ALS) were used; they are characterised by the scanning density of 33 points per m2 and the absolute vertical accuracy of the point cloud of 0.03 m; the DTM 5.0, as a raster model having a spatial resolution of 1 × 1 m, was built up using the inverse distance weighting (IDW) interpolation method.
- The flow direction (as an input raster for calculating the slope length and contributing area) was derived by the D8 algorithm [34].
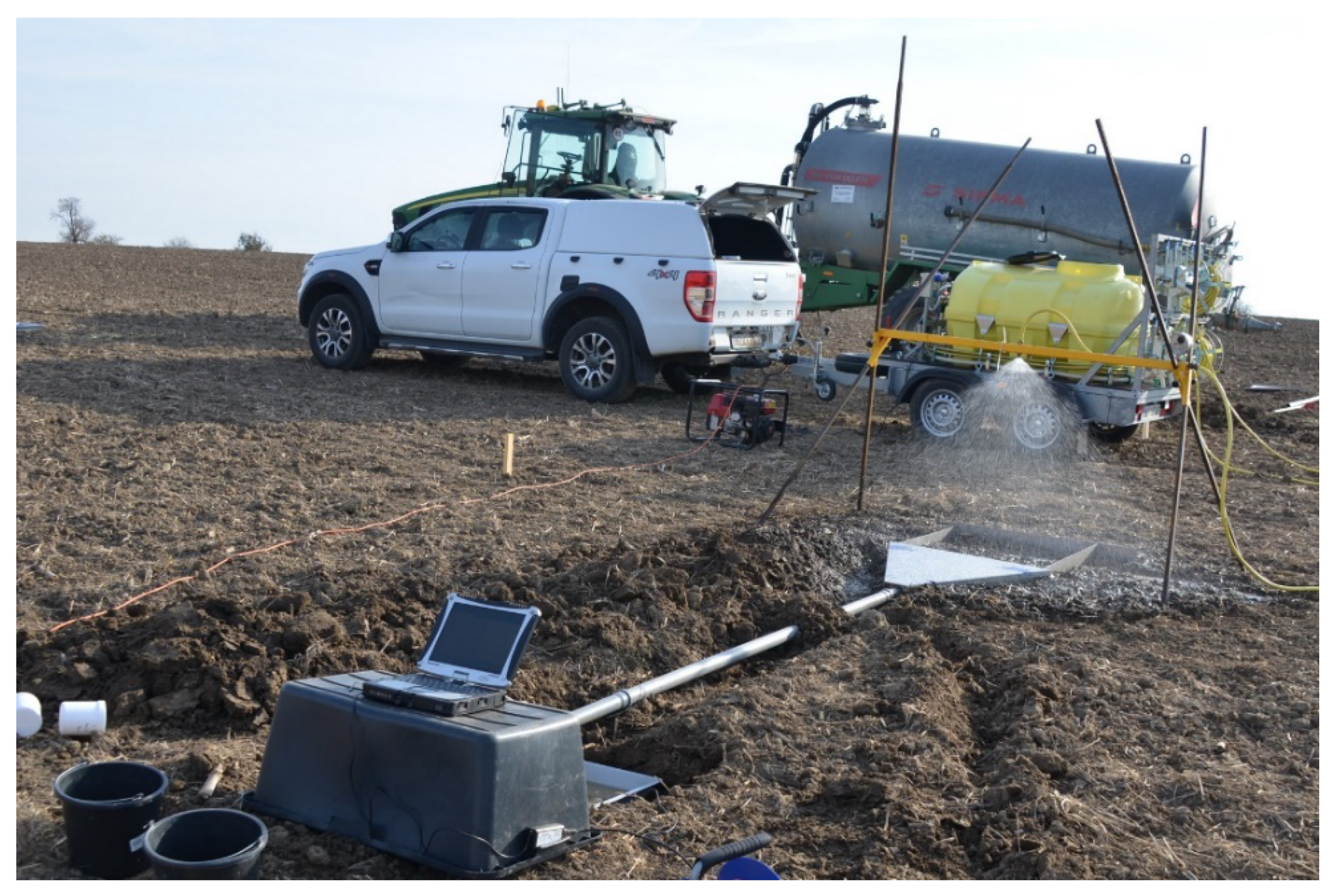
2.2.2. Field Measurements of Water Runoff and Soil Rainfall Loss
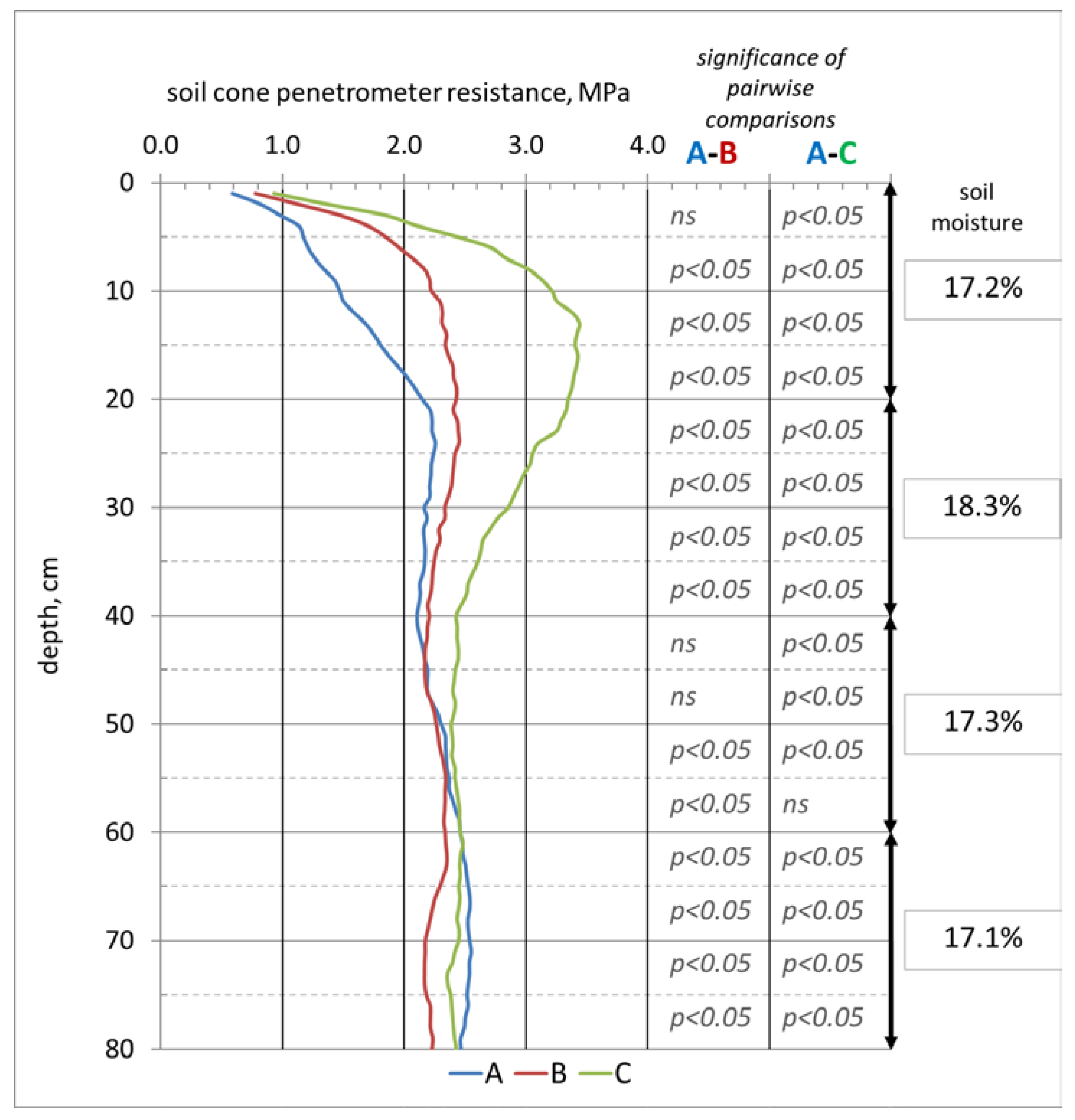
2.2.3. Soil Compaction Measurements
3. Results
3.1. Soil Erosion Model of the Field
3.2. Calculation of Water Runoff and Soil Loss
3.3. Determination of Soil Physical Parameters
4. Discussion
5. Conclusions
- -
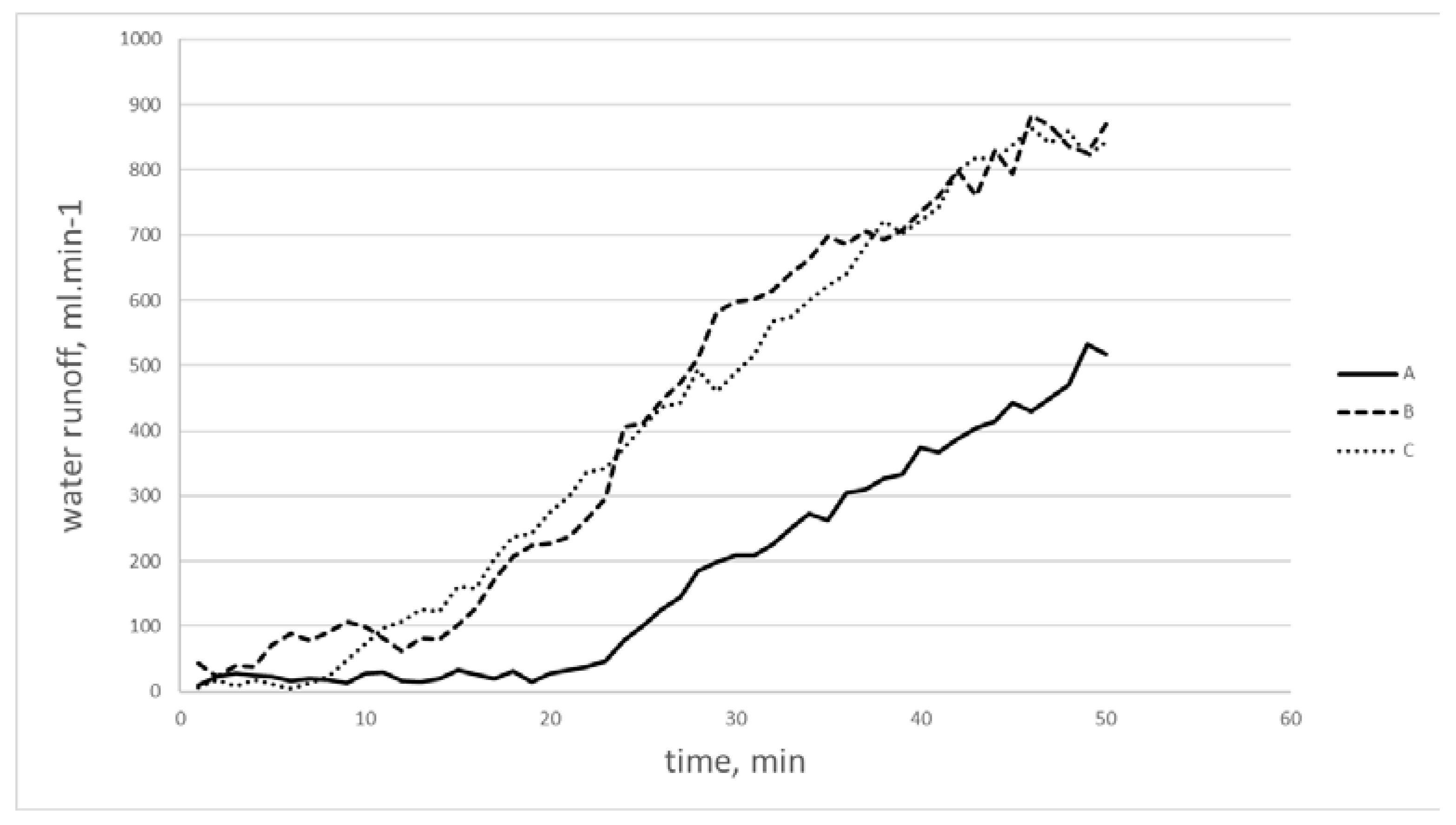
- the water runoff intensity was on average 2.5 times lower in the no traffic area (A), compared to the traffic areas (B and C);
- -
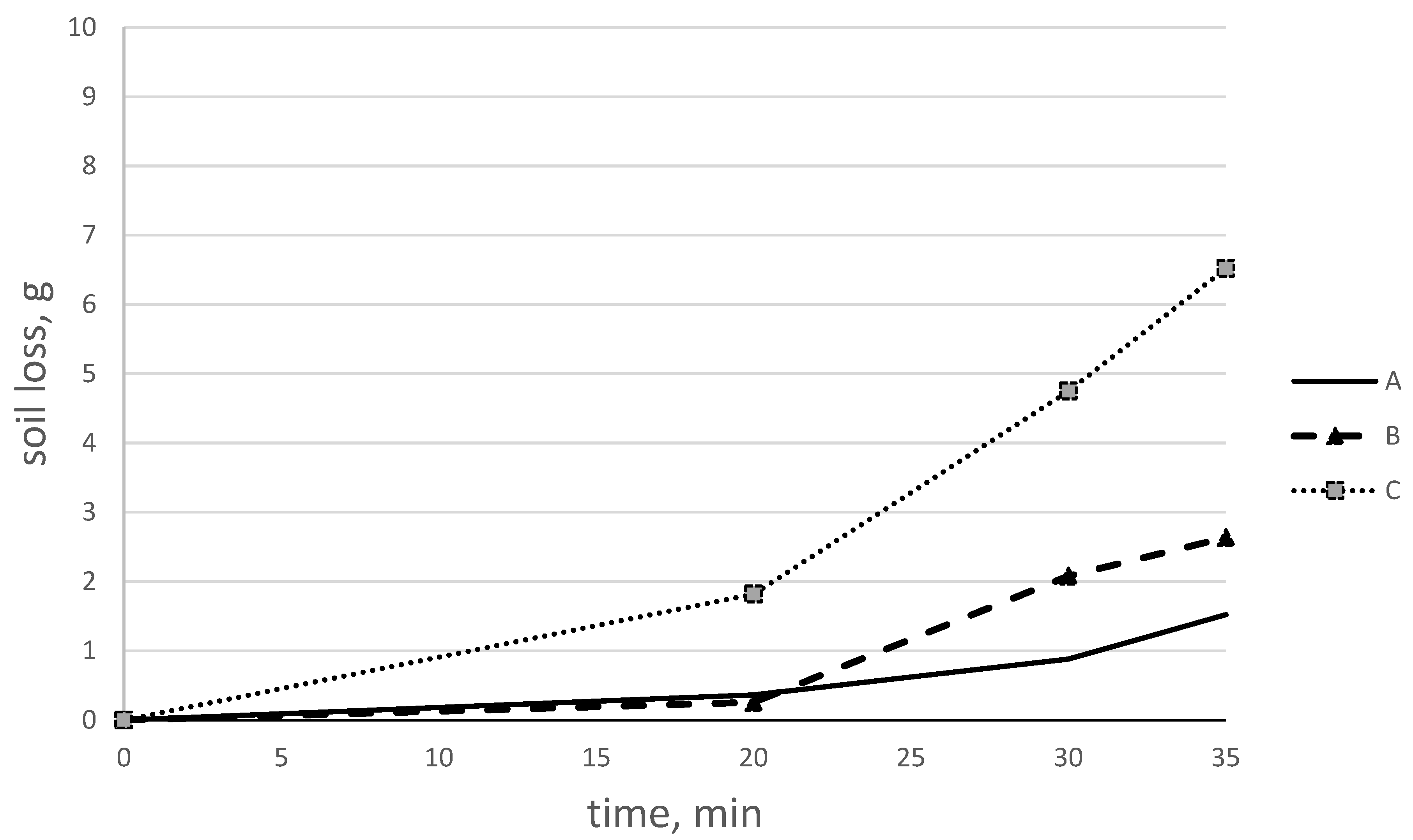
- the amount of total water and sediments collected after 35 min increased by 50% in the area with one machinery pass (B), compared to the A area; in the multiple traffic area (C), it tripled, compared to the no traffic area (A);
- -
- the weight of soil loss, expressed in terms of soil sediments, was 1.7 times higher in one machinery pass area (B) and 4.3 times higher in multiple pass area (C), compared to the no traffic area (A).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Antille, D.L.; Peets, S.; Galambošová, J.; Botta, G.F.; Rataj, V.; Macák, M.; Tullberg, J.N.; Chamen, W.C.T.; White, D.R.; Misiewicz, P.A.; et al. Review: Soil compaction and controlled traffic farming in arable and grass cropping systems. Agron. Res. 2019, 17, 653–682. [Google Scholar] [CrossRef]
- Chamen, W.C.T.; Moxey, A.P.; Towers, W.; Balana, B.; Hallett, P.D. Mitigating arable soil compaction: A review and analysis of arable cost and benefit data. Soil Tillage Res. 2015, 146, 10–25. [Google Scholar] [CrossRef]
- Kroulík, M.; Kumhála, F.; Hůla, J.; Honzík, I. The evaluation of agricultural machines field trafficking intensity for different soil tillage technologies. Soil Tillage Res. 2009, 105, 171–175. [Google Scholar] [CrossRef]
- Tullberg, J.N. Tillage, traffic and sustainability—A challenge for ISTRO. Soil Tillage Res. 2010, 111, 26–32. [Google Scholar] [CrossRef]
- Chamen, T. Controlled traffic farming—From worldwide research to adoption in Europe and its future prospects. Acta Technol. Agric. 2015, 3, 64–73. [Google Scholar] [CrossRef] [Green Version]
- Rataj, V.; Kumhálová, J.; Macák, M.; Barát, M.; Galambošová, J.; Chyba, J.; Kumhála, F. Long-Term Monitoring of Different Field Traffic Management Practices in Cereals Production with Support of Satellite Images and Yield Data in Context of Climate Change. Agronomy 2022, 12, 128. [Google Scholar] [CrossRef]
- Galambošová, J.; Macák, M.; Rataj, V.; Antille, D.L.; Godwin, R.J.; Chamen, W.C.T.; Žitňák, M.; Vitázková, B.; Ďuďák, J.; Chlpík, J. Field evaluation of controlled traffic farming in central Europe using commercially available machinery. Trans. ASABE 2017, 60, 657–669. [Google Scholar] [CrossRef]
- Vermeulen, G.D.; Mosquera, J. Soil, crop and emission responses to seasonal-controlled traffic in organic vegetable farming on loam soil. Soil Tillage Res. 2009, 102, 126–134. [Google Scholar] [CrossRef]
- Torbert, H.A.; Wood, C.W. Effects of soil compaction and water-filled pore space on soil microbial activity and N losses. Commun. Soil Sci. Plant Anal. 1992, 23, 1321–1331. [Google Scholar] [CrossRef]
- Antille, D.L.; Chamen, W.C.T.; Tullberg, J.N.; Lal, R. The potential of controlled traffic farming to mitigate greenhouse gas emissions and enhance carbon sequestration in arable land: A critical review. Trans. ASABE 2015, 58, 707–731. [Google Scholar] [CrossRef]
- Tullberg, J.N.; Yule, D.F.; McGarry, D. Controlled traffic farming: From research to adoption in Australia. Soil Tillage Res. 2007, 97, 272–281. [Google Scholar] [CrossRef]
- Puccio, D.; Comparetti, A.; Greco, C.; Raimondi, S. Proposal of a Nomenclature for Hydrogeological Instability Risks and Case Studies of Conservative Soil Tillage for Environmental Protection. Land 2022, 11, 108. [Google Scholar] [CrossRef]
- Soane, B.D.; Ball, B.C.; Arvidsson, J.; Basch, G.; Moreno, F.; Roger-Estrade, J. No-till in northern, western and south-western Europe: A review of problems and opportunities for crop production and the environment. Soil Tillage Res. 2012, 118, 66–87. [Google Scholar] [CrossRef] [Green Version]
- Godwin, R.J.; White, D.R.; Dickin, E.T.; Kaczorowska-Dolowy, M.; Millington, W.A.J.; Pope, E.K.; Misiewicz, P.A. The effects of traffic management systems on the yield and economics of crops grown in deep, shallow and zero tilled sandy loam soil over eight years. Soil Tillage Res. 2022, 223, 105465. [Google Scholar] [CrossRef]
- Panagos, P.; Imeson, A.; Meusburger, K.; Borrelli, P.; Poesen, J.; Alewell, C. Soil Conservation in Europe: Wish or Reality? Land Degrad. Dev. 2016, 27, 1547–1551. [Google Scholar] [CrossRef] [Green Version]
- Gasso, V.; Sørensen, C.A.G.; Oudshoorn, F.W.; Green, O. Controlled traffic farming: A review of the environmental impacts. Eur. J. Agron. 2013, 48, 66–73. [Google Scholar] [CrossRef]
- Tullberg, J.; Antille, D.L.; Bluett, C.; Eberhard, J.; Scheer, C. Controlled traffic farming effects on soil emissions of nitrous oxide and methane. Soil Tillage Res. 2018, 176, 18–25. [Google Scholar] [CrossRef]
- Hussein, M.A.; Antille, D.L.; Kodur, S.; Chen, G.; Tullberg, J.N. Controlled traffic farming effects on productivity of grain sorghum, rainfall and fertiliser nitrogen use efficiency. J. Agric. Food Res. 2021, 3, 100111. [Google Scholar] [CrossRef]
- Novara, A.; Novara, A.; Comparetti, A.; Santoro, A.; Cerdà, A.; Rodrigo-Comino, J.; Gristina, L. Effect of Standard Disk Plough on Soil Translocation in Sloping Sicilian Vineyards. Land 2022, 11, 148. [Google Scholar] [CrossRef]
- Tullberg, J.N.; Ziebarth, P.J.; Yuxia, L. Tillage and traffic effects on runoff. Aust. J. Soil Res. 2001, 39, 249–257. [Google Scholar] [CrossRef]
- Li, Y.X.; Tullberg, J.N.; Freebairn, D.M. Wheel traffic and tillage effects on runoff and crop yield. Soil Tillage Res. 2007, 97, 282–292. [Google Scholar] [CrossRef]
- Wang, X.Y.; Gao, H.W.; Tullberg, J.N.; Li, H.W.; Kuhn, N.; Mchugh, A.D.; Li, Y.X. Traffic and tillage effects on runoff and soil loss on the Loess Plateau of northern China. Aust. J. Soil Res. 2008, 46, 667–675. [Google Scholar] [CrossRef]
- Titmarsh, G.; Wockner, G.; Waters, D. Controlled traffic farming and soil erosion considerations. In Proceedings of the ISCO 2004- 13 th International Soil Conservation Organisation Conference, Brisbane, Australia, 4–8 July 2004; Conserving Soil and Water for Society: Sharing Solutions. Available online: https://www.tucson.ars.ag.gov/isco/isco13/PAPERS%20R-Z/TITMARSH.pdf (accessed on 11 November 2022).
- Boulal, H.; Gómez-Macpherson, H.; Gómez, J.A.; Mateos, L. Effect of soil management and traffic on soil erosion in irrigated annual crops. Soil Tillage Res. 2011, 115–116, 62–70. [Google Scholar] [CrossRef]
- McHugh, A.D.; Tullberg, J.N.; Freebairn, D.M. Controlled traffic farming restores soil structure. Soil Tillage Res. 2009, 104, 164–172. [Google Scholar] [CrossRef]
- Hrivňáková, K.; Makovníková, J.; Barančíková, G.; Bezák, P.; Bezáková, Z.; Dodok, R.; Grečo, V.; Chlpík, J.; Kobza, J.; Lištjak, M.; et al. Unified Analytical Procedures for Soil (Jednotné Pracovné Postupy Rozborov Pôd), 1st ed.; Soil Science and Conservation Research Institute (Výskumný Ústav Pôdoznalectva A Ochrany Pôdy): Bratislava, Slovakia, 2011; p. 136. ISBN 978-80-89128-89-1. [Google Scholar]
- Hraško, J.; Červenka, L.; Facek, Z.; Komár, J.; Němeček, J.; Pospíšil, F.; Sirový, V. Methods for Soil Analyses (Rozbory Pôd), 1st ed.; Slovenské Vydavateľstvo Pôdohospodárskej Literatúry: Bratislava, Slovakia, 1962; p. 342. ISBN 64-028-62 04-17. [Google Scholar]
- Wischmeier, W.H.; Smith, D.D. Predicting Rainfall Erosion Losses—A Guide to Conservation Planning (Agriculture Handbook Number 537), 1st ed.; Science and Education Administration of U.S. Department of Agriculture: Washington, DC, USA, 1978; p. 60. Available online: https://naldc.nal.usda.gov/download/CAT79706928/PDF (accessed on 18 October 2022).
- Moore, I.D.; Burch. G. Physical basis of the length-slope factor in the Universal Soil Loss Equation. Soil Sci. Soc. Am. J. 1986, 50, 1294–1298. [Google Scholar] [CrossRef]
- Desmet, P.J.J.; Govers, G.; Poesen, J.; Goosens, D. GIS-based simulation of erosion and deposition patterns in an agricultural landscape: A comparison of model results with soil map information. Catena 1995, 25, 389–401. [Google Scholar] [CrossRef]
- Mitasova, H.; Hofierka, J.; Zlocha, M.; Iverson, L.R. Modelling topographic potential for erosion and deposition using GIS. Int. J. Geogr. Inf. Syst. 1996, 10, 629–641. [Google Scholar] [CrossRef] [Green Version]
- Foster, G.R. Comment on “Length-slope factors for the Revised Universal Soil Loss Equation: Simplified method of estimation”. J. Soil Water Conserv. 1992, 47, 423–428. Available online: https://www.jswconline.org/content/47/5/423 (accessed on 18 October 2022).
- DTM 5.0 (Spatial Data Set of Digital Terrain Model Version 5.0, Resolution 1m); Geodesy, Cartography and Cadastre Authority of the Slovak Republic–“ÚGKK SR”: Bratislava, Slovakia, 2018; Available online: https://www.geoportal.sk/en/zbgis/als_dmr/ (accessed on 14 February 2022).
- O’Callaghan, J.F.; Mark, D.M. The extraction of drainage networks from digital elevation data. Comput. Vis. Graph. Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Orthophotomosaic Map of Slovakia, (Digital Map of Slovak Republic, Resolution 0,20 m); Geodetic and Cartographic Institute Bratislava–“GKÚ” and National Forest Centre–“NLC”: Bratislava, Slovakia, 2020; Available online: https://www.geoportal.sk/en/zbgis/orthophotomosaic/ (accessed on 14 February 2022).
- Ilavská, B.; Jambor, P.; Lazúr, R. Identification of Soil Quality Degradation by Water and Wind Erosion and Proposals of Actions (Identifikácia Ohrozenia Kvality Pôdy Vodnou A Veternou Eróziou A Návrhy Opatrení), 1st ed.; Soil Science and Conservation Research Institute (Výskumný Ústav Pôdoznalectva A Ochrany Pôdy): Bratislava, Slovakia, 2005; p. 60. Available online: https://www.vupop.sk/dokumenty/rozne_identifikacia_ohrozenia_kvality.pdf (accessed on 19 October 2022).
- SHMÚ. Climate normal of atmospheric rain fall for period 1981–2010 in Slovakia. In Slovak Hydrometeorological Institute, National Climatologic Program–Roll 15; Ministry of Environment of Slovak Republic: Bratislava, Slovakia, 2020; ISBN 978–80–99929–04–4. [Google Scholar]
- Kuráž, M.; Kroulik, M.; Novák, P. Evaluation of Surface Contamination of the Hydrographic Network from Erosion, Detection and Quantification of the Degree of Pollution, Location of its Sources and Effective Prediction—Certificate Methodology; Czech University of Life Sciences: Prague, Czech Republic, 2020; ISBN 978-80-213-3071-9. Available online: https://drutes.org/~miguel/tacr-plos_kont/Hodnoceni_plosne_kontaminace_hydrograficke_site_metodika.pdf (accessed on 19 October 2022). (In Czech)
- ASABE S313.3; Soil Cone Penetrometer. Standard by The American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 1999; p. 6. Available online: https://elibrary.asabe.org/abstract.asp?aid=44232&t=2&redir=&redirType= (accessed on 14 October 2022).
- ASABE EP542.1; Procedures for Using and Reporting Data Obtained with the Soil Cone Penetrometer. Standard by The American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2019; p. 6. Available online: https://elibrary.asabe.org/abstract.asp?aid=50970&t=3&redir=&redirType= (accessed on 14 October 2022).
- ISO 11465; Soil Quality—Determination of Dry Matter and Water Content on a Mass Basis—Gravimetric Method. 1st ed. Standard by the International Standard Organization: Geneva, Switzerland, 1993; p. 3. Available online: https://www.iso.org/obp/ui/#iso:std:iso:11465:ed-1:v1:en (accessed on 15 January 2022).
- StatSoft. Electronic Statistics Textbook; StatSoft, Inc.: Tulsa, OK, USA, 2013; Available online: http://www.statsoft.com/textbook/ (accessed on 20 January 2022).
- Mouazen, A.M.; Palmqvist, M. Development of a Framework for the Evaluation of the Environmental Benefits of Controlled Traffic Farming. Sustainability 2015, 7, 8684–8708. [Google Scholar] [CrossRef] [Green Version]
- Shubha, K.; Singh, N.R.; Mukherjee, A.; Maity, A. Controlled Traffic Farming: An Approach to Minimize Soil Compaction and Environmental Impact on Vegetable and Other Crops. Curr. Sci. 2020, 119, 1760–1766. [Google Scholar] [CrossRef]
- Vincent-Caboud, L.; Peigné, J.; Casagrande, M.; Silva, E.M. Overview of Organic Cover Crop-Based No-Tillage Technique in Europe: Farmers’ Practices and Research Challenges. Agriculture 2017, 7, 42. [Google Scholar] [CrossRef] [Green Version]
- 508/2004 Z.z.—Annex No. 6; Limit Values of Agricultural Soil Properties Degradation for Erosion, Compaction and Organic Matter Loses and Methods of Their Determination Loses (Limitné Hodnoty Poškodenia Vlastností Poľnohospodárskej Pôdy Pre Eróziu, Zhutnenie A Úbytok Pôdnej Organickej Hmoty A Metódy Ich Určenia Podľa Vybraných Ukazovateľov). 1st ed. Legislative Announcement of Ministry of Agriculture and Rural Develompment of the Slovak Republic: Bratislava, Slovakia, 2004; p. 48. Available online: https://www.slov-lex.sk/static/pdf/2004/508/ZZ_2004_508_20130401.pdf (accessed on 19 October 2022).
- Antal., J.; Streďanský, J. Soil Protection and Land Improvement (Ochrana A Zúrodňovanie Pôdy), 1st ed.; Slovak University of Agriculture: Nitra, Slovakia, 2013; p. 206. ISBN 9788055209661. [Google Scholar]
- Chamen, W.C.T. The Effects of Low and Controlled Traffic Systems on Soil Physical Properties, Yields and Profitability of Cereal Crops on a Range of Soil Types. Ph.D. Thesis, Cranfield University, Cranfield, UK, 2011; p. 290. Available online: https://dspace.lib.cranfield.ac.uk/handle/1826/7009 (accessed on 19 October 2022).
- Chyba, J. The Influence of Traffic Intensity and Soil Texture on Soil Water Infiltration Rate. Master’s Thesis, Harper Adams University College, Newport, UK, 2012. [Google Scholar]
- McPhee, J.E.; Antille, D.L.; Tullberg, J.N.; Doyle, R.B.; Boersma, M. Managing soil compaction—A choice of low-mass autonomous vehicles or controlled traffic? Biosyst. Eng. 2020, 195, 227–241. [Google Scholar] [CrossRef]
- Vermeulen, G.D.; Tullberg, J.N.; Chamen, W.C.T. Controlled traffic farming. In Soil Engineering (Soil Biology Book Series), 1st ed.; Dedousis, A.P.A., Bartzanas, T.B., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 20, pp. 101–120. [Google Scholar] [CrossRef]
- Koolen, A.J. Chapter 2—Mechanics of Soil Compaction. Dev. Agric. Eng. 1994, 11, 23–44. [Google Scholar] [CrossRef]
- Galambošová, J. Precision Agriculture Technologies for Managing Variability of Selected Crop and Soil Parameters to Improve Production Efficiency. Inaugural Dissertation, Slovak University of Agriculture in Nitra, Nitra, Slovakia, 2017; p. 179. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
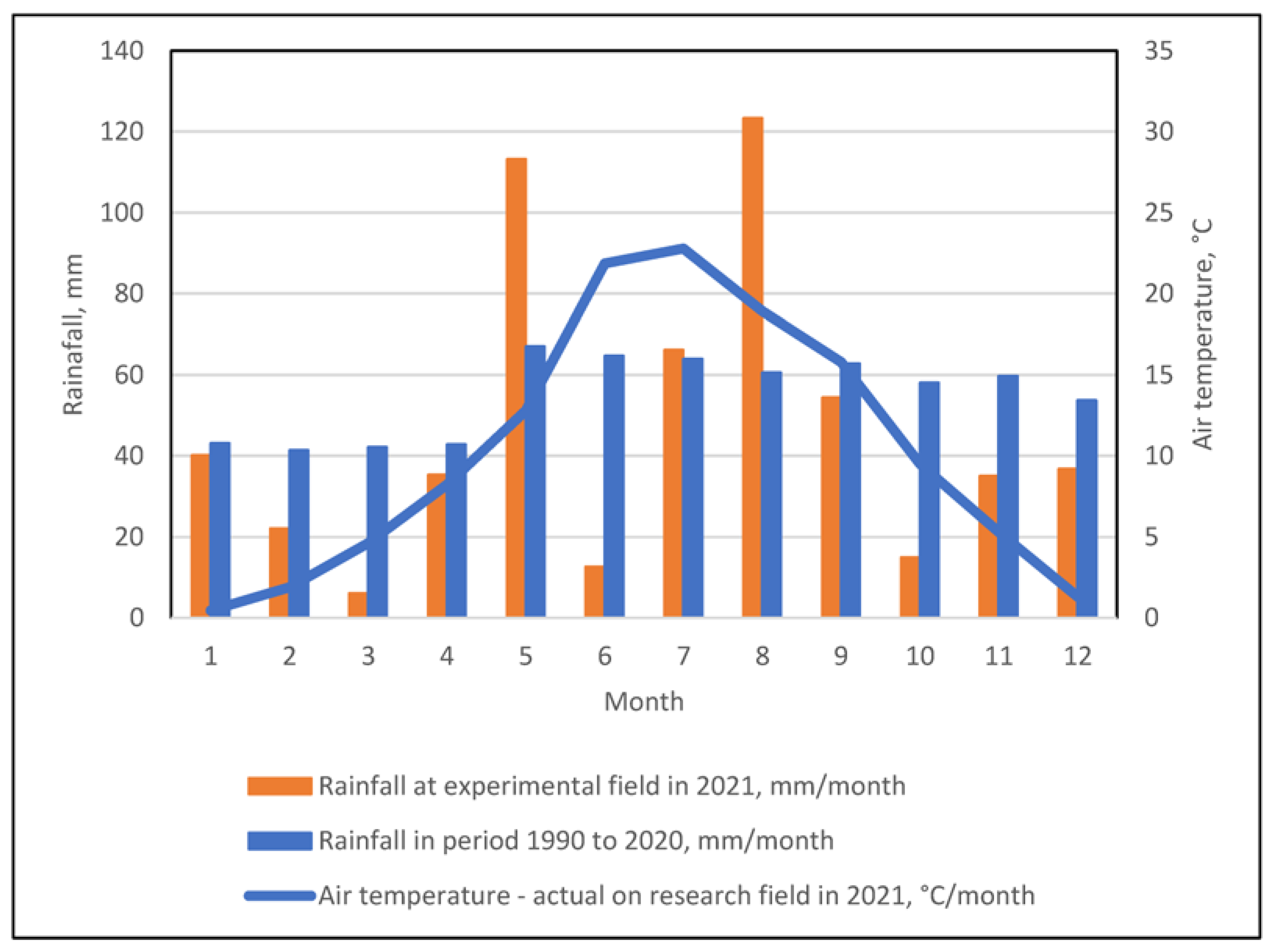
| Parameter | Average Yearly Value in the Period 1991–2020, mm [37] | Actual Yearly Value in Experimental Field in 2021, mm | Difference, mm | Relative to Average, % |
|---|---|---|---|---|
| otal rainfall, mm | 660.00 | 560.20 | −99.80 | 84.88 |
| Air temperature, °C | 10.70 | 10.29 | −0.41 | 96.16 |
| Relative air humidity, % | 71.90 | 75.77 | 3.87 | 105.38 |
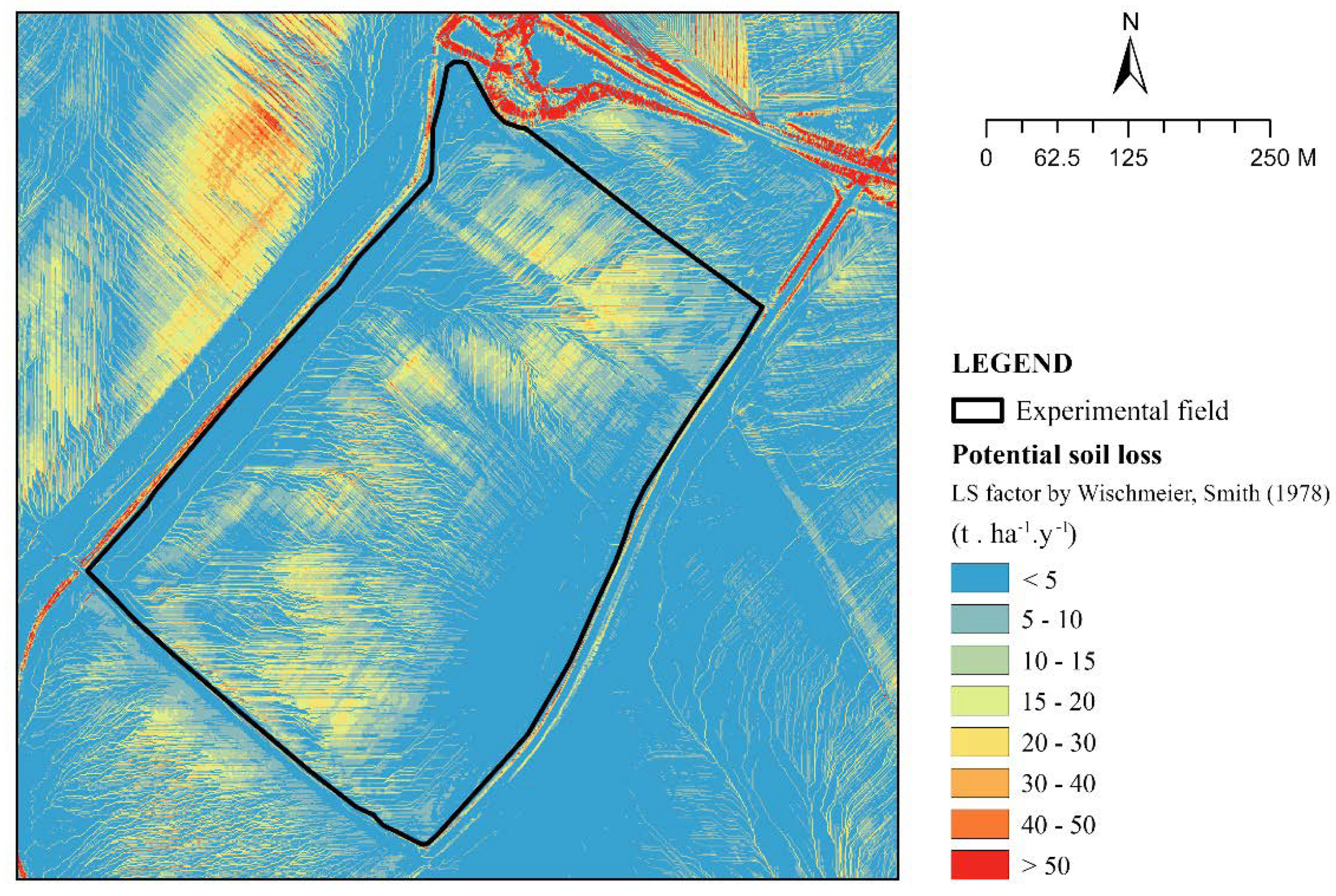
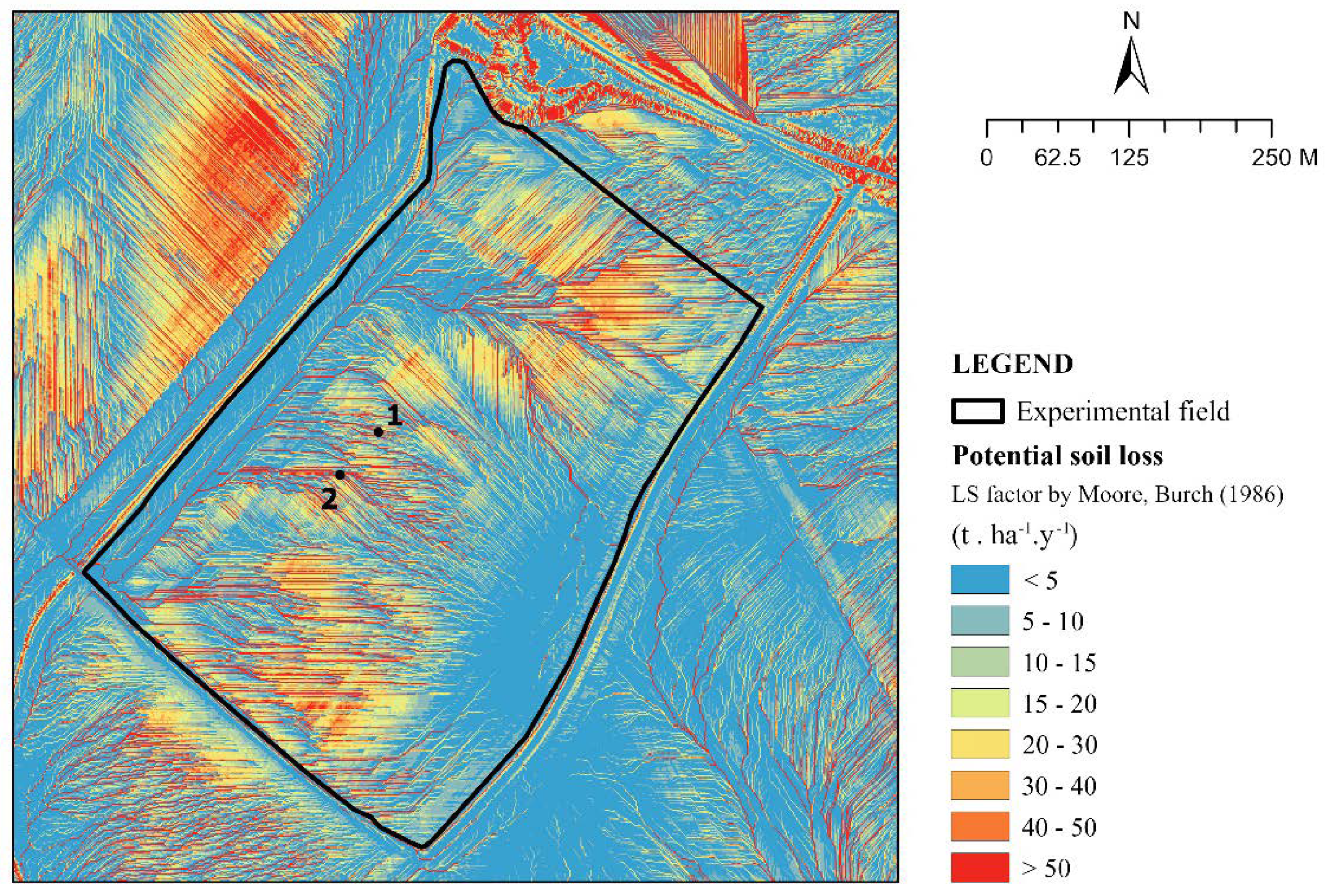
| Category | Yearly Soil Loss, t ha−1 | USLE [28] | USLE [29] | ||
|---|---|---|---|---|---|
| (LS by Wischmeier and Smith, 1978) | (LS by Moore and Burch, 1986) | ||||
| Area, m2 | Area, % | Area, m2 | Area, % | ||
| 1 | <5 | 107,380 | 54.20 | 84,326 | 42.6 |
| 2 | 5.01–10 | 44,908 | 22.67 | 33,850 | 17.1 |
| 3 | 10.01–15 | 24,329 | 12.28 | 20,174 | 10.2 |
| 4 | 15.01–20 | 12,620 | 6.37 | 13,824 | 7.0 |
| 5 | 20.01–30 | 7757 | 3.92 | 16,447 | 8.3 |
| 6 | 30.01–40 | 1010 | 0.51 | 8436 | 4.3 |
| 7 | 40.01–50 | 103 | 0.05 | 4933 | 2.5 |
| 8 | 50.01< | 10 | 0.01 | 16,127 | 8.1 |
| Sum: | 198,117 | 100.00 | 198,117 | 100.0 | |
| Traffic Treatment | Bulk Density, g cm−3 | Soil Moisture Content (Gravimetric), % | Soil Moisture Content (Volumetric), % | Field Water Capacity, mm | Point of Decreased Availability, mm | Wilting Point, mm |
|---|---|---|---|---|---|---|
| A | 1.53 | 22.86 | 34.89 | 348.9 | 226.8 | 167.7 |
| B | 1.55 | 22.14 | 34.24 | 342.4 | 222.5 | 164.6 |
| C | 1.57 | 21.42 | 33.71 | 337.1 | 219.1 | 162.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Macák, M.; Galambošová, J.; Kumhála, F.; Barát, M.; Kroulík, M.; Šinka, K.; Novák, P.; Rataj, V.; Misiewicz, P.A. Reduction in Water Erosion and Soil Loss on Steep Land Managed by Controlled Traffic Farming. Land 2023, 12, 239. https://doi.org/10.3390/land12010239
Macák M, Galambošová J, Kumhála F, Barát M, Kroulík M, Šinka K, Novák P, Rataj V, Misiewicz PA. Reduction in Water Erosion and Soil Loss on Steep Land Managed by Controlled Traffic Farming. Land. 2023; 12(1):239. https://doi.org/10.3390/land12010239
Chicago/Turabian StyleMacák, Miroslav, Jana Galambošová, František Kumhála, Marek Barát, Milan Kroulík, Karol Šinka, Petr Novák, Vladimír Rataj, and Paula A. Misiewicz. 2023. "Reduction in Water Erosion and Soil Loss on Steep Land Managed by Controlled Traffic Farming" Land 12, no. 1: 239. https://doi.org/10.3390/land12010239