
Analysis Model of the Relationship between Public Spatial Forms in Traditional Villages and Scenic Beauty Preference Based on LiDAR Point Cloud Data



Abstract
:1. Introduction
2. Related Works
3. Materials and Methods
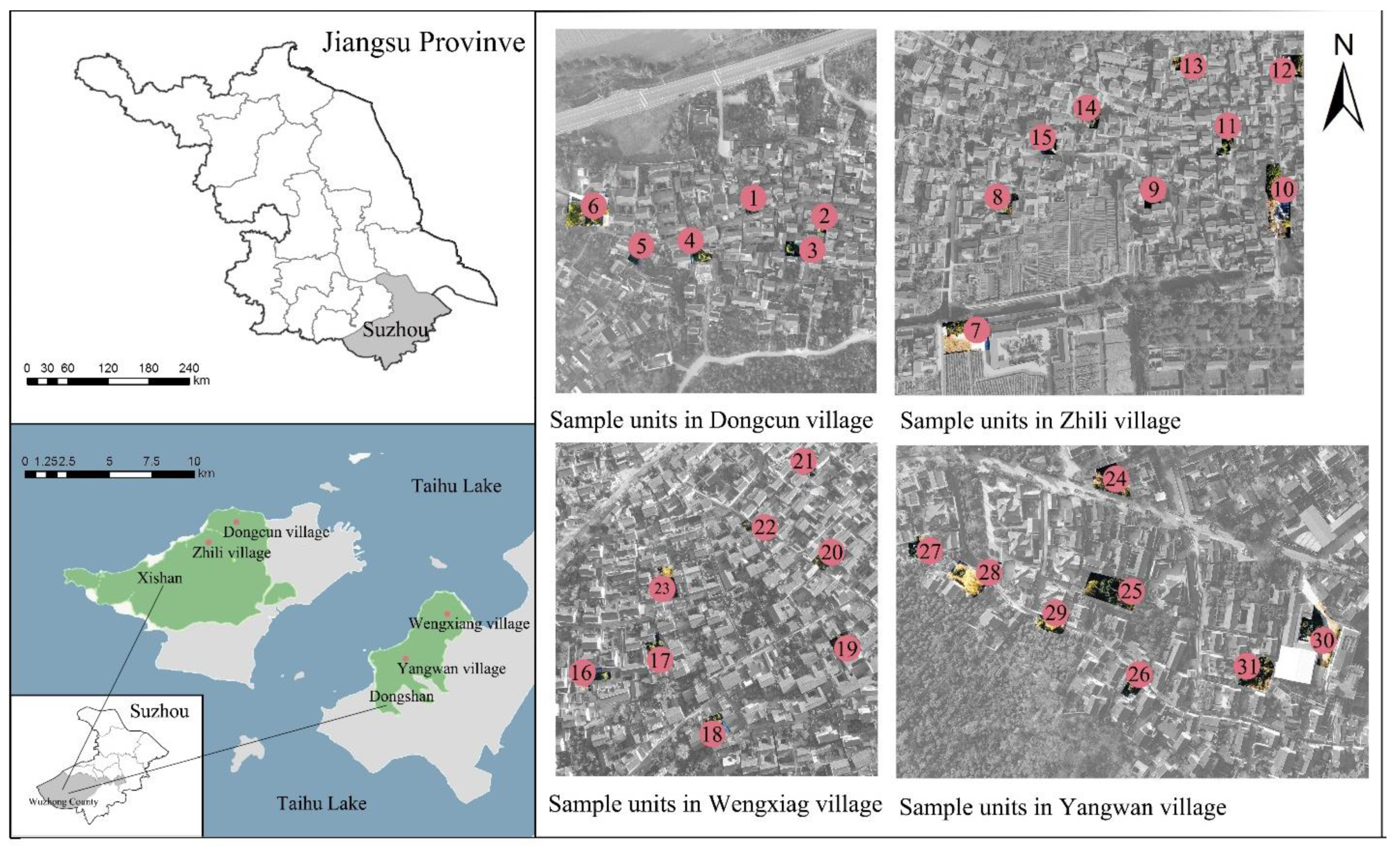
3.1. Research Area
3.2. Data Collection and Analysis Methods
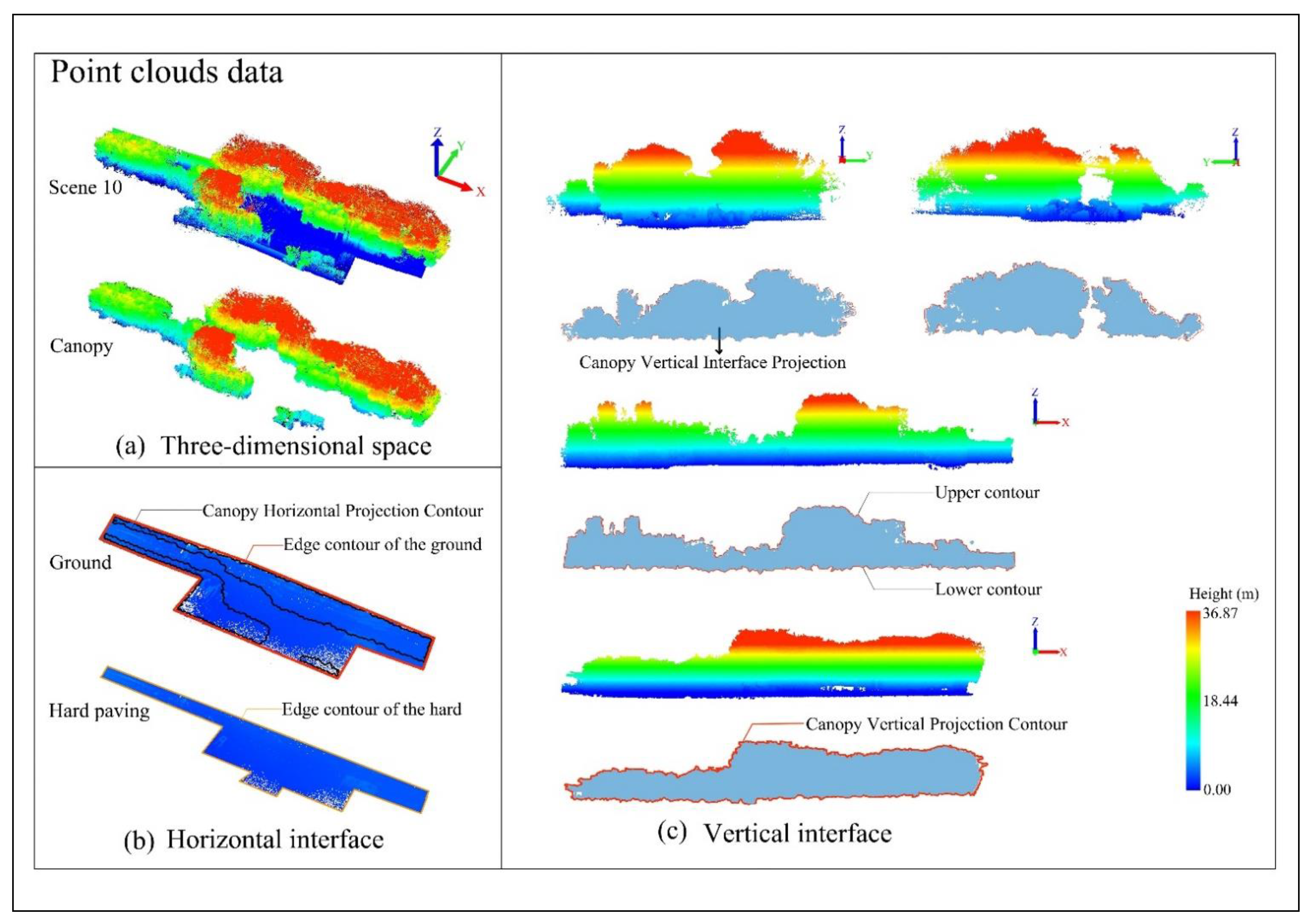
3.2.1. Quantification of Spatial Morphological Characteristics
3.2.2. SBE Evaluation
3.2.3. Statistical analysis
4. Results
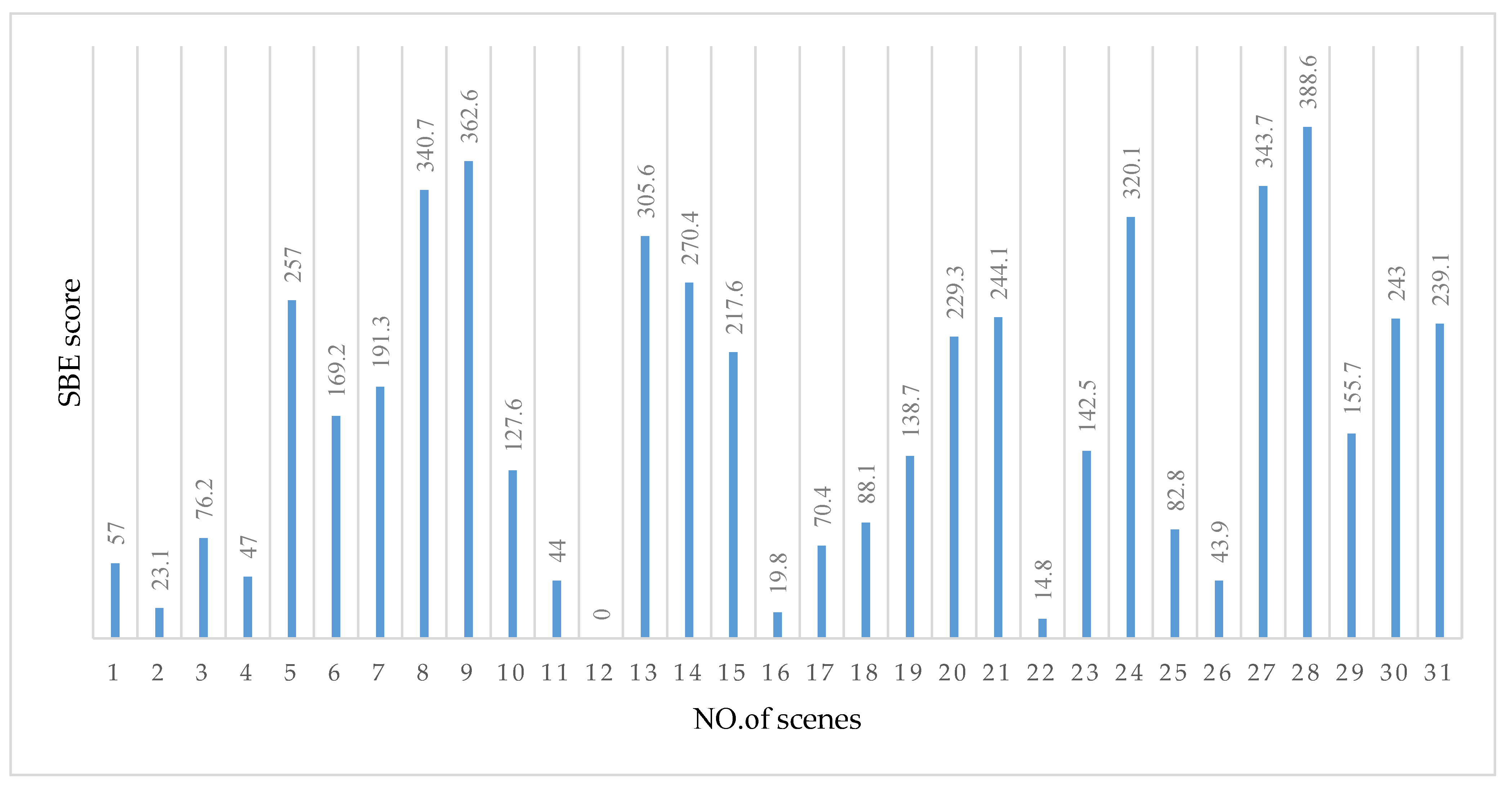
4.1. SBE Evaluation Result
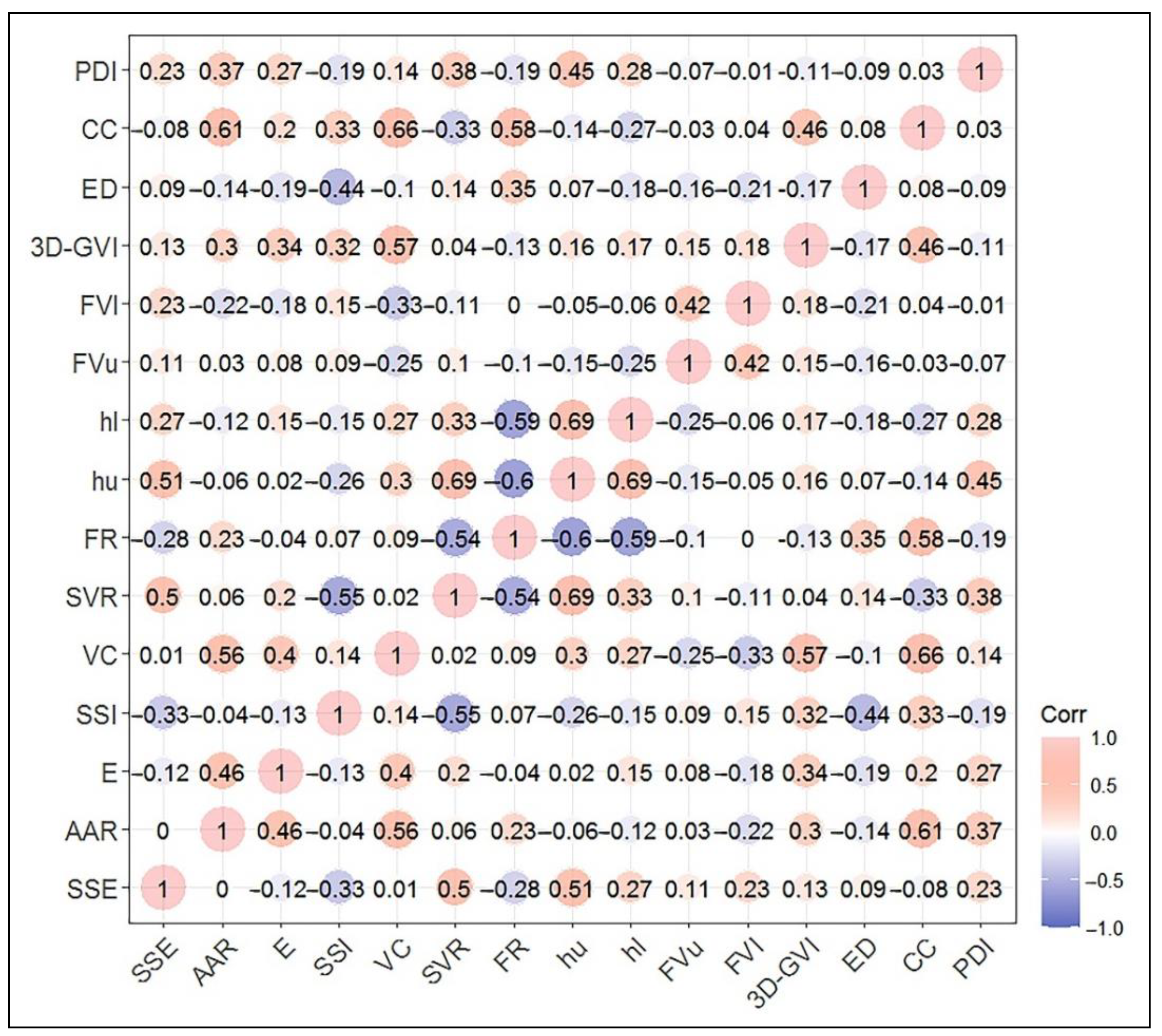
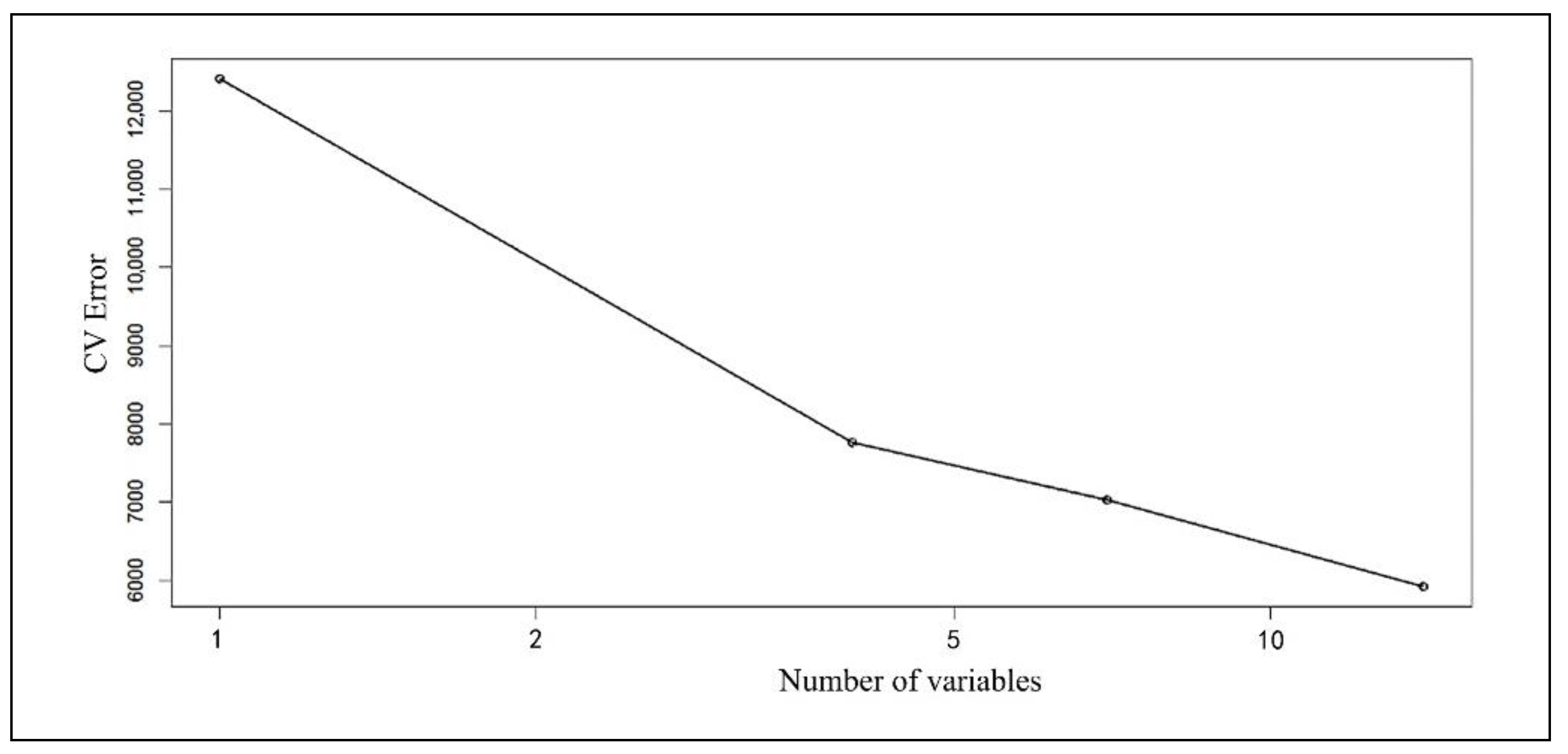
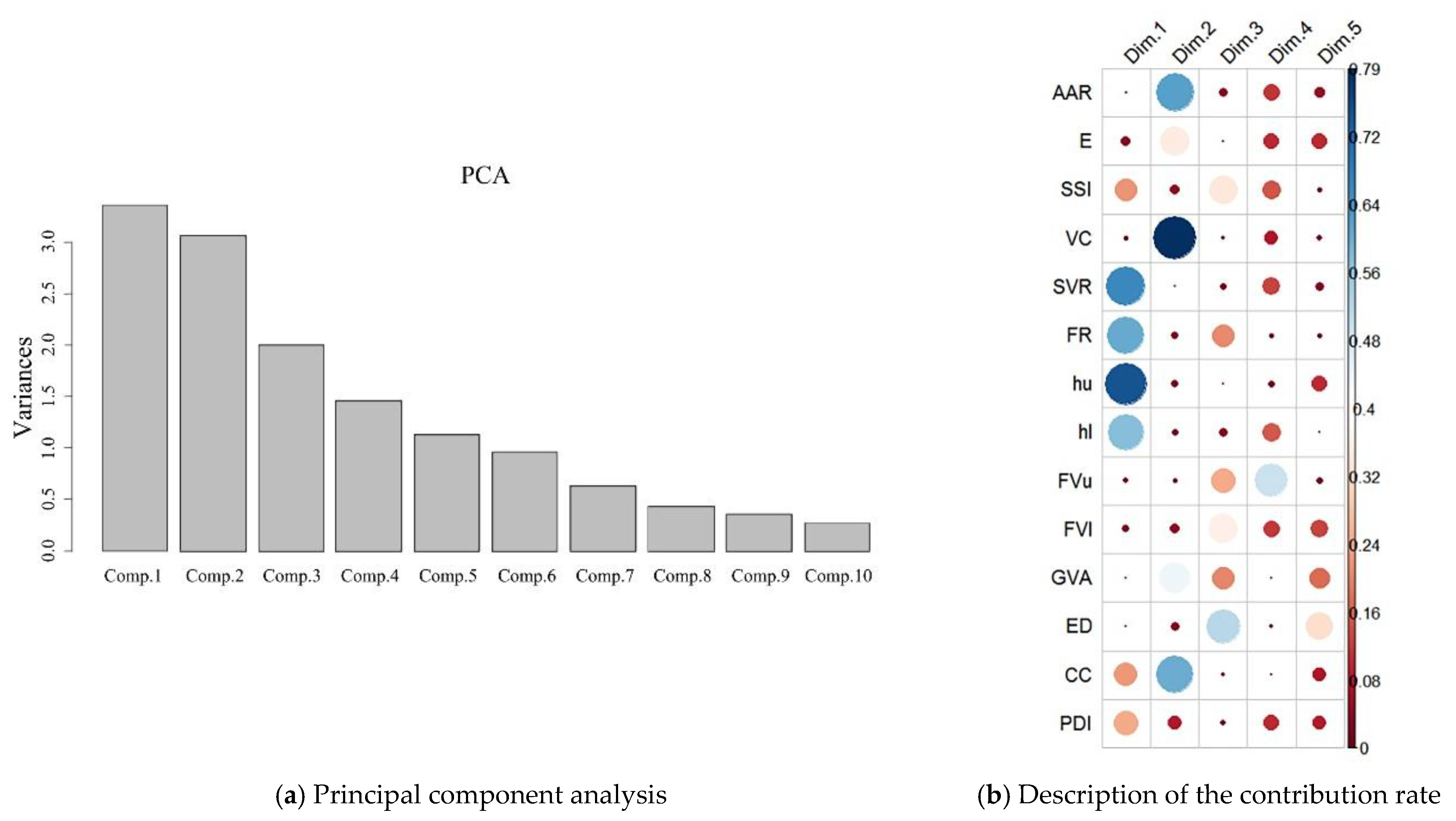
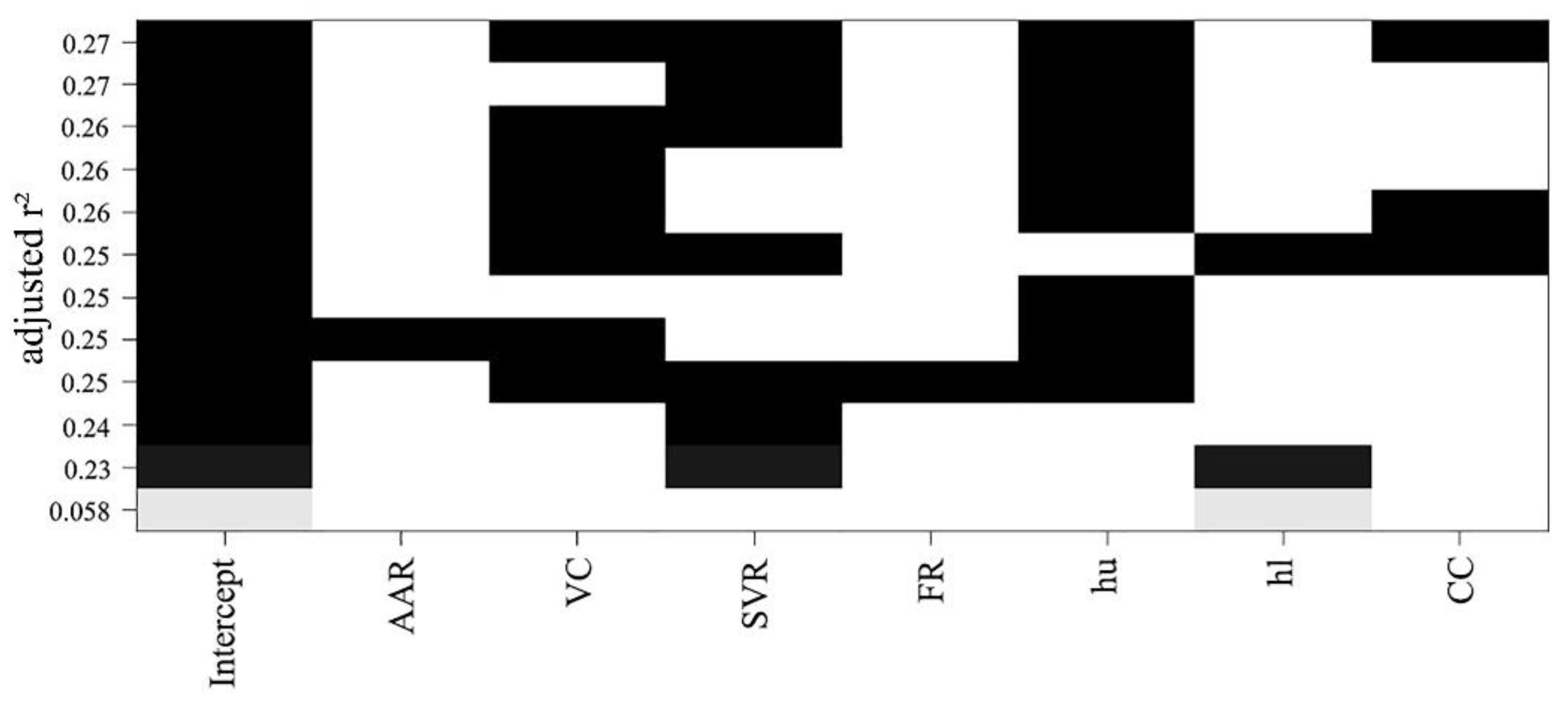
4.2. Parameter Screening
4.3. Validation of Model Accuracy
5. Discussion
5.1. Application Advantages of Handheld 3D Laser Scanners in Traditional Village Surveying and Mapping
5.2. Indicator Selection and Model Accuracy
5.3. Deficiencies and Prospects
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chhetri, P.; Arrowsmith, C. GIS-based Modelling of Recreational Potential of Nature-Based Tourist Destinations. Tour. Geogr. 2008, 10, 233–257. [Google Scholar] [CrossRef]
- Stoltz, J.; Grahn, P. Perceived Sensory Dimensions: An Evidence-based Approach to Greenspace Aesthetics. Urban For. Urban Green. 2021, 59, 126989. [Google Scholar] [CrossRef]
- Shulin, S.; Zhonghua, G.; Leslie, H.C. How does enclosure influence environmental preferences? A cognitive study on urban public open spaces in Hong Kong. Sustain. Cities Soc. 2014, 13, 148–156. [Google Scholar]
- Howley, P.; Donoghue, C.O.; Hynes, S. Exploring public preferences for traditional farming landscapes. Landsc. Urban Plan. 2012, 104, 66–74. [Google Scholar] [CrossRef]
- Schirpke, U.; Tasser, E.; Tappeiner, U. Predicting scenic beauty of mountain regions. Landsc. Urban Plan. 2013, 111, 1–12. [Google Scholar] [CrossRef]
- Daniel, T.C. Whither scenic beauty? Visual landscape quality assessment in the 21st century. Landsc. Urban Plan. 2001, 54, 267–281. [Google Scholar] [CrossRef]
- Zube, E.H.; Sell, J.L.; Taylor, J.G. Landscape perception: Research, application and theory. Landsc. Plan. 1982, 9, 1–33. [Google Scholar] [CrossRef]
- Zube, E.H.; Pitt, D.G. Cross-cultural perceptions of scenic and heritage landscapes. Landsc. Plan. 1981, 8, 69–87. [Google Scholar] [CrossRef]
- Tveit, M.S. Indicators of visual scale as predictors of landscape preference; a comparison between groups. J. Environ. Manag. 2009, 90, 2882–2888. [Google Scholar] [CrossRef] [PubMed]
- Hermes, J.; Berkel, D.V.; Burkhard, B.; Plieninger, T.; Fagerholm, N.; Haaren, C.V.; Albert, C. Assessment and valuation of recreational ecosystem services of landscapes. Ecosyst. Serv. 2018, 31, 289–295. [Google Scholar] [CrossRef] [PubMed]
- Wartmann, F.M.; Purves, S.R. Investigating sense of place as a cultural ecosystem service in different landscapes through the lens of language. Landscape Urban Plan 2018, 175, 169–183. [Google Scholar] [CrossRef]
- Hernández, J.; Garca, L.; Ayuga, F. Assessment of the visual impact made on the landscape by new buildings: A methodology for site selection. Landsc. Urban Plan. 2004, 68, 15–28. [Google Scholar] [CrossRef]
- Robinson, N. The planting design handbook. Arboric. J. 2011, 35, 59–60. [Google Scholar]
- De Vries, S.; De Groot, M.; Boers, J. Eyesores in sight: Quantifying the impact of man-made elements on the scenic beauty of Dutch landscapes. Landsc. Urban Plan. 2012, 105, 118–127. [Google Scholar] [CrossRef]
- Hagerhall, C.M.; Purcell, T.; Taylor, R. Fractal dimension of landscape silhouette outlines as a predictor of landscape preference. J. Environ. Psychol. 2004, 24, 247–255. [Google Scholar] [CrossRef]
- Liang, H.; Li, W.; Lai, S.; Zhu, L.; Jiang, W.; Zhang, Q. The integration of terrestrial laser scanning and terrestrial and unmanned aerial vehicle digital photogrammetry for the documentation of Chinese classical gardens—A case study of Huanxiu Shanzhuang, Suzhou, China. J. Cult. Heritage 2018, 33, S827726525. [Google Scholar] [CrossRef]
- Val, G.; Atauri, J.A.; Lucio, J. Relationship between landscape visual attributes and spatial pattern indices: A test study in Mediterranean-climate landscapes. Landsc. Urban Plan. 2006, 77, 393–407. [Google Scholar]
- Kempenaar, A.; Adri, V. Regional designing: A strategic design approach in landscape architecture. Des. Stud. 2018, 54, 80–95. [Google Scholar] [CrossRef]
- Guneroglu, N.; Bekar, M. A Methodology of Transformation from Concept to form in Landscape Design. J. Hist. Cult. Art Res. 2019, 8, 243–253. [Google Scholar] [CrossRef]
- Treib, M. The content of landscape form [The limits of formalism]. Landsc. J. 2001, 20, 119–140. [Google Scholar] [CrossRef] [Green Version]
- Polat, A.T.; Akay, A. Relationships between the visual preferences of urban recreation area users and various landscape design elements. Urban For. Urban Green. 2015, 14, 573–582. [Google Scholar] [CrossRef]
- Gobster, P.H.; Ribe, R.G.; Palmer, J.F. Themes and trends in visual assessment research: Introduction to the Landscape and Urban Planning special collection on the visual assessment of landscapes. Landsc. Urban Plan. 2019, 191, 103635. [Google Scholar] [CrossRef]
- Wu, C.; Xiao, Q.; Mcpherson, E.G. A method for locating potential tree-planting sites in urban areas: A case study of Los Angeles, USA. Urban For. Urban Green. 2008, 7, 65–76. [Google Scholar] [CrossRef]
- Yan, J.; Zhou, W.; Han, L.; Qian, Y. Mapping vegetation functional types in urban areas with WorldView-2 imagery: Integrating object-based classification with phenology. Urban For. Urban Green. 2018, 31, S945842183. [Google Scholar] [CrossRef]
- Ren, Z.; Zheng, H.; He, X.; Zhang, D.; Yu, X.; Shen, G. Spatial estimation of urban forest structures with Landsat TM data and field measurements. Urban For. Urban Green. 2015, 14, 336–344. [Google Scholar] [CrossRef]
- Gupta, K.; Roy, A.; Luthra, K.; Maithani, S.; Mahavir. GIS based analysis for assessing the accessibility at hierarchical levels of urban green spaces. Urban For. Urban Green. 2016, 19, 198–211. [Google Scholar] [CrossRef]
- Margaritis, E.; Kang, J. Relationship between urban green spaces and other features of urban morphology with traffic noise distribution. Urban For. Urban Green. 2016, 15, 174–185. [Google Scholar] [CrossRef]
- Zhao, S.M.; Ma, Y.F.; Wang, J.L.; You, X.Y. Landscape Pattern Analysis and Ecological Network Planning of Tianjin City. Urban For. Urban Green. 2019, 46, 126479. [Google Scholar] [CrossRef]
- Majumdar, D.D.; Biswas, A. Quantifying land surface temperature change from LISA clusters: An alternative approach to identifying urban land use transformation. Landsc. Urban Plan. 2016, 153, 51–65. [Google Scholar] [CrossRef]
- Shukla, A.; Jain, K. Analyzing the impact of changing landscape pattern and dynamics on land surface temperature in Lucknow city, India. Urban For. Urban Green. 2020, 58, 126877. [Google Scholar] [CrossRef]
- Zhang, R.; Zhang, L.; Zhong, Q.; Zhang, Q.; Ji, Y.; Song, P.; Wang, Q. An optimized evaluation method of an urban ecological network: The case of the Minhang District of Shanghai—ScienceDirect. Urban For. Urban Green. 2021, 62, 127158. [Google Scholar] [CrossRef]
- Fratarcangeli, C.; Fanelli, G.; Franceschini, S.; De Sanctis, M.; Travaglini, A. Beyond the urban-rural gradient: Self-Organizing Map detects the nine landscape types of the city of Rome. Urban For. Urban Green. 2019, 38, 354–370. [Google Scholar] [CrossRef]
- Peter, C.M.; Stigaard, L.M.; Nyholm, J.R.; Søren, S.; René, G. Designing and Testing a UAV Mapping System for Agricultural Field Surveying. Sensors 2017, 17, 2703. [Google Scholar]
- Kumar, P.B.; Patil, A.K.; Chethana, B.; Chai, Y.H. On-Site 4-in-1 Alignment: Visualization and Interactive CAD Model Retrofitting Using UAV, LiDAR’s Point Cloud Data, and Video. Sensors 2019, 19, 3908. [Google Scholar]
- Patrikar, J.; Moon, B.G.; Scherer, S. Wind and the City: Utilizing UAV-Based In-Situ Measurements for Estimating Urban Wind Fields. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Godwin, C.; Chen, G.; Singh, K.K. The impact of urban residential development patterns on forest carbon density: An integration of LiDAR, aerial photography and field mensuration. Landsc. Urban Plan. 2015, 136, 97–109. [Google Scholar] [CrossRef]
- Ucar, Z.; Bettinger, P.; Merry, K.; Akbulut, R.; Siry, J. Estimation of urban woody vegetation cover using multispectral imagery and LiDAR. Urban For. Urban Green. 2017, 29, 248–260. [Google Scholar] [CrossRef]
- Qiang, Y.; Shen, S.; Chen, Q. Visibility analysis of oceanic blue space using digital elevation models. Landsc. Urban Plan. 2019, 181, 92–102. [Google Scholar] [CrossRef]
- Daniel, T.C.; Boster, R.S. Measuring Landscape Esthetics: The Scenic Beauty Estimation Method; Res. Pap. RM-RP-167; U.S. Department of Agriculture, Forest Service, Rocky Mountain Range and Experiment Station: Washington, DC, USA, 1976.
- Clay, G.R.; Daniel, T.C. Scenic landscape assessment: The effects of land management jurisdiction on public perception of scenic beauty. Landsc. Urban Plan. 2000, 25, 1–13. [Google Scholar] [CrossRef]
- Clay, G.R.; Smidt, R.K. Assessing the validity and reliability of descriptor variables used in scenic highway analysis. Landsc. Urban Plan. 2004, 66, 239–255. [Google Scholar] [CrossRef]
- Yao, Y.; Zhu, X.; Xu, Y.; Yang, H.; Xian, W.; Li, Y.; Zhang, Y. Assessing the visual quality of green landscaping in rural residential areas: The case of Changzhou, China. Environ. Monit. Assess 2012, 184, 951–967. [Google Scholar] [CrossRef] [PubMed]
- Arriaza, M.; Cañas-Ortega, J.F.; Cañas-Madueño, J.A.; Ruiz-Aviles, P. Assessing the visual quality of rural landscapes. Landsc. Urban Plan. 2004, 69, 115–125. [Google Scholar] [CrossRef]
- Rogge, E.; Nevens, F.; Gulinck, H. Perception of rural landscapes in Flanders: Looking beyond aesthetics. Landsc. Urban Plan. 2007, 82, 159–174. [Google Scholar] [CrossRef]
- Sevenant, M.; Antrop, M. Cognitive attributes and aesthetic preferences in assessment and differentiation of landscapes—ScienceDirect. J. Environ. Manag. 2009, 90, 2889–2899. [Google Scholar] [CrossRef]
- Sun, Y.N.; Zhao, X.; Wang, Y.H.; Li, F.Z.; Li, X. Study on the visual evaluation preference of rural landscape based on VR panorama. J. Beijing For. Univ. 2016, 38, 104–112. [Google Scholar]
- Daniel, T.C.; Meitner, M.M. Representational validity of landscape visualizations: The effects of graphical realism on perceived scenic beauty of forest vistas. J. Environ. Psychol. 2001, 21, 61–72. [Google Scholar] [CrossRef] [Green Version]
- Hull, R.B.; Stewart, W. Validity of photo-based scenic beauty judgments. J. Environ. Psychol. 2015, 12, 101–114. [Google Scholar] [CrossRef]
- Wang, Y.; Zlatanova, S.; Yan, J.; Huang, Z.; Cheng, Y. Exploring the relationship between spatial morphology characteristics and scenic beauty preference of landscape open space unit by using point cloud data. Environ. Plan. B Urban Anal. City Sci. 2020, 48, 1822–1840. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, T.; Sasaki, K.; Uehara, M.; Jin, Y.; Qin, L. The spatial cognition of a forest landscape and its relationship with tourist viewing intention in different walking passage stages. Urban For. Urban Green. 2021, 58, 126975. [Google Scholar] [CrossRef]
- Yan, J.; Diakité, A.A.; Zlatanova, S. An extraction approach of the top-bounded space formed by buildings for pedestrian navigation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4. [Google Scholar] [CrossRef] [Green Version]
- Parisien, M.; Peters, V.S.; Wang, Y.; Little, J.M.; Bosch, E.M.; Stocks, B.J. Spatial patterns of forest fires in Canada, 1980–1999. Int. J. Wildland Fire 2006, 15, 361–374. [Google Scholar] [CrossRef]
- Ode, Å.; Fry, G.; Tveit, M.S.; Messager, P.; Miller, D. Indicators of perceived naturalness as drivers of landscape preference. J. Environ. Manag. 2007, 90, 375–383. [Google Scholar] [CrossRef] [PubMed]
- Casey, E.S. The Edge(s) of Landscape: A Study in Liminology. In The Place of Landscape: Concepts, Contexts, Studies; The MIT Press: Cambridge, MA, USA, 2011; pp. 99–109. [Google Scholar]
- Jakobsen, P. Shrubs and Groundcover. In Landscape Design with Plants; CRC Press: Boca Raton, FL, USA, 1990. [Google Scholar]
- Wöhrle, R.E.; Wöhrle, H.J. Basics Designing with Plants; Birkhäuser: Basel, Switzerland, 2008. [Google Scholar]
- Amaral, L.; Ferreira, R.A.; Lisboa, G.; Longhi, S.J.; Watzlawick, L.F. Variabilidade espacial do Índice de Diversidade de Shannon-Wiener em Floresta Ombrófila Mista. Emilio Montero Cartelle 2013, 1961–1972. [Google Scholar]
- Zheng, S.; Meng, C.; Xue, J.; Wu, Y.; Liang, J.; Xin, L.; Zhang, L. UAV-based spatial pattern of three-dimensional green volume and its influencing factors in Lingang New City in Shanghai, China. Front. Earth Sci. 2021, 15, 543–552. [Google Scholar] [CrossRef]
- Svetnik, V. Random forest: A classification and regression tool for compound classification and QSAR modeling. J. Chem. Inf. Comput. Sci. 2003, 43, 1947–1958. [Google Scholar] [CrossRef]
- Zhi, X.; Ye, S.-J.; Zhong, B.; Sun, C.-X. BP neural network with rough set for short term load forecasting. Expert Syst. Appl. Int. J. 2009, 36, 273–279. [Google Scholar]
- Fathi, M.; Masnavi, M.R. Assessing Environmental Aesthetics of Roadside Vegetation and Scenic Beauty of Highway Landscape: Preferences and Perception of Motorists. Int. J. Environ. Res. 2014, 8, 941–952. [Google Scholar]
- Misgav, A. Visual preference of the public for vegetation groups in Israel. Landsc. Urban Plan. 2000, 48, 143–159. [Google Scholar] [CrossRef]
- Kaplan, S. Aesthetics, Affect, and Cognition: Environmental Preference from an Evolutionary Perspective. Environ. Behav. 2016, 19, 3–32. [Google Scholar] [CrossRef] [Green Version]
- Appleton, J. Prospects and Refuges Revisited. Landsc. J. 1984, 3, 91–103. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spatial Composition | Quantitative Indicators | Indicator Definition | Computational Formula |
|---|---|---|---|
| Horizontal interface | Accessible area ratio (AAR) | Representing the proportion of the area accessible to viewers of a spatial unit; the larger the value, the larger the area that can be accessed by viewers per unit area | AAR = Aa/Ab Aa stands for the accessible area of a spatial unit, and Ab the base area of a spatial unit |
| Eccentricity (E) | Representing the length and width of a spatial unit, the larger the value, the longer and narrower or shorter and wider the space. | E = Lmax/Lmin Lmax is the long axis length of the bottom surface of a spatial unit, while Lmin the broken axis length of the bottom surface of a spatial unit | |
| Spatial Shape Index (SSI) | Representing the complexity of the bottom surface of a spatial unit. The closer the index is to 1, the closer the bottom surface of the spatial unit is to a circle | p is the base perimeter of a spatial unit, and Ab the base area of the spatial unit | |
| Vegetation coverage (VC) | Proportion of vertical projection area of vegetation inside a spatial unit; the closer the value is to 1, the higher the green coverage rate in the spatial unit | VC = Sveg/Ab Sveg is the vertical projection area of vegetation in the spatial unit, and Ab the bottom area of the spatial unit | |
| Vertical interface | Average height of upper contour (hu) | Average height of upper contour of vertical interface of a spatial unit | hi is the height of the ith point of the contour on the vertical interface of the spatial unit |
| Average height of lower contour (hl) | Average height of lower contour of vertical interface of a spatial unit | hi′ is the height of the ith point of the lower contour on the vertical interface of the spatial unit | |
| Solid-space ratio (SVR) | Proportion of vertical projection area of vegetation in a spatial unit, the closer the value is to 1, the higher green coverage rate in the spatial unit | SVR = SP/(hmax × P) SP is the area occupied by the vertical interface of the entity elements, hmax the maximum height of the contour on the vertical interface, and P the underside perimeter of the spatial unit | |
| Contour fluctuation range (FR) | Representing the fluctuation of the upper contour of the entity elements of the vertical interface. The closer the value is to 1, the more uniform the contour height changes on the vertical interface of the spatial unit | FR = hmax/hu hmax is the maximum height of the contour on the vertical interface of the spatial unit, hu the average height of contour on a vertical surface of the spatial unit | |
| Fluctuation variance of upper contour (FVU) | Representing the intensity of fluctuation of the upper contour of the vertical interface. The larger the value, the more intense the fluctuation of the contour height on the vertical interface of the spatial unit | hi is the height of the ith point of the contour on the vertical interface of the spatial unit, hu the average height of contour on the vertical plane of the spatial unit | |
| Fluctuation variance of lower contour (FVL) | Representing the intensity of the fluctuation of the lower contour of the vertical interface. The larger the value, the more intense the fluctuation of the lower contour height on the vertical interface of the spatial unit | hi′ is the height of the ith point of the lower contour on the vertical interface of the spatial unit, hl the average height of lower contour on the vertical interface of the spatial unit. | |
| Three-dimensional space | Plant diversity Index (PDI) | Representing the richness of vegetation in a spatial unit; the greater the value, the more diverse the plants | Pi = Ni/N, Ni is the number of individuals of species i, i = 1, 2, 3, …S, N is the total number of individuals |
| 3D-green view index(3D-GVI) | Volume of tree cover in a spatial unit; the larger the value, the larger the proportion of plants in a spatial unit | 3D-GVI = Vp/(hmax × Ab) Vp is the volume of vegetation in a spatial unit, hmax the maximum height of contour on the vertical interface of the spatial unit, Ab the base area of the spatial unit | |
| Enclosure degree (ED) | Representing the enclosure of a spatial unit, and the higher the value, the higher the enclosure | ED = PU/P PU is the perimeter of the upper contour on the vertical interface of a spatial unit, P the underside perimeter of the spatial unit | |
| Comprehensive closure (CC) | Representing the combined enclosure of a spatial unit; the larger the value, the higher the enclosure of the spatial unit | CC = Sv/Ab Sv is the area of interface between the upper contour and lower contour on the vertical interface of the spatial unit, Ab the bottom area of the spatial unit |
| Models | Types | Functions |
|---|---|---|
| Linear | Least Squares | |
| Nonlinear | Exponential Function | |
| Polynomial Function | ||
| Machine Learning | Random Forest | R package randomForest |
| Neural Network | Back Propagation | R package nnet- |
| Models | Types | Functions/Parameters of Models | Number of Correct Grades | Pr |
|---|---|---|---|---|
| Linear | Least Squares | 22 | 70.97 | |
| Nonlinear | Exponential Function | 18 | 58.06 | |
| Polynomial Function | 15 | 48.39 | ||
| Machine Learning | Random Forest | Import Parameters: VC, SVR, hu, CC Import Labels: SBE/Grades of SBE Iterations: 1000 | 20 | 64.52 |
| Neural Network | Back Propagation | Import Parameters: VC, SVR, hu, CC Import Labels: SBE/Grades of SBE Iterations: 1000 Layers: 5 | 15 | 48.39 |
| Models | Types | R-Square | RMSE/Score |
|---|---|---|---|
| Linear | Least Squares | 0.332 | 64.774 |
| Nonlinear | Exponential Function | 0.187 | 119.517 |
| Polynomial Function | 0.257 | 117.800 | |
| Machine Learning | Random Forest | 0.405 | 63.311 |
| Neural Network | Back Propagation | 0.251 | 95.140 |
| Scene10 (419.39 m2) | 3D Laser Scanning Technology | Traditional Mapping |
|---|---|---|
| Assignment style | Equipment: handheld laser scanner (GEOSLAM ZEB-Horizon) Non-contact scanning, less interference from external factors Time Consumption: 12 min for a single person | Equipment: tape measure, perimeter, digital camera Contact measurement, greatly disturbed by external factors Time consumption: 2 h for 3 people |
| Data precision | Range: 100 m, Relative accuracy: 1.5–3 cm | More random |
| Results presentation | 3D model Data processing time: 28 min for a single person | 2D photos, reports Data processing time: 5 h for 2 people |
| Application prospect | Quantitative analysis of three-dimensional space morphology, microclimate simulation, auxiliary scheme design | 2D interface analysis |
| Number of Parameters | Models | Number of Correct Grades | Pr | R-Square |
|---|---|---|---|---|
| 14 | Linear | 22 | 70.97 | 0.332 |
| 17 (including 3 mixed parameters) | Linear | 22 | 70.97 | 0.392 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.; Sun, X.; Yu, W.; Wang, H. Analysis Model of the Relationship between Public Spatial Forms in Traditional Villages and Scenic Beauty Preference Based on LiDAR Point Cloud Data. Land 2022, 11, 1133. https://doi.org/10.3390/land11081133
Chen G, Sun X, Yu W, Wang H. Analysis Model of the Relationship between Public Spatial Forms in Traditional Villages and Scenic Beauty Preference Based on LiDAR Point Cloud Data. Land. 2022; 11(8):1133. https://doi.org/10.3390/land11081133
Chicago/Turabian StyleChen, Guodong, Xinyu Sun, Wenbo Yu, and Hao Wang. 2022. "Analysis Model of the Relationship between Public Spatial Forms in Traditional Villages and Scenic Beauty Preference Based on LiDAR Point Cloud Data" Land 11, no. 8: 1133. https://doi.org/10.3390/land11081133