
Routes Alternatives with Reduced Emissions: Large-Scale Statistical Analysis of Probe Vehicle Data in Lyon


Abstract
:1. Introduction
1.1. General Information and Background
1.2. Literature Review
1.3. Research Questions
2. Materials and Methods
2.1. Data Presentation
2.1.1. General Characteristics
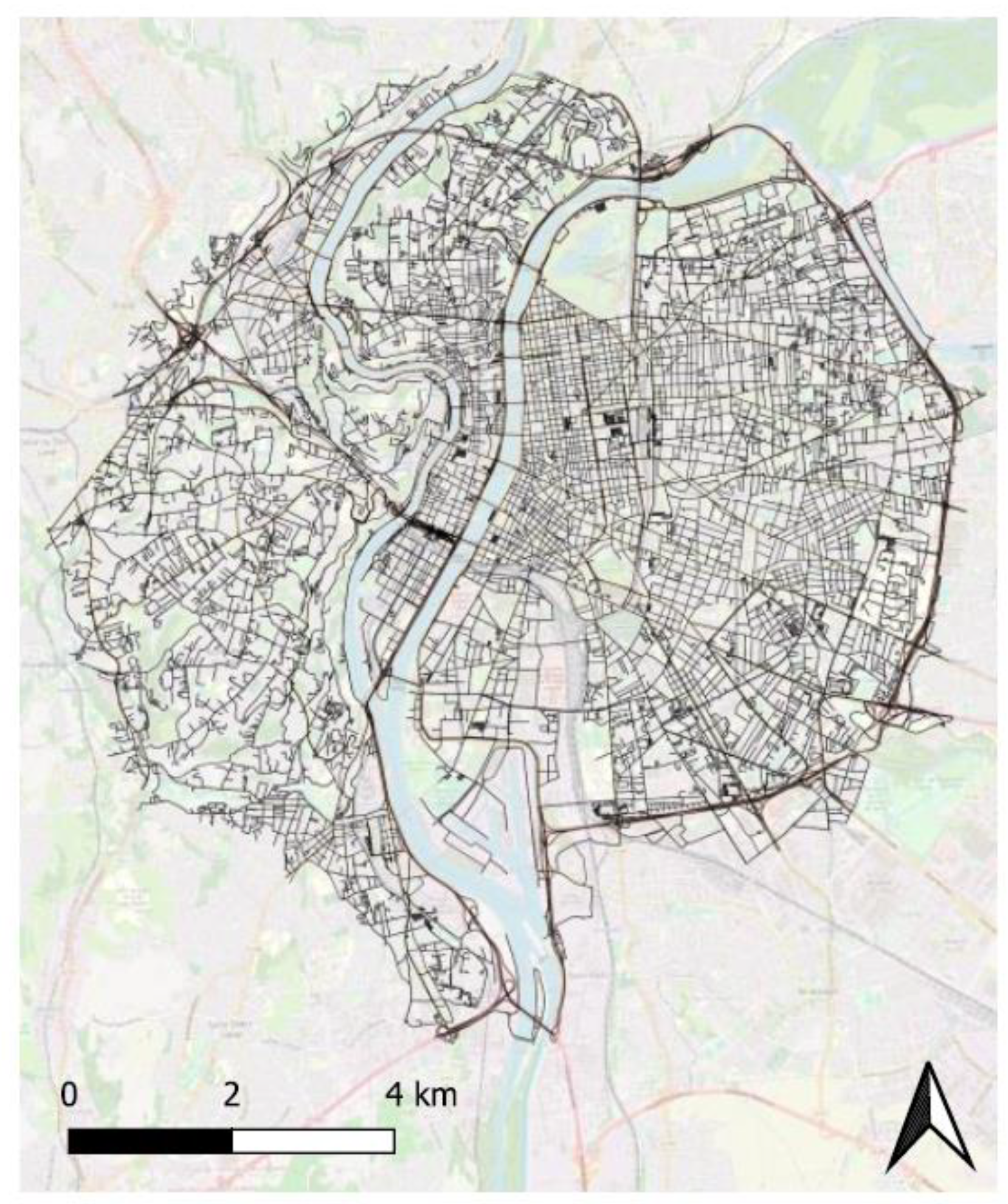
2.1.2. Geographic Site
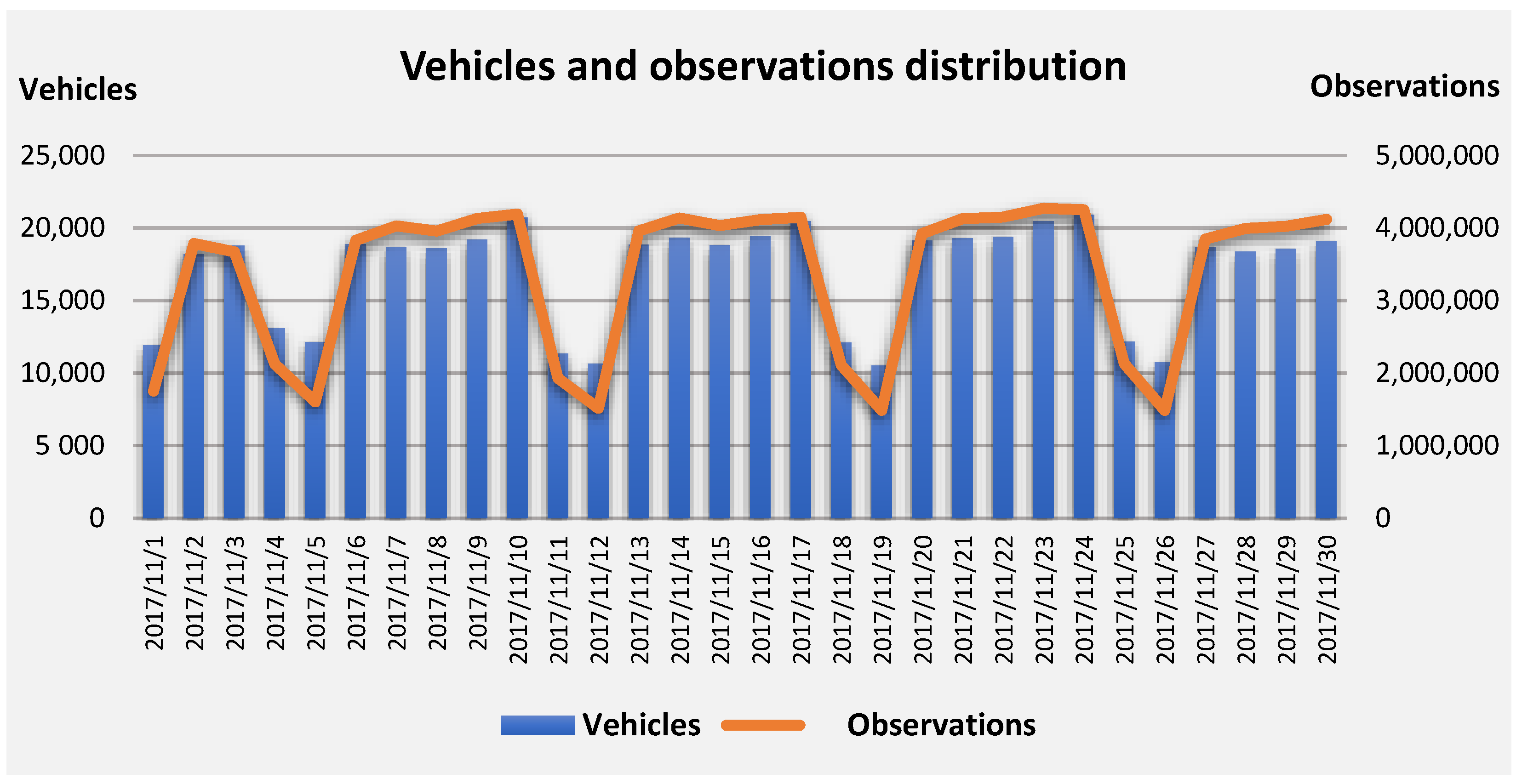
2.1.3. Data Studied
2.2. Experimental Protocol
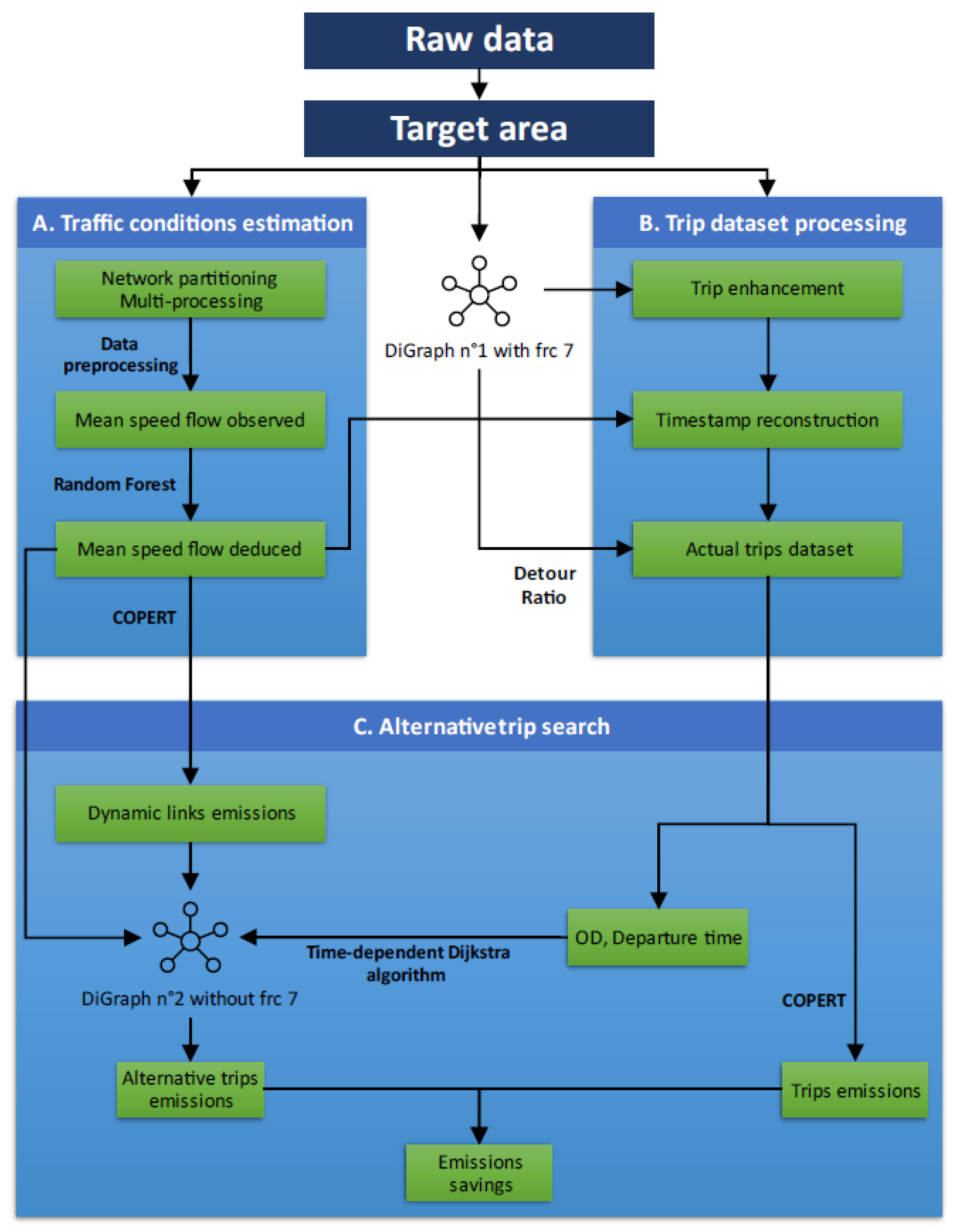
2.2.1. Overview
- A
- A supervised machine learning method is proposed to reconstitute traffic conditions in fifteen-minute intervals over all network links based on FCD observations;
- B
- A trip dataset processing is performed on trips with spatiotemporal gaps to maintain the original pattern of actual trips and increase the sampling frequency;
- C
- Time-dependent searching of eco-friendly trips is carried out for every OD of the preserved actual trips, optimizing one pollutant or multi-pollutants.
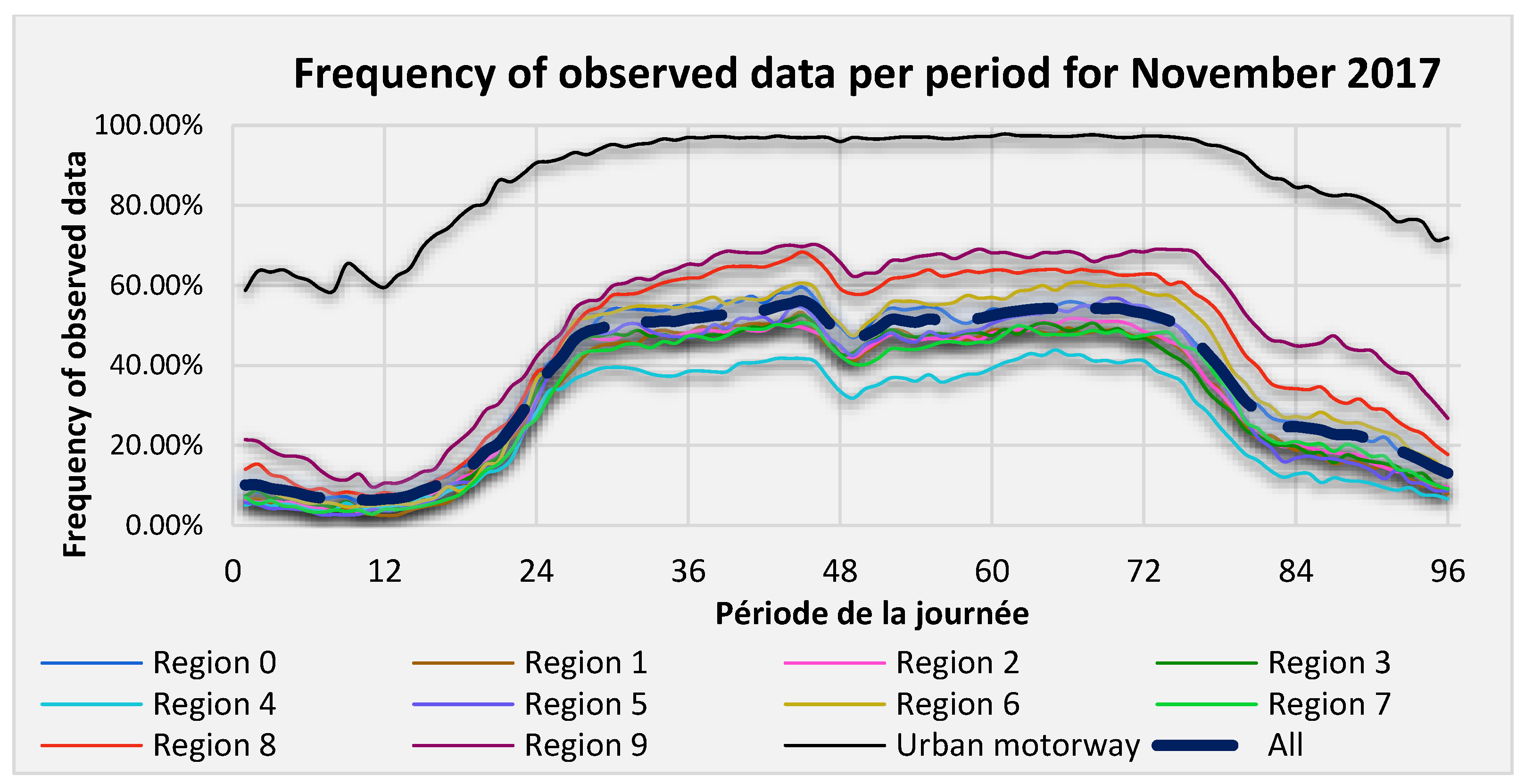
2.2.2. Traffic Condition Estimation
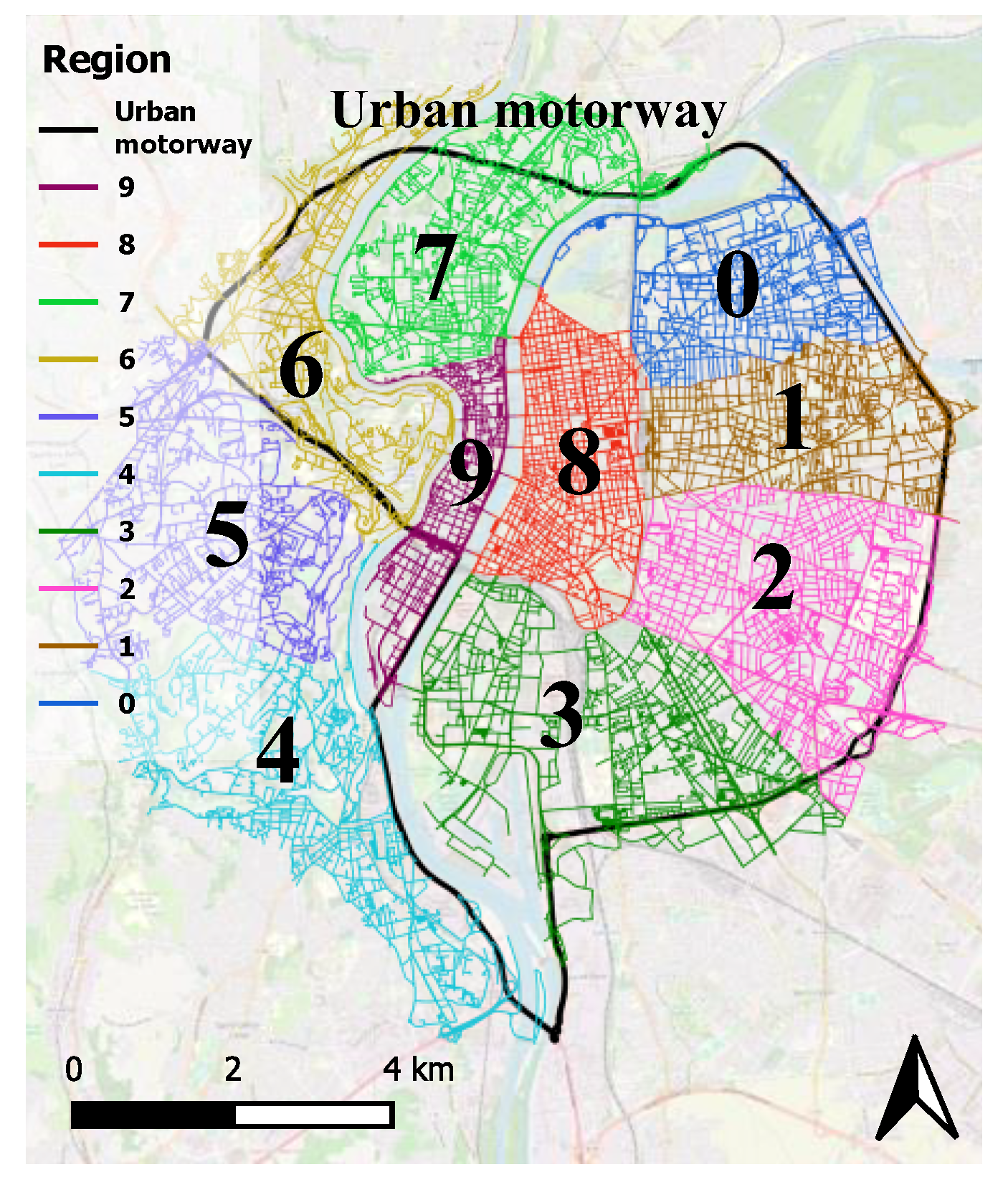
Network Partitioning
Data Preprocessing
- The mean speed flow is computed at a specific temporal scale for each link where vehicles are observed;
- A matrix is prepared that combines features and average link speed flow as the observed or missing target.
Random Forest
2.2.3. Trip Dataset Processing
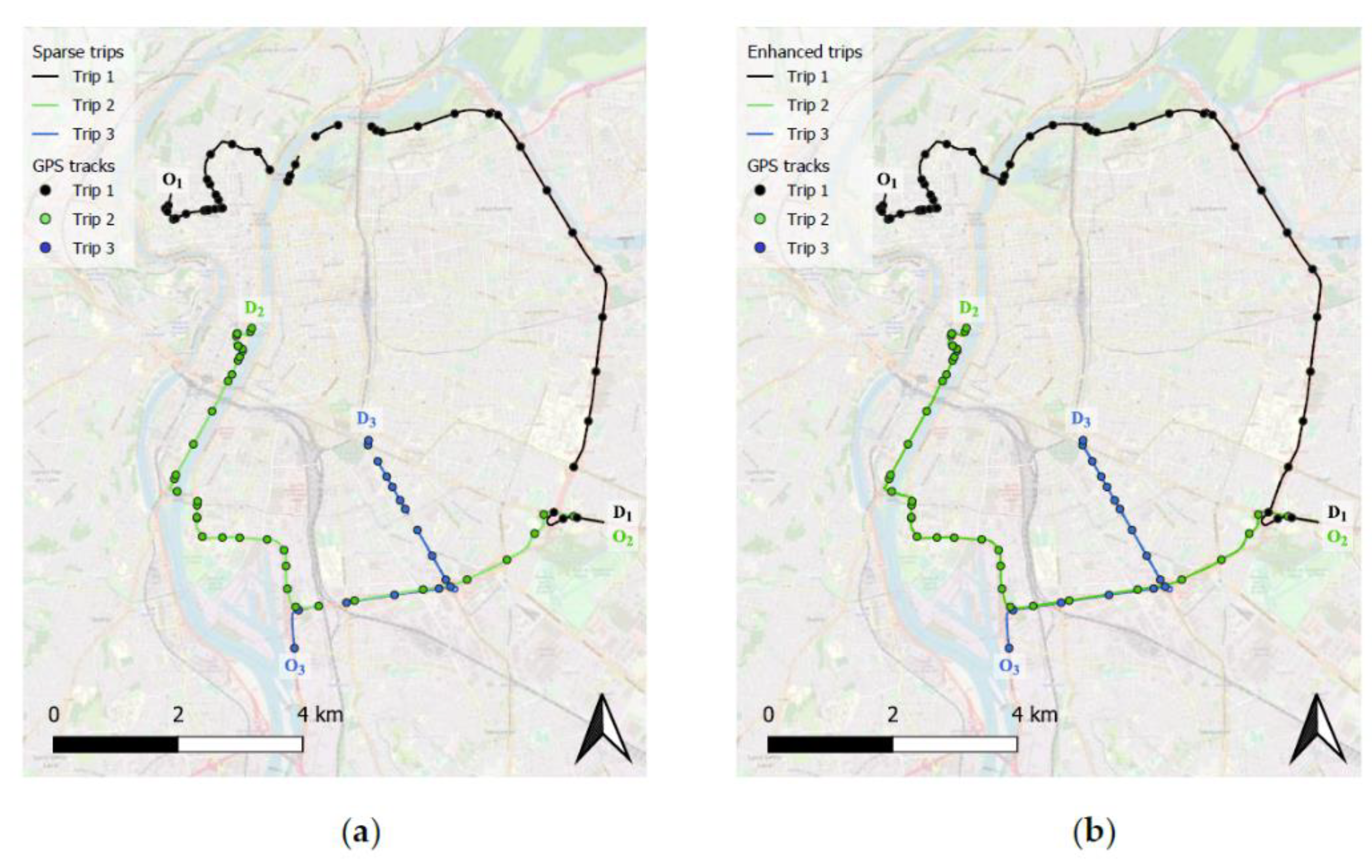
Trip Enhancement
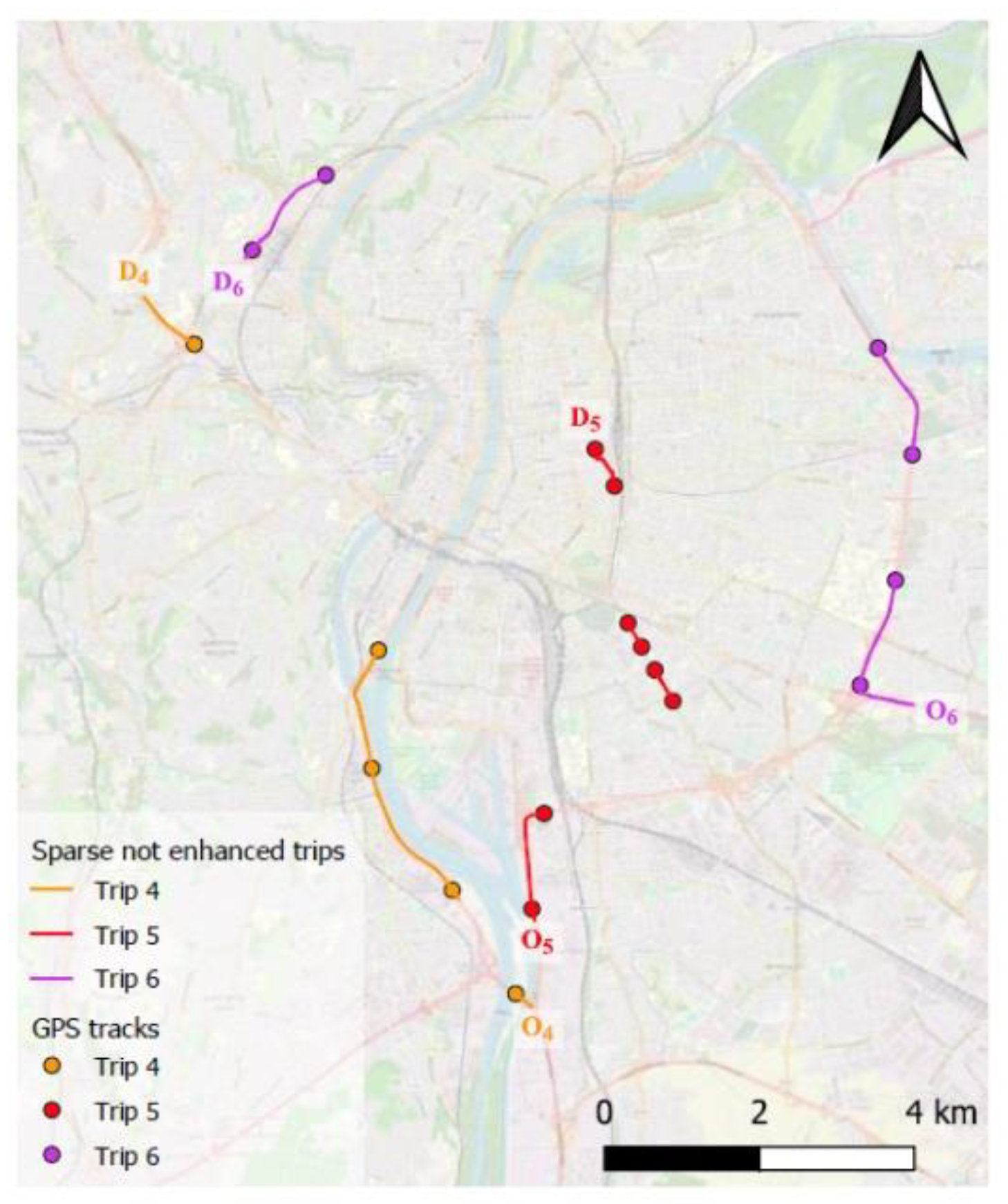
Trip Selection
2.2.4. Alternative Trip Search
Pollutants Emission Assessment
Eco-Routing Method
3. Results
3.1. Descriptive Analysis
3.1.1. Actual Trips
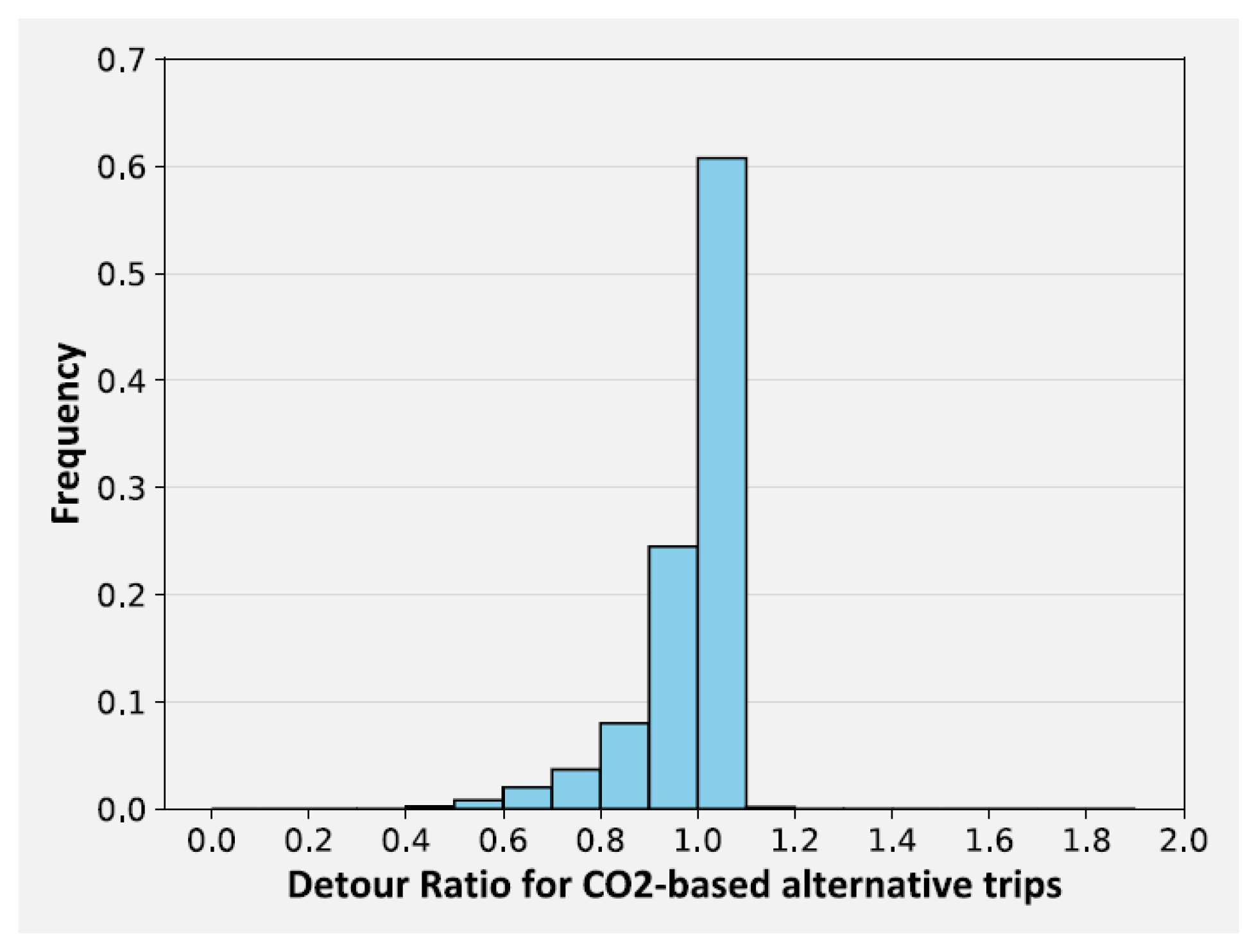
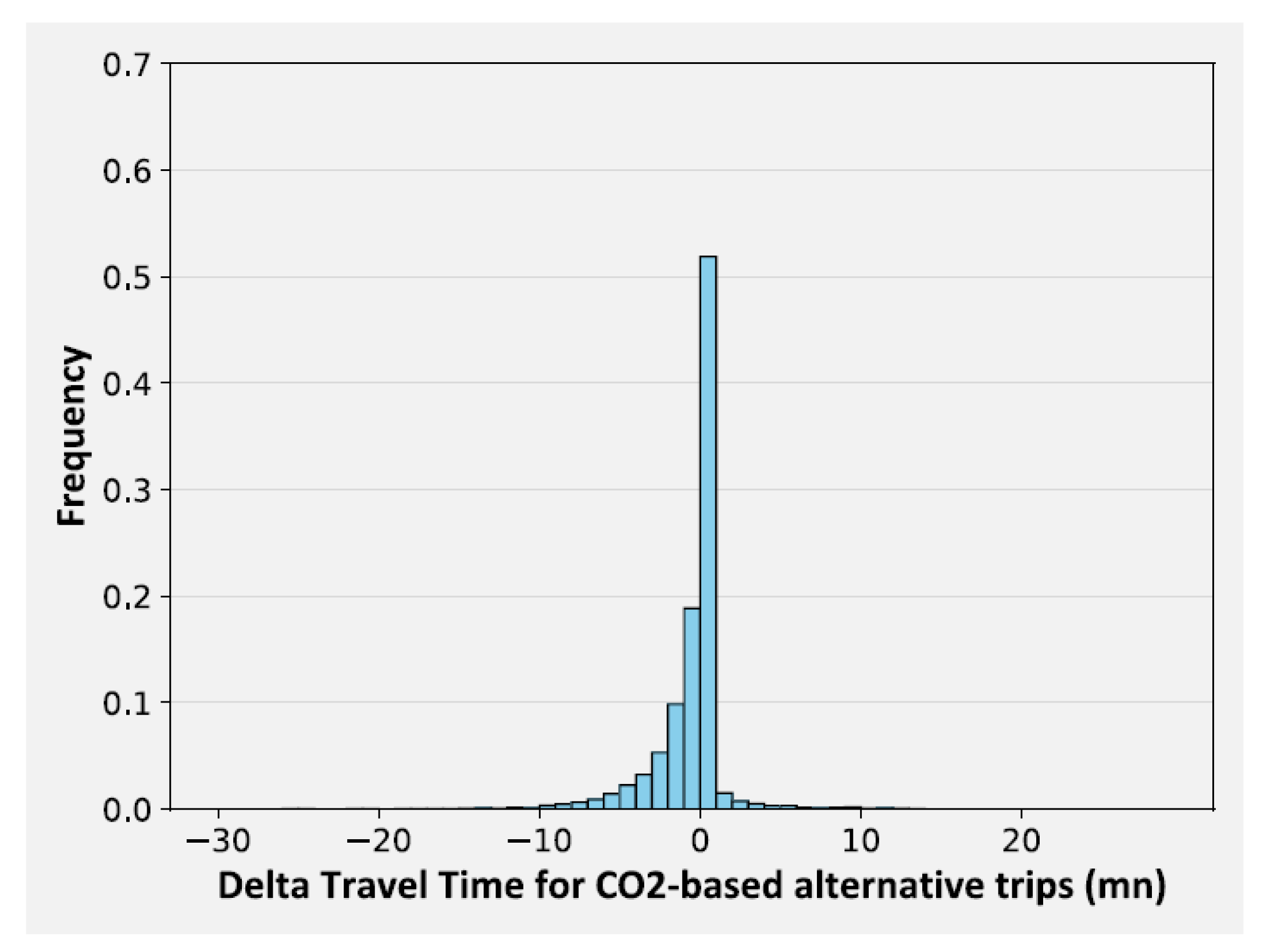
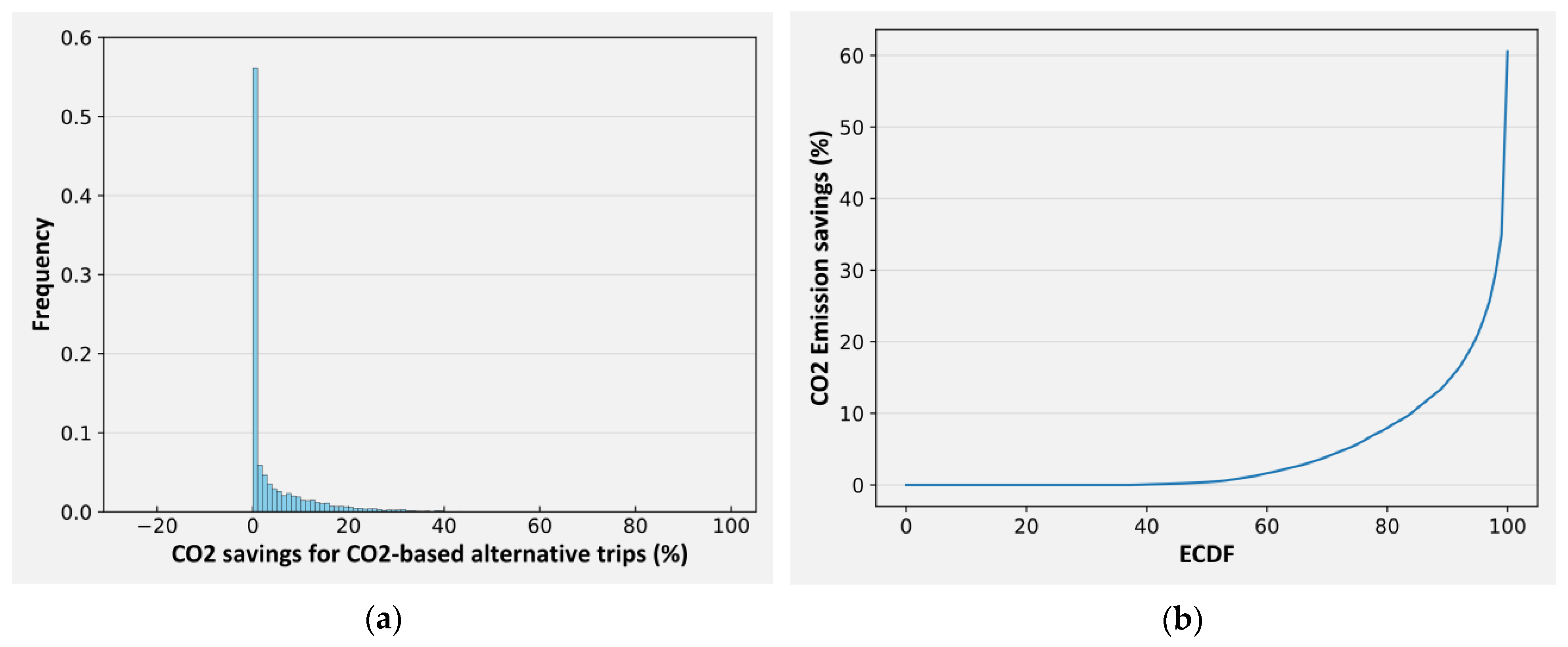
3.1.2. CO2-Based Alternative Trips
3.1.3. Shortest Path and Fastest Path
3.2. Global Analysis: Mean CO2 Emission Factor
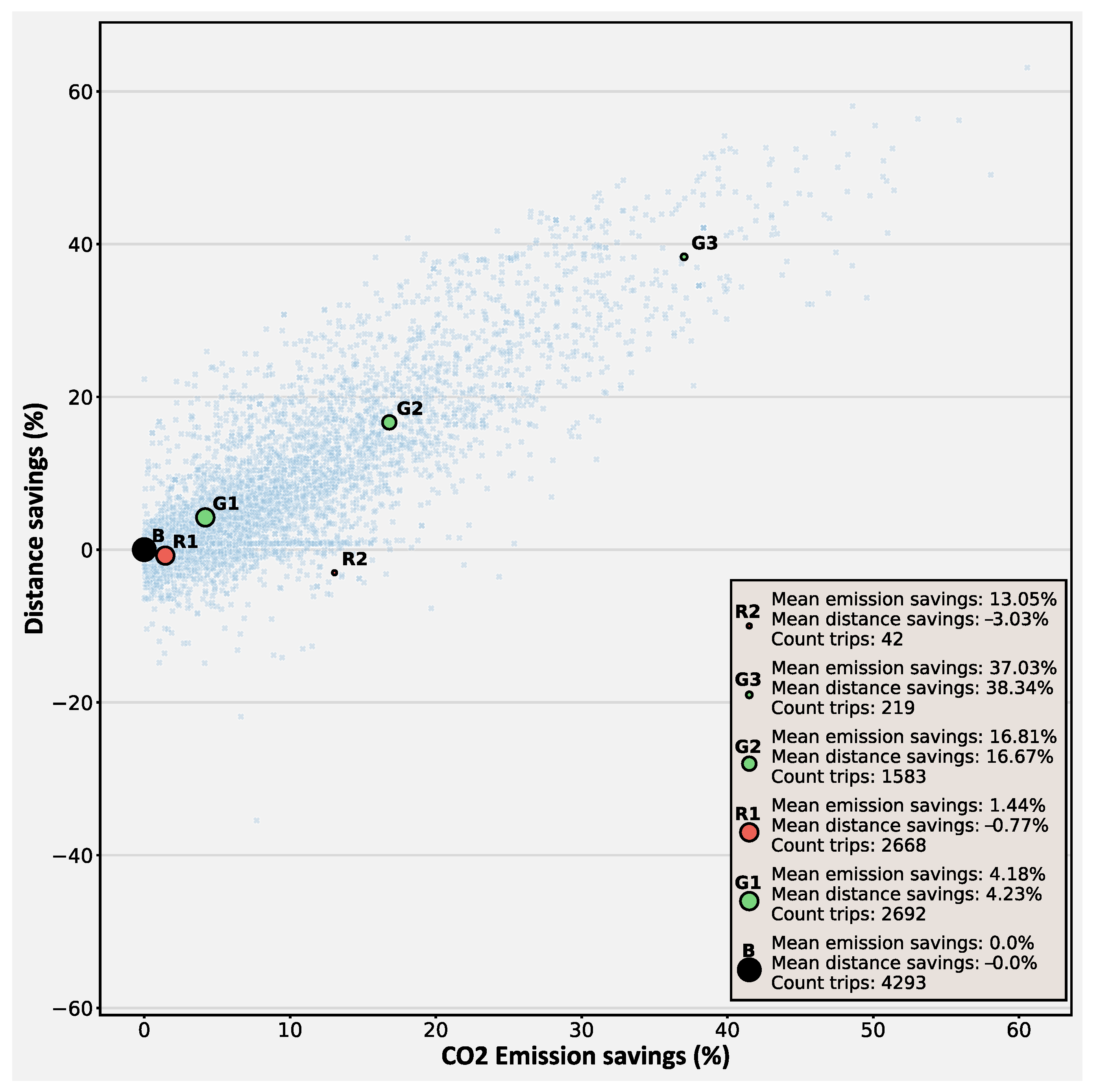
3.2.1. Assessment of CO2 Emission Savings
- A total of 4293 trips that do not have a more sustainable alternative regardless the TD, i.e., the black dot;
- A total of 4494 trips that have simultaneously a shorter and more sustainable alternative, i.e., the green dots;
- A total of 2710 trips that have both a longer and more sustainable alternative, i.e., the red dots.
3.2.2. Assessment of Other Pollutants
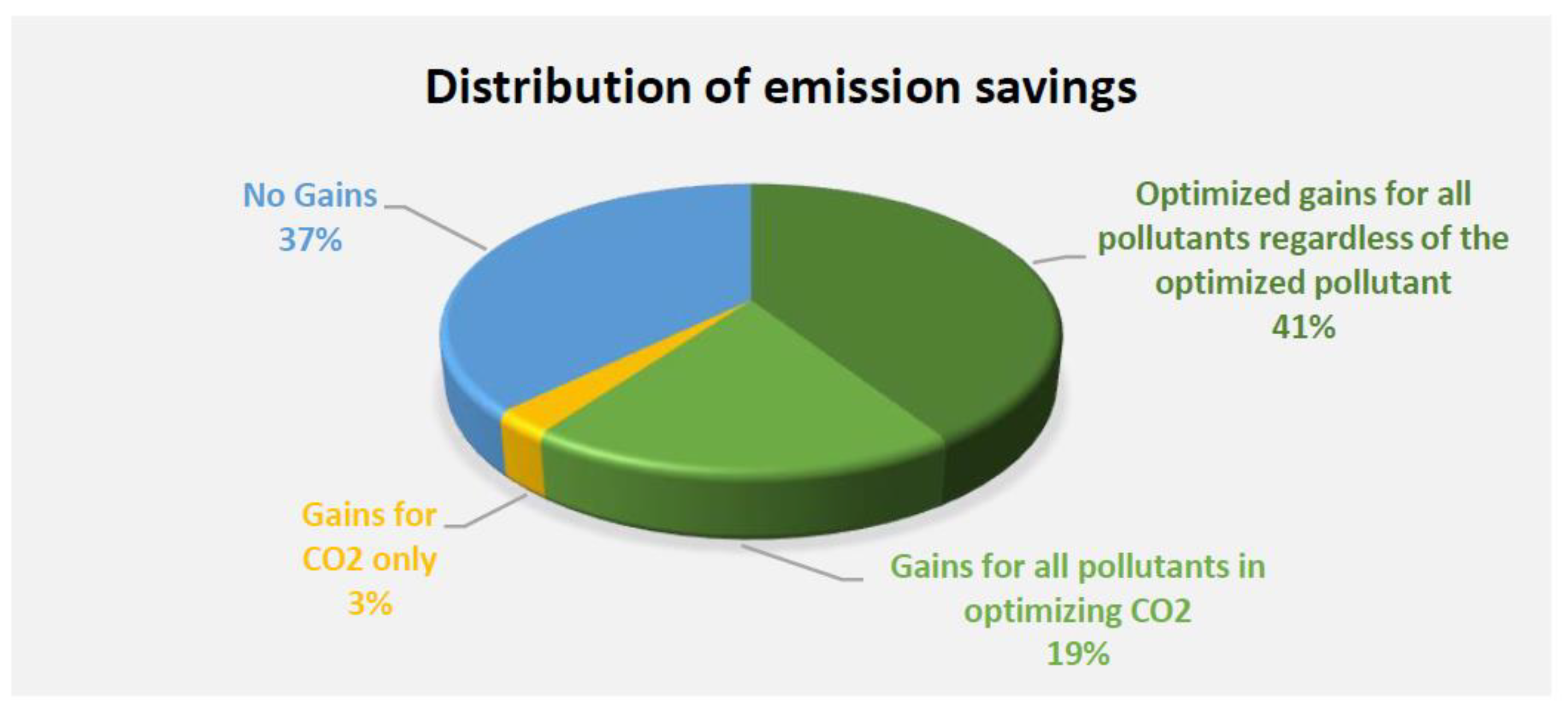
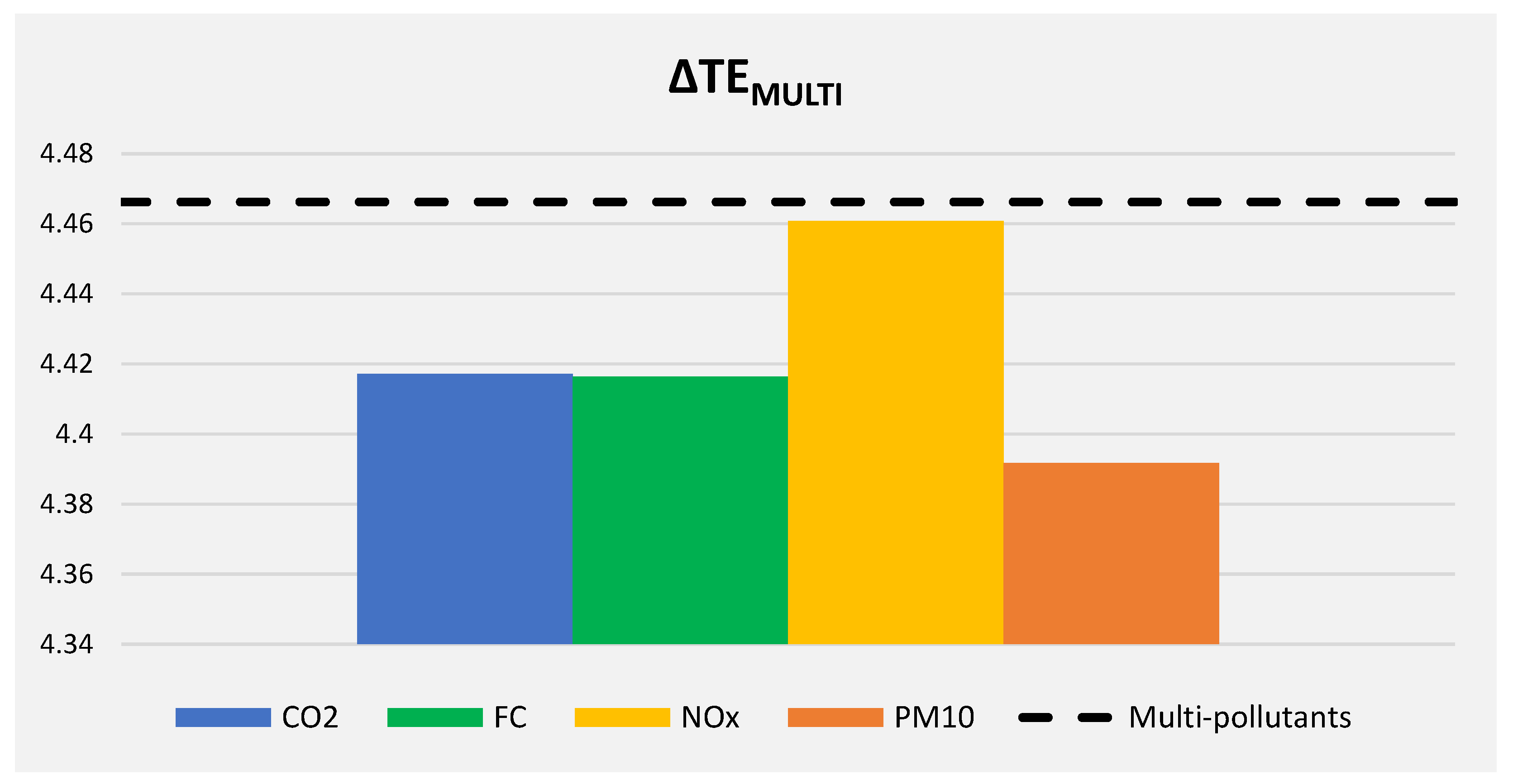
3.2.3. Assessment of Multi-Pollutant Criterion
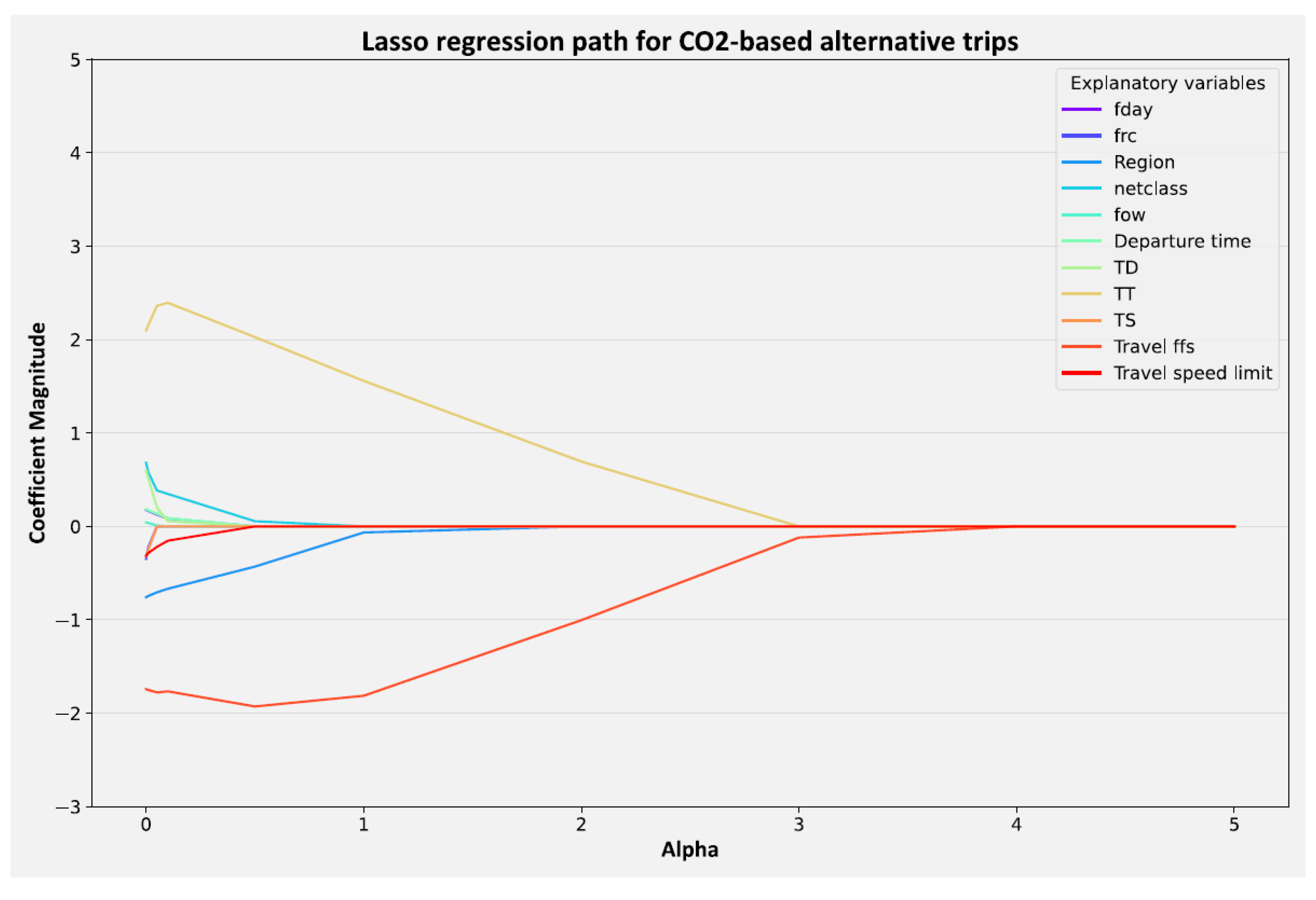
3.2.4. Explanatory Variables
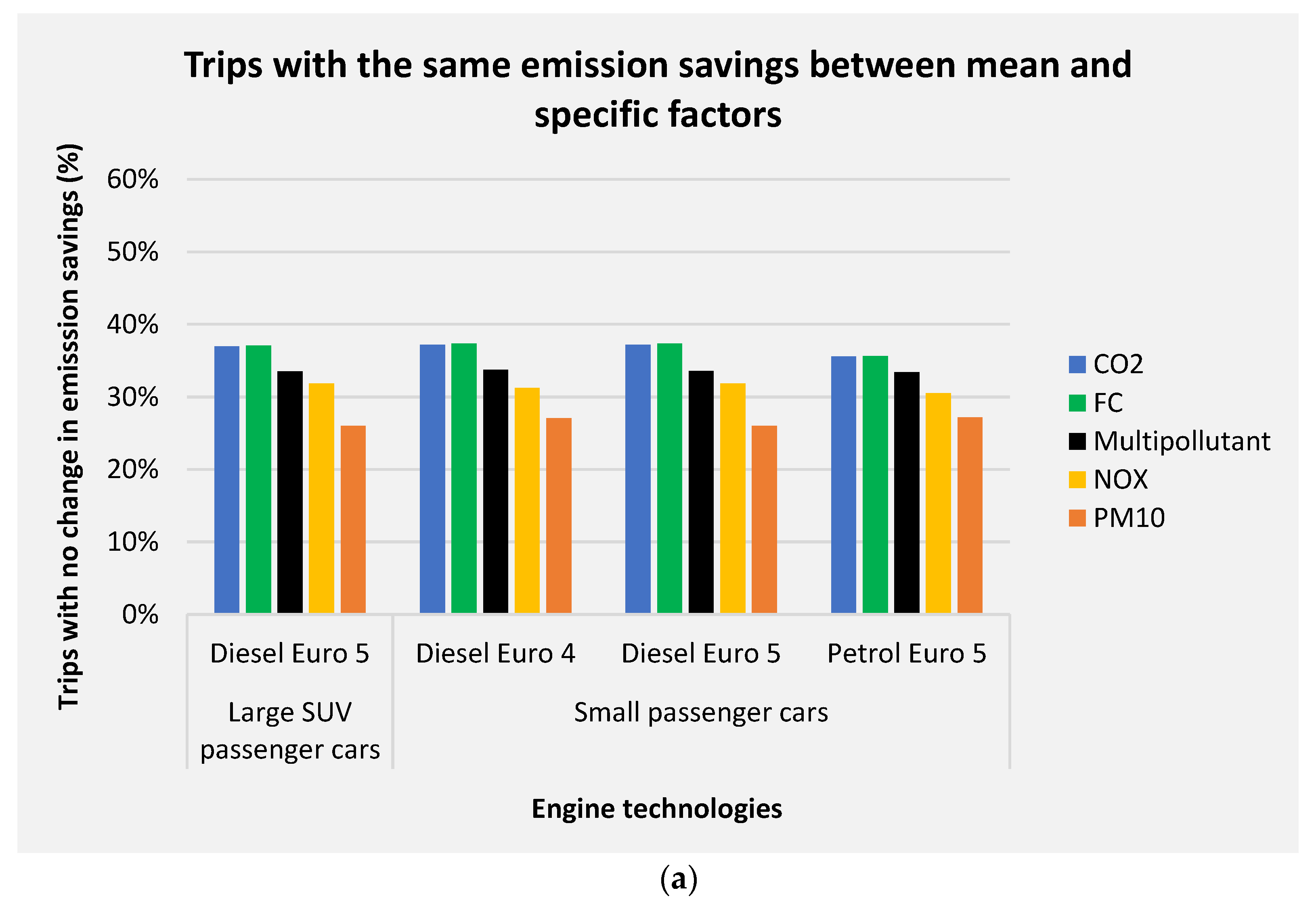
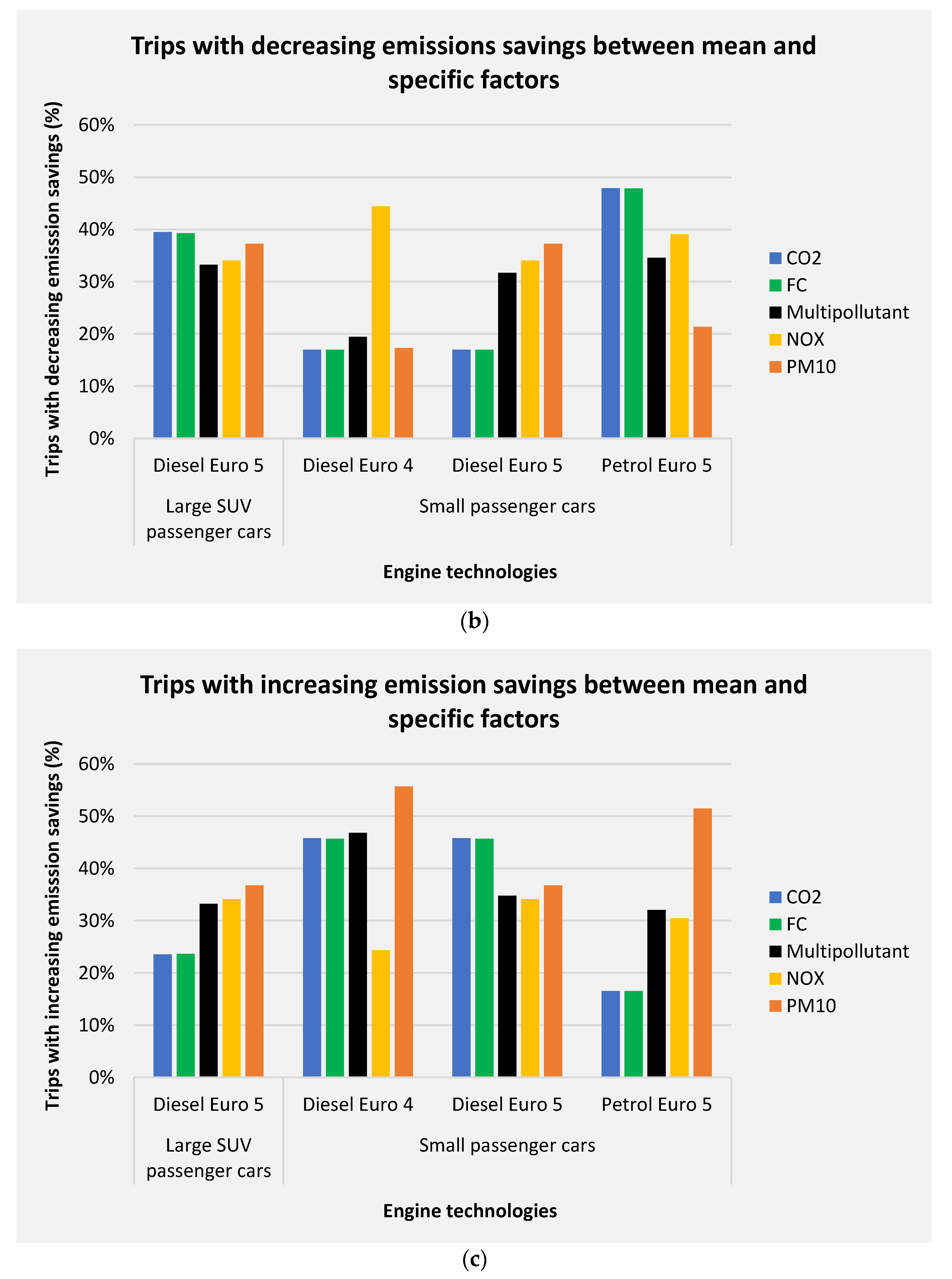
3.3. Investigating the Influence of the Emission Factor
Emission Savings Analysis
4. Discussion
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Agency for Research on Cancer (IARC). Air Pollution and Cancer; IARC Scientific: Lyon, France, 2013; ISBN 978-92-832-2166-1.
- International Agency for Research on Cancer (IARC). IARC Monographs on the Evaluation of Carcinogenic Risks to Humans. In Outdoor Air Pollution; IARC: Lyon, France, 2015; ISBN 978-92-832-0175-5. [Google Scholar]
- Van Zelm, R.; Preiss, P.; van Goethem, T.; Dingenen, R.V.; Huijbregts, M. Regionalized Life Cycle Impact Assessment of Air Pollution on the Global Scale: Damage to Human Health and Vegetation. Atmos. Environ. 2016, 134, 129–137. [Google Scholar] [CrossRef] [Green Version]
- Rai, P.K. Impacts of Particulate Matter Pollution on Plants: Implications for Environmental Biomonitoring. Ecotoxicol. Environ. Saf. 2016, 129, 120–136. [Google Scholar] [CrossRef] [PubMed]
- Popek, R.; Przybysz, A.; Gawrońska, H.; Klamkowski, K.; Gawroński, S.W. Impact of Particulate Matter Accumulation on the Photosynthetic Apparatus of Roadside Woody Plants Growing in the Urban Conditions. Ecotoxicol. Environ. Saf. 2018, 163, 56–62. [Google Scholar] [CrossRef] [PubMed]
- Pachauri, R.K.; Allen, M.R.; Barros, V.R.; Broome, J.; Cramer, W.; Christ, R.; Church, J.A.; Clarke, L.; Dahe, Q.; Dasgupta, P.; et al. Climate Change 2014: Synthesis Report; Intergovernmental Panel on Climate Change: Geneva, Switzerland, 2015; ISBN 978-92-9169-143-2. [Google Scholar]
- Monks, P.S.; Archibald, A.T.; Colette, A.; Cooper, O.; Coyle, M.; Derwent, R.; Fowler, D.; Granier, C.; Law, K.S.; Mills, G.E.; et al. Tropospheric Ozone and Its Precursors from the Urban to the Global Scale from Air Quality to Short-Lived Climate Forcer. Atmos. Chem. Phys. 2015, 15, 8889–8973. [Google Scholar] [CrossRef] [Green Version]
- World Health Organization. Compendium of WHO and Other UN Guidance on Health and Environment; World Health Organization: Geneva, Switzerland, 2021. [Google Scholar]
- Shang, J.; Zheng, Y.; Tong, W.; Chang, E.; Yu, Y. Inferring Gas Consumption and Pollution Emission of Vehicles throughout a City. In Proceedings of the 20th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 24–27 August 2014; ACM: New York, NY, USA, 2014; pp. 1027–1036. [Google Scholar]
- Macedo, E.; Tomás, R.; Fernandes, P.; Coelho, M.C.; Bandeira, J.M. Quantifying Road Traffic Emissions Embedded in a Multi-Objective Traffic Assignment Model. Transp. Res. Procedia 2020, 47, 648–655. [Google Scholar] [CrossRef]
- Hausberger, S.; Rodler, J.; Sturm, P.; Rexeis, M. Emission Factors for Heavy-Duty Vehicles and Validation by Tunnel Measurements. Atmos. Environ. 2003, 37, 5237–5245. [Google Scholar] [CrossRef]
- Zallinger, M.S.; Le Anh, T. Improving an Instantaneous Emission Model for Passenger Cars. In Proceedings of the 14th Symposium Transport and Air Pollution; Verlag der Technischen Universität Graz: Graz, Austria, 2005; Volume 85/I, pp. 166–167. [Google Scholar]
- Barth, M.; An, F.; Younglove, T.; Scora, G.; Levine, C.; Ross, M.; Wenzel, T.P. Development of a Comprehensive Modal Emissions Model. Transp. Res. Rec. J. Transp. Res. Board 2000, 1587, 52–62. [Google Scholar]
- AVL. Vehicle Driveline Simulation. Available online: https://www.avl.com/cruise (accessed on 2 January 2022).
- Tu, R.; Kamel, I.; Wang, A.; Abdulhai, B.; Hatzopoulou, M. Development of a Hybrid Modelling Approach for the Generation of an Urban On-Road Transportation Emission Inventory. Transp. Res. Part D Transp. Environ. 2018, 62, 604–618. [Google Scholar] [CrossRef]
- Lejri, D.; Can, A.; Schiper, N.; Leclercq, L. Accounting for Traffic Speed Dynamics When Calculating COPERT and PHEM Pollutant Emissions at the Urban Scale. Transp. Res. Part D Transp. Environ. 2018, 63, 588–603. [Google Scholar] [CrossRef] [Green Version]
- Boulter, P.; McCrae, I. ARTEMIS: Assessment and Reliability of Transport Emission Models and Inventory Systems—Final Report. In TRL Published Project Report; TRL: Crowthorne, UK, 2007. [Google Scholar]
- Hausberger, S.; Rexeis, M.; Zallinger, M.; Luz, R. Emission Factors from the Model PHEM for the HBEFA Version 3; Report Nr. I-20/2009; Institute for Internal Combustion Engines and Thermodynamics, Graz Uniervisty of Technology: Graz, Austria, 2009. [Google Scholar]
- Ntziachristos, L.; Gkatzoflias, D.; Kouridis, C.; Samaras, Z. COPERT: A European Road Transport Emission Inventory Model. In Proceedings of the Information Technologies in Environmental Engineering; Athanasiadis, I.N., Rizzoli, A.E., Mitkas, P.A., Gómez, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 491–504. [Google Scholar]
- Rodriguez-Rey, D.; Guevara, M.; Linares, M.P.; Casanovas, J.; Salmerón, J.; Soret, A.; Jorba, O.; Tena, C.; García-Pando, C.P. A Coupled Macroscopic Traffic and Pollutant Emission Modelling System for Barcelona. Transp. Res. Part D Transp. Environ. 2021, 92, 102725. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Armoogum, J.; Madre, J.-L.; Garcia, C. Reviewing Trip Purpose Imputation in GPS-Based Travel Surveys. J. Traffic Transp. Eng. Engl. Ed. 2020, 7, 395–412. [Google Scholar] [CrossRef]
- Ashbrook, D.; Starner, T. Using GPS to Learn Significant Locations and Predict Movement across Multiple Users. Pers. Ubiquitous Comput. 2003, 7, 275–286. [Google Scholar] [CrossRef]
- Lin, M.; Hsu, W.-J. Mining GPS Data for Mobility Patterns: A Survey. Pervas. Mob. Comput. 2014, 12, 1–16. [Google Scholar] [CrossRef]
- D’Andrea, E.; Marcelloni, F. Detection of Traffic Congestion and Incidents from GPS Trace Analysis. Expert Syst. Appl. 2017, 73, 43–56. [Google Scholar] [CrossRef]
- Erdelić, T.; Carić, T.; Erdelić, M.; Tišljarić, L.; Turković, A.; Jelušić, N. Estimating Congestion Zones and Travel Time Indexes Based on the Floating Car Data. Comput. Environ. Urban Syst. 2021, 87, 101604. [Google Scholar] [CrossRef]
- Castro, P.S.; Zhang, D.; Li, S. Urban Traffic Modelling and Prediction Using Large Scale Taxi GPS Traces. In Proceedings of the Pervasive Computing; Kay, J., Lukowicz, P., Tokuda, H., Olivier, P., Krüger, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 57–72. [Google Scholar]
- Seppecher, M.; Leclercq, L.; Furno, A.; Lejri, D.; da Rocha, T.V. Estimation of Urban Zonal Speed Dynamics from User-Activity-Dependent Positioning Data and Regional Paths. Transp. Res. Part C Emerg. Technol. 2021, 129, 103183. [Google Scholar] [CrossRef]
- Du, J.; Aultman-Hall, L. Increasing the Accuracy of Trip Rate Information from Passive Multi-Day GPS Travel Datasets: Automatic Trip End Identification Issues. Transp. Res. Part A Policy Pract. 2007, 41, 220–232. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, F.-Y.; Wang, K.; Lin, W.-H.; Xu, X.; Chen, C. Data-Driven Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1624–1639. [Google Scholar] [CrossRef]
- Leclercq, L.; Chiabaut, N.; Trinquier, B. Macroscopic Fundamental Diagrams: A Cross-Comparison of Estimation Methods. Transp. Res. Part B Methodol. 2014, 62, 1–12. [Google Scholar] [CrossRef]
- Barth, M.; Boriboonsomsin, K.; Vu, A. Environmentally-Friendly Navigation. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Bellevue, WA, USA, 30 September–3 October 2007; pp. 684–689. [Google Scholar]
- Ahn, K.; Rakha, H.A. Network-Wide Impacts of Eco-Routing Strategies: A Large-Scale Case Study. Transp. Res. Part D Transp. Environ. 2013, 25, 119–130. [Google Scholar] [CrossRef]
- Zeng, W.; Miwa, T.; Morikawa, T. Prediction of Vehicle CO2 Emission and Its Application to Eco-Routing Navigation. Transp. Res. Part C Emerg. Technol. 2016, 68, 194–214. [Google Scholar] [CrossRef]
- Sun, J.; Liu, H.X. Stochastic Eco-Routing in a Signalized Traffic Network. Transp. Res. Part C Emerg. Technol. 2015, 59, 32–47. [Google Scholar] [CrossRef]
- Wang, J.; Elbery, A.; Rakha, H.A. A Real-Time Vehicle-Specific Eco-Routing Model for On-Board Navigation Applications Capturing Transient Vehicle Behavior. Transp. Res. Part C Emerg. Technol. 2019, 104, 1–21. [Google Scholar] [CrossRef]
- Ericsson, E.; Larsson, H.; Brundell-Freij, K. Optimizing Route Choice for Lowest Fuel Consumption—Potential Effects of a New Driver Support Tool. Transp. Res. Part C Emerg. Technol. 2006, 14, 369–383. [Google Scholar] [CrossRef]
- Gazis, A.; Fontes, T.; Bandeira, J.; Pereira, S.; Coelho, M.C. Integrated Computational Methods for Traffic Emissions Route Assessment. In Proceedings of the 5th ACM SIGSPATIAL International Workshop on Computational Transportation Science—IWCTS ’12, Redondo Beach, CA, USA, 6 November 2012; ACM Press: Redondo Beach, CA, USA, 2012; pp. 8–13. [Google Scholar]
- Yao, E.; Song, Y. Study on Eco-Route Planning Algorithm and Environmental Impact Assessment. J. Intell. Transp. Syst. 2013, 17, 42–53. [Google Scholar] [CrossRef]
- Zeng, W.; Miwa, T.; Morikawa, T. Application of the Support Vector Machine and Heuristic K-Shortest Path Algorithm to Determine the Most Eco-Friendly Path with a Travel Time Constraint. Transp. Res. Part D Transp. Environ. 2017, 57, 458–473. [Google Scholar] [CrossRef]
- Zeng, W.; Miwa, T.; Morikawa, T. Eco-Routing Problem Considering Fuel Consumption and Probabilistic Travel Time Budget. Transp. Res. Part D Transp. Environ. 2020, 78, 102219. [Google Scholar] [CrossRef]
- Sugawara, S.; Niemeier, D.A. How Much Can Vehicle Emissions Be Reduced? Exploratory Analysis of an Upper Boundary Using an Emissions-Optimized Trip Assignment. Transp. Res. Rec. 2002, 1815, 29–37. [Google Scholar] [CrossRef]
- Guo, L.; Huang, S.; Sadek, A.W. An Evaluation of Environmental Benefits of Time-Dependent Green Routing in the Greater Buffalo–Niagara Region. J. Intell. Transp. Syst. 2013, 17, 18–30. [Google Scholar] [CrossRef]
- Bandeira, J.M.; Fernandes, P.; Fontes, T.; Pereira, S.R.; Khattak, A.J.; Coelho, M.C. Exploring Multiple Eco-Routing Guidance Strategies in a Commuting Corridor. Int. J. Sustain. Transp. 2017, 12, 53–65. [Google Scholar] [CrossRef]
- Rakha, H.A.; Ahn, K.; Moran, K. Integration Framework for Modeling Eco-Routing Strategies: Logic and Preliminary Results. Int. J. Transp. Sci. Technol. 2012, 1, 259–274. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A Note on Two Problems in Connexion with Graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Lin, I.; He, R.; Kornhauser, A.L. Estimating Nationwide Link Speed Distribution Using Probe Position Data. J. Intell. Transp. Syst. 2008, 12, 29–37. [Google Scholar] [CrossRef]
- Zeng, W.; Miwa, T.; Morikawa, T. Exploring Trip Fuel Consumption by Machine Learning from GPS and CAN Bus Data. J. East. Asia Soc. Transp. Stud. 2015, 11, 906–921. [Google Scholar]
- INSEE. Population en 2017 Recensement de la Population. Available online: https://www.insee.fr/fr/statistiques/4515539?sommaire=4516122 (accessed on 10 January 2022).
- SDES. Données et Etudes Statistiques. Available online: https://www.statistiques.developpement-durable.gouv.fr/ (accessed on 10 January 2022).
- Métropole de Lyon. Ponts de la Métropole de Lyon. Available online: https://www.data.gouv.fr/fr/datasets/ponts-de-la-metropole-de-lyon/ (accessed on 30 September 2021).
- Ho, T.K. Random Decision Forests. In Proceedings of the Third International Conference on Document Analysis and Recognition, Montreal, QC, Canada, 14–15 August 1995; IEEE Computer Society: Washington, DC, USA, 1995; Volume 1, p. 278. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Paipuri, M.; Xu, Y.; González, M.C.; Leclercq, L. Estimating MFDs, Trip Lengths and Path Flow Distributions in a Multi-Region Setting Using Mobile Phone Data. Transp. Res. Part C Emerg. Technol. 2020, 118, 102709. [Google Scholar] [CrossRef]
- Laña, I.; Olabarrieta, I.; Vélez, M.; Del Ser, J. On the Imputation of Missing Data for Road Traffic Forecasting: New Insights and Novel Techniques. Transp. Res. Part C Emerg. Technol. 2018, 90, 18–33. [Google Scholar] [CrossRef]
- Hagberg, A.A.; Schult, D.A.; Swart, P.J. Exploring Network Structure, Dynamics, and Function Using NetworkX; Los Alamos National Lab.: Los Alamos, NM, USA, 2008; p. 5. [Google Scholar]
- Borge, R.; de Miguel, I.; de la Paz, D.; Lumbreras, J.; Pérez, J.; Rodríguez, E. Comparison of Road Traffic Emission Models in Madrid (Spain). Atmos. Environ. 2012, 62, 461–471. [Google Scholar] [CrossRef] [Green Version]
- Samaras, C.; Ntziachristos, L.; Samaras, Z. COPERT Micro: A Tool to Calculate Vehicle Emissions in Urban Areas. In Energy and Environment; ISTE Ltd.: Washington, DC, USA, 2016; pp. 401–415. ISBN 978-1-78630-026-3. [Google Scholar]
- Samaras, C.; Tsokolis, D.; Toffolo, S.; Garcia-Castro, A.; Vock, C.; Ntziachristos, L.; Samaras, Z. Limits of Applicability of COPERT Model to Short Links and Congested Conditions. In Proceedings of the 20th International Transport and Air Pollution Conference, Graz, Asutria, 18–19 September 2014. [Google Scholar]
- Lejri, D.; Leclercq, L. Are Average Speed Emission Functions Scale-Free? Atmos. Environ. 2020, 224, 117324. [Google Scholar] [CrossRef]
- Tibshirani, R. Regression Shrinkage Selection via the LASSO. J. R. Stat. Soc. Ser. B 2011, 73, 273–282. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | RMSE (km/h) | R2 | ||||
|---|---|---|---|---|---|---|
| Median | Mean | Std | Median | Mean | Std | |
| 0 | 6.9 | 6.9 | 9.6 × 10−4 | 0.80 | 0.80 | 5.64 × 10−5 |
| 1 | 7.2 | 7.2 | 1.9 × 10−3 | 0.72 | 0.72 | 1.45 × 10−4 |
| 2 | 6.8 | 6.8 | 1.9 × 10−3 | 0.84 | 0.84 | 9.25 × 10−5 |
| 3 | 7.8 | 7.8 | 1.0 × 10−3 | 0.73 | 0.73 | 7.20 × 10−5 |
| 4 | 7.1 | 7.1 | 2.9 × 10−3 | 0.83 | 0.83 | 1.40 × 10−4 |
| 5 | 7.2 | 7.2 | 4.0 × 10−3 | 0.77 | 0.77 | 2.52 × 10−4 |
| 6 | 7.5 | 7.5 | 3.0 × 10−3 | 0.77 | 0.77 | 1.89 × 10−4 |
| 7 | 6.9 | 6.9 | 8.4 × 10−4 | 0.77 | 0.77 | 5.57 × 10−5 |
| 8 | 6.7 | 6.7 | 1.6 × 10−3 | 0.67 | 0.67 | 1.55 × 10−4 |
| 9 | 5.9 | 5.9 | 3.3 × 10−3 | 0.84 | 0.84 | 1.71 × 10−4 |
| Urban motorway | 3.8 | 3.8 | 3.3 × 10−3 | 0.96 | 0.96 | 6.71 × 10−5 |
| Statistics | TD (km) | TT (min) | TS (km/h) | TE CO2 (kg) | TE FC (litres) | TE NOx (g) | TE PM10 (g) | TE Multi (No Unit) |
|---|---|---|---|---|---|---|---|---|
| Mean | 8.33 | 11.78 | 51.14 | 1.44 | 0.20 | 4.27 | 0.09 | 4.60 × 10−3 |
| Standard deviation | 3.68 | 5.68 | 17.85 | 0.58 | 0.08 | 1.74 | 0.04 | 1.87 × 10−3 |
| Minimum | 0.68 | 5.00 | 6.00 | 0.21 | 0.03 | 0.56 | 0.01 | 0.63 × 10−3 |
| 25th percentile | 5.52 | 7.60 | 35.31 | 1.00 | 0.14 | 2.94 | 0.06 | 3.18 × 10−3 |
| 50th percentile | 7.84 | 10.31 | 51.34 | 1.38 | 0.19 | 4.05 | 0.09 | 4.38 × 10−3 |
| 75th percentile | 11.96 | 14.51 | 68.21 | 1.88 | 0.26 | 5.66 | 0.12 | 6.09 × 10−3 |
| Maximum | 26.50 | 46.91 | 86.73 | 4.20 | 0.57 | 12.39 | 0.26 | 13.36 × 10−3 |
| Statistics | TD (km) | TT (min) | TS (km/h) | TE CO2 (kg) | DRSuP (No Unit) | ∆TT (min) |
|---|---|---|---|---|---|---|
| Mean | 7.99 | 11.09 | 50.41 | 1.37 | 0.96 | −0.69 |
| Standard deviation | 3.55 | 5.03 | 17.66 | 0.55 | 0.09 | 2.24 |
| Minimum | 0.68 | 2.46 | 6 | 0.20 | 0.37 | −25.73 |
| 25th percentile | 5.15 | 7.26 | 34.47 | 0.95 | 0.97 | −1.00 |
| 50th percentile | 7.63 | 10.02 | 50.43 | 1.30 | 1 | 0 |
| 75th percentile | 11.22 | 13.47 | 67.65 | 1.87 | 1 | 0 |
| Maximum | 18.55 | 43.94 | 86.13 | 3.19 | 1.35 | 13.40 |
| Statistics | TD (km) | TT (min) | TS (km/h) | TE CO2 (kg) | TE FC (litres) | TE NOx (g) | TE PM10 (g) | TE Multi (No Unit) |
|---|---|---|---|---|---|---|---|---|
| Mean | 7.88 | 13.02 | 44.76 | 1.42 | 0.19 | 4.16 | 0.09 | 4.50 × 10−3 |
| Standard deviation | 3.48 | 6.64 | 16.08 | 0.59 | 0.08 | 1.74 | 0.04 | 1.88 × 10−3 |
| Minimum | 0.68 | 2.36 | 6 | 0.20 | 0.03 | 0.56 | 0.01 | 0.63 × 10−3 |
| 25th percentile | 5.08 | 7.73 | 31.29 | 0.97 | 0.13 | 2.82 | 0.06 | 3.05 × 10−3 |
| 50th percentile | 7.59 | 11.88 | 42.52 | 1.33 | 0.18 | 3.93 | 0.08 | 4.24 × 10−3 |
| 75th percentile | 11.03 | 16.19 | 56.93 | 1.92 | 0.26 | 5.73 | 0.12 | 6.16 × 10−3 |
| Maximum | 16.57 | 53.92 | 86.13 | 3.58 | 0.49 | 10.09 | 0.21 | 11.1 × 10−3 |
| Statistics | TD (km) | TT (min) | TS (km/h) | TE CO2 (kg) | TE FC (litres) | TE NOx (g) | TE PM10 (g) | TE Multi (No Unit) |
|---|---|---|---|---|---|---|---|---|
| Mean | 8.42 | 10.53 | 53.00 | 1.42 | 0.19 | 4.21 | 0.09 | 4.54 × 10−3 |
| Standard deviation | 3.81 | 4.36 | 16.82 | 0.59 | 0.08 | 1.77 | 0.04 | 1.90 × 10−3 |
| Minimum | 0.68 | 2.36 | 9.41 | 0.20 | 0.03 | 0.56 | 0.01 | 0.63 × 10−3 |
| 25th percentile | 5.49 | 7.08 | 38.65 | 0.97 | 0.13 | 2.87 | 0.06 | 3.09 × 10−3 |
| 50th percentile | 7.86 | 9.84 | 53.28 | 1.34 | 0.18 | 3.96 | 0.08 | 4.27 × 10−3 |
| 75th percentile | 11.96 | 12.87 | 68.86 | 1.88 | 0.26 | 5.65 | 0.12 | 6.07 × 10−3 |
| Maximum | 28.10 | 35.52 | 86.73 | 4.48 | 0.61 | 13.28 | 0.29 | 14.27 × 10−3 |
| Pollutant | Trips for ∆TE > 5% | Trips for ∆TE > 10% | Trips for ∆TE > 20% |
|---|---|---|---|
| CO2 | 3089 (27%) | 1844 (16%) | 636 (5%) |
| FC | 3090 (27%) | 18461 (16%) | 635 (5%) |
| NOx | 3006 (26%) | 1774 (15%) | 650 (6%) |
| PM10 | 31501 (27%) | 1818 (16%) | 6821 (6%) |
| Multi-pollutants | 3067 (27%) | 1820 (16%) | 647 (6%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jayol, A.; Lejri, D.; Leclercq, L. Routes Alternatives with Reduced Emissions: Large-Scale Statistical Analysis of Probe Vehicle Data in Lyon. Atmosphere 2022, 13, 1681. https://doi.org/10.3390/atmos13101681
Jayol A, Lejri D, Leclercq L. Routes Alternatives with Reduced Emissions: Large-Scale Statistical Analysis of Probe Vehicle Data in Lyon. Atmosphere. 2022; 13(10):1681. https://doi.org/10.3390/atmos13101681
Chicago/Turabian StyleJayol, Alexandre, Delphine Lejri, and Ludovic Leclercq. 2022. "Routes Alternatives with Reduced Emissions: Large-Scale Statistical Analysis of Probe Vehicle Data in Lyon" Atmosphere 13, no. 10: 1681. https://doi.org/10.3390/atmos13101681