

Design of an Intermittent Herbicide Spray System for Open-Field Cabbage and Plant Protection Effect Experiments
 ,
,
Abstract
:1. Introduction
2. Design of an Intermittent Weed Spraying System for Open-Field Cabbage
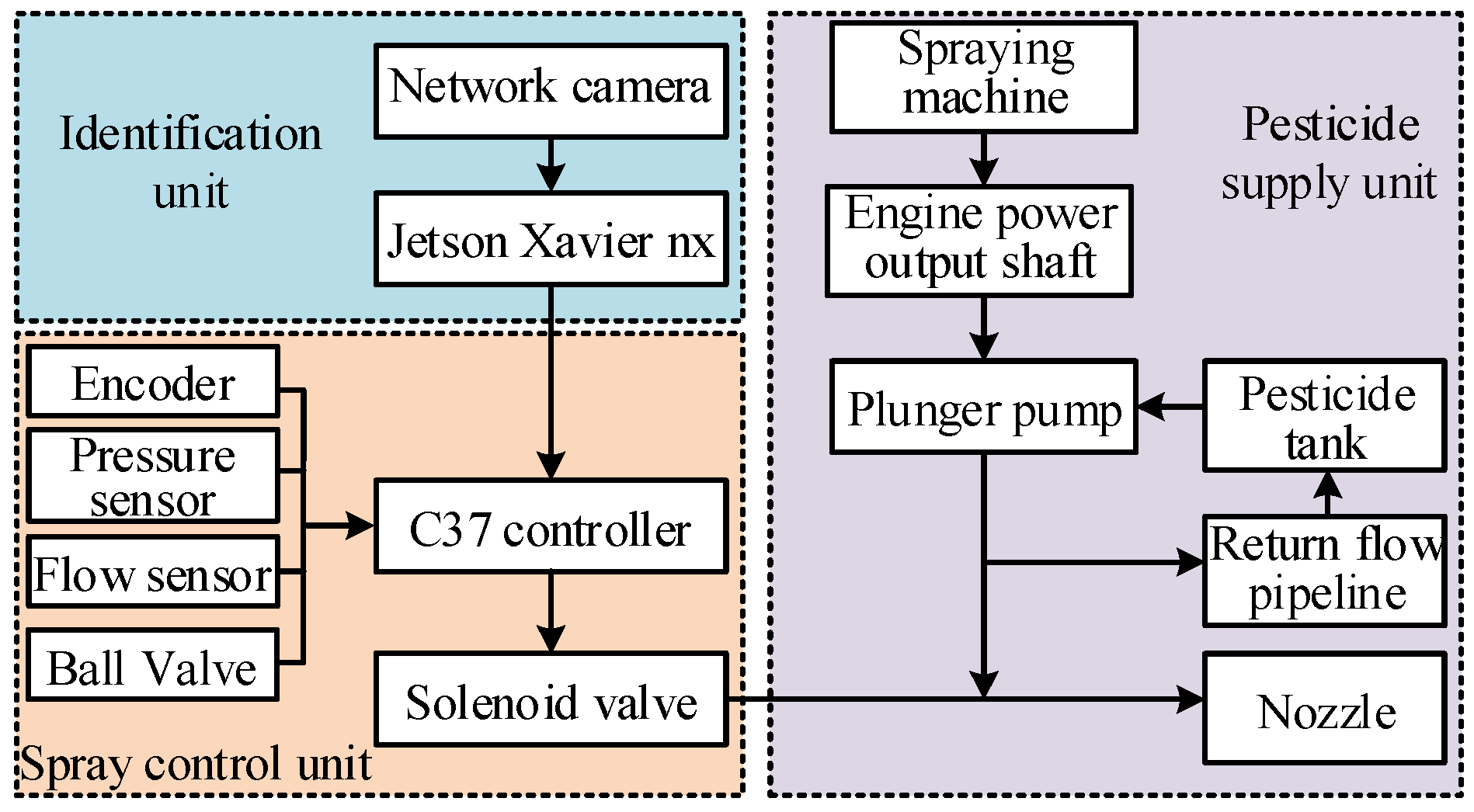
2.1. Hardware Architecture Design
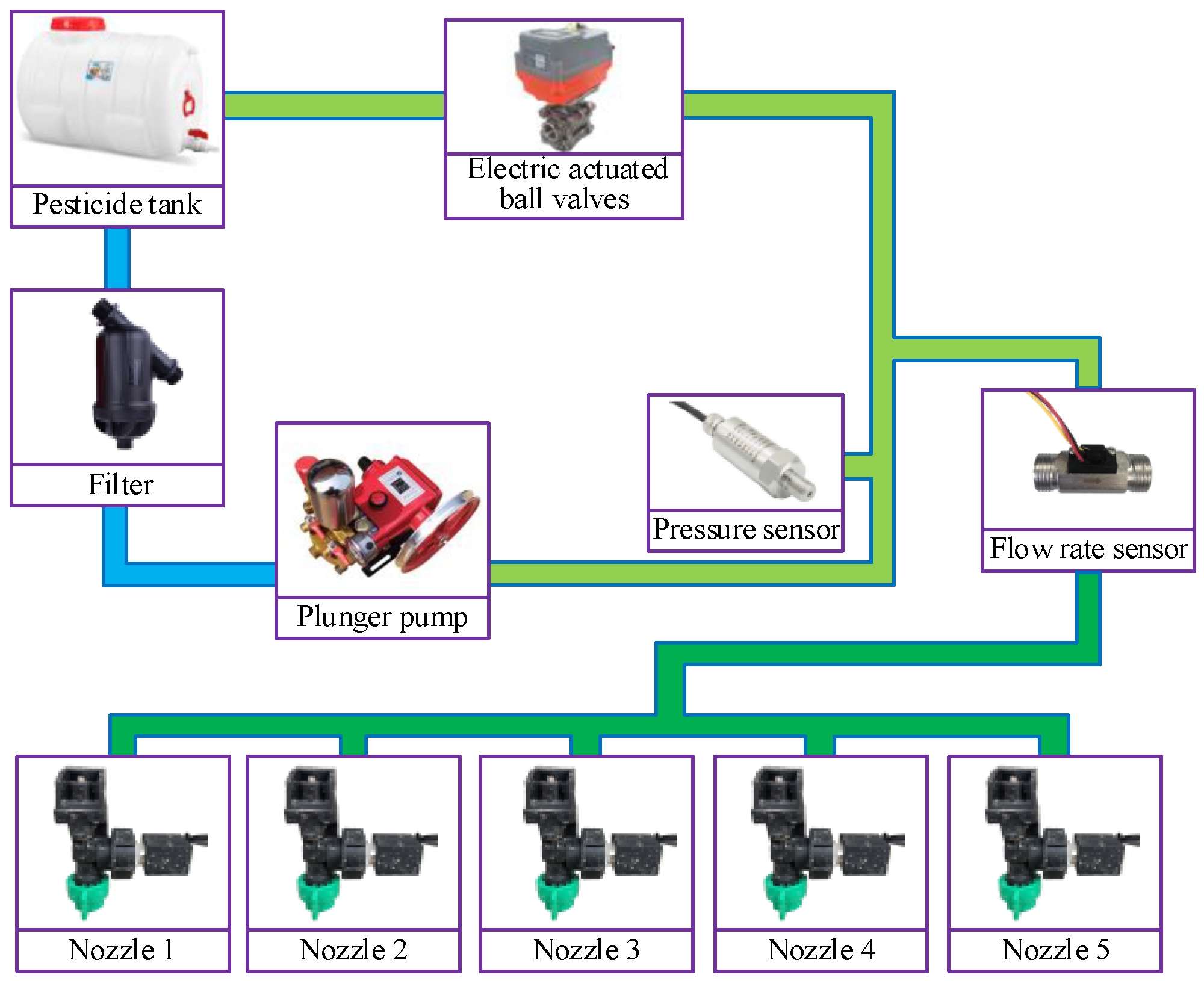
2.2. Pressure Stabilization Design of the Herbicide Supply Unit
2.3. System Software Design
2.3.1. Communication Protocol
2.3.2. Control System Interface Design
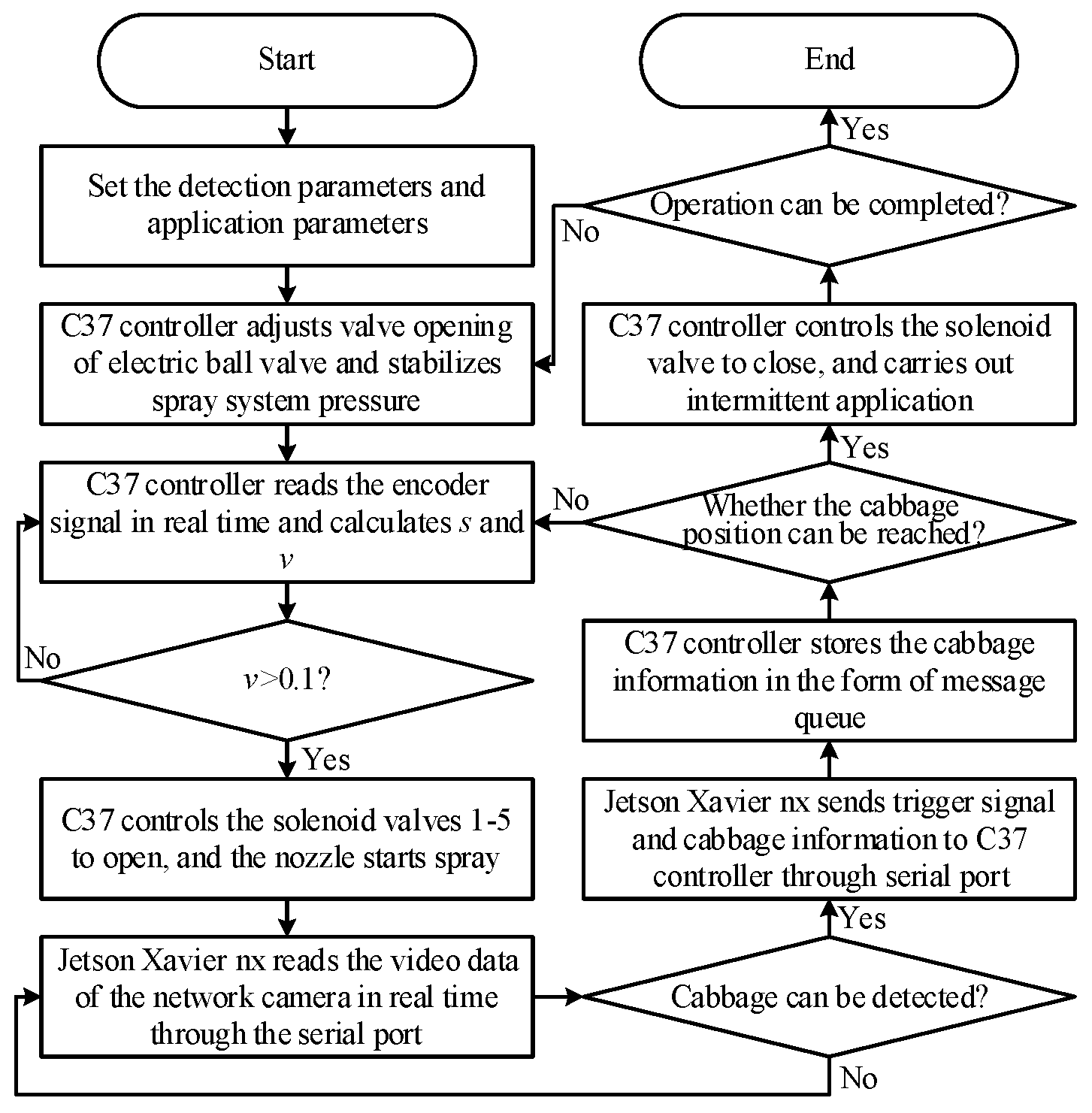
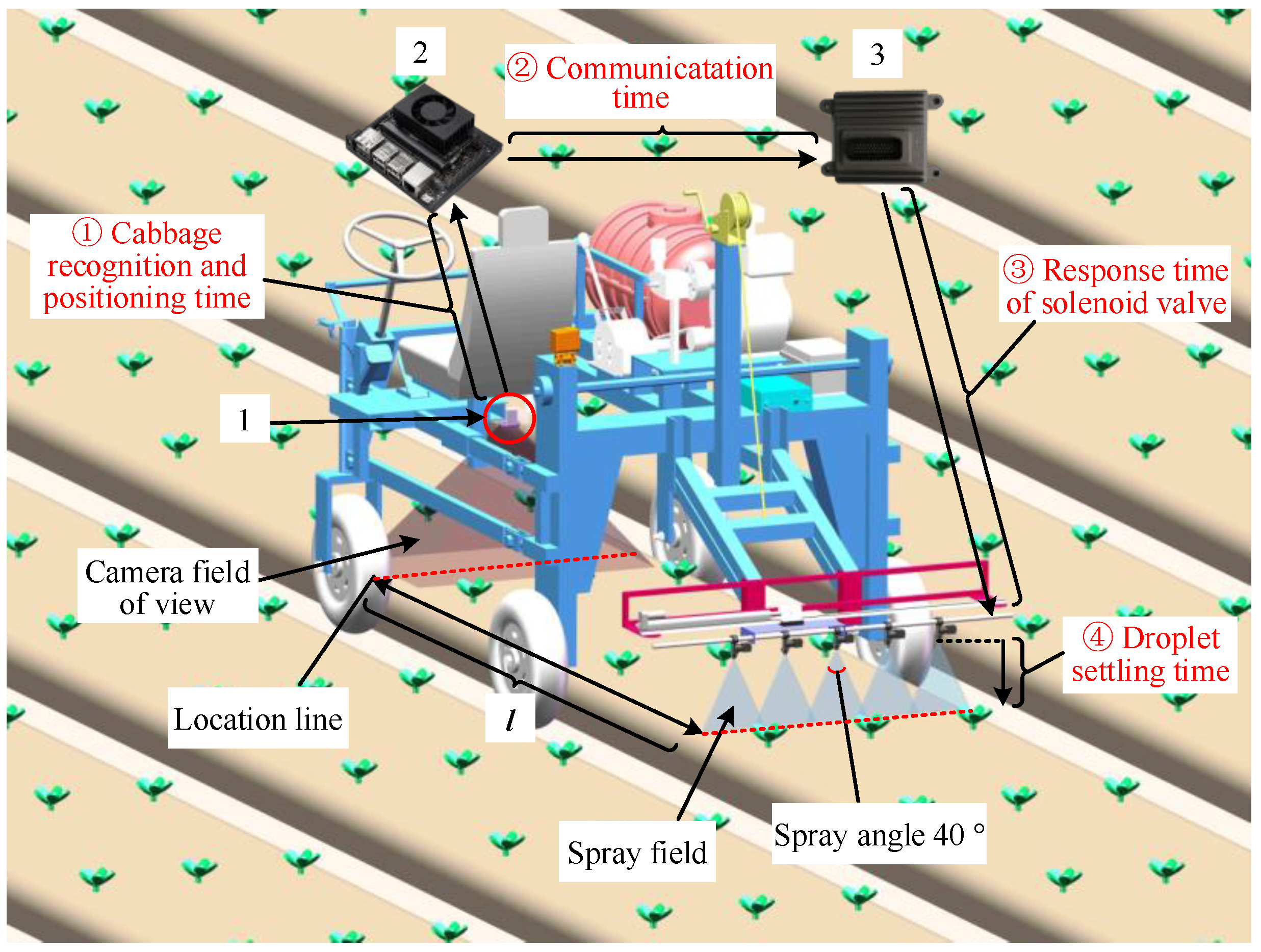
3. Intermittent Weed Spraying Open-Field Cabbage Weed Spraying Control Method
4. Experiment and Results Analysis
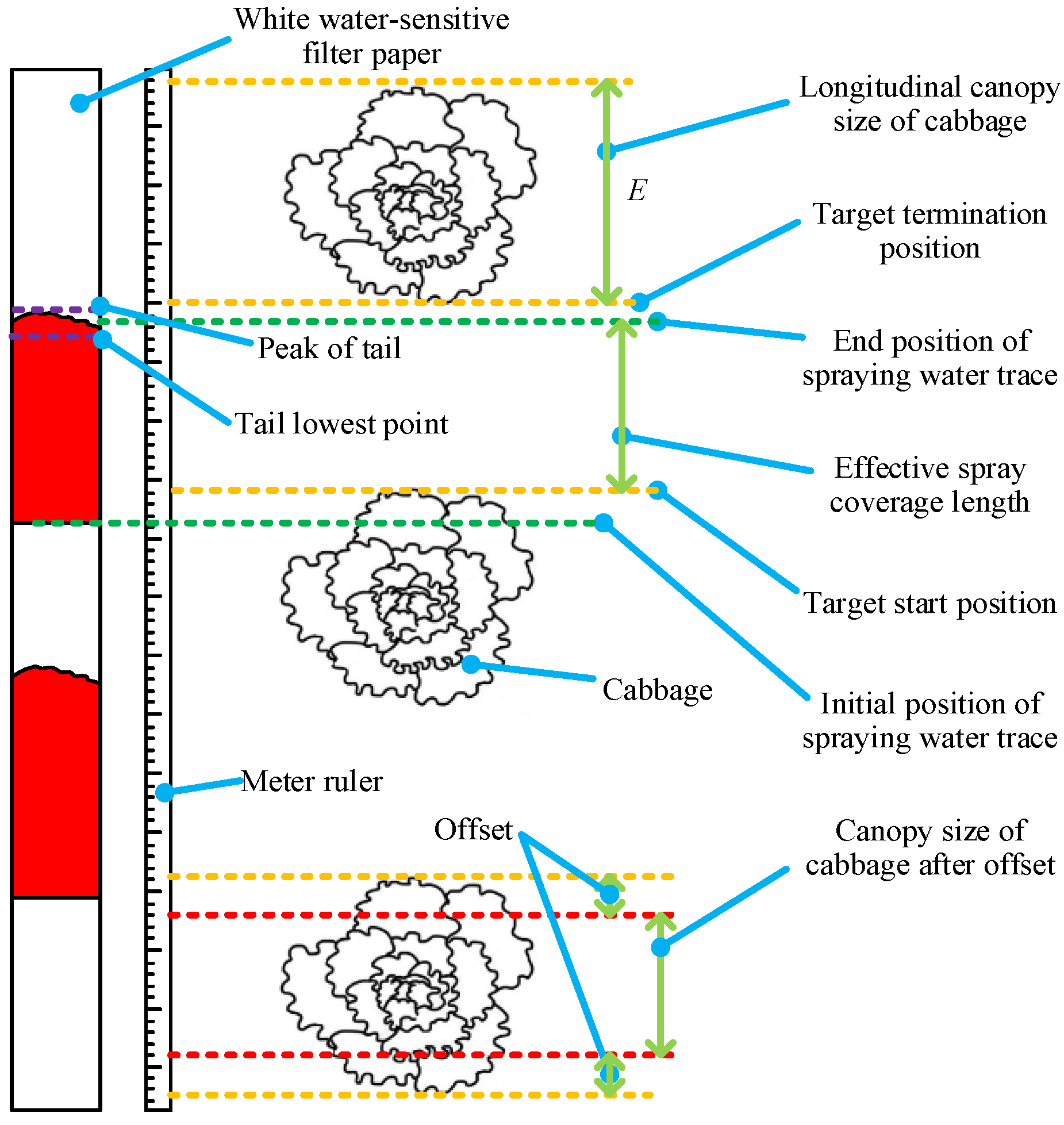
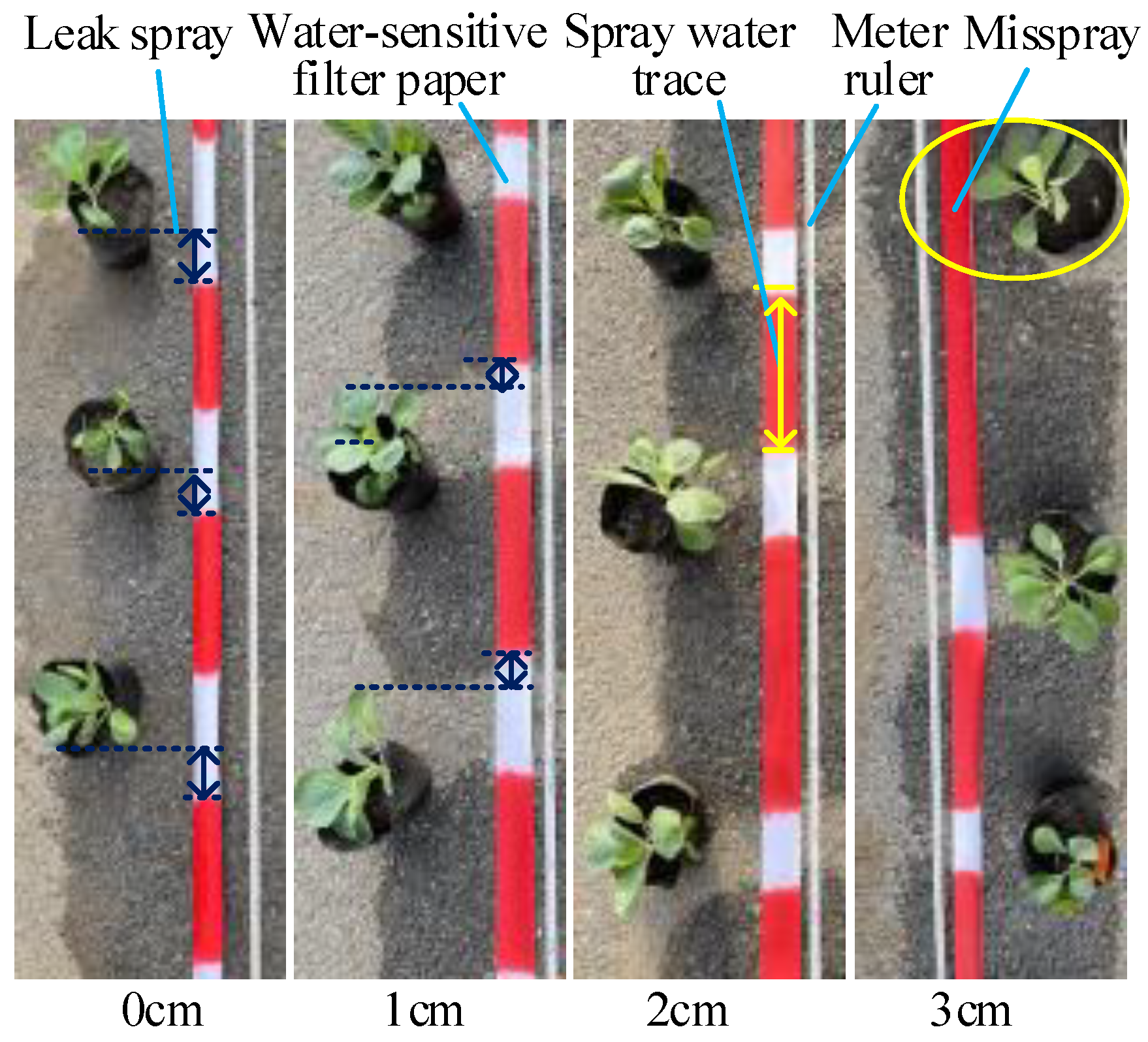
4.1. Offset Selection for Cabbage Weed Spraying
4.2. Effect of Speed on the Accuracy of Intermittent Cabbage Weed Spraying
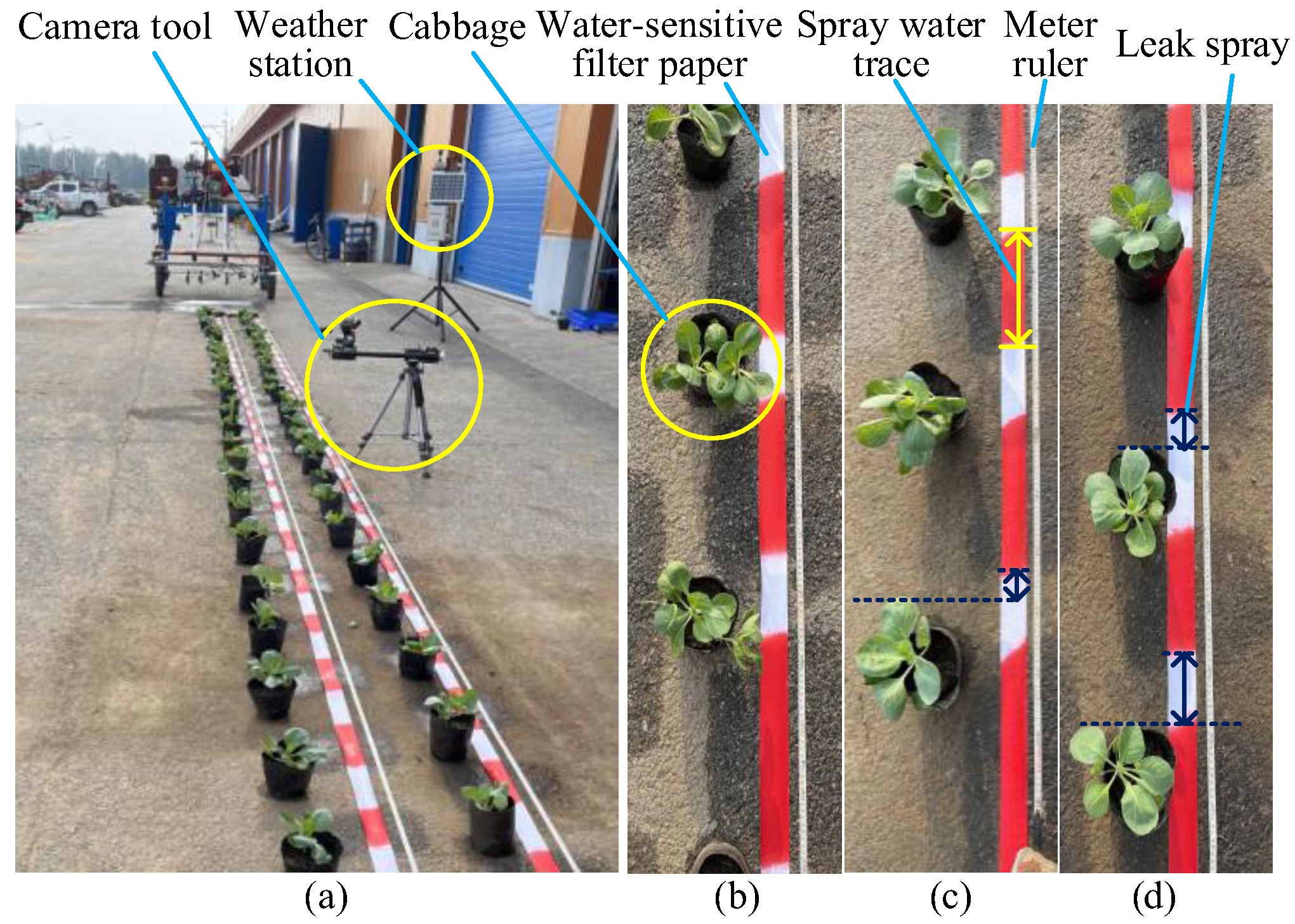
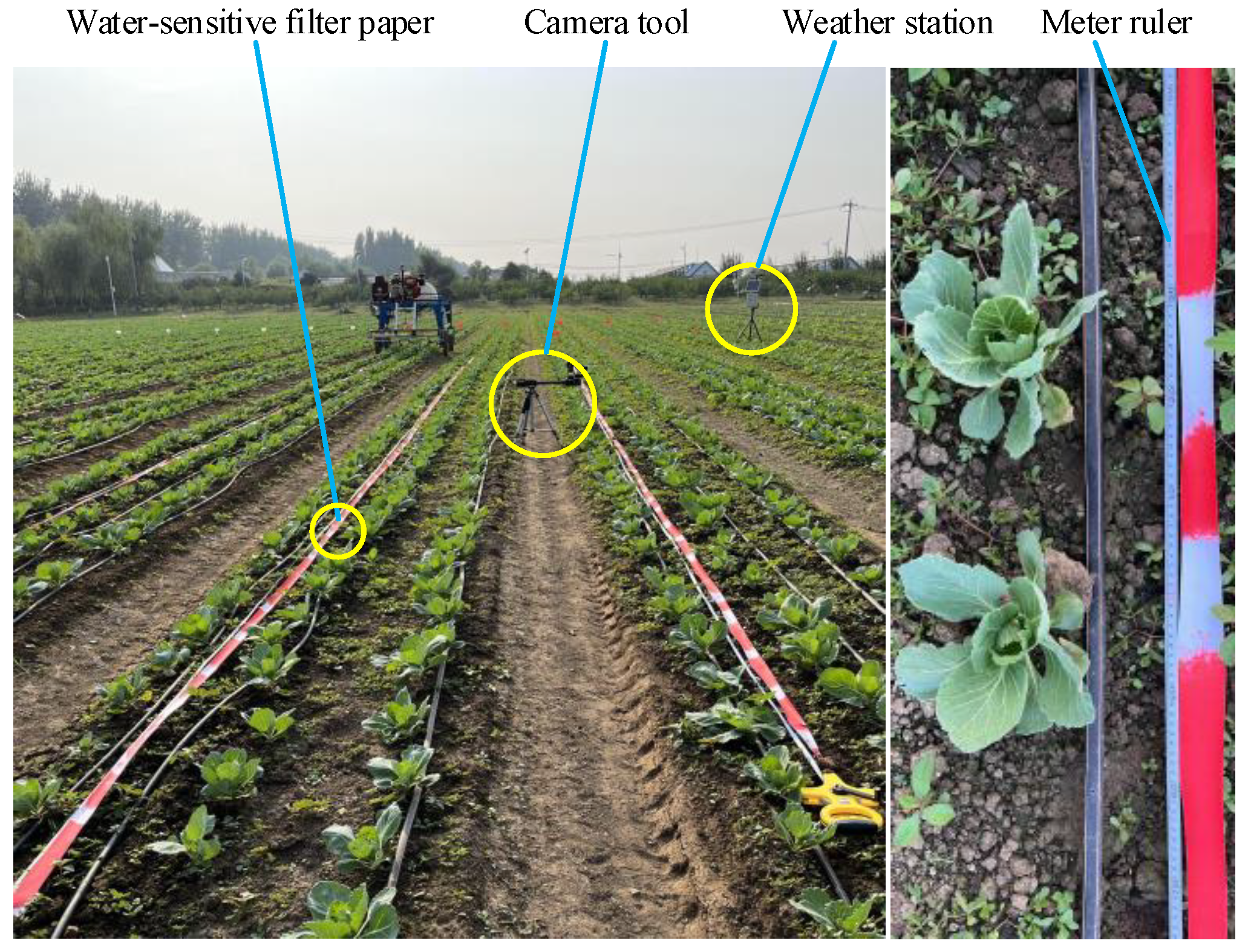
4.3. Field Experiment
4.3.1. Intermittent Cabbage Weed Spraying in Open Field Accuracy Experiments
4.3.2. Comparative Experiment of Efficacy between Intermittent Weed Spraying and Constant-Rate Application of Cabbage in an Open Field
5. Discussion
6. Conclusions
- (1)
- The field environment is complex, and weeding by identifying weeds faces problems such as a wide variety of weeds and overlapping clusters, resulting in low identification accuracy. Compared with weeds, crops are a single species, and their appearance characteristics tend to be consistent in the same period. Therefore, an intermittent weed spraying control method for open-field cabbage is proposed that integrates the cabbage position and canopy size and the working speed of the spraying machine. A steady pressure spray system and an intermittent weed spraying control system are established. In addition, experimental verification was carried out through measurement indexes such as the spraying precision, herbicide saving rate, herbicide efficacy and herbicide residue. Since the industry is currently faced with a status quo of a lack of relevant operational norms and national standards for the precise weed spraying operation mode, this paper provides a relatively perfect experiment and evaluation method for this operation mode.
- (2)
- Operating speed is the main factor affecting the precision of intermittent weeding spraying. With increasing working speed, the MAE, RMSE, and ASCCR increase, the AESCR decreases, and the accuracy of the weed spraying decreases. When the working speed is 0.51 m/s, the MAE and RMSE are not higher than 2.87 cm and 3.40 cm, respectively, and the AESCR is 98.4%, which verifies the feasibility of the intermittent cabbage weed spraying operation.
- (3)
- The average weed-killing rate of intermittent weed spraying in open-field cabbage is 94.8%, and the herbicide saving rate can reach 28.3% under the condition of a similar weeding effect to that of constant-rate application, which not only meets the needs of intermittent weed spraying in open-field cabbage but also has great significance for improving the herbicide utilization rate. At the same time, it also made a great contribution to cost savings.
- (4)
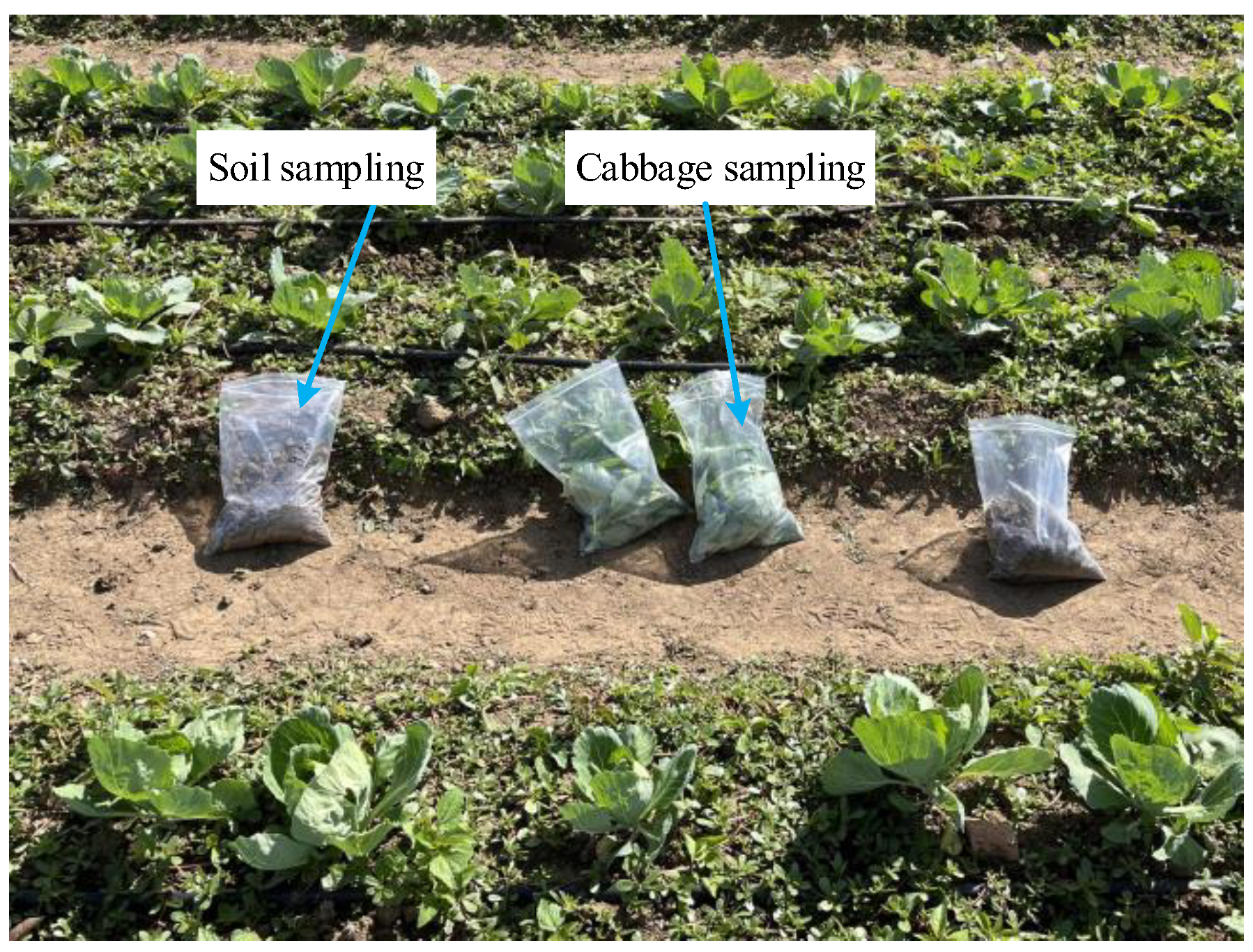
- The pesticide residues in cabbage and soil under intermittent weed spraying and constant-rate application were compared. Compared with a constant-rate application, there was no significant difference using intermittent weed spraying in herbicide residue concentration in soil, and the herbicide residue concentration in cabbage detected decreased by 66.6% on average, which has important research significance and application value for ensuring the normal growth of crops and the safety of agricultural products.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Giles, D.K.; Slaughter, D.C. Precision band spraying with machine-vision guidance and adjustable yaw nozzles. Trans. ASAE 1997, 40, 29–36. [Google Scholar] [CrossRef]
- Jiao, J.K.; Wang, Z.M.; Luo, H.W.; Chen, G.L.; Liu, H.L.; Guan, J.J.; Hu, L.; Zang, Y. Development of a mechanical weeder and experiment on the growth, yield and quality of rice. Int. J. Agric. Biol. Eng. 2022, 15, 92–99. [Google Scholar] [CrossRef]
- Tian, L.; Cao, C.; Qin, K.; Ge, J.; Fang, L. Design and experiment of self-propelled system for paddy field weeder based on the interaction mechanism of wheel-soil. Eng. Agríc. 2022, 42, e20210095. [Google Scholar] [CrossRef]
- Fennimore, S.A.; Slaughter, D.C.; Siemens, M.C.; Leon, R.G.; Saber, M.N. Technology for automation of weed control in specialty crops. Weed Technol. 2017, 30, 823–837. [Google Scholar] [CrossRef]
- Xu, L.; Zhao, S.; Ma, S.; Niu, C.; Yan, C.; Lu, C. Optimized design and experiment of the precise obstacle avoidance control system for a grape interplant weeding machine. Trans. Chin. Soc. Agric. Eng. 2021, 37, 31–39. [Google Scholar] [CrossRef]
- Ahmad, J.; Muhammad, K.; Ahmad, I.; Ahmad, W.; Smith, M.L.; Smith, L.N.; Jain, D.K.; Wang, H.; Mehmood, I. Visual features based boosted classification of weeds for real-time selective herbicide sprayer systems. Comput. Ind. 2018, 98, 23–33. [Google Scholar] [CrossRef]
- Wu, X.; Aravecchia, S.; Lottes, P.; Stachniss, C.; Pradalier, C. Robotic weed control using automated weed and crop classification. J. Field Robot. 2020, 37, 322–340. [Google Scholar] [CrossRef] [Green Version]
- Villette, S.; Maillot, T.; Guillemin, J.P.; Douzals, J.P. Assessment of nozzle control strategies in weed spot spraying to reduce herbicide use and avoid under- or over-application. Biosyst. Eng. 2022, 219, 68–84. [Google Scholar] [CrossRef]
- Laursen, M.S.; Jørgensen, R.N.; Midtiby, H.S.; Jensen, K.; Christiansen, M.P.; Giselsson, T.M.; Mortensen, A.K.; Jensen, P.K. Dicotyledon weed quantification algorithm for selective herbicide application in maize crops. Sensors 2016, 16, 1848. [Google Scholar] [CrossRef] [Green Version]
- Chikowo, R.; Faloya, V.; Petit, S.; Munier-Jolain, N.M. Integrated weed management systems allow reduced reliance on herbicides and long-term weed control. Agric. Ecosyst. Environ. 2009, 132, 237–242. [Google Scholar] [CrossRef]
- Campos, J.; Llop, J.; Gallart, M.; García-Ruiz, F.; Gras, A.; Salcedo, R.; Gil, E. Development of canopy vigour maps using UAV for site-specific management during vineyard spraying process. Precis. Agric. 2019, 20, 1136–1156. [Google Scholar] [CrossRef] [Green Version]
- Campos, J.; Gallart, M.; Llop, J.; Ortega, P.; Salcedo, R.; Gil, E. On-farm evaluation of prescription map-based variable rate application of pesticides in vineyards. Agronomy 2020, 10, 102. [Google Scholar] [CrossRef] [Green Version]
- Román, C.; Llorens, J.; Uribeetxebarria, A.; Sanz, R.; Planas, S.; Arnó, J. Spatially variable pesticide application in vineyards: Part II, field comparison of uniform and map-based variable dose treatments. Biosyst. Eng. 2020, 195, 42–53. [Google Scholar] [CrossRef]
- Dou, H.; Zhai, C.; Wang, X.; Zou, W.; Li, Q.; Chen, L. Design and experiment of the orchard target variable spraying control system based on LiDAR. Trans. Chin. Soc. Agric. Eng. 2022, 38, 11–21. [Google Scholar] [CrossRef]
- Song, L.; Huang, J.; Liang, X.; Yang, S.X.; Hu, W.; Tang, D. An intelligent multi-sensor variable spray system with chaotic optimization and adaptive fuzzy control. Sensors 2020, 20, 2954. [Google Scholar] [CrossRef]
- Alam, M.; Alam, M.S.; Roman, M.; Tufail, M.; Khan, M.U.; Khan, M.T. Real-time machine-learning based crop/weed detection and classification for variable-rate spraying in precision agriculture. In 2020 7th International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 14–16 April 2020; IEEE: Antalya, Turkey, 2020; pp. 273–280. [Google Scholar]
- Grant, S.; Perine, J.; Abi-Akar, F.; Lane, T.; Kent, B.; Mohler, C.; Scott, C.; Ritter, A. A wind-tunnel assessment of parameters that may impact spray drift during UAV pesticide application. Drones 2022, 6, 204. [Google Scholar] [CrossRef]
- Li, S.; Chen, C.; Wang, Y.; Kang, F.; Li, W. Study on the atomization characteristics of flat fan nozzles for pesticide application at low pressures. Agriculture 2021, 11, 309. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and experiment of a variable spray system for unmanned aerial vehicles based on PID and PWM control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.; Che, J.; Chen, Y. Weed identification using deep learning and image processing in vegetable plantation. IEEE Access 2021, 9, 10940–10950. [Google Scholar] [CrossRef]
- Fawakherji, M.; Youssef, A.; Bloisi, D.; Pretto, A.; Nardi, D. Crop and weeds classification for precision agriculture using context-independent pixel-wise segmentation. In 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; IEEE: Naples, Italy, 2019; pp. 146–152. [Google Scholar]
- Espejo-Garcia, B.; Mylonas, N.; Athanasakos, L.; Fountas, S.; Vasilakoglou, I. Towards weeds identification assistance through transfer learning. Comput. Electron. Agric. 2020, 171, 105306. [Google Scholar] [CrossRef]
- Sharpe, S.M.; Schumann, A.W.; Boyd, N.S. Goosegrass detection in strawberry and tomato using a convolutional neural network. Sci. Rep. 2020, 10, 9548. [Google Scholar] [CrossRef]
- Liu, J.; Abbas, I.; Noor, R.S. Development of deep learning-based variable rate agrochemical spraying system for targeted weeds control in strawberry crop. Agronomy 2021, 11, 1480. [Google Scholar] [CrossRef]
- Farooque, A.A.; Hussain, N.; Schumann, A.W.; Abbas, F.; Afzaal, H.; McKenzie-Gopsill, A.; Esau, T.; Zaman, Q.; Wang, X. Field evaluation of a deep learning-based smart variable-rate sprayer for targeted application of agrochemicals. Smart Agric. Technol. 2023, 3, 100073. [Google Scholar] [CrossRef]
- Su, W.H. Advanced machine learning in point spectroscopy, RGB- and hyperspectral-imaging for automatic discriminations of crops and weeds: A review. Smart Cities 2020, 3, 767–792. [Google Scholar] [CrossRef]
- Sodjinou, S.G.; Mohammadi, V.; Mahama, A.T.S.; Gouton, P. A deep semantic segmentation-based algorithm to segment crops and weeds in agronomic color images. Inf. Process. Agric. 2022, 9, 355–364. [Google Scholar] [CrossRef]
- Wang, Q.; Cheng, M.; Huang, S.; Cai, Z.; Zhang, J.; Yuan, H. A deep learning approach incorporating YOLO v5 and attention mechanisms for field real-time detection of the invasive weed Solanum rostratum Dunal seedlings. Comput. Electron. Agric. 2022, 199, 107194. [Google Scholar] [CrossRef]
- Fu, H.; Zhao, X.; Wu, H.; Zheng, S.; Zheng, K.; Zhai, C. Design and experimental verification of the YOLOV5 model implanted with a transformer module for target-oriented spraying in cabbage farming. Agronomy 2022, 12, 2551. [Google Scholar] [CrossRef]
- Zhao, X.; Zheng, S.; Yi, K.; Wang, X.; Zou, W.; Zhai, C. Design and experiment of the target-oriented spraying system for field vegetable considering spray height. Trans. Chin. Soc. Agric. Eng. 2022, 38, 1–11. [Google Scholar] [CrossRef]
- NY T 788-2018; Guideline for the Testing of Pesticide Residues in Crops. Ministry of Agriculture and Rural Affairs of the People’s Republic of China: Beijing, China, 2018.
- Yu, F.; Ma, T. SOP FT-04-03; Standard Operating Procedures on Pesticide Registration Residue Field Trials. Wang, Y., Ji, Y., Eds.; Standards Press of China: Beijing, China, 2007; pp. 408–413. [Google Scholar]
- GB T 20769-2008; Determination of 450 Pesticides and Related Chemicals Residues in Fruits and Related Chemicals Residues in Fruits and Vegetables—LC-MS-MS Method. CNIS: Beijing, China, 2008.
- GB 23200.109-2018; National Food Safety Standard Determination of Clopyralid in Foods of Plant Origin Residues Liquid Chromatography-Mass Spectrometry. CNIS: Beijing, China, 2018.
- Li, H.; Quan, L.; Pi, P.; Guo, Y.; Ma, Z.; Yu, T. Method for controlling directional deposition of mist droplets for target application in field. Trans. Chin. Soc. Agric. Mach. 2022, 53, 102–109, 258. [Google Scholar] [CrossRef]
- GB T 17980.125-2004; Pesticide Guidelines for Field Efficacy Trials (II) Part 125: Herbicides against Weeds in Soybean Fields. CNIS: Beijing, China, 2004.
- Partel, V.; Kakarla, S.C.; Ampatzidis, Y. Development and evaluation of a low-cost and smart technology for precision weed management utilizing artificial intelligence. Comput. Electron. Agric. 2019, 157, 339–350. [Google Scholar] [CrossRef]
- Zanin, A.R.A.; Neves, D.C.; Teodoro, L.P.R.; da Silva Júnior, C.A.; da Silva, S.P.; Teodoro, P.E.; Baio, F.H.R. Reduction of Pesticide Application via Real-Time Precision Spraying. Sci. Rep. 2022, 12, 5638. [Google Scholar] [CrossRef] [PubMed]
- Shearer, S.A.; Jones, P.T. SELECTIVE APPLICATION OF POST-EMERGENCE HERBICIDES USING PHOTOELECTRICS. Trans. ASAE 1991, 34, 1661–1666. [Google Scholar] [CrossRef]
- Dammer, K.-H. Real-Time Variable-Rate Herbicide Application for Weed Control in Carrots. Weed Res. 2016, 56, 237–246. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Model | Company | Main Parameters |
|---|---|---|---|
| Network camera | C930 | Shanghai Liuxiang Trading Co., Ltd., Shanghai, China | Frame rate 30 fps |
| Jetson Xavier NX | Developer Suite | Hunan Chuanglebo Intelligent Technology Co., Ltd., Changsha, China | Computational power 21 tflops |
| Encoder | HTS-5208 | Wuxi Hengte Technology Co., Ltd., Wuxi, China | Resolution 1000 |
| Pressure sensor | 131-B | Beijing Aosheng Automation Technology Co., Ltd., Beijing, China | Pressure range 0~2.5 MPa |
| Flow sensor | HI2144 | Yueqing Ponai Sensor Technology Co., Ltd., Wenzhou, China | Flow range 1~30 L/min |
| Electric ball valve | FRY-02T | Jiangsu Valve Ruiyi Valve Equipment Co., Ltd., Yancheng, China | Control voltage signal DC 0~10 V |
| Controller | C37 | Suzhou Hesheng Microelectronics Technology Co., Ltd., Suzhou, China | 12 PWM outputs, 4 pulse inputs and 6 analog inputs |
| USB-CAN converter | Isolated | Beijing Ledian Xinnan Technology Co., Ltd., Beijing, China | Support package mode |
| Solenoid valve | 2W-050-08ES | Yuyao NO.4 Instrument FACTORY., Ningbo, China | DC 12 V, Response time 20 ms |
| Nozzle | 40015 | Ningbo Licheng Agricultural Spray Technology Co., Ltd., Ningbo, China | Spray angle 40° |
| Node | PDU Identification | Effective Data Length/Bytes | Frame Data Meaning |
|---|---|---|---|
| C37 | 0CE70001 | 2 | Data 0~1: Longitudinal canopy size of cabbage in row 1 |
| 0CE70002 | 2 | Data 0~1: Longitudinal canopy size of cabbage in row 2 | |
| 0CE70003 | 2 | Data 0~1: Longitudinal canopy size of cabbage in row 3 | |
| Jetson Xavier NX | 18E98384 | 6 | Data 0~1: Operation speed |
| Data 2~3: Spraying pressure | |||
| Data 4~5: Spraying flow rate |
| Variable | Abbreviation | Interpretation | Unit |
|---|---|---|---|
| Spraying error | SE | The distance between the center of filter paper spraying water trace and the target center in the traveling direction. | cm |
| Average absolute error | MAE | Average of absolute values of all spraying errors in a set of data. | cm |
| Root mean square error | RMSE | In a set of data, the square root of the mean value of the sum of squares of all errors to the target. | cm |
| Effective spraying cover length | ESCL | Traveling direction filter paper sprays water traces to cover the part of the target length. | cm |
| Effective spraying coverage rate | ESCR | Ratio of effective spraying cover length to target length. | % |
| Average effective spraying coverage rate | AESCR | Average effective spraying coverage rate. | % |
| Spraying coverage cabbage rate | SCCR | Ratio of cabbage length covered by spraying water trace to total cabbage length. | % |
| Average spray cabbage coverage rate | ASCCR | Average cabbage spraying coverage. | % |
| Offset/cm | MAE/cm | RMSE/cm | AESCR/% | ASCCR/% |
|---|---|---|---|---|
| 0 | 2.88 | 3.80 | 80.1 | 15.9 |
| 1 | 3.17 | 3.78 | 88.8 | 22.6 |
| 2 | 2.87 | 3.40 | 98.4 | 28.3 |
| 3 | 3.12 | 3.78 | 100 | 50.8 |
| Operation Speed/(m·s−1) | MAE/cm | RMSE/cm | AESCR/% | ASCCR/% |
|---|---|---|---|---|
| 0.51 | 2.87 | 3.40 | 98.4 | 28.3 |
| 0.68 | 5.20 | 6.19 | 79.2 | 36.6 |
| 0.80 | 8.55 | 9.67 | 56.6 | 67.5 |
| Position | Type of Pesticide | Source | Degree of Freedom DF | Mean Squares | F | p Value |
|---|---|---|---|---|---|---|
| Cabbage | 3,6-Dichloropicolinic acid | Intergroup | 1 | 42771864.8 | 45.27 | <0.01 |
| Intragroup | 22 | 944890.7 | ||||
| Total | 23 | |||||
| Aminopyralid | Intergroup | 1 | 1388370.4 | 38.73 | <0.01 | |
| Intragroup | 22 | 35852.2 | ||||
| Total | 23 | |||||
| Soil | 3,6-Dichloropicolinic acid | Intergroup | 1 | 15780.9 | 0.06 | 0.81 |
| Intragroup | 22 | 267335.6 | ||||
| Total | 23 | |||||
| Aminopyralid | Intergroup | 1 | 235.1 | 0.03 | 0.87 | |
| Intragroup | 22 | 7957.0 | ||||
| Total | 23 |
| Position | Type of Pesticide | Experiment | Mean ± SD | Minimum | Maximum | % Saving |
|---|---|---|---|---|---|---|
| Cabbage | 3,6-Dichloropicolinic acid | Intermittent application | 1294.5 ± 168.4 | 547.5 | 2979.4 | 67.3 |
| Constant-rate application | 3964.5 ± 340.6 | 2341.1 | 6737.9 | NA | ||
| Aminopyralid | Intermittent application | 249.9 ± 33.0 | 159.0 | 595.1 | 65.8 | |
| Constant-rate application | 730.9 ± 66.3 | 451.2 | 1214.6 | NA | ||
| Soil | 3,6-Dichloropicolinic acid | Intermittent application | 924.3 ± 117.0 | 244.4 | 1512.1 | 5.3 |
| Constant-rate application | 975.6 ± 165.5 | 291.4 | 2738.5 | NA | ||
| Aminopyralid | Intermittent application | 181.3 ± 25.2 | 51.6 | 326.2 | 3.4 | |
| Constant-rate application | 187.6 ± 24.0 | 43.9 | 410.0 | NA |
| No./Weed Coverage | Intermittent Application | Constant-Rate Application | ||||
|---|---|---|---|---|---|---|
| Before Application | After Application | Weed Killing Rate | Before Application | After Application | Weed Killing Rate | |
| 1 | 39.8 | 2.1 | 94.7 | 44.0 | 1.4 | 96.9 |
| 2 | 38.6 | 2.2 | 94.4 | 45.2 | 1.6 | 96.5 |
| 3 | 36.5 | 1.6 | 95.8 | 35.9 | 0.9 | 97.5 |
| 4 | 38.4 | 2.0 | 94.9 | 39.9 | 1.7 | 95.7 |
| 5 | 43.9 | 2.3 | 94.9 | 36.7 | 1.1 | 97.1 |
| 6 | 43.3 | 2.6 | 94.0 | 45.9 | 1.3 | 97.2 |
| Mean value | 40.1 | 2.1 | 94.8 | 41.3 | 1.3 | 96.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, S.; Zhao, X.; Zhang, X.; Fu, H.; Yi, K.; Zhai, C. Design of an Intermittent Herbicide Spray System for Open-Field Cabbage and Plant Protection Effect Experiments. Agronomy 2023, 13, 286. https://doi.org/10.3390/agronomy13020286
Zheng S, Zhao X, Zhang X, Fu H, Yi K, Zhai C. Design of an Intermittent Herbicide Spray System for Open-Field Cabbage and Plant Protection Effect Experiments. Agronomy. 2023; 13(2):286. https://doi.org/10.3390/agronomy13020286
Chicago/Turabian StyleZheng, Shenyu, Xueguan Zhao, Xinwei Zhang, Hao Fu, Kechuan Yi, and Changyuan Zhai. 2023. "Design of an Intermittent Herbicide Spray System for Open-Field Cabbage and Plant Protection Effect Experiments" Agronomy 13, no. 2: 286. https://doi.org/10.3390/agronomy13020286