
Real-Time Localization and Mapping Utilizing Multi-Sensor Fusion and Visual–IMU–Wheel Odometry for Agricultural Robots in Unstructured, Dynamic and GPS-Denied Greenhouse Environments



Abstract
:1. Introduction
- Estimating the pose of the robot singly using wheel encoders, IMU and Visual SLAM;
- Integrating the estimation result of each sensor into a loosely coupled multi-sensor fusion framework to achieve accurate localization;
- Generating a dense 3D point cloud map of surroundings on the basis of fused pose estimation output.
2. Materials and Methods
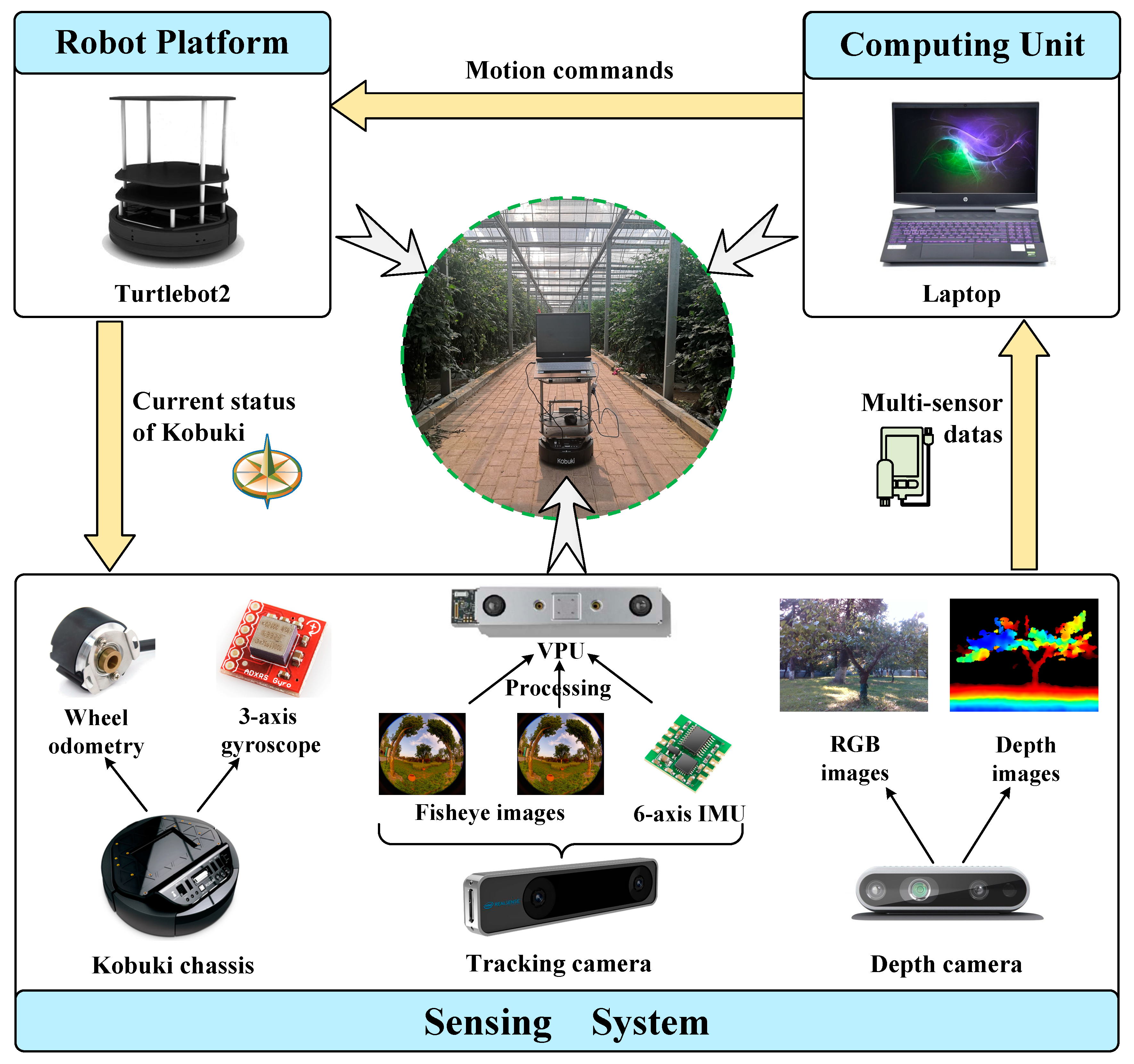
2.1. ROS-Based Real-Time Localization and Mapping System
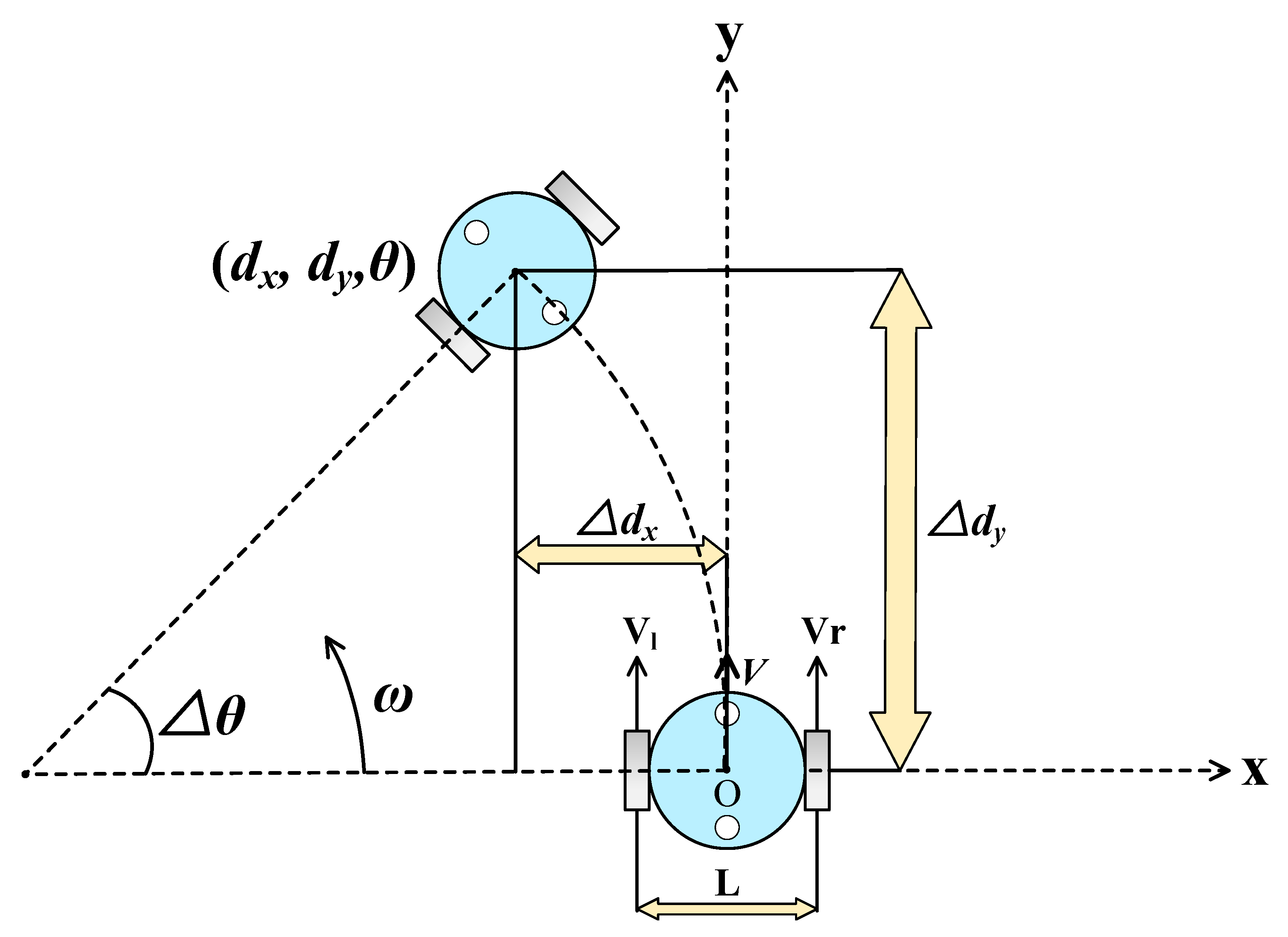
2.2. Wheel Odometry Measurement Model
2.3. State Estimation Model of IMU
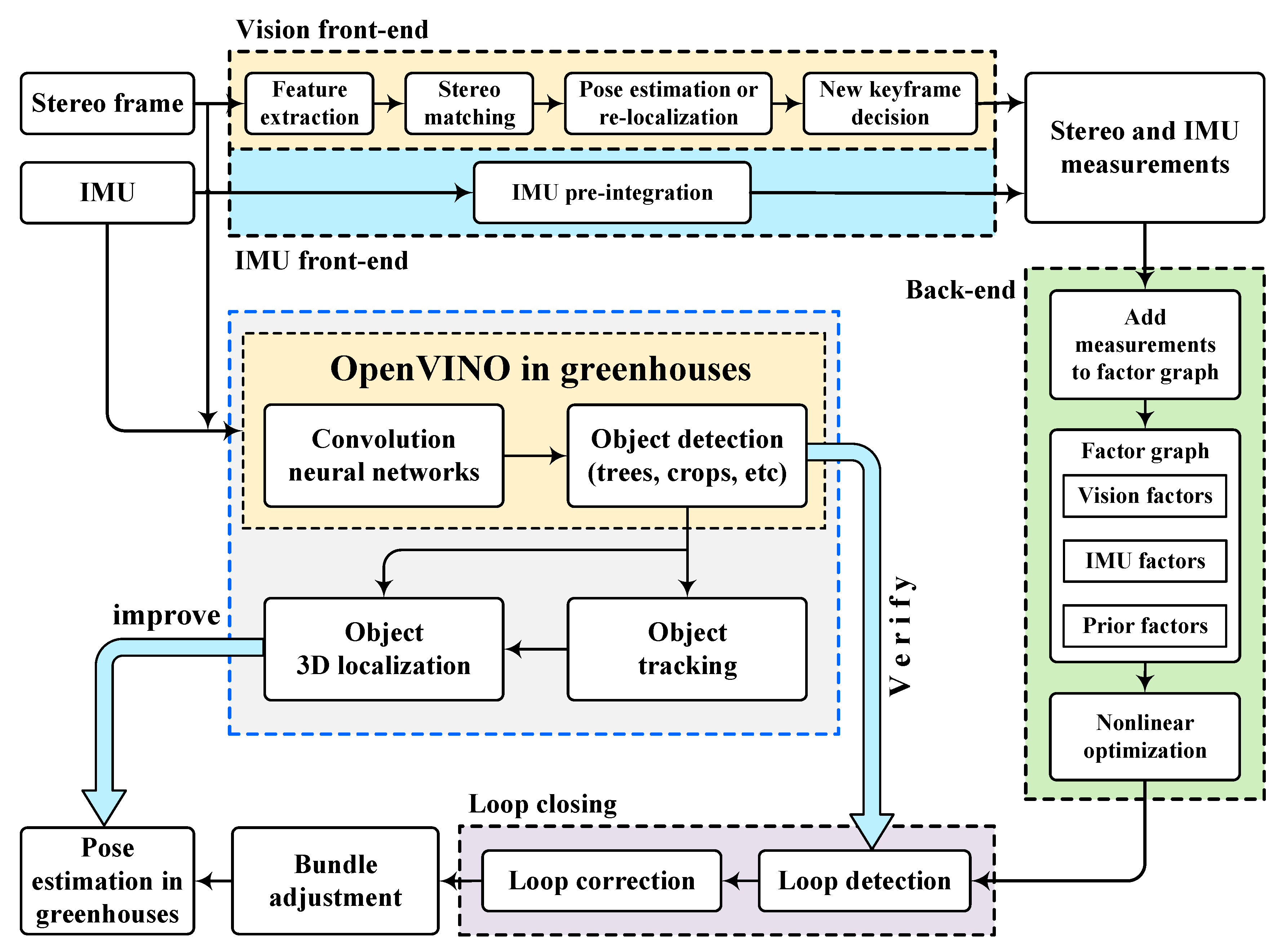
2.4. Visual–Inertial Tightly Coupled SLAM
2.5. Visual–IMU–Wheel Odometry Fusion with EKF
2.6. Dense 3D Point Cloud Mapping of Greenhouses
2.7. The Overall Localization and Mapping Framework
3. Results and Discussion
3.1. Evaluation of Localization Accuracy
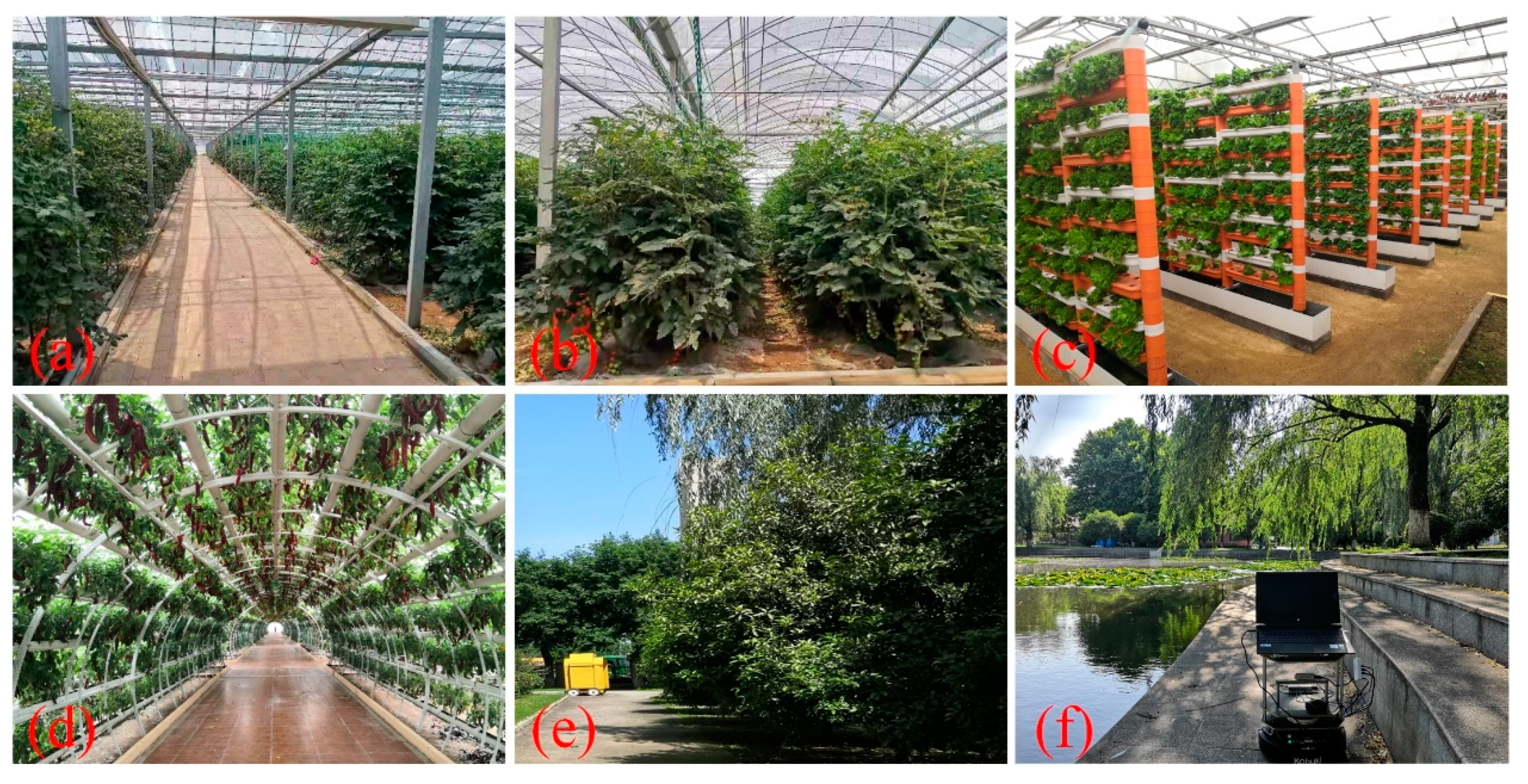
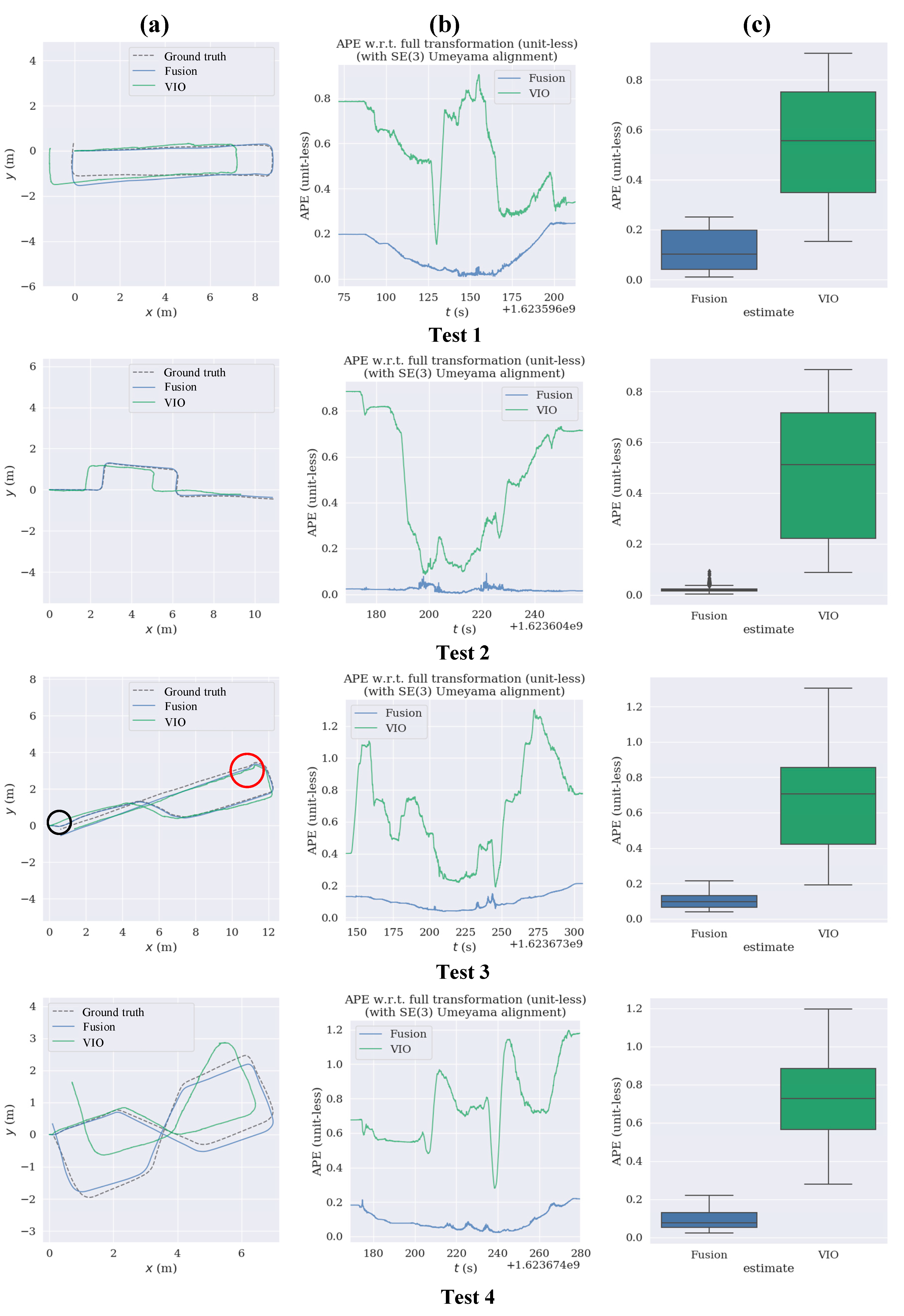
3.1.1. Traveling a Closed Path inside a Greenhouse
3.1.2. Crossing the Intersection in the Greenhouse
3.1.3. Traveling in a Soilless Greenhouse
3.1.4. Moving through the Gallery Frame Structure in the Greenhouse
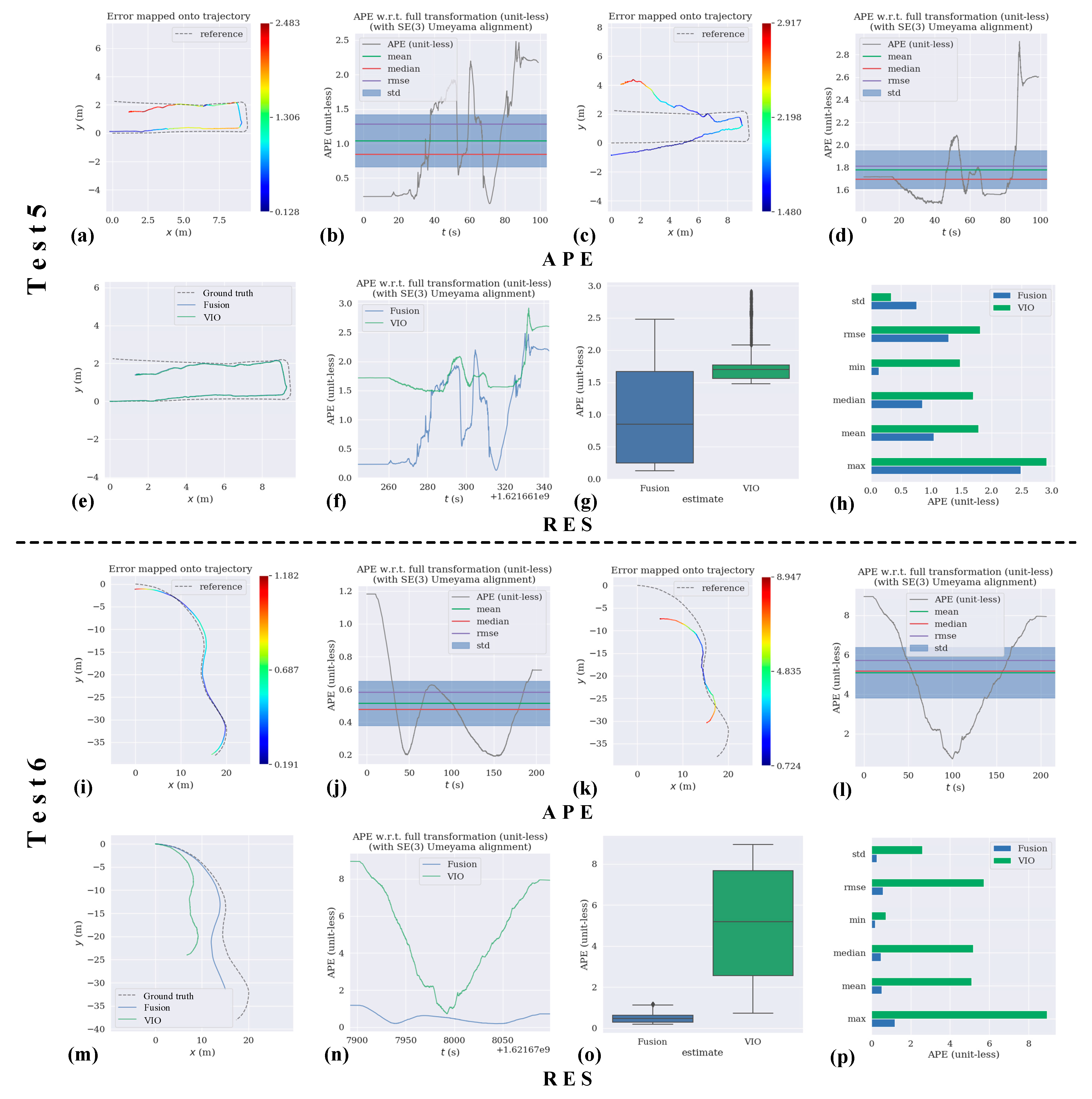
3.1.5. Moving in the Long Straight Grove
3.1.6. Touring at the Edge of the Pond
3.2. Analysis of Localization Robustness
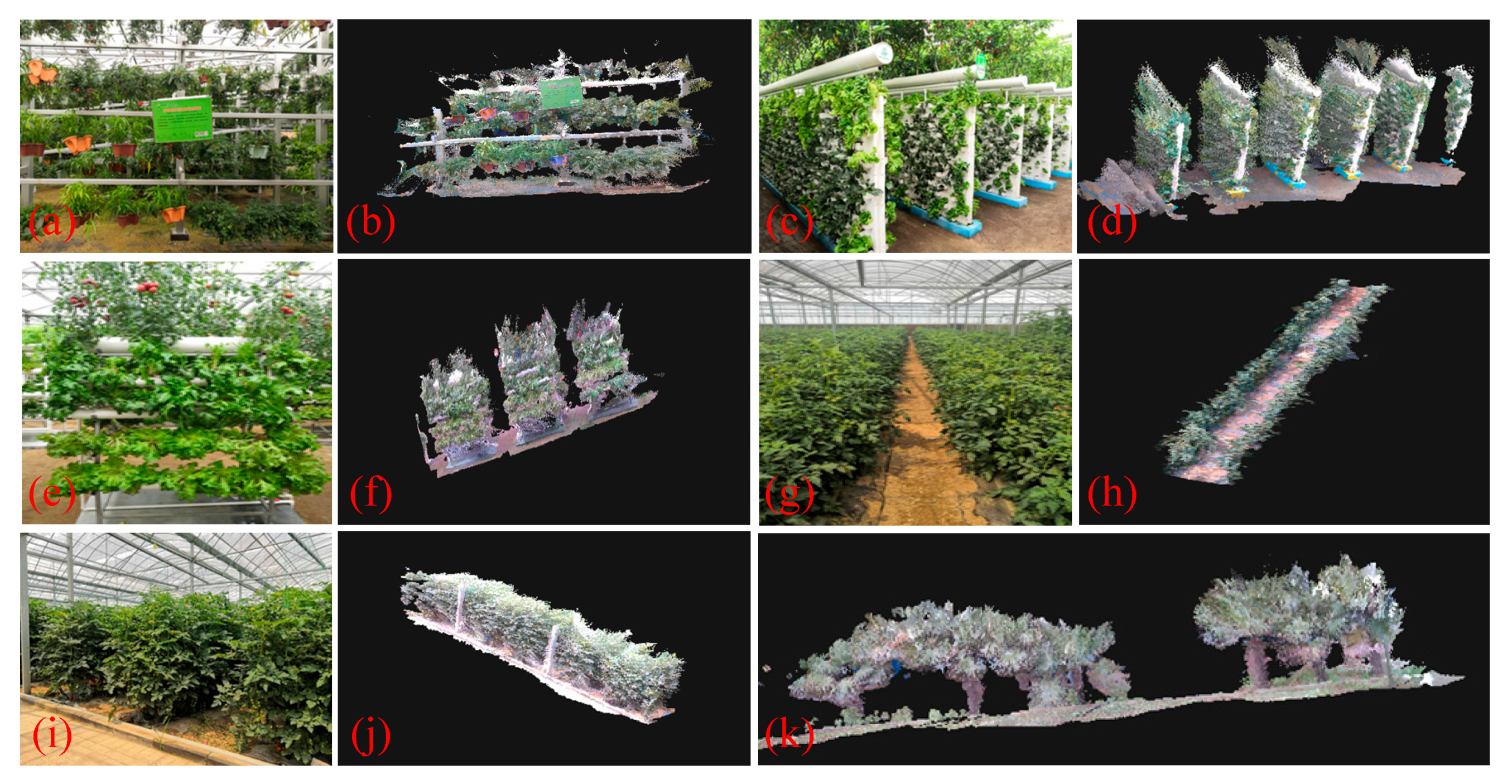
3.3. Mapping Quality
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shalal, N.; Low, T.; McCarthy, C.; Hancock, N. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion–Part B: Mapping and localisation. Comput. Electron. Agric. 2015, 119, 267–278. [Google Scholar] [CrossRef]
- Erfani, S.; Jafari, A.; Hajiahmad, A. Comparison of two data fusion methods for localization of wheeled mobile robot in farm conditions. Artif. Intell. Agric. 2019, 1, 48–55. [Google Scholar] [CrossRef]
- Winterhalter, W.; Fleckenstein, F.; Dornhege, C.; Burgard, W. Localization for precision navigation in agricultural fields—Beyond crop row following. J. Field Robot. 2021, 38, 429–451. [Google Scholar] [CrossRef]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Chewu, C.C.E.; Kumar, V.M. Autonomous navigation of a mobile robot in dynamic indoor environments using SLAM and reinforcement learning. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Nanjing, China, 17–19 August 2018; IOP Publishing: Bristol, UK, 2018; Volume 402, p. 012022. [Google Scholar] [CrossRef]
- Kalogeiton, V.S.; Ioannidis, K.; Sirakoulis, G.C.; Kosmatopoulos, E.B. Real-Time Active SLAM and Obstacle Avoidance for an Autonomous Robot Based on Stereo Vision. Cybern. Syst. 2019, 50, 239–260. [Google Scholar] [CrossRef]
- Plessen, M.G. Coupling of crop assignment and vehicle routing for harvest planning in agriculture. Artif. Intell. Agric. 2019, 2, 99–109. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, B.; Zhou, J.; Wang, K. Real-time 3D unstructured environment reconstruction utilizing VR and Kinect-based immersive teleoperation for agricultural field robots. Comput. Electron. Agric. 2020, 175, 105579. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.; Grimstad, L.; From, P.J. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation. J. Field Robot. 2020, 37, 202–224. [Google Scholar] [CrossRef] [Green Version]
- Balasuriya, B.L.E.A.; Chathuranga, B.A.H.; Jayasundara, B.H.M.D.; Napagoda, N.R.A.C.; Kumarawadu, S.P.; Chandima, D.P.; Jayasekara, A.G.B.P. Outdoor robot navigation using Gmapping based SLAM algorithm. In Proceedings of the 2016 Moratuwa Engi-neering Research Conference (MERCon), Moratuwa, Sri Lanka, 5–6 April 2016; pp. 403–408. [Google Scholar] [CrossRef]
- Yousif, K.; Bab-Hadiashar, A.; Hoseinnezhad, R. An Overview to Visual Odometry and Visual SLAM: Applications to Mobile Robotics. Intell. Ind. Syst. 2015, 1, 289–311. [Google Scholar] [CrossRef]
- Yang, S.; Scherer, S. Monocular Object and Plane SLAM in Structured Environments. IEEE Robot. Autom. Lett. 2019, 4, 3145–3152. [Google Scholar] [CrossRef] [Green Version]
- Droeschel, D.; Behnke, S. Efficient Continuous-time SLAM for 3D Lidar-based Online Mapping. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 5000–5007. [Google Scholar] [CrossRef] [Green Version]
- Ding, H.; Zhang, B.; Zhou, J.; Yan, Y.; Tian, G.; Gu, B. Recent developments and applications of simultaneous localization and mapping in agriculture. J. Field Robot. 2022, 1–28. [Google Scholar] [CrossRef]
- Deng, X.; Zhang, Z.; Sintov, A.; Huang, J.; Bretl, T. Feature-constrained active visual SLAM for mobile robot navigation. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 7233–7238. [Google Scholar] [CrossRef]
- Wang, S.; Wu, Z.; Zhang, W. An overview of SLAM. In Proceedings of the 2018 Chinese Intelligent Systems Conference; Springer: Singapore, 2019; pp. 673–681. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Sun, Y.; Li, X.; Sun, N.; Zhang, X.; Yu, N. A localization and navigation method with ORB-SLAM for indoor service mobile robots. In Proceedings of the 2016 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Angkor Wat, Cambodia, 6–10 June 2016; pp. 443–447. [Google Scholar] [CrossRef]
- Filipenko, M.; Afanasyev, I. Comparison of various slam systems for mobile robot in an indoor environment. In Proceedings of the 2018 International Conference on Intelligent Systems (IS), Funchal, Portugal, 25–27 September 2018; pp. 400–407. [Google Scholar] [CrossRef]
- Xu, L.; Feng, C.; Kamat, V.R.; Menassa, C.C. An Occupancy Grid Mapping enhanced visual SLAM for real-time locating applications in indoor GPS-denied environments. Autom. Constr. 2019, 104, 230–245. [Google Scholar] [CrossRef]
- Fang, B.; Mei, G.; Yuan, X.; Wang, L.; Wang, Z.; Wang, J. Visual SLAM for robot navigation in healthcare facility. Pattern Recognit. 2021, 113, 107822. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, D.; Wang, D.; Song, W.; Wang, J.; Fu, M. Multi-camera visual SLAM for off-road navigation. Robot. Auton. Syst. 2020, 128, 103505. [Google Scholar] [CrossRef]
- Afia, A.B.; Escher, A.C.; Macabiau, C. A low-cost gnss/imu/visual monoslam/wss integration based on federated kalman filtering for navigation in urban environments. In Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 618–628. [Google Scholar]
- Alliez, P.; Bonardi, F.; Bouchafa, S.; Didier, J.-Y.; Hadj-Abdelkader, H.; Munoz, F.I.; Kachurka, V.; Rault, B.; Robin, M.; Roussel, D. Real-Time Multi-SLAM System for Agent Localization and 3D Mapping in Dynamic Scenarios. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24–30 October 2020; pp. 4894–4900. [Google Scholar] [CrossRef]
- Lin, J.; Zheng, C.; Xu, W.; Zhang, F. R2LIVE: A Robust, Real-time, LiDAR-Inertial-Visual tightly-coupled state Estimator and mapping. arXiv 2021, arXiv:2102.12400. [Google Scholar]
- Dong, W.; Roy, P.; Isler, V. Semantic mapping for orchard environments by merging two-sides reconstructions of tree rows. J. Field Robot. 2020, 37, 97–121. [Google Scholar] [CrossRef]
- Post, M.A.; Bianco, A.; Yan, X.T. Autonomous navigation with ROS for a mobile robot in agricultural fields. In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Madrid, Spain, 26–28 July 2017. [Google Scholar] [CrossRef]
- Galati, R.; Reina, G.; Messina, A.; Gentile, A. Survey and navigation in agricultural environments using robotic technologies. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Astolfi, P.; Gabrielli, A.; Bascetta, L.; Matteucci, M. Vineyard Autonomous Navigation in the Echord++ GRAPE Experiment. IFAC-PapersOnLine 2018, 51, 704–709. [Google Scholar] [CrossRef]
- Ali, W.; Sheng, L.; Ahmed, W. Robot Operating System-Based SLAM for a Gazebo-Simulated Turtlebot2 in 2d Indoor Environment with Cartographer Algorithm. Int. J. Mech. Mechatron. Eng. 2021, 15, 149–157. [Google Scholar]
- Alag, G. Evaluating the Performance of Intel Realsense T265 Xsens Technologies BV. 2020. Available online: https://purl.utwente.nl/essays/86344 (accessed on 28 June 2022).
- Argush, G.; Holincheck, W.; Krynitsky, J.; McGuire, B.; Scott, D.; Tolleson, C.; Behl, M. Explorer51–Indoor Mapping, Discovery, and Navigation for an Autonomous Mobile Robot. In Proceedings of the 2020 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 24 April 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Chien, W.Y. Stereo-Camera Occupancy Grid Mapping. Master′s Thesis, The Pennsylvania State University, State College, PA, USA, 2020. [Google Scholar]
- Myint, C.; Win, N.N. Position and velocity control for two-wheel differential drive mobile robot. Int. J. Sci. Eng. Technol. Res. 2016, 5, 2849–2855. [Google Scholar]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. Benchmark of an intelligent fuzzy calculator for admissible estimation of drawbar pull supplied by mechanical front wheel drive tractor. Artif. Intell. Agric. 2020, 4, 209–218. [Google Scholar] [CrossRef]
- Zhu, J.; Tang, Y.; Shao, X.; Xie, Y. Multisensor Fusion Using Fuzzy Inference System for a Visual-IMU-Wheel Odometry. IEEE Trans. Instrum. Meas. 2021, 70, 2505216. [Google Scholar] [CrossRef]
- Brunetto, N.; Salti, S.; Fioraio, N.; Cavallari, T.; Stefano, L. Fusion of inertial and visual measurements for rgb-d slam on mobile devices. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Santiago, Chile, 7–13 December 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Bloesch, M.; Omari, S.; Hutter, M.; Siegwart, R. Robust visual inertial odometry using a direct EKF-based ap-proach. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 298–304. [Google Scholar] [CrossRef] [Green Version]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual--Inertial Odometry. IEEE Trans. Robot. 2016, 33, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Shan, Z.; Li, R.; Schwertfeger, S. RGBD-Inertial Trajectory Estimation and Mapping for Ground Robots. Sensors 2019, 19, 2251. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Agarwal, A.; Crouse, J.R.; Johnson, E.N. Evaluation of a commercially available autonomous visual inertial odometry solution for indoor navigation. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 372–381. [Google Scholar] [CrossRef]
- Grunnet-Jepsen, A.; Harville, M.; Fulkerson, B.; Piro, D.; Brook, S. Introduction to Intel RealSense Visual SLAM and the T265 Tracking Camera. Product Documentation. 2019. Available online: https://dev.intelrealsense.com/docs/intel-realsensetm-visual-slam-and-the-t265-tracking-camera (accessed on 28 June 2022).
- Rezende, A.M.; Júnior, G.P.; Fernandes, R.; Miranda, V.R.; Azpúrua, H.; Pessin, G.; Freitas, G.M. Indoor locali-zation and navigation control strategies for a mobile robot designed to inspect confined environments. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 1427–1433. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardos, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test ID | Sensors | Std | RMSE | Min | Median | Mean | Max |
|---|---|---|---|---|---|---|---|
| Test1 (Greenhouse) | Fusion | 0.0781 | 0.1412 | 0.0102 | 0.1029 | 0.1177 | 0.2514 |
| VIO | 0.1933 | 0.5897 | 0.1527 | 0.5554 | 0.5571 | 0.9056 | |
| Test2 (Greenhouse) | Fusion | 0.0090 | 0.0227 | 0.0034 | 0.0200 | 0.0209 | 0.0912 |
| VIO | 0.2694 | 0.5637 | 0.0866 | 0.5126 | 0.4951 | 0.8857 | |
| Test3 (Greenhouse) | Fusion | 0.0460 | 0.1140 | 0.0390 | 0.0971 | 0.1044 | 0.2140 |
| VIO | 0.2996 | 0.7295 | 0.1926 | 0.7063 | 0.6651 | 1.3038 | |
| Test4 (Greenhouse) | Fusion | 0.0565 | 0.1090 | 0.0230 | 0.0771 | 0.0933 | 0.2210 |
| VIO | 0.2077 | 0.7824 | 0.2802 | 0.7278 | 0.7543 | 1.1963 | |
| Test5 (Outdoor) | Fusion | 0.3758 | 0.6067 | 0.0567 | 0.3269 | 0.4763 | 1.4204 |
| VIO | 0.5362 | 1.0631 | 0.2959 | 0.8540 | 0.9179 | 2.5018 | |
| Test6 (Outdoor) | Fusion | 0.2719 | 0.5825 | 0.1907 | 0.4792 | 0.5152 | 1.1824 |
| VIO | 2.5838 | 5.7139 | 0.7239 | 5.1807 | 5.0963 | 8.9466 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Y.; Zhang, B.; Zhou, J.; Zhang, Y.; Liu, X. Real-Time Localization and Mapping Utilizing Multi-Sensor Fusion and Visual–IMU–Wheel Odometry for Agricultural Robots in Unstructured, Dynamic and GPS-Denied Greenhouse Environments. Agronomy 2022, 12, 1740. https://doi.org/10.3390/agronomy12081740
Yan Y, Zhang B, Zhou J, Zhang Y, Liu X. Real-Time Localization and Mapping Utilizing Multi-Sensor Fusion and Visual–IMU–Wheel Odometry for Agricultural Robots in Unstructured, Dynamic and GPS-Denied Greenhouse Environments. Agronomy. 2022; 12(8):1740. https://doi.org/10.3390/agronomy12081740
Chicago/Turabian StyleYan, Yaxuan, Baohua Zhang, Jun Zhou, Yibo Zhang, and Xiao’ang Liu. 2022. "Real-Time Localization and Mapping Utilizing Multi-Sensor Fusion and Visual–IMU–Wheel Odometry for Agricultural Robots in Unstructured, Dynamic and GPS-Denied Greenhouse Environments" Agronomy 12, no. 8: 1740. https://doi.org/10.3390/agronomy12081740