
YOLO-Banana: A Lightweight Neural Network for Rapid Detection of Banana Bunches and Stalks in the Natural Environment

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Image Acquisition
2.2. YOLO Series and Previous Work
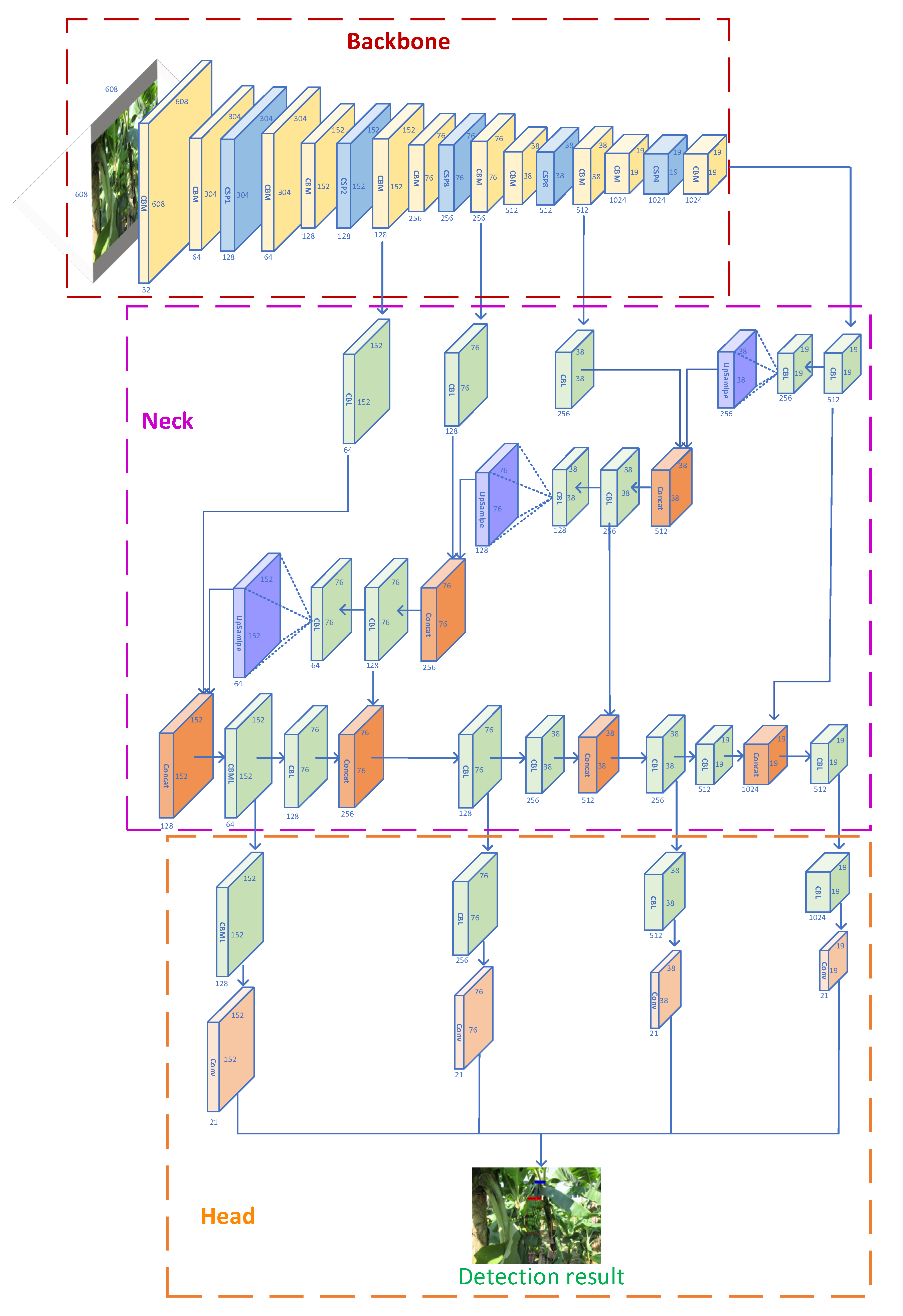
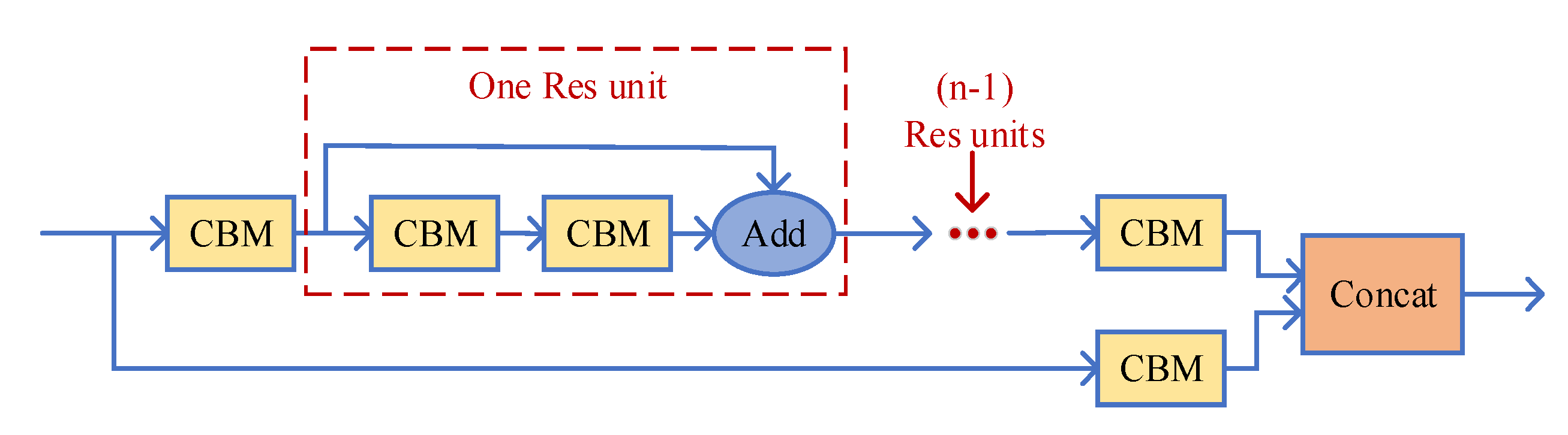
2.3. Improvement Based on YOLOv4
3. Results and Discussion
3.1. Model Evaluation
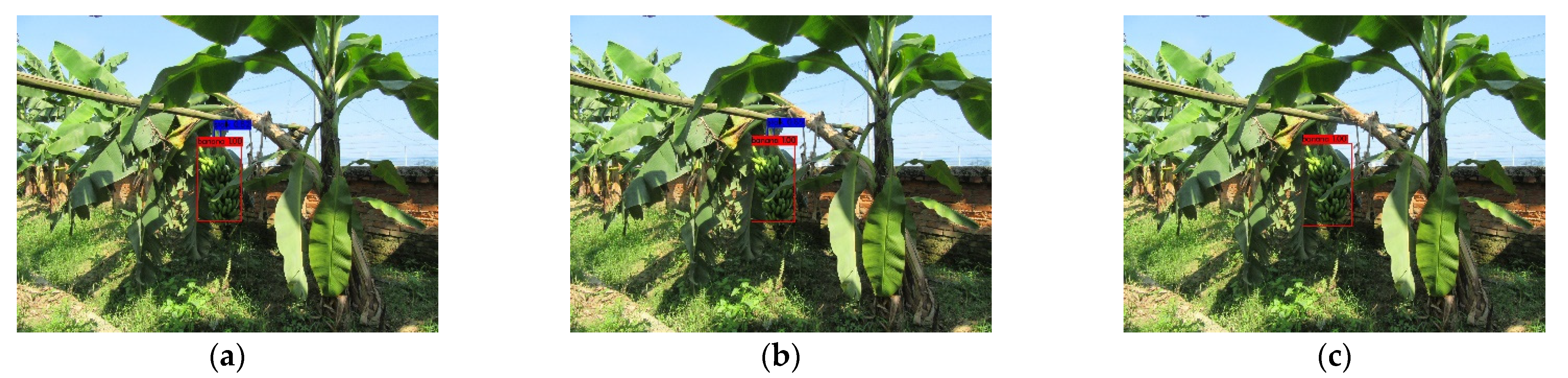
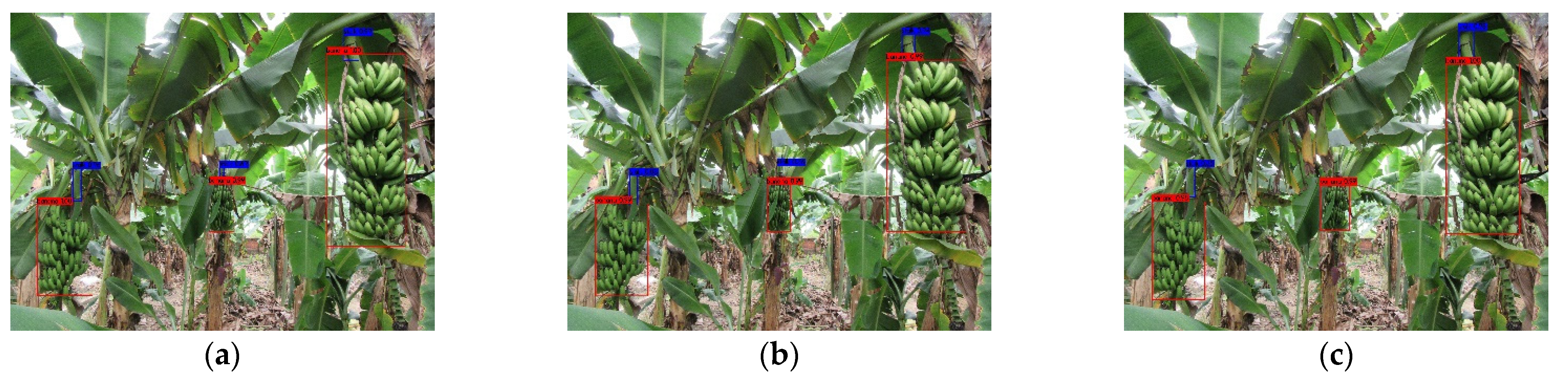
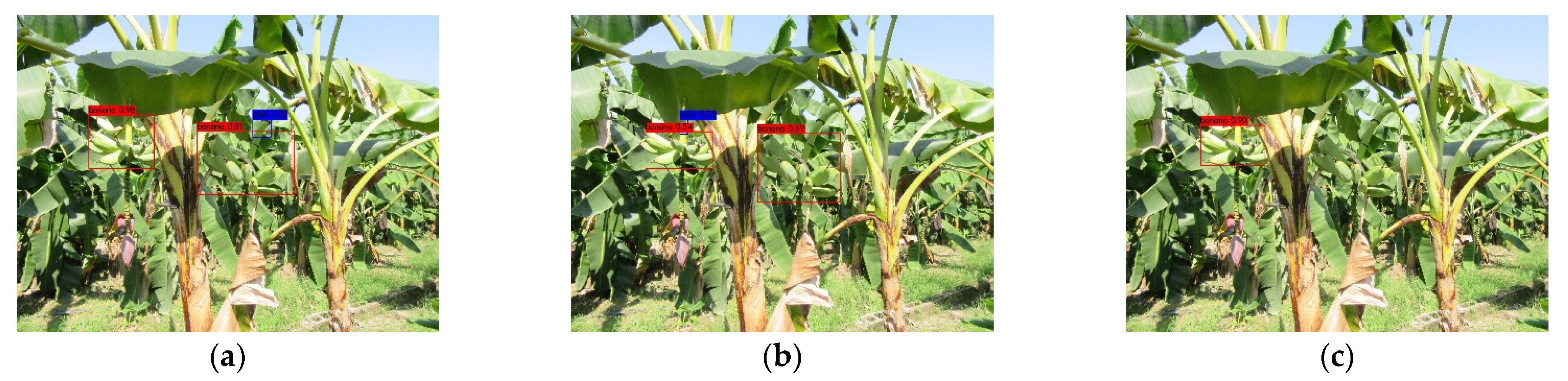
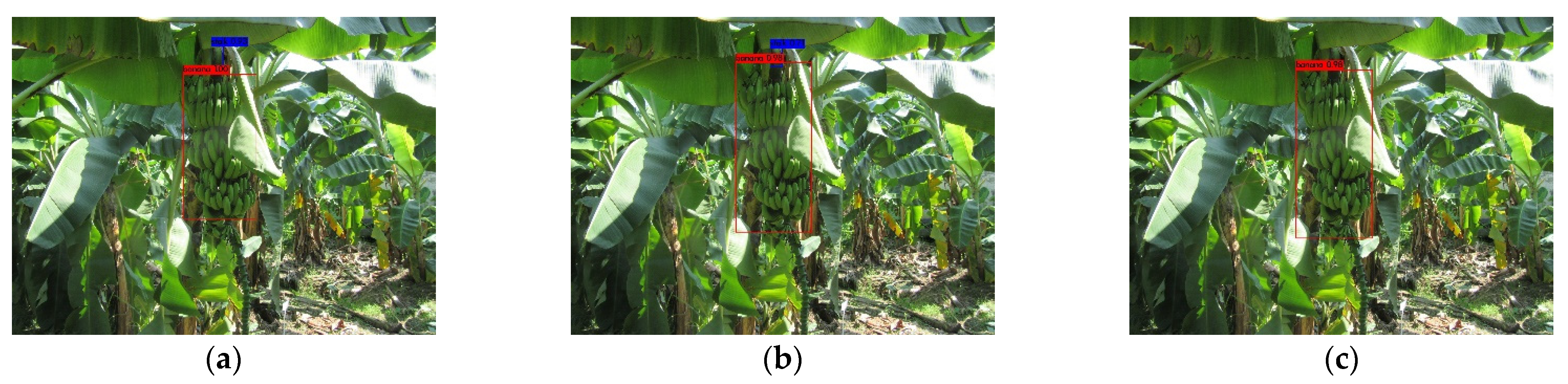
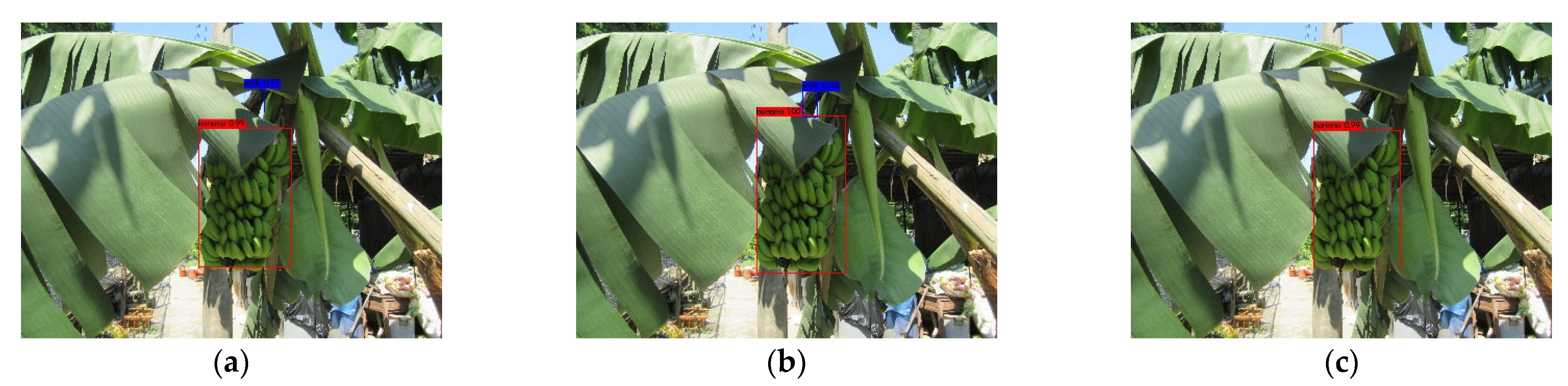
3.2. Detection Results under Different Illumination
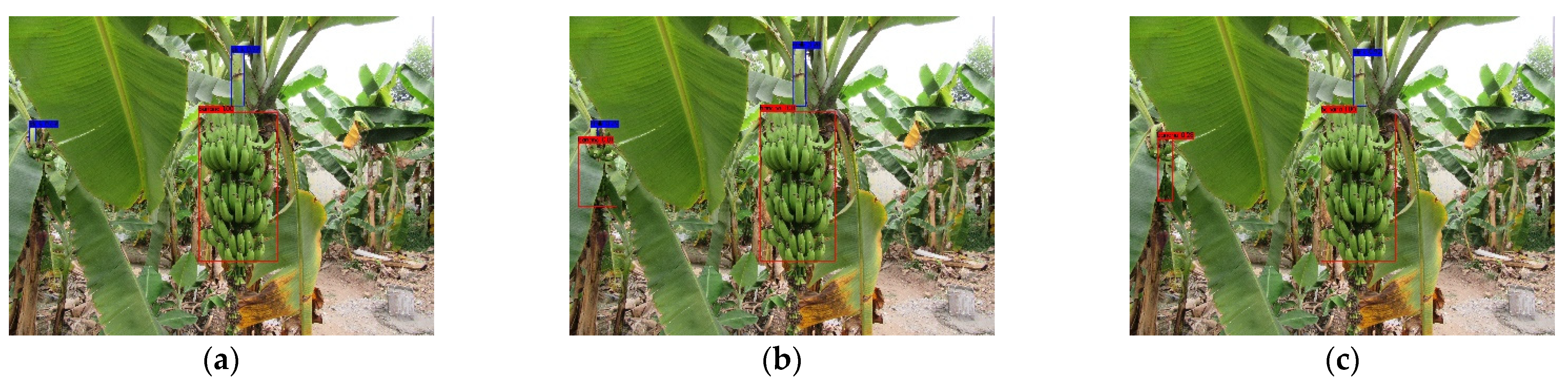
3.3. Detection Results under Different Occlusion Conditions
3.4. Confidence and Detection TIME
3.5. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stevens, B.; Diels, J.; Brown, A.; Bayo, S.; Ndakidemi, P.A.; Swennen, R. Banana Biomass Estimation and Yield Forecasting from Non-Destructive Measurements for Two Contrasting Cultivars and Water Regimes. Agronomy 2020, 10, 1435. [Google Scholar] [CrossRef]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and systems for fruit detection and localization: A review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, M.; Wang, C.; Luo, L.; Li, J.; Lian, G.; Zou, X. Recognition and localization methods for vision-based fruit picking robots: A review. Front. Plant Sci. 2020, 11, 510. [Google Scholar] [CrossRef]
- Wang, C.; Tang, Y.; Zou, X.; Luo, L.; Chen, X. Recognition and Matching of Clustered Mature Litchi Fruits Using Binocular Charge-Coupled Device (CCD) Color Cameras. Sensors 2017, 17, 2564. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Tola, E.; Al-Mallahi, A.; Li, R.; Cui, Y. A novel image processing algorithm to separate linearly clustered kiwifruits. Biosyst. Eng. 2019, 183, 184–195. [Google Scholar] [CrossRef]
- Reis, M.J.C.S.; Morais, R.; Peres, E.; Pereira, C.; Contente, O.; Soares, S.; Valente, A.; Baptista, J.; Ferreira, P.J.S.G.; Bulas Cruz, J. Automatic detection of bunches of grapes in natural environment from color images. J. Appl. Log. 2012, 10, 285–290. [Google Scholar] [CrossRef] [Green Version]
- Cubero, S.; Diago, M.P.; Blasco, J.; Tardáguila, J.; Millán, B.; Aleixos, N. A new method for pedicel/peduncle detection and size assessment of grapevine berries and other fruits by image analysis. Biosyst. Eng. 2014, 117, 62–72. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Lee, W.S.; Zou, X.; Choi, D.; Gan, H.; Diamond, J. Detection and counting of immature green citrus fruit based on the Local Binary Patterns (LBP) feature using illumination-normalized images. Precis. Agric. 2018, 19, 1062–1083. [Google Scholar] [CrossRef]
- Nuske, S.; Wilshusen, K.; Achar, S.; Yoder, L.; Narasimhan, S.; Singh, S. Automated Visual Yield Estimation in Vineyards. J. Field Robot. 2014, 31, 837–860. [Google Scholar] [CrossRef]
- Yamamoto, K.; Guo, W.; Yoshioka, Y.; Ninomiya, S. On Plant Detection of Intact Tomato Fruits Using Image Analysis and Machine Learning Methods. Sensors 2014, 14, 12191–12206. [Google Scholar] [CrossRef] [Green Version]
- Tao, Y.; Zhou, J. Automatic apple recognition based on the fusion of color and 3D feature for robotic fruit picking. Comput. Electron. Agric. 2017, 142, 388–396. [Google Scholar] [CrossRef]
- Fu, L.; Duan, J.; Zou, X.; Lin, G.; Song, S.; Ji, B.; Yang, Z. Banana detection based on color and texture features in the natural environment. Comput. Electron. Agric. 2019, 167, 105057. [Google Scholar] [CrossRef]
- Zhao, Y.; Gong, L.; Huang, Y.; Liu, C. A review of key techniques of vision-based control for harvesting robot. Comput. Electron. Agric. 2016, 127, 311–323. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-Based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Alex, K.; Ilya, S.; Geoffrey, E.H. ImageNet Classification with Deep Convolutional Neural Networks. In NIPSNIPS’12: Proceedings of the 25th International Conference on Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Curran Associates Inc.: Red Hook, NY, USA, 2012; Volume 25, pp. 1097–1105. [Google Scholar]
- Altaheri, H.; Alsulaiman, M.; Muhammad, G. Date Fruit Classification for Robotic Harvesting in a Natural Environment Using Deep Learning. IEEE Access 2019, 7, 117115–117133. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, J.; Fu, L.; Majeed, Y.; Feng, Y.; Li, R.; Cui, Y. Improved kiwifruit detection using pre-trained VGG16 with RGB and NIR information fusion. IEEE Access 2020, 8, 2327–2336. [Google Scholar] [CrossRef]
- Kang, H.; Chen, C. Fruit Detection and Segmentation for Apple Harvesting Using Visual Sensor in Orchards. Sensors 2019, 19, 4599. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- Wang, Y.; Lv, J.; Xu, L.; Gu, Y.; Zou, L.; Ma, Z. A segmentation method for waxberry image under orchard environment. Sci. Hortic. 2020, 266, 109309. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, R.; Zhu, L.; Zhang, S.; Li, X. A method of fast segmentation for banana stalk exploited lightweight multi-feature fusion deep neural network. Machines 2021, 9, 66. [Google Scholar] [CrossRef]
- Majeed, Y.; Karkee, M.; Zhang, Q.; Fu, L.; Whiting, M.D. Determining grapevine cordon shape for automated green shoot thinning using semantic segmentation-based deep learning networks. Comput. Electron. Agric. 2020, 171, 105308. [Google Scholar] [CrossRef]
- Li, J.; Tang, Y.; Zou, X.; Lin, G.; Wang, H. Detection of Fruit-bearing Branches and Localization of Litchi Clusters for Vision-based Harvesting Robots. IEEE Access 2020, 8, 117746–117758. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Huang, Z.; Zhou, H.; Wang, C.; Lian, G. Three-dimensional perception of orchard banana central stock enhanced by adaptive multi-vision technology. Comput. Electron. Agric. 2020, 174, 105508. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Xiong, J.; Li, J. Guava detection and pose estimation using a low-cost RGB-D sensor in the field. Sensors 2019, 19, 428. [Google Scholar] [CrossRef] [Green Version]
- Mu, Y.; Chen, T.; Ninomiya, S.; Guo, W. Intact detection of highly occluded immature tomatoes on plants using deep learning techniques. Sensors 2020, 20, 2984. [Google Scholar] [CrossRef]
- Neupane, B.; Horanont, T.; Hung, N.D. Deep learning based banana plant detection and counting using high-resolution red-green-blue (RGB) images collected from unmanned aerial vehicle (UAV). PLoS ONE 2019, 14, e0223906. [Google Scholar] [CrossRef]
- Cheng, Z.; Zhang, F. Flower End-to-End Detection Based on YOLOv4 Using a Mobile Device. Wirel. Commun. Mob. Comput. 2020, 2020, 1–9. [Google Scholar] [CrossRef]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [Green Version]
- Vasconez, J.P.; Delpiano, J.; Vougioukas, S.; Cheein, F.A. Comparison of convolutional neural networks in fruit detection and counting: A comprehensive evaluation. Comput. Electron. Agric. 2020, 173, 105348. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, Z.; Zhou, H.; Chen, S. 3D global mapping of large-scale unstructured orchard integrating eye-in-hand stereo vision and SLAM. Comput. Electron. Agric. 2021, 187, 106237. [Google Scholar] [CrossRef]
- Boogaard, F.P.; Rongen, K.S.A.H.; Kootstra, G.W. Robust node detection and tracking in fruit-vegetable crops using deep learning and multi-view imaging. Biosyst. Eng. 2020, 192, 117–132. [Google Scholar] [CrossRef]
- Suo, R.; Gao, F.; Zhou, Z.; Fu, L.; Song, Z.; Dhupia, J.; Li, R.; Cui, Y. Improved multi-classes kiwifruit detection in orchard to avoid collisions during robotic picking. Comput. Electron. Agric. 2021, 182, 106052. [Google Scholar] [CrossRef]
- Xie, H.; Dai, N.; Yang, X.; Zhan, K.; Liu, J. Research on recognition methods of pomelo fruit hanging on trees base on machine vision. In 2019 ASABE Annual International Meeting; American Society of Agricultural and Biological Engineers: Boston, MA, USA, 2019; p. 1900411. [Google Scholar]
- Santos, T.T.; de Souza, L.L.; Dos Santos, A.A.; Avila, S. Grape detection, segmentation, and tracking using deep neural networks and three-dimensional association. Comput. Electron. Agric. 2020, 170, 105247. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Duan, J.; Zou, X.; Lin, J.; Zhao, L.; Li, J.; Yang, Z. Fast and accurate detection of banana fruits in complex background orchards. IEEE Access 2020, 8, 196835–196846. [Google Scholar] [CrossRef]
- Zhang, R.; Li, X.; Zhu, L.; Zhong, M.; Gao, Y. Target detection of banana string and fruit stalk based on YOLOv3 deep learning network. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE2021), Nanchang, China, 26–28 March 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 346–349. [Google Scholar]
- Koirala, A.; Walsh, K.B.; Wang, Z.; McCarthy, C. Deep learning for real-time fruit detection and orchard fruit load estimation: Benchmarking of ‘MangoYOLO’. Precis. Agric. 2019, 20, 1107–1135. [Google Scholar] [CrossRef]
- Liu, G.; Nouaze, J.C.; Touko Mbouembe, P.L.; Kim, J.H. YOLO-Tomato: A Robust Algorithm for Tomato Detection Based on YOLOv3. Sensors 2020, 20, 2145. [Google Scholar] [CrossRef] [Green Version]
- Lawal, O.M. YOLOMuskmelon: Quest for Fruit Detection Speed and Accuracy Using Deep Learning. IEEE Access 2021, 9, 15221–15227. [Google Scholar] [CrossRef]
- Wu, F.; Duan, J.; Chen, S.; Ye, Y.; Ai, P.; Yang, Z. Multi-target recognition of bananas and automatic positioning for the inflorescence axis cutting point. Front. Plant Sci. 2021, 12, 705021. [Google Scholar] [CrossRef]
- Yan, B.; Fan, P.; Lei, X.; Liu, Z.; Yang, F. A Real-Time Apple Targets Detection Method for Picking Robot Based on Improved YOLOv5. Remote Sens. 2021, 13, 1619. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Input (Resolution) | Layers | Backbone | Neck | Bounding Boxes in Each Grid | Prediction (Resolution) |
|---|---|---|---|---|---|---|
| YOLOv1 | 448 × 448 | 24 | Darknet19 | -- | 2 | 13 × 13 |
| YOLOv2 | 448 × 448 | 32 | Darknet19 | -- | 5 | 13 × 13 |
| YOLOv3 | 416 × 416 | 106 | Darknet53 | FPN | 9 | 13 × 13, 26 × 26, 52 × 52 |
| YOLOv4 | 608 × 608 | 161 | CSPDarknet53 | FPN + PAN | 9 | 19 × 19, 38 × 38, 76 × 76 |
| YOLOv5 | 608 × 608 | -- | CSPDarknet53 | FPN + PAN | 9 | 19 × 19, 38 × 38, 76 × 76 |
| Model | Iteration | Input (Resolution) | Training Time (h) |
|---|---|---|---|
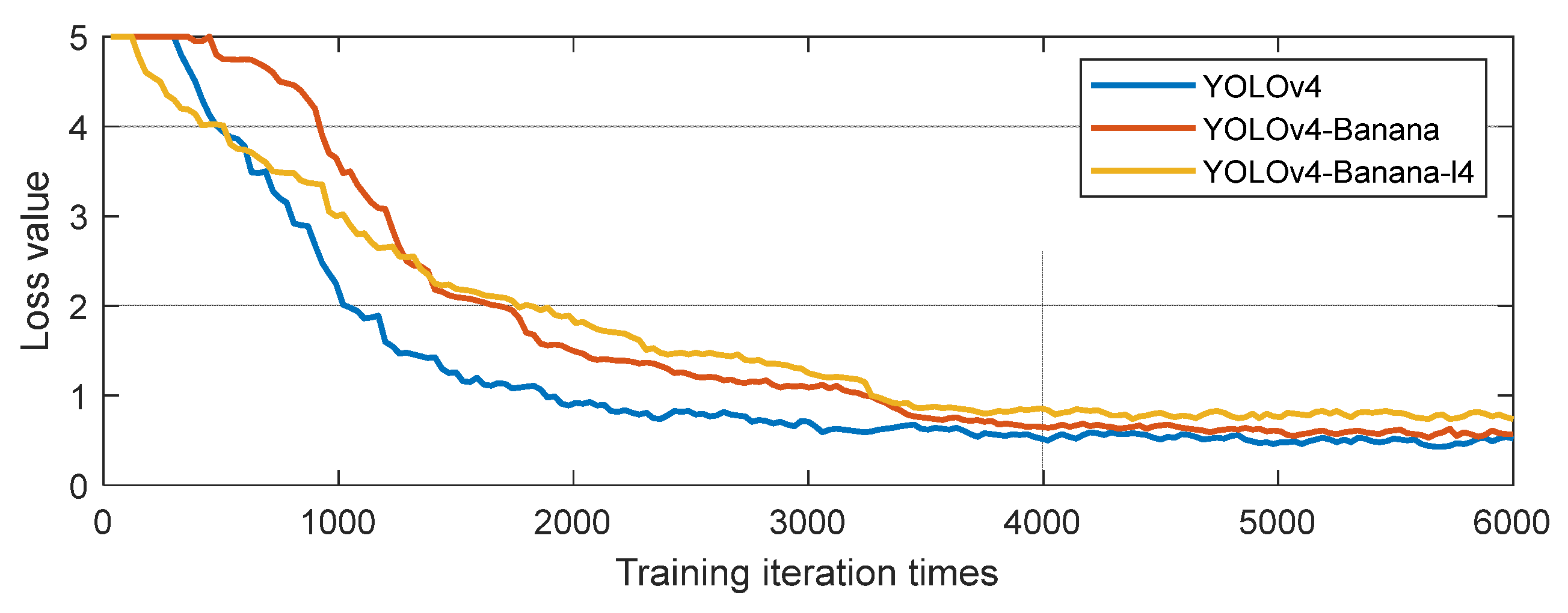
| YOLOv4 | 6000 | 608 × 608 | 26.6 |
| YOLO-Banana | 6000 | 608 × 608 | 21.2 |
| YOLO-Banana-l4 | 6000 | 608 × 608 | 24.1 |
| Model | AP | mAP (%) | Layer | Weight (MB) | |
|---|---|---|---|---|---|
| Banana (%) | Stalk (%) | ||||
| YOLOv4 | 99.55 | 87.82 | 93.69 | 161 | 244 |
| YOLO-Banana | 98.4 | 85.98 | 92.19 | 134 | 137 |
| YOLO-Banana-l4 | 96.84 | 82.68 | 89.76 | 147 | 138 |
| Illumination | Object | Model | Count | Correctly Detected | Falsely Detected | Missed | |||
|---|---|---|---|---|---|---|---|---|---|
| Amount | Rate (%) | Amount | Rate (%) | Amount | Rate (%) | ||||
| Sunny | Banana | YOLOv4 | 80 | 79 | 98.75 | 0 | 0 | 1 | 1.25 |
| YOLO-Banana | 80 | 79 | 98.75 | 0 | 0 | 1 | 1.25 | ||
| YOLO-Banana-l4 | 80 | 78 | 97.5 | 0 | 0 | 2 | 2.5 | ||
| Stalk | YOLOv4 | 65 | 59 | 90.77 | 1 | 1.54 | 6 | 9.23 | |
| YOLO-Banana | 65 | 58 | 89.23 | 2 | 3.08 | 7 | 10.77 | ||
| YOLO-Banana-l4 | 65 | 57 | 87.69 | 1 | 1.54 | 8 | 12.31 | ||
| Cloudy | Banana | YOLOv4 | 83 | 83 | 100 | 0 | 0 | 0 | 0 |
| YOLO-Banana | 83 | 82 | 98.8 | 0 | 0 | 1 | 1.2 | ||
| YOLO-Banana-l4 | 83 | 79 | 95.18 | 0 | 0 | 4 | 4.82 | ||
| Stalk | YOLOv4 | 76 | 69 | 90.79 | 1 | 1.32 | 7 | 9.21 | |
| YOLO-Banana | 76 | 69 | 90.79 | 2 | 2.63 | 7 | 9.21 | ||
| YOLO-Banana-l4 | 76 | 65 | 85.53 | 4 | 5.26 | 11 | 14.74 | ||
| Occlusion | Object | Model | Count | Correctly Detected | Falsely Detected | Missed | |||
|---|---|---|---|---|---|---|---|---|---|
| Amount | Rate (%) | Amount | Rate (%) | Amount | Rate (%) | ||||
| Slight | Banana | YOLOv4 | 50 | 50 | 100 | 0 | 0 | 0 | 0 |
| YOLO-Banana | 50 | 50 | 100 | 0 | 0 | 0 | 0 | ||
| YOLO-Banana-l4 | 50 | 50 | 100 | 0 | 0 | 0 | 0 | ||
| Stalk | YOLOv4 | 46 | 40 | 86.96 | 1 | 2.17 | 3 | 6.52 | |
| YOLO-Banana | 46 | 42 | 91.3 | 2 | 4.35 | 4 | 8.7 | ||
| YOLO-Banana-l4 | 46 | 39 | 84.78 | 2 | 4.35 | 5 | 10.87 | ||
| Severe | Banana | YOLOv4 | 19 | 18 | 94.74 | 0 | 0 | 1 | 5.26 |
| YOLO-Banana | 19 | 17 | 89.47 | 0 | 0 | 2 | 10.53 | ||
| YOLO-Banana-l4 | 19 | 13 | 68.42 | 0 | 0 | 6 | 31.58 | ||
| Stalk | YOLOv4 | 13 | 10 | 76.92 | 0 | 0 | 6 | 46.15 | |
| YOLO-Banana | 13 | 9 | 69.23 | 0 | 0 | 4 | 30.77 | ||
| YOLO-Banana-l4 | 13 | 8 | 61.53 | 0 | 0 | 6 | 46.15 | ||
| Model | Average Confidence | Time (ms) | |
|---|---|---|---|
| Banana | Stalk | ||
| YOLOv4 | 0.96 | 0.91 | 44.96 |
| YOLO-Banana | 0.94 | 0.89 | 35.33 |
| YOLO-Banana-l4 | 0.92 | 0.88 | 38.19 |
| Model | Hardware Platform | AP | mAP (%) | Time (ms) | |
|---|---|---|---|---|---|
| Banana (%) | Stalk (%) | ||||
| YOLOv4 | IntelI CoITM) i7—9750H @2.6 GHz 2.59GHz, 16.0 GB RAM, NVIDIA GeForce RTX 2070 with Max-Q Design | 99.55 | 87.82 | 93.69 | 44.96 |
| YOLO-Banana | 98.4 | 85.98 | 92.19 | 35.33 | |
| YOLOv3 [37] | 2 GeForce RTX 2080 GPUIntIR) Xeon(R) CPU E5-2620 v4 @2.10GHz 2.10 GHz(2 processors) | 88 | 98 | 93 | unknown |
| Improved YOLOv3 [41] | i7-7700K processor, memory 16G,2,400 MHz; video card GTX1080Ti 11G | 94 | undetected | -- | 240 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, L.; Yang, Z.; Wu, F.; Zou, X.; Lin, J.; Cao, Y.; Duan, J. YOLO-Banana: A Lightweight Neural Network for Rapid Detection of Banana Bunches and Stalks in the Natural Environment. Agronomy 2022, 12, 391. https://doi.org/10.3390/agronomy12020391
Fu L, Yang Z, Wu F, Zou X, Lin J, Cao Y, Duan J. YOLO-Banana: A Lightweight Neural Network for Rapid Detection of Banana Bunches and Stalks in the Natural Environment. Agronomy. 2022; 12(2):391. https://doi.org/10.3390/agronomy12020391
Chicago/Turabian StyleFu, Lanhui, Zhou Yang, Fengyun Wu, Xiangjun Zou, Jiaquan Lin, Yongjun Cao, and Jieli Duan. 2022. "YOLO-Banana: A Lightweight Neural Network for Rapid Detection of Banana Bunches and Stalks in the Natural Environment" Agronomy 12, no. 2: 391. https://doi.org/10.3390/agronomy12020391