1. Introduction
In recent years, biostructural materials have gained great interest because they exhibit mechanical properties that far exceed those of synthetic materials [
1,
2,
3,
4,
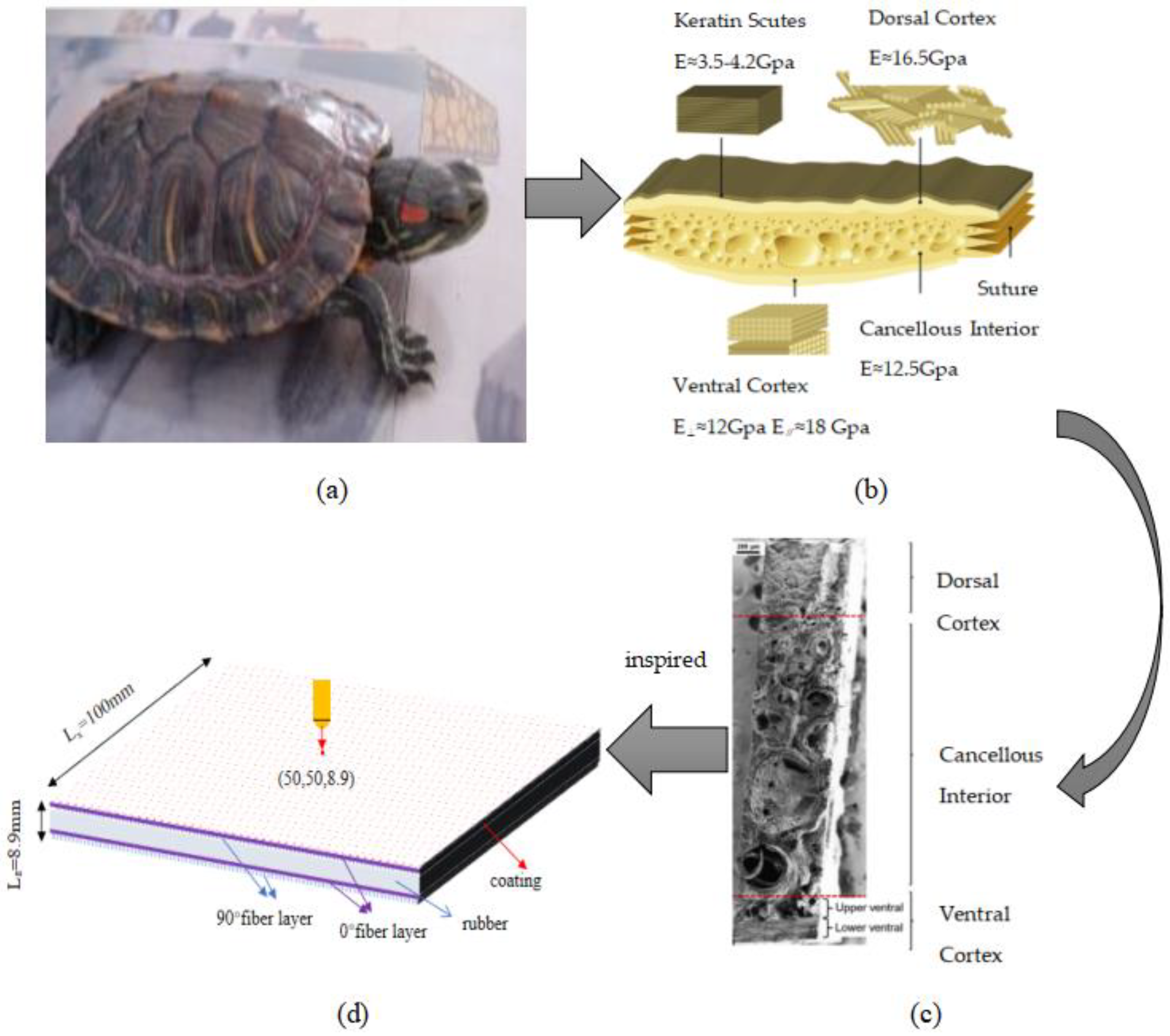
5]. As a typical sandwich structure, they have evolved a complex hierarchy through long-term natural selection, usually consisting of a keratin layer, a dorsal cortical layer, a middle foamy cancellous bone layer, and an abdominal cortical layer, which is considered a defense structure against environmental intrusion to resist extreme mechanical forces, which include sharp, high-strain-rate attacks of crocodiles [
6,
7]. In this paper, we designed a bionic sandwich structure with unique properties based on the red-eared slider turtle shell, which can be used in protective armor and panel structures such as aircraft wings, floors, and ship hull shells.
So far, researchers at home and abroad have carried out some experimental and numerical simulations of composite structural materials of bionic tortoiseshell back armor. Xu Zhang [
8] systematically analyzed the damage behavior of tortoise shells under different immersion times and impact cycles and investigated the impact kinetic behavior of tortoise shells during impact wear, which provided a reliable experimental basis for the design of bionic materials. Professor Fengchun Jiang’s group at Harbin Engineering University designed a multilayer composite material with alternating superimposed titanium metal plates and silicon carbide fiber-reinforced aluminum matrix composite plates, and the strength and toughness of the composite structural material were significantly improved [
9]. Pei, BQ [
10] studied the chemical composition of the shell structure and its mechanical properties by investigating the composition of the compounds in various parts of the shell, based on the shell keratin sheath and spongy bone. Based on the microstructure of the carapace keratin sheath, spongy bone and spine, a bionic sandwich structure consisting of plate, core and back plate was designed by using modeling software. The impact resistance of the bionic structure was verified by finite element analysis and drop hammer experiments. Numerical results showed that all the bionic structures showed different degrees of impact resistance improvement compared to the control group. Prasad, N [
11] generated functionally graded two-stage fiber concrete composed of steel and polypropylene fibers based on the impact resistance bionic of turtle shells to enhance impact resistance and damage mitigation.
Considering that the turtle shell may be impacted from all directions along with the purpose of the designed synthetic bionic sandwich structure, these areas are vulnerable to the impact of foreign objects, such as debris thrown from the runway during landing, birds in the sky, etc., which may cause serious damage to the target structure [
12]. At the same time, in a real situation, there are very few cases that completely satisfy the vertical impact, the impact of foreign objects on the sandwich structure often comes with a certain angle, and the direct adoption of the findings of positive impact to explain the widely occurring events of different impact angles, in reality, is not based on sufficient evidence. The specific damage pattern of the sandwich structure after the impact of foreign objects is very complex, and the damage and energy absorption become more complicated when coupled with the frictional slip effect existing at different impact angles [
13]. In this paper, a survey of the literature on the effect of the impact angle on sandwich structures was conducted. Pascal et al. [
14] studied the damage mechanism of sandwich structures with different stacking sequences at tilt angles of less than 15 degrees. Boonkong et al. [
15] experimentally investigated the low-velocity impact response of curved aluminum alloy sandwich panels at different impact angles, analyzed their energy absorption characteristics and corresponding failure mechanisms, and found that the perforation increased with the increase of the impact angle. Chen, Kai et al. [
16] explored the effect of impact angle on the dynamic response of a steel trapezoidal corrugated sandwich plate in their simulation model and concluded that the reason why the dynamic response of the structure is more affected by the impact angle is the different contact area between the falling hammer and the structure due to the difference in impact angle.
Although a great deal of research has been conducted on tortoiseshell back armor bionics, it has been limited to three-layer sandwich structures composed of foam and honeycomb, balsa wood, etc. Compared with these sandwich structures, there is a lack of more comprehensive experimental studies on rubber sandwich structures. Foamed silicone rubber sheet is one of the good core materials. As a kind of rubber with low density, it is light, soft, elastic, not easy to transfer heat, and has excellent mechanical properties such as anti-shock, impact mitigation, thermal insulation, and sound insulation. In addition, although a lot of research has been conducted on the mechanical properties of sandwich structures under different impact angles, when the impact angle is large, the test conditions are limited by the test and the test is difficult to implement, and scholarly studies of the oblique impact conditions are often based on a specific angle; the mechanical properties of rubber sandwich structures under different impact angles are still lacking a more comprehensive study. Under impact conditions, the sandwich structure will definitely produce damage, which is also inevitably accompanied by the transformation and transfer of energy, and it is important to explore the damage mechanism to improve the impact resistance of the bionic sandwich structure. In view of this, this paper focuses on the analysis and discussion of the impact angle and speed of the impact on the effect of damage on the foamed silicone rubber sandwich structure.
3. Results and Discussion
3.1. Energy Change
In order to gain insight into the effect of the impact angle on the impact resistance of the sandwich structure, more than 30 impact simulations were conducted in this study, with the falling hammer impacting the sandwich structure at 4.970 m/s, 5.495 m/s, 5.973 m/s, 6.419 m/s, 6.830 m/s, and 8 m/s, respectively. vr is the residual velocity. When vr is negative, it means the falling hammer bounces off the sandwich structure, and a positive value means the falling hammer penetrates the sandwich structure.
The relationship between the initial and residual velocities of the impact at different angles was obtained from the data in
Table 2, and the curve was fitted using the Levenberg–Marquardt optimization algorithm based on the data and the following equation (R
2 > 0.99) as shown in
Figure 5, with the expression valid only for
vi >
vthreshold.
where A, B, and
vthreshold are the fitting parameters;
vi is the initial velocity of the impact; and
vthreshold is defined as the velocity penetration threshold at a given angle.
As shown in
Figure 6, the penetration thresholds at 30°, 45°, 60°, 75°, and 90° can be obtained from the regression curves in
Figure 5 as 6.747 m/s, 5.968 m/s, 5.640 m/s, 5.482 m/s, and 5.466 m/s, respectively. From this, it can be seen that the impact resistance decreases with the increase of impact angle by 11.5%, 16.4%, 18.7%, and 18.9% when the impact angle is greater than 45° and, with the increase of impact angle, the difference of impact threshold becomes smaller and smaller. When the impact angle is greater than 75°, compared with 90°, the difference of impact resistance performance is only 2.9%; at this time the impact angle has less impact resistance performance.
In summary, the smaller the impact angle is, the more energy is absorbed; therefore, 90° is the most unfavorable impact angle to the structure deformation, and avoiding the impact from the frontal side of the sandwich structure can effectively reduce the damage degree of the sandwich structure. Analysis: as the impact angle decreases, the separation between the core layer and the panel along the outer side of the falling hammer trajectory becomes more and more obvious, and the damage mode of the sandwich structure changes from shear damage to tensile damage and the path of the falling hammer through the sandwich structure becomes longer as the impact angle decreases, so the absorbed energy increases. This phenomenon indicates that the change of the path of the drop hammer through the sandwich structure at different impact angles has a greater effect on the energy absorption of the rubber sandwich structure.
3.2. Mechanical Response Analysis
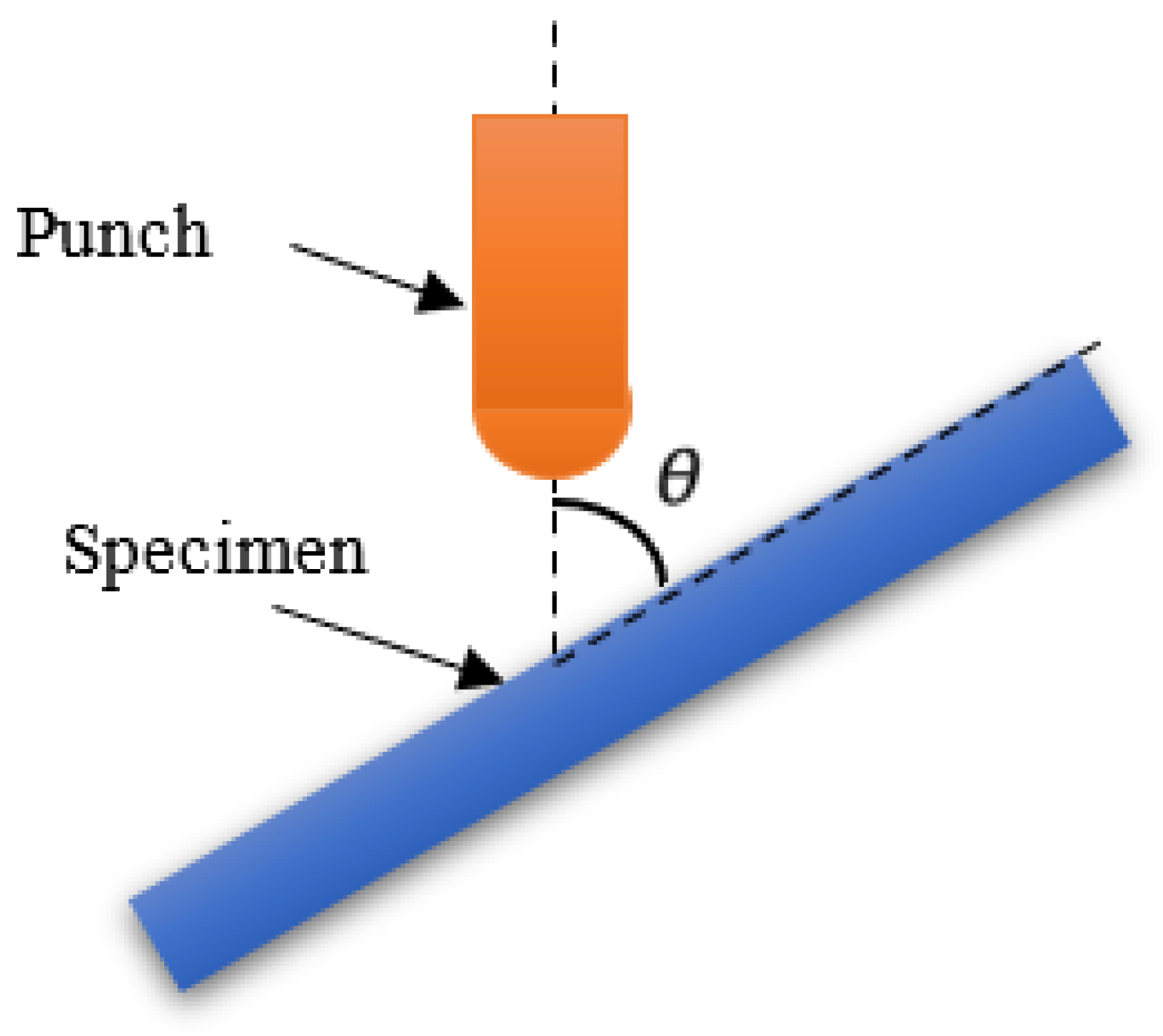
A diagram comparing positive impact (impact angle of 90°) with oblique impact (impact angles of 30°, 45°, 60°, and 75°) is shown in
Figure 7. Under the low-speed oblique impact condition, the hemispherical drop hammer first makes a point of contact with the sandwich structure and then continuously presses down on the sandwich structure. At this time, the contact area between the drop hammer and the specimen becomes elliptical. Because of the angle between the drop hammer and the sandwich structure, the drop hammer will produce a certain amount of slip on the upper panel of the sandwich structure, so the loading process of the drop hammer is tangential slip and normal loading at the same time, the deformation shape of the sandwich structure is constantly changing and expanding tangentially, and the position of the drop hammer on the sandwich structure is also constantly changing. When the kinetic energy of the hammer is completely dissipated, the elastic strain energy of the sandwich structure starts to be released and the hammer starts to rebound. In the rebound process of the drop hammer, because the drop hammer only has the translational freedom in the
Z-axis direction, the drop hammer will still slide on the surface of the sandwich structure during the rebound process, and the frictional dissipation energy will be generated until the drop hammer is out of contact with the sandwich structure.
However, under positive impact conditions, the shape of the contact deformation generated during the loading of the drop hammer on the sandwich structure is always circular and always in a symmetrical state. Although there is a slight slip of the drop hammer on the sandwich structure when the deformation occurs, the slip is so small that the friction loss is almost negligible, so the kinetic energy of the drop hammer can be considered to be completely dissipated by the sandwich structure in the form of internal damage. When the kinetic energy of the falling hammer is completely dissipated, the elastic strain energy accumulated in the sandwich structure starts to be released, and the sandwich structure starts to push the falling hammer to rebound. Since there is no tilting relationship between the hammer and the sandwich structure at this time, there is almost no friction loss during the rebound process, so the process can be considered as only the conversion of the elastic strain energy of the sandwich structure to the kinetic energy of the hammer until the hammer is out of contact with the sandwich structure and the positive impact process is finished.
The contact force displacement curves of the sandwich structure under different impact angles with impact velocities of 4.970 m/s and 6.830 m/s are shown in
Figure 8. It can be seen from the curves that when the impact velocity is 4.970 m/s, the load goes through two rises and two falls, and the sudden fall of the load is due to the compression damage of the substrate in the impact area. In the rebound phase, the curve is relatively stable, and finally, the hammer head is out of contact with the sandwich structure, and the load disappears. When the impact speed is 6.830 m/s, the sandwich structure is completely penetrated at various impact angles, and no rebound occurs. It can be seen from the figure that in the case of oblique impact, whether the falling hammer partially bounces or the falling hammer completely penetrates the core structure, the peak contact force is positively correlated with the impact angle, and the displacement under the maximum load is negatively correlated with the impact angle. In the positive impact case, the friction force is very small and almost negligible, and its maximum contact force is slightly less than 75°.
When the impact angle is less than 45°, the tangential impact force becomes larger than the normal impact force, and the slip of the hammer becomes easier. As the hammer slides, it changes its position on the sandwich structure. As the position changes, the units that were farther away from the hammer begin to join the impact resistance process of the hammer, and these newly added units will continuously deform in flexure to absorb the kinetic energy of the hammer. Although the impact angle increases when the hammer slide increases the new unit damage, the easier the slide also means that the greater the frictional energy dissipation, which leads to a large amount of kinetic energy of the hammer being dissipated through the slide in the form of frictional heat, so the actual impact energy loaded into the sandwich structure plate is not much, which leads to the structure only being the expansion of the damage area, while tilting the impact of the hammer and the contact area of the sandwich structure. At the same time, the contact area between the falling hammer and the sandwich structure is relatively increased, so the overall damage will be reduced.
3.3. Failure Modes
Different failure modes were observed at different velocities. This subsection is analyzed for v = 4.970 m/s (less than the penetration threshold) and 6.830 m/s (greater than the penetration threshold) velocities, respectively.
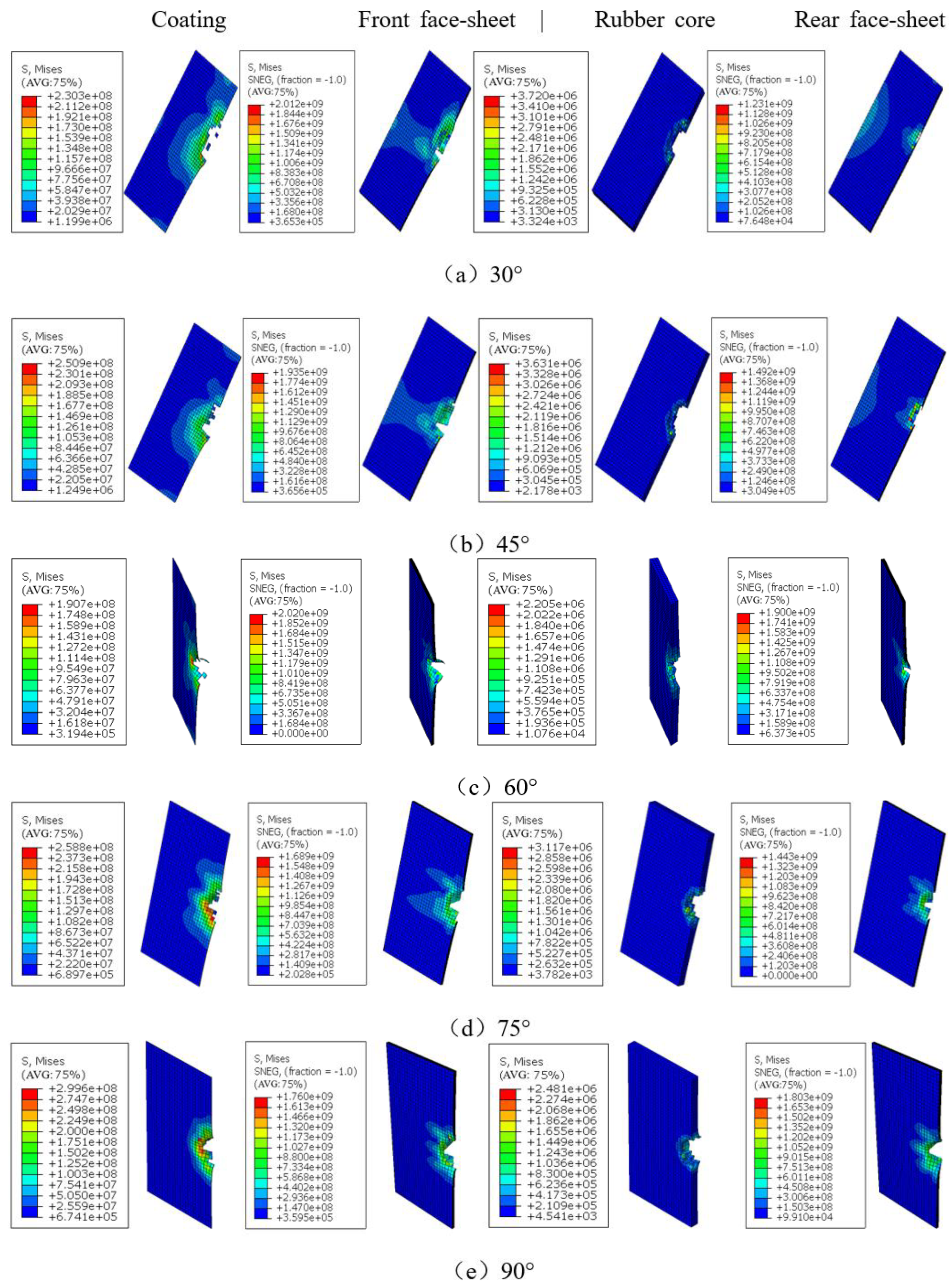
Figure 9 shows the final damage and stress clouds of each profile of the sandwich structure under different angles of impact at
v = 4.970 m/s. According to
Figure 9, it can be seen that the structure will always produce craters after the impact of the falling hammer regardless of the change of the impact angle, but the center of the craters will change, which is more obvious when the impact angle is small. As the impact angle decreases from 90° (positive impact), the slip becomes more and more, and the center of the crater moves in the direction of the slip, accordingly. The nature of the crater is the plastic deformation of the sandwich structure to absorb the energy after the impact load is applied. Comprehensive
Table 2 and
Figure 9 show that at
v = 4.970 m/s, the impact head bounced to different degrees at various impact angles, and the sandwich structure was not completely penetrated, but the bottom panel had different degrees of damage, of which 90° damage was the most serious. When the impact hammer head penetrated the coating, the upper panel, and the core, the coating of the sandwich structure was broken, the upper surface had fiber fracture, and the core was broken, which were caused by the shearing process, and these damages appeared independent of the impact velocity. As the impact velocity was below the penetration threshold, the bottom panel showed matrix cracks. In addition, it is obvious that when excluding the energy consumed by slip friction, most of the impact energy loaded onto the structure is mainly consumed through plastic deformation of the upper panel and flexural deformation of the core unit, and the deformation of the lower panel under low-energy impact is extremely small and almost does not participate in energy absorption. When the impact is oblique, craters appear in the coating, the upper panel, and the core, and cracks extend from the edges of the craters.
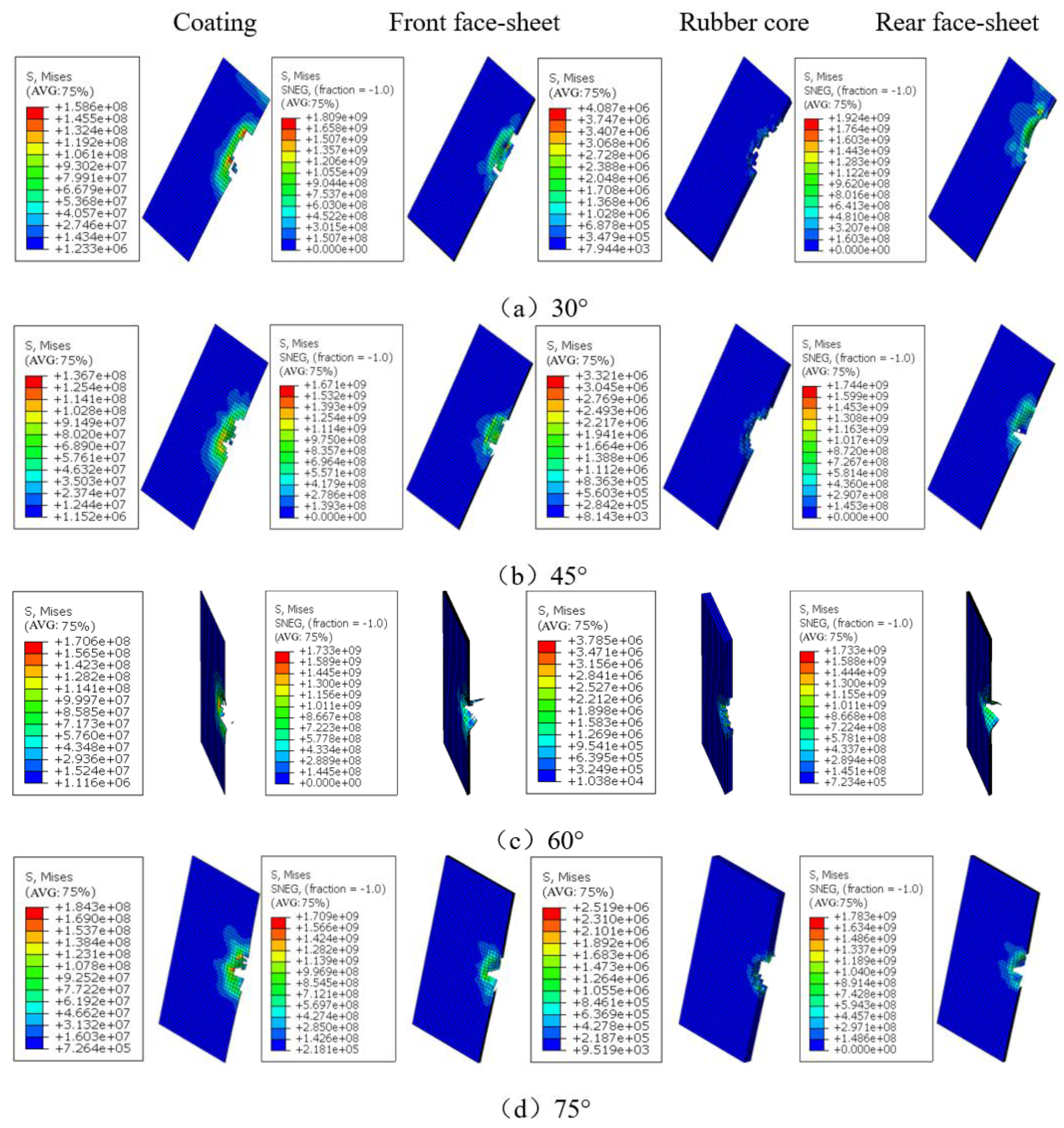
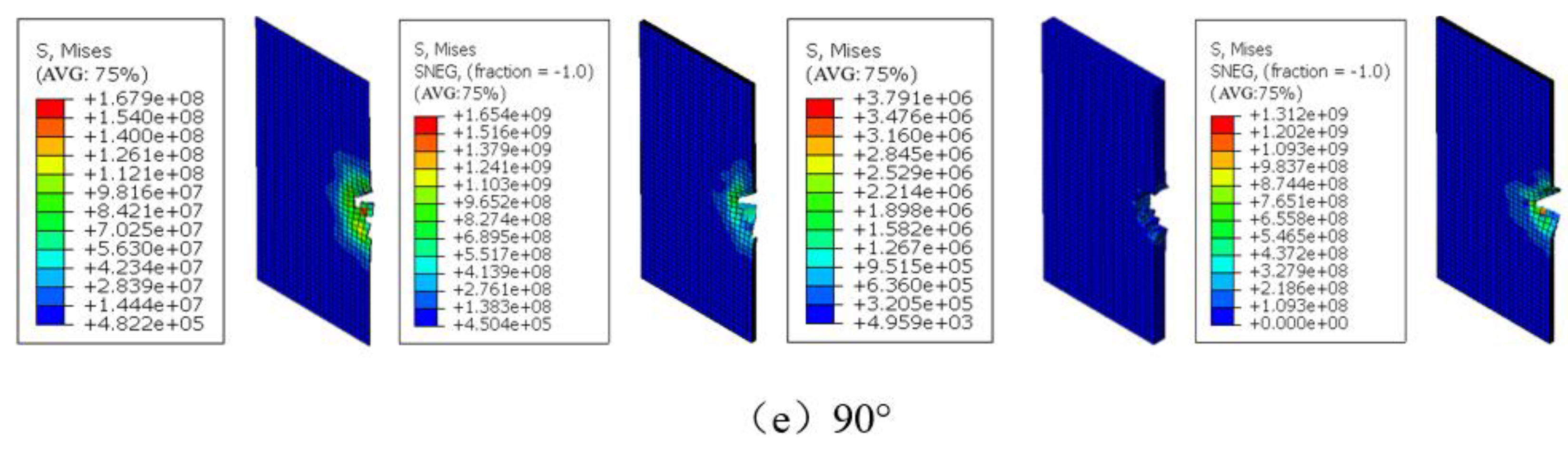
Figure 10 shows the damage to the coating, the upper panel, the rubber core, and the bottom panel of the sandwich structure at
v = 6.830 m/s and at different angles. Combining
Table 2 and
Figure 10, it can be seen that the sandwich structure was penetrated at
v = 6.830 m/s at various impact angles. Compared with an impact velocity greater than the penetration threshold at
v = 4.970 m/s, there is extensive fiber fracture in the bottom panel due to the indentation of the falling hammer, and further indentation expands the fiber fracture area and the spalling of the bottom panel, which leads to the cracking of the bottom panel matrix. The edges of the bottom panel fiber fracture were jagged, consistent with the edge morphology of tensile fracture, and it was determined that the bending tensile stress along the fiber direction caused the bottom panel fiber fracture. When the impact angle was 30°, the impact velocity was greater than the penetration threshold, the path of the falling hammer along the plane of the sandwich structure was too long, and the contact area was large, extensive fiber fracture and delamination occurred in the top panel, and the bottom panel showed a damage pattern similar to that of normal impact. Similarly, combined with
Figure 9 and
Figure 10, it can be seen that at the same impact energy, the oblique impact always produced less damage in the lower panel of the sandwich structure than the positive impact.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}