3.1. Performance Characterization of Flexible Fiber
In order to quantitatively evaluate the mechanical and optical properties of flexible optical fibers, a series of performance tests were carried out, including tensile strain, bending and torsion tests. The strain-normalized intensity curve of core-clad fiber at wavelength 650 nm is shown in
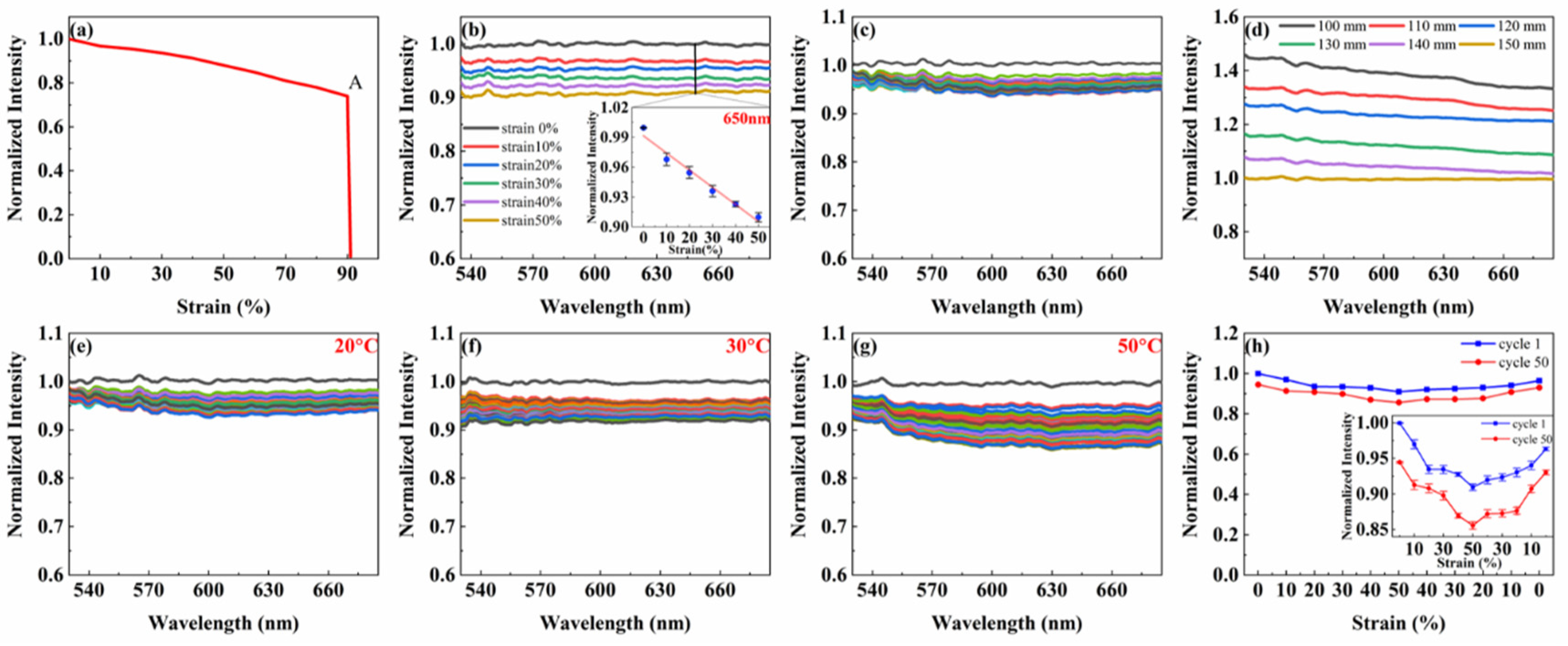
Figure 3a. It can be seen that the optical fiber retains its mechanical integrity under 90% strain. When the strain increases from 90% to 100%, the strain-normalized intensity curve of the fiber shows a breaking point: A. This indicates that the fiber will not completely break until the strain is greater than 90%. In addition, based on the linear region of the strain-normalized light intensity curve, the tensile strains ranging from 0% to 50% were applied to the fiber at a strain interval of 10%. The normalized spectra under different strain states were measured. These are shown in
Figure 3b. With the increase of the tensile strain applied to the fiber, the normalized light intensity through the fiber gradually decreased. When the elongation of the fiber reached 50%, the intensity of light passing through the fiber was lost by about 10%. The inset in
Figure 3b shows the strain-normalized intensity curve of the fiber at the wavelength of 650 nm during stretching. It shows that the normalized light intensity of the fiber decreases by about 9% as the tensile strain of the fiber increases from 0% to 50%. This is basically consistent with the curve in
Figure 3a. Therefore, the deformation sensor selected the SMD red beads with LED patch as the light source.
To further study the mechanical properties of flexible optical fibers, we defined a period of stretching strain from 0% to 50% and then back to 0%. The fiber was repeatedly stretched for 50 cycles. The normalized spectra of the fiber in the wavelength range of 530~685 nm after each cycle are shown in
Figure 3c. In this cycling process, the normalized light intensity in the fiber decreased from 1.00 to about 0.98 after the first cycle. But in the following 49 cycles, the normalized light intensity in the fiber gradually stabilized between 0.94 and 0.98 after each cycle. This is due to the Mullins effect, which describes the stress softening and hysteresis that occurs in elastic materials [
31]. Therefore, to ameliorate the adverse effects, each fiber used for sensing was pretreated at least 50 times in a cycle from 0% strain to 50% strain. In practice, the pretreatment was always performed at a higher strain than the maximum strain encountered by the sensor in use. In order to characterize the optical properties of the fiber, we quantified its propagation loss by successively shortening the fiber and measuring its normalized light intensity. In the wavelength range of 530~685 nm, the normalized intensity increased with the decrease of fiber length (
Figure 3d).
After evaluating the mechanical and optical properties of the fiber separately, we discussed in detail the wavelength-dependent optical response of the fiber to disturbances caused by repeated stretching, bending, and torsion. For the purpose of quantifying the effect of stretching-on-optical-transmission characteristics of the fiber, the fiber was cyclically stretched for 50 times at 20 °C, 30 °C and 50 °C within the strain range of 0% to 50%. And the normalized spectra of the fiber after each cycle were measured (
Figure 3e–g). The cycling process at 20 °C is shown in
Figure 3e. The normalized light intensity in the fiber decreased from 1.00 to 0.98 after the first cycle due to the Mullins effect. However, during the second to 50th cycles, the normalized intensity in the fiber was distributed between 0.93 and 0.98. In other words, the normalized intensity was lost by up to 5%.
Figure 3e shows the cycling process at 30 °C. Similarly, after the first cycle, the normalized light intensity in the fiber dropped from 1.00 to about 0.97. In comparison, in the remaining 49 cycles, the normalized intensity in the fiber was between 0.90 and 0.97, meaning that the normalized intensity lost up to 7%.
Figure 3g shows the cycling process at 50 °C, which is similar to the cycle at the above two temperatures. After the first cycle, the normalized light intensity in the fiber decreased from 1.00 to about 0.96. But during the second to 50th cycles, the normalized intensity in the fiber was distributed between 0.87 and 0.96, and the normalized intensity lost up to 9%. By comparison (
Figure 3e–g), it can be found that the light loss gradually increases with the rise of temperature after the cycle. However, when the ambient temperature is below 50 °C, the loss of normalized light intensity is less than 10%. The above results have demonstrated flexibly that the fiber can maintain high stability when operating below 50 °C.
In addition, the strain-normalized light intensity curves of the fiber at the wavelength of 650 nm during the first and 50th cycles at room temperature were measured, as shown in
Figure 3h. By comparing the normalized light intensity corresponding to each strain during the two cycles, the light loss caused by stretching strain is only about 5% after 50 cycles of stretching. Fibers exhibit a reduction in normalized light intensity as they elongate, due to wavelength dependence. This can be reversible and repeatable for at least 50 cycles. The inset in
Figure 3h shows that the light transmitted in the fiber decreases with the increase of the fiber length due to the longer path of the light. This effect is also observed in other stretchable fibers. While tensile strain occurs, the optical signal in the flexible fiber will change obviously. This can satisfy the requirements of deformation sensor.
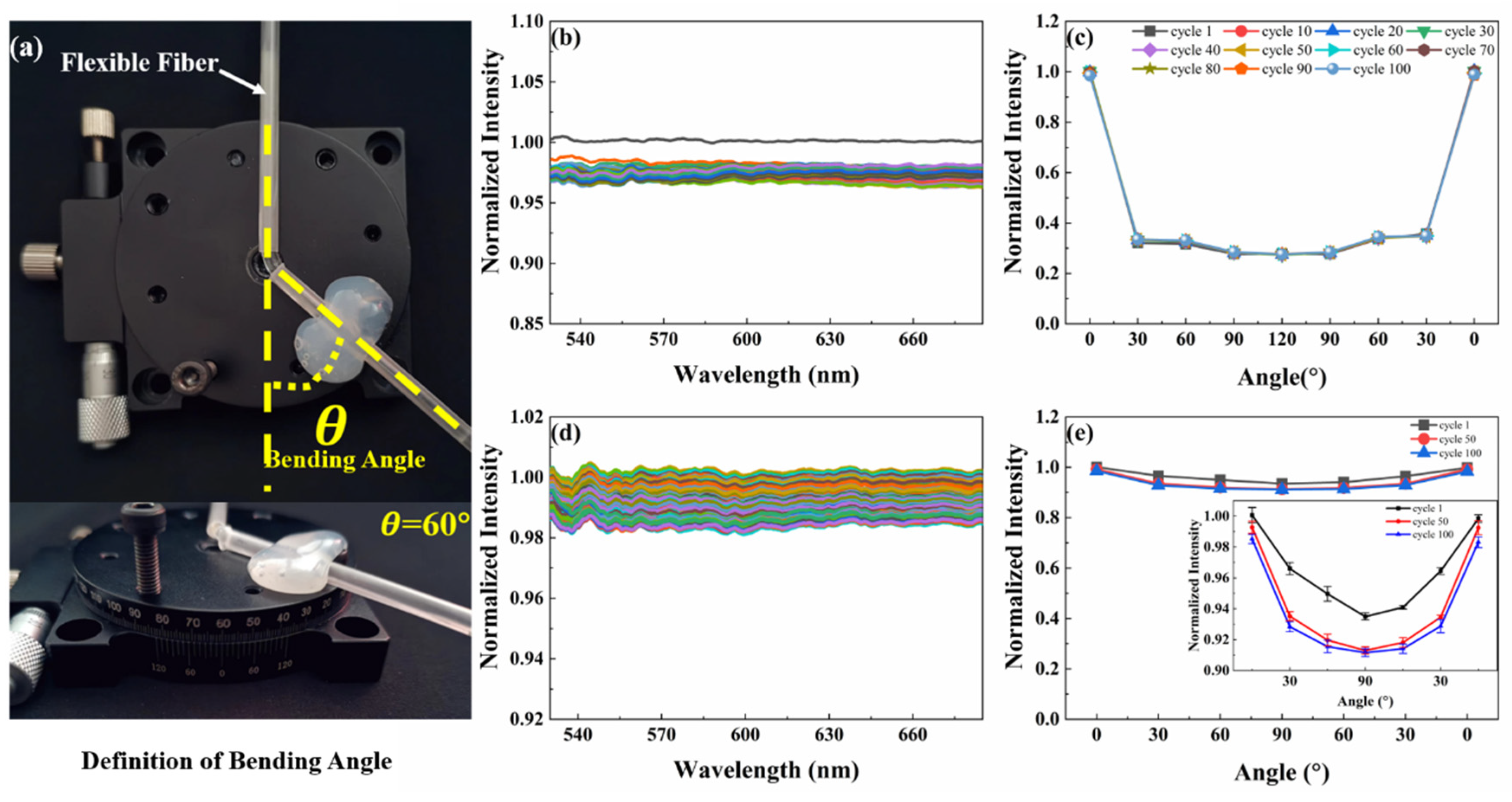
The fiber is also repeatedly affected by bending and torsion. These two additional stimuli are important in sensing applications. For the bending response evaluation, the bending angle
θ is defined as shown in
Figure 4a. The fiber was bent from 0° to 120° and then back to 0° as one of 100 cycles. Normalized spectra of the fiber were measured after each cycle (
Figure 4b). Similar to the tensile experiment, the normalized light intensity decreased from 1.00 to 0.98 after the first cycle in the cyclic bending process. Nevertheless, the normalized light intensity in the fiber was distributed between 0.96 and 0.98 during the second cycle to the 100th cycle, namely, the loss is about 2%. In the torsion test, the optical fiber was twisted from 0° to 90° and then restored to 0°, as one of 100 cycles. And the normalized spectrum of the optical fiber after each cycle was measured (
Figure 4d). There was no phenomenon similar to the Mullins effect during the torsional cycles. After 100 torsional cycles, the normalized light intensity in the fiber was distributed between 0.98 and 1.00, meaning that the loss of normalized light intensity is lower than 2%. The transmission loss observed in the above experiments is due to the fact that the light propagating in the fiber cannot satisfy the critical angle requirement of total internal reflection.
In the bending test, the angle-normalized intensity curves at 10 intervals during the 10th to 100th cycles and the 1st cycle were measured (
Figure 4c). The curves of the 11 cycles basically coincide. In addition, the optical signal varies with the bending angle in the bending process, which satisfied the requirements of the deformation sensor. Similar to the bending experiment, the angle-normalized intensity curves during the 1st, 50th and 100th cycles in the torsion test were obtained as shown in
Figure 4e. The light intensity difference at each torsion angle is tiny during the three cycles. The inset in
Figure 4e shows that while the torsion angle is increased to 90°, the optical signal in the fiber will change. In fact, when the sensor is deformed, the torsion angle of the fiber is not more than 30°. So, the loss caused by the torsion will not have a significant impact on the measurement of the optical signal.
In conclusion, the change of ambient temperature and the deformation of stretching, bending and torsion will lead to certain optical transmission losses. When the temperature is below 50 °C, the loss caused by tensile deformation is little and the optical fiber can maintain its sensing performance well. In addition, the flexible fiber also shows high optical transmission stability after bending and torsional deformation. These tests indicate that our optical fiber can not only maintain high stability after deformation, but also that the optical signal in the optical fiber varies with shape variables during deformation, so as to satisfy the requirements of the deformation sensor suitable for data gloves.
3.2. Data Collection and Processing
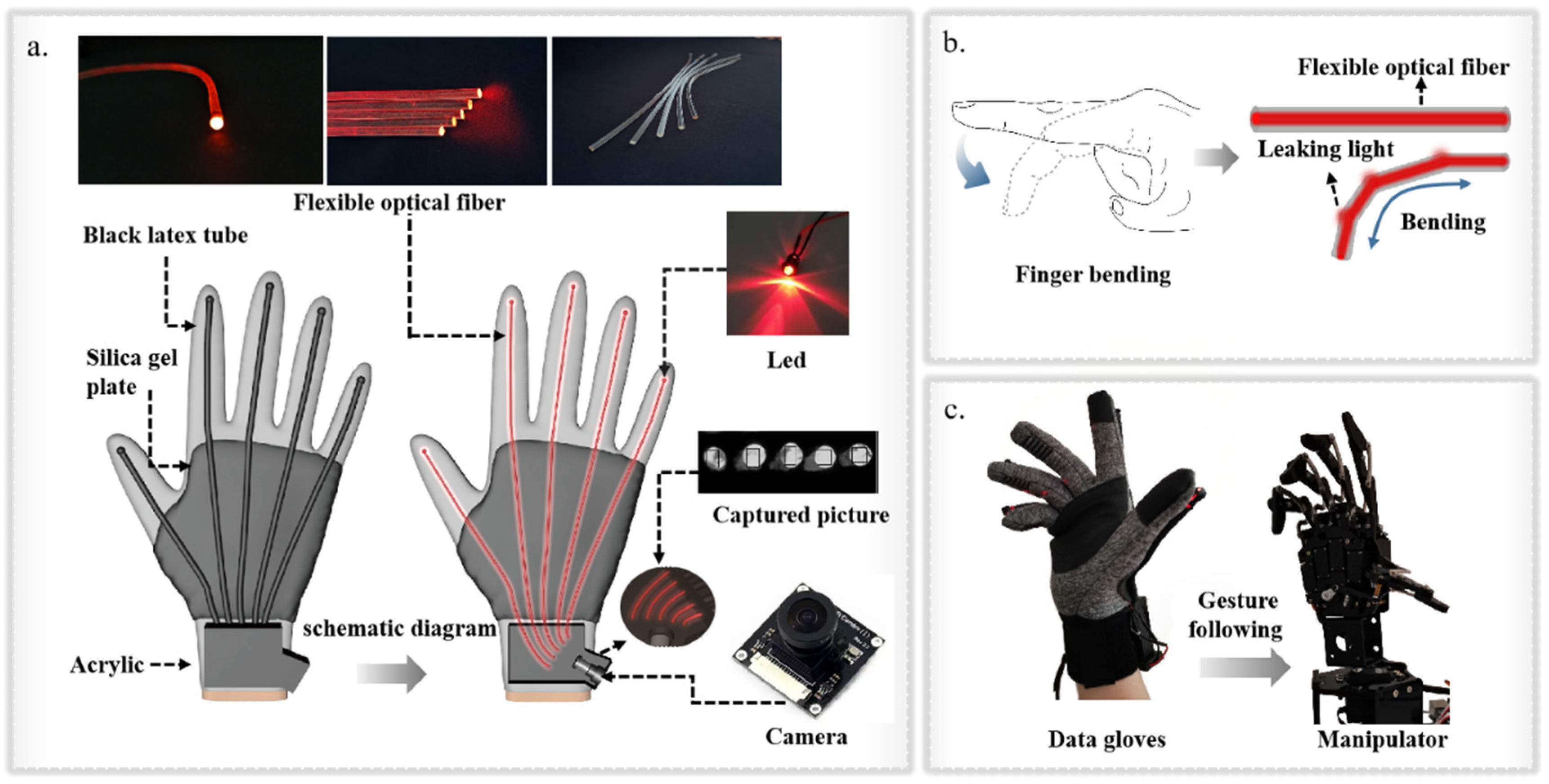
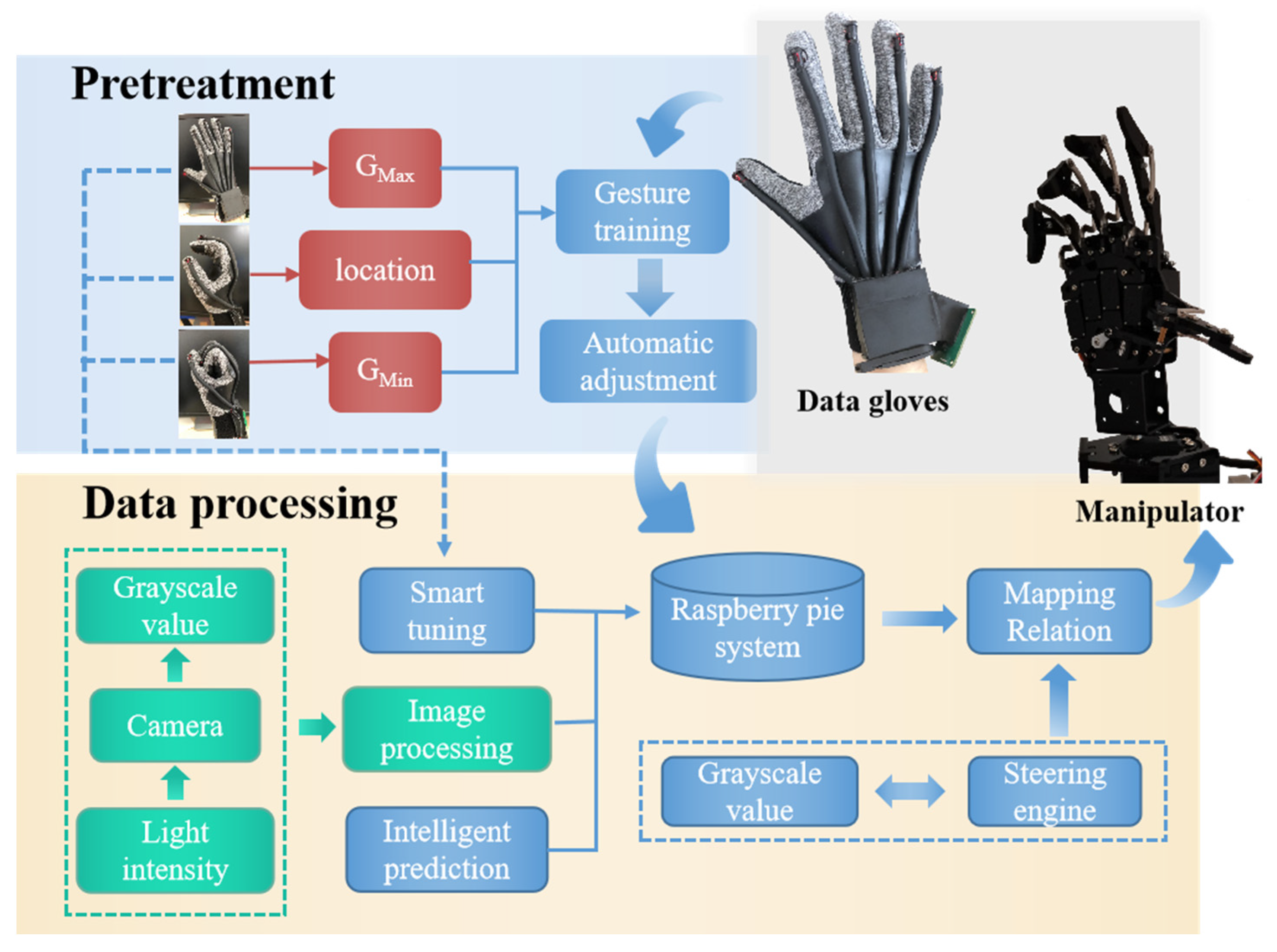
Based on the design of the data glove and the data acquisition method, a manipulator control platform associated with the data glove was built. Here, a Raspberry Pi (RPi) manipulator with 6 degrees of freedom was used. In the RPi environment, Python was used to process the gray value information transmitted by data gloves. And the processing results could be transmitted to the manipulator in real-time to realize real-time gesture capture. As shown in
Figure 5, the data collection and processing process includes pretreatment—automatic calibration and data processing.
3.2.1. Pretreatment—Automatic Calibration
In the process of using data gloves, the initial states may be inconsistent each time the gloves are worn. In addition, the hand shape of each person and the initial value of the light source may be different. Therefore, when using data gloves, it is necessary to adjust the sensor’s zero position and amplitude. In the adjustment process, the user makes a specific gesture in advance and gets a value matching the user’s hand, so as to ensure the performance stability of the data glove.
After calibration, the gray values of the maximum and minimum bending and stretching of each finger at the limit position and the gray values in the semi-grip state can be collected. The gray value at the maximum and minimum bending limits can be determined to the change range of the gray value. The gray value in the semi-grip state corresponds to the location point of the manipulator, so as to obtain a gentler mapping relation (steering gear value and gray value), which is the basis for data processing. As a consequence, combined with the self-calibration function that can improve the accuracy of data acquisition, the data glove can be self-adaptive according to different hand sizes and bending habits. This enables a “user-friendly” data glove to be customized to the user’s needs.
3.2.2. Data Processing
During data acquisition and processing of the data glove, the real-time performance and accuracy of the control system are the key factors to measure system performance. In the process of gesture-following, the system needs to respond in time and accurately transmit data to the manipulator, so a reasonable and efficient algorithm is particularly important.
The data processing system can be divided into two parts, including pretreatment and data processing modules. The mapping relation between the gray value and a specific gesture can be transmitted to the system for automatic calibration. Then, a new mapping relation is constructed by associating the pre-processing mapping relation with the steering gear value of the manipulator. After pretreatment, the data glove outputs five gray values (corresponding to five fingers) in real-time. And the gray values are transferred to the manipulator through the mapping relation in the system, so that gesture-following can be realized. That is, every time the user of the data glove makes a hand action, the manipulator will make the corresponding action in real-time. In the process of glove use, three fine-tunings of mapping relations were set, in order to prevent the deviation of mapping relations caused by the inaccuracy of maximum and minimum limit gray values and amplitude obtained in the pre-processing stage; this avoids impacting on the user experience of the data gloves.
Since the hand has muscle, skin and other soft tissue, a finger’s action may affect the operation of the adjacent sensor without action, resulting in the manipulator making the wrong action. In view of this phenomenon, we tested gesture capture several times and found that it followed a pattern. For example, when the middle finger is bent, the corresponding sensor will respond even if the ring finger and index finger do not move. Because such error fluctuations can be “predicted” in advance of testing, intelligent prediction was built into the software to correct them. After a large number of tests and data analysis, various similar patterns were collected to form an action–correlation–prediction library. Compensation function relations can be obtained according to these error patterns to alleviate the misjudgment of fluctuation.
During data processing, the real-time data response is extremely important in the whole system, so as not to affect the real-time gesture tracking and the user experience of the gloves. In this work, the real-time data response mainly depended on the frame rate of the gray value from the flexible fiber cross-section collected by the camera. The 8-megapixel camera with a dynamic frame rate of 25 fps~30 fps can collect data 18 times per second and contain 90 data points, which is enough to provide a good user experience.
3.3. Dynamic Demonstration of Gesture Capture
In order to accurately analyze the quantitative process of finger bending and intuitively observe the process of gesture capture, six gestures (number 1, number 2, number 3, number 4, as well as the gradual bending of the index finger and the unfolding–clenching–relaxing of the whole palm) were captured based on the data glove’s associated manipulator control system and structure of the manipulator.
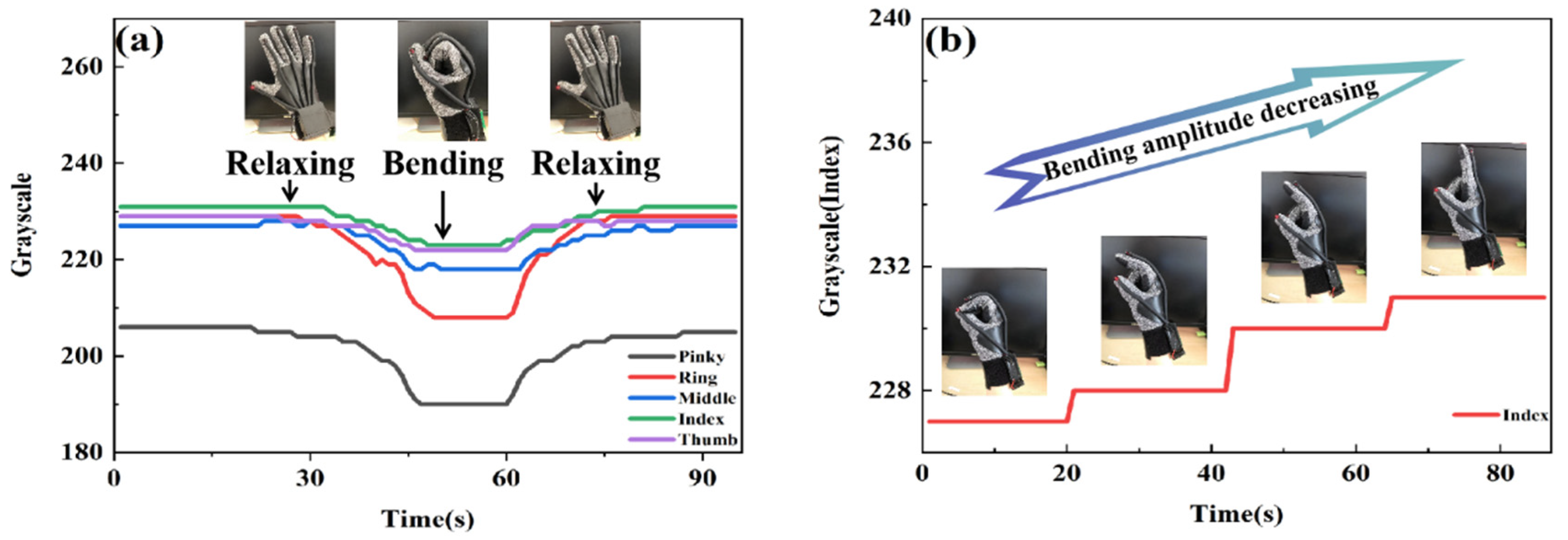
Figure 6a shows the change in the gray value with the process of the whole-palm-closing action (three continuous states of relaxing–bending–relaxing). It can be seen that the gray values of the five fingers have corresponding changes in the process of the palm from the stretch state to the clenched state. The palm returned to the stretch state; the gray value also recovered at the same time. When the palm is fully expanded, the flexible fiber is in a completely relaxed state without any bending or stretching pressure. So, the brightness of the fiber section is the strongest and the gray value is also the greatest. As the finger bends, the flexible fiber is subjected to both tension and pressure from the knuckle bending inside the black latex tube. The optical fiber deformation causes radiation loss, leading to a reduction in the brightness of the flexible fiber cross-section, and the gray value will also decrease synchronously. When the full palm is clenched, the flexible fiber is stretched and bent to the utmost. At this point, the brightness of the fiber cross-section is at its darkest, and the gray value drops to the base level. After a cycle, the gray value returns to the initial value. In order to evaluate the performance of the flexible fiber sensor more carefully, the index finger was chosen as the representative, its bending process was slowed down, and it was kept for a short time in four obviously different bending states. As shown in
Figure 6b, the gray values of fingers in these four bending states have obvious changes. In the process of gradually moving from the finger bending state to the stretching state, with the decrease of the bending angle, the pressure on the flexible fiber decreased, and the gray value increased. In addition, without interference from other fingers, the gray value of the stay state remained unchanged.
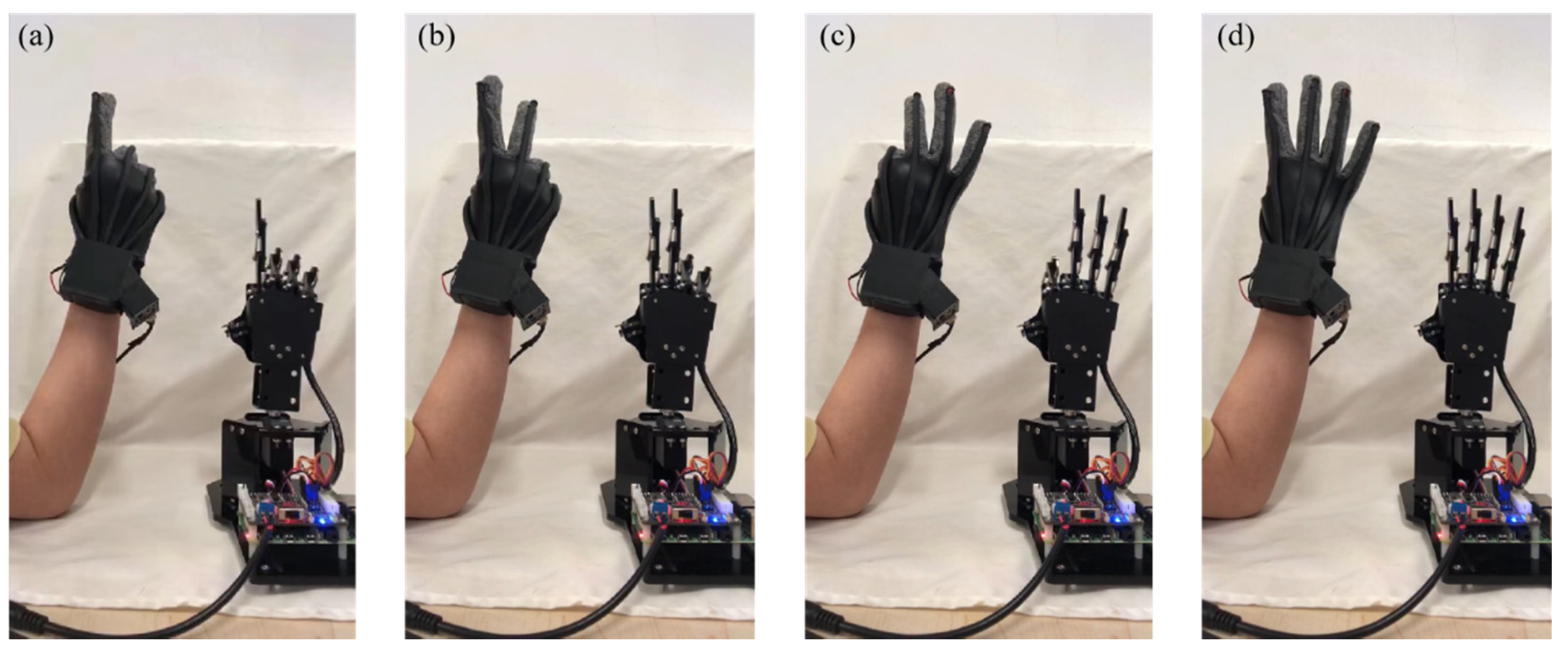
Figure 7a shows the change in the gray value caused by repeatedly making the gesture of number 1 in the expanded state. When the number 1 gesture is made, the gray values of other fingers except the index finger (green curve) change significantly. And the gray values decrease as the fingers bend. (
Figure 7b–d), respectively, show the changes of gray values generated by the gestures of numbers 2, 3 and 4 repeatedly from the expanded state. Some similar phenomena can be seen in these three pictures. For example, in
Figure 7c, the thumb and index finger are bent when doing number 3. When these two fingers are bending, the curves of the other fingers fluctuate as well, rather than being a straight line as expected. This is due to the physiological structure of the hand. Knuckle movement is not independent. The fingers are linked when making different gestures. However, the correlation fluctuation is not sharp enough to affect the use of the data glove. This experimental result proves that the flexible optical fiber can quantify the finger movement according to changes in the gray value. Obviously, the data glove can quickly recognize and accurately capture gestures by dint of reliable and stable sensing performance.
To evaluate the timeliness and repeatability of the data glove, it was used to perform several consecutive sets of movements. As shown in
Video S1 from the Supplementary Materials, the data glove went from the bending of one finger to the gradual display of numbers 1, 2, 3, 4, 5, and then back to numbers 4, 3, 2, 1, to the full grip of the hand. The video screenshots of linkage between data glove and manipulator are shown in
Figure 8. The continuous movements of each finger are tracked in real-time by the manipulator, indicating that our data glove can accurately recognize each gesture and respond quickly in the dynamic process, and then guide the manipulator to make the corresponding actions, thus realizing the rapid human–robot interaction. The time delay of the data glove was measured, and the time from the initiation of the action of the data glove to the completion of the following action of the manipulator was about 0.5 s. The time delay can be further reduced by increasing the acquisition frequency of the optical signal to capture a larger number of points. Consequently, the data glove can fully satisfy real-time interactions with a manipulator or VR. There is every reason to expect the data glove to have a great future in artificial intelligence.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







