
Comparison between an RSSI- and an MCPD-Based BLE Indoor Localization System †

Abstract
:1. Introduction
- lower energy consumption for the data transmission between IoT devices and remote processing;
- longer battery lifetime;
- significantly shorter latency compared to remote computation;
- user comfort;
- security and privacy improvements, as the data are processed locally [27].
- On the software side, the paper compares the performance of wkNN for the two different ranging methods based on BLE: One being based on MCPD, the other on RSSI.
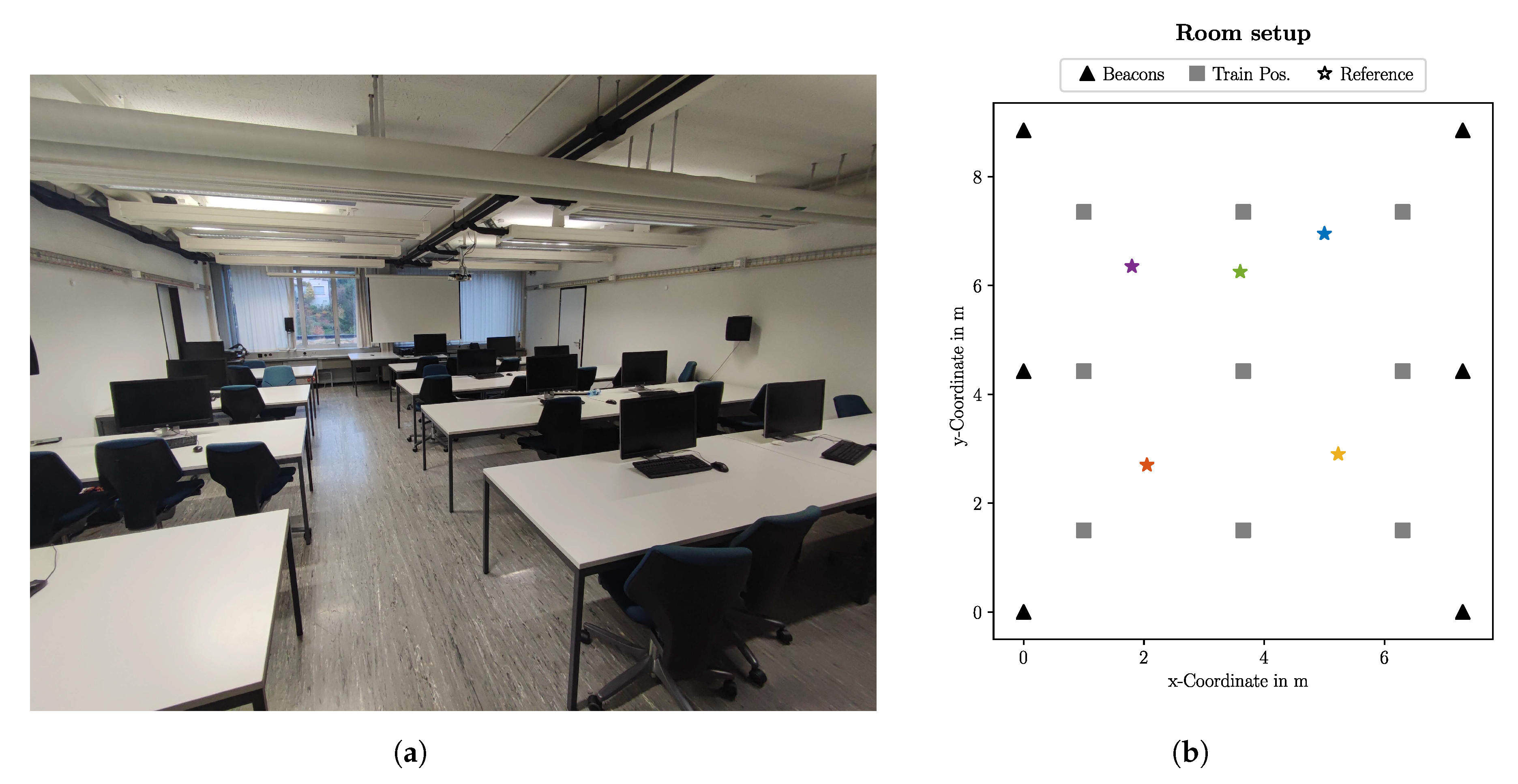
- The design of the anchors and the mobile nodes are presented and evaluated with experimental results showing an overall accuracy of the implemented algorithm below 1 m using MCPD and below 2 m using RSSI on average for a 7.3 m × 8.9 m room.
2. Background on BLE-Based Localization
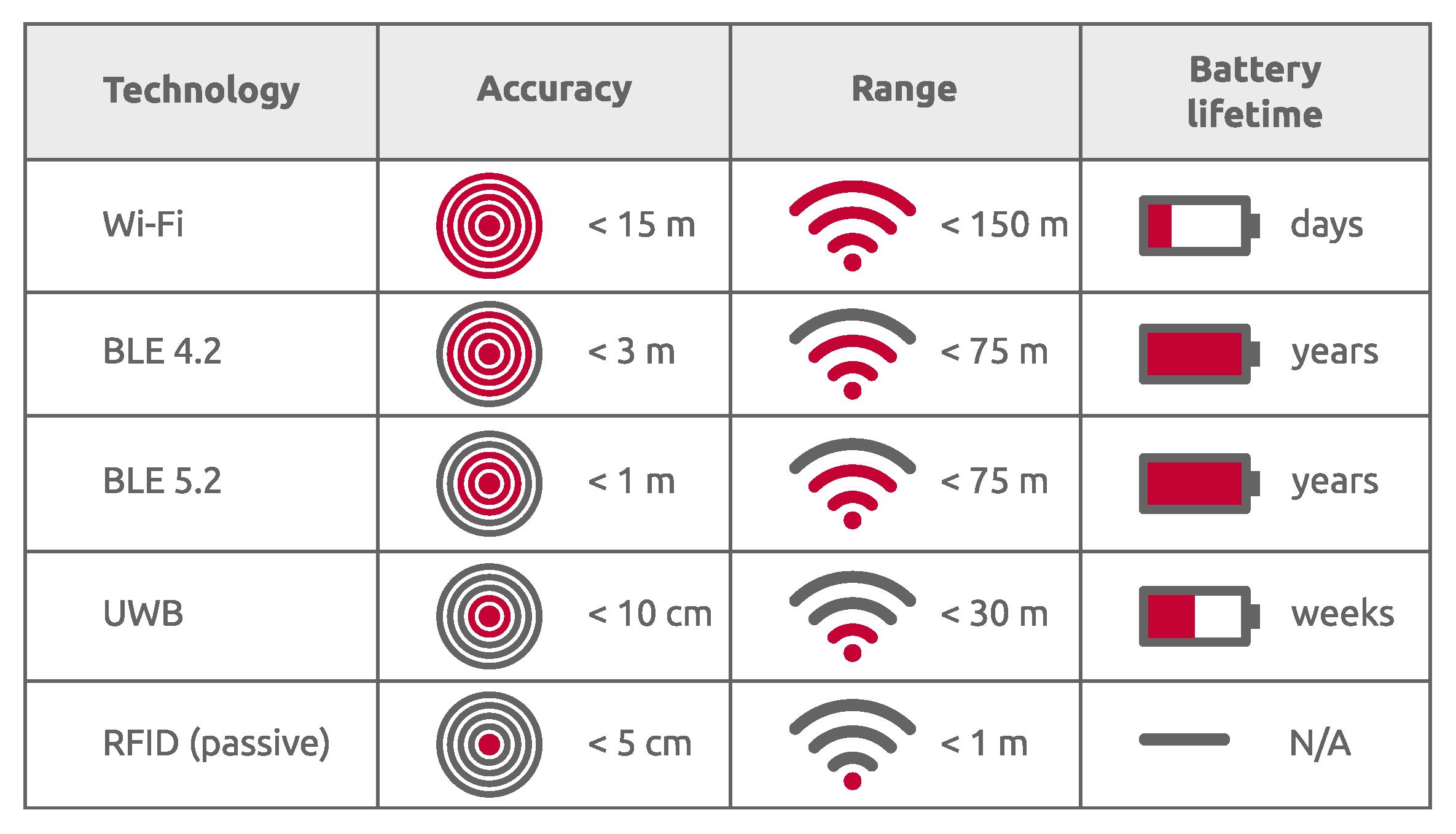
2.1. Ranging Technologies
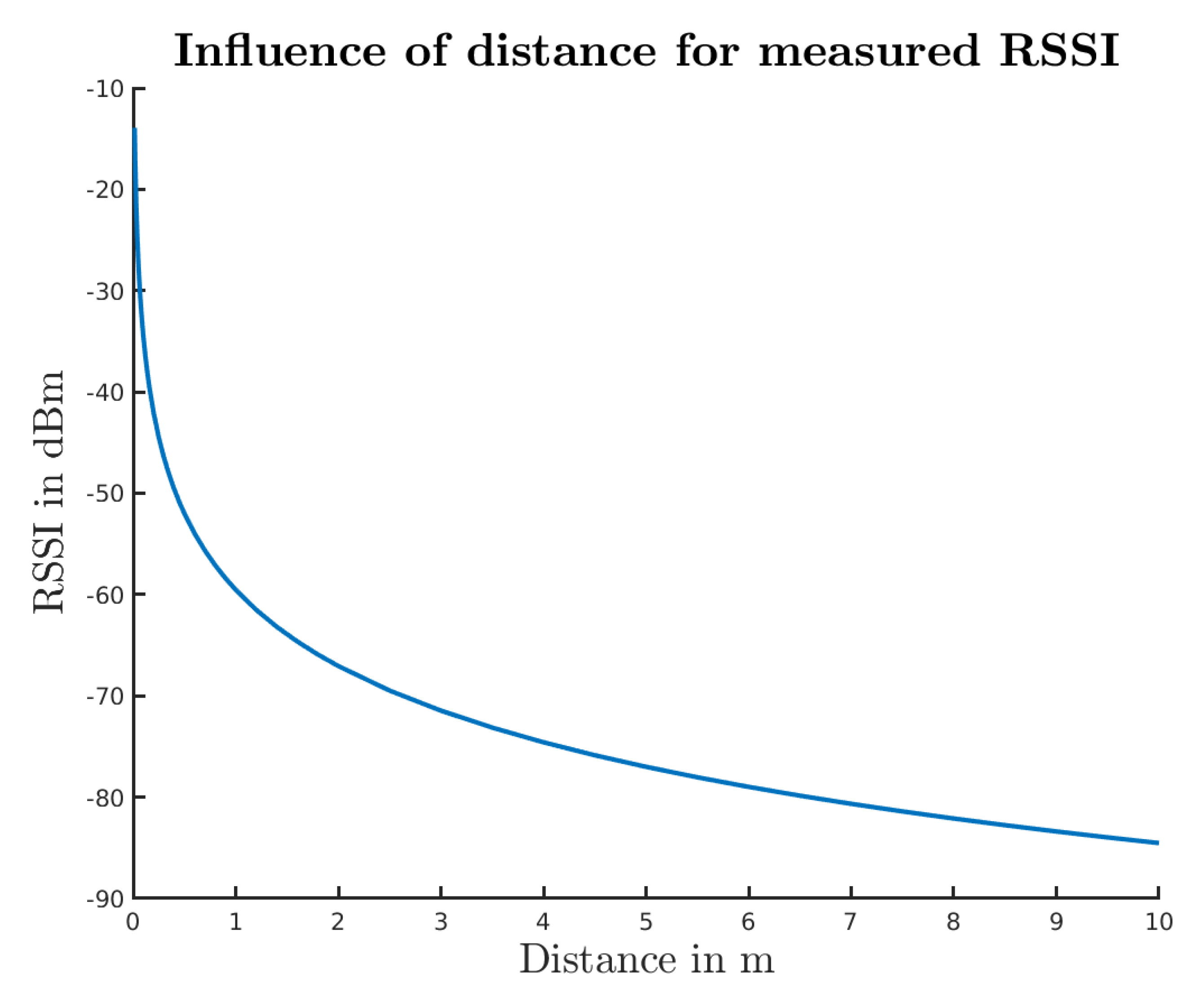
2.1.1. RSSI-Based Ranging
2.1.2. MCPD-Based Ranging
2.2. Localization Algorithms
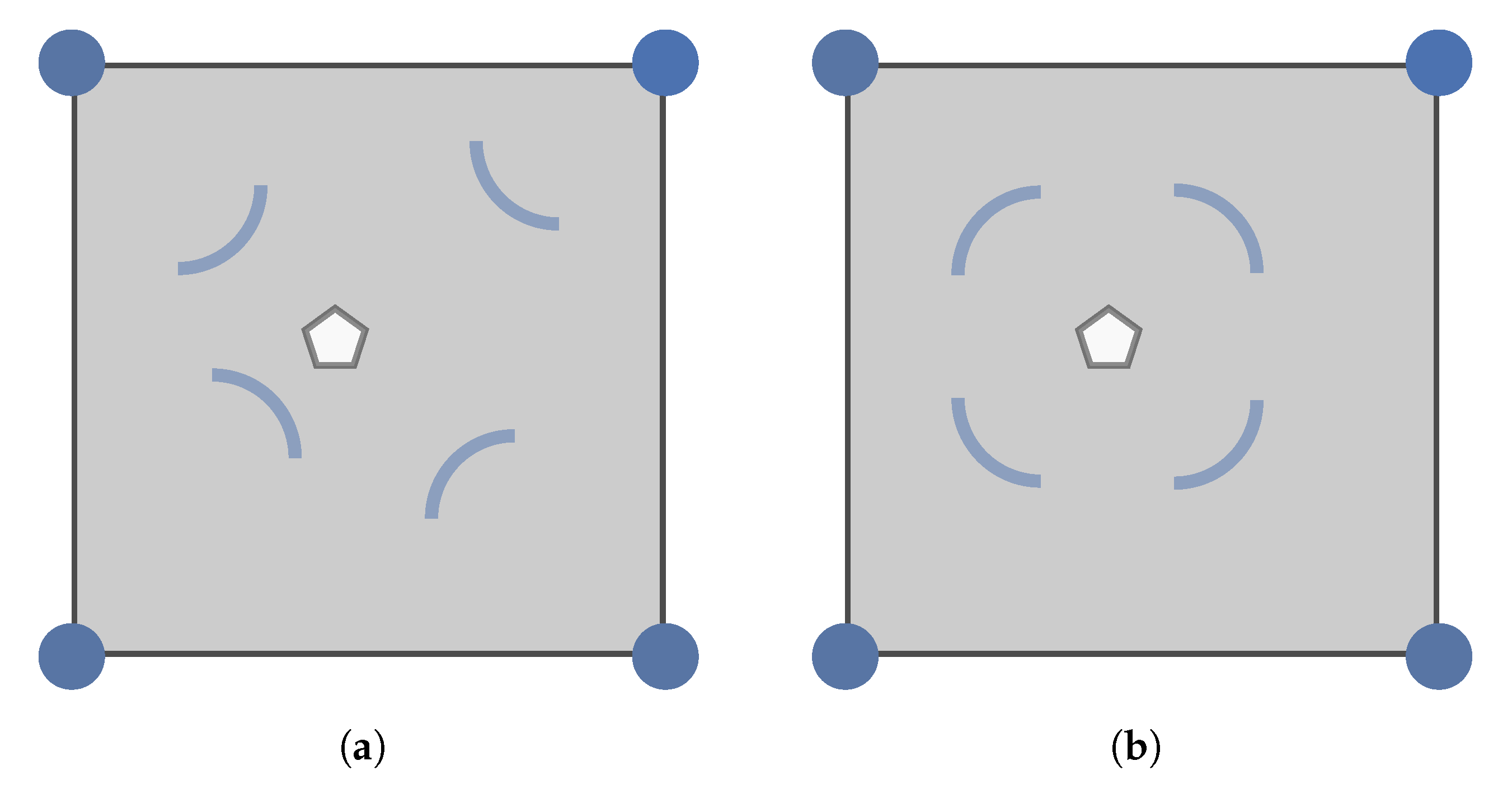
2.2.1. Trilateration
2.2.2. Weighted k-Nearest Neighbors Indoor Localization Algorithm
| Algorithm 1 wkNN-based localization. |
function wkNN() ▹S: list of training positions i [] ▹m: measurement vector for do ▹k: # closest neighbors to select ) end for SortAscending(d) GetKClosestNeighbors(d,k) [] for do end for end function |
3. Materials and Methods
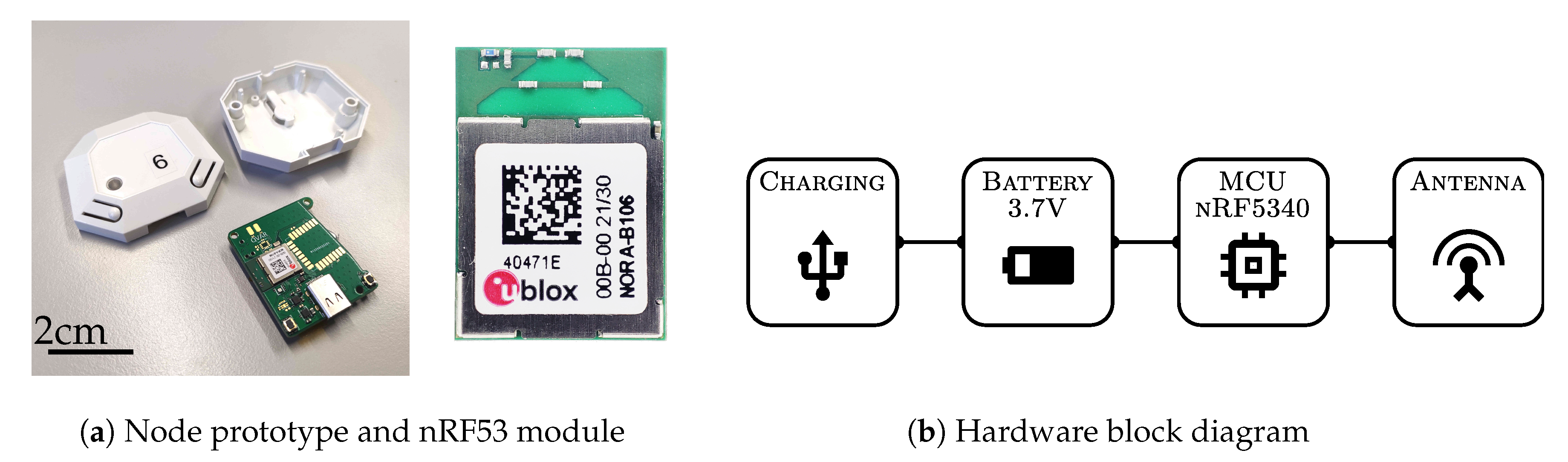
3.1. System Architecture
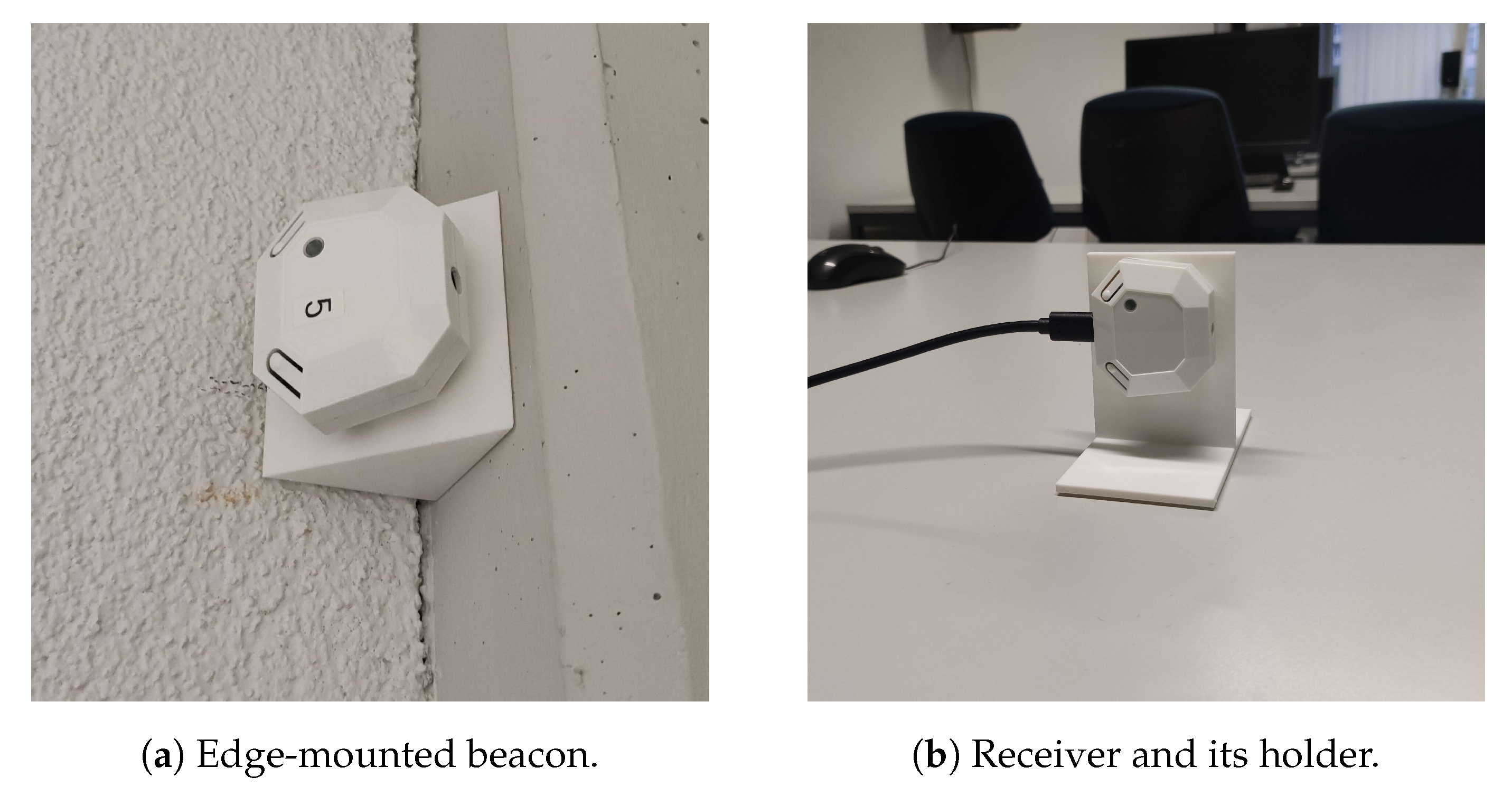
Beacon and Receiver Nodes
3.2. Experimental Setup
4. Results
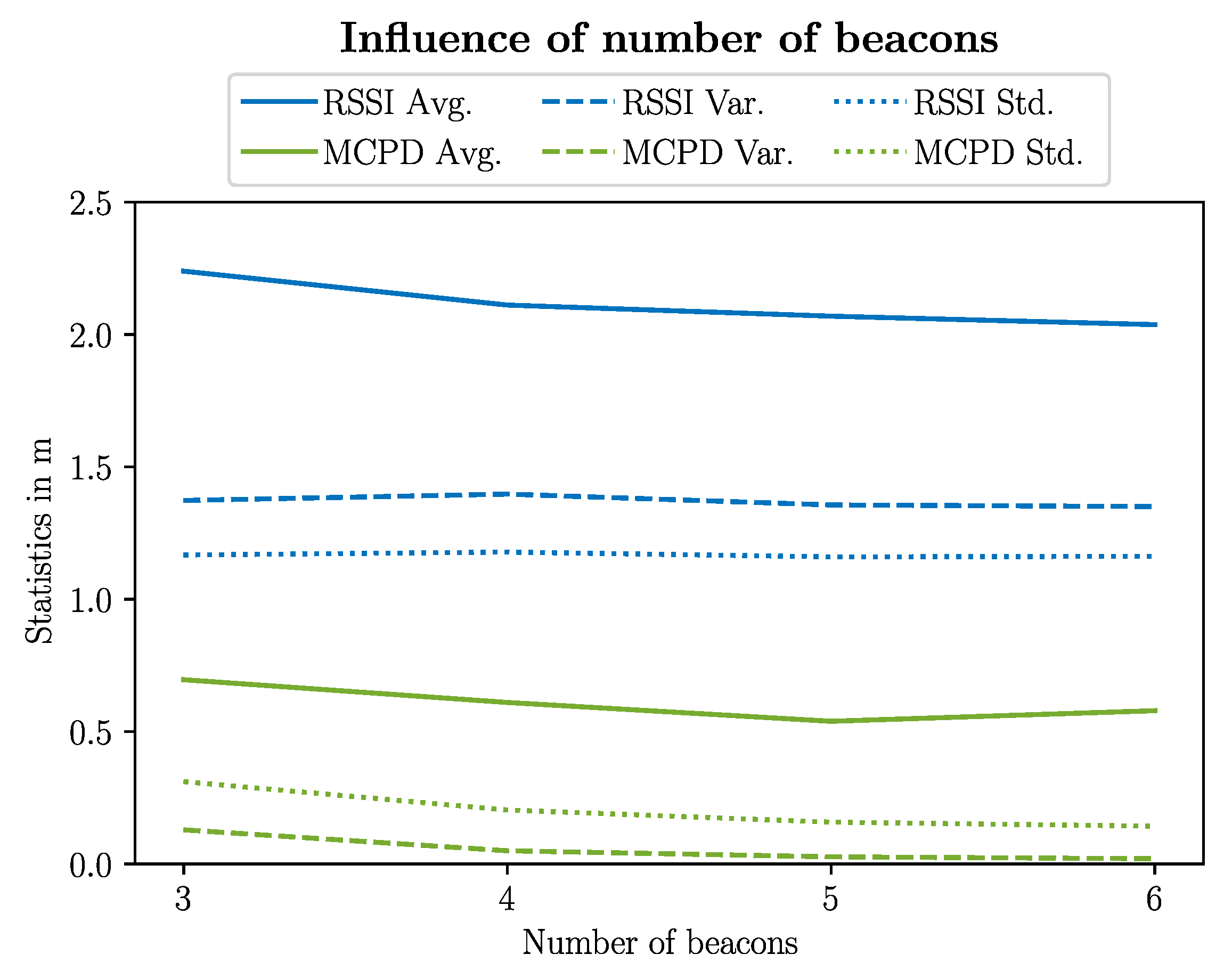
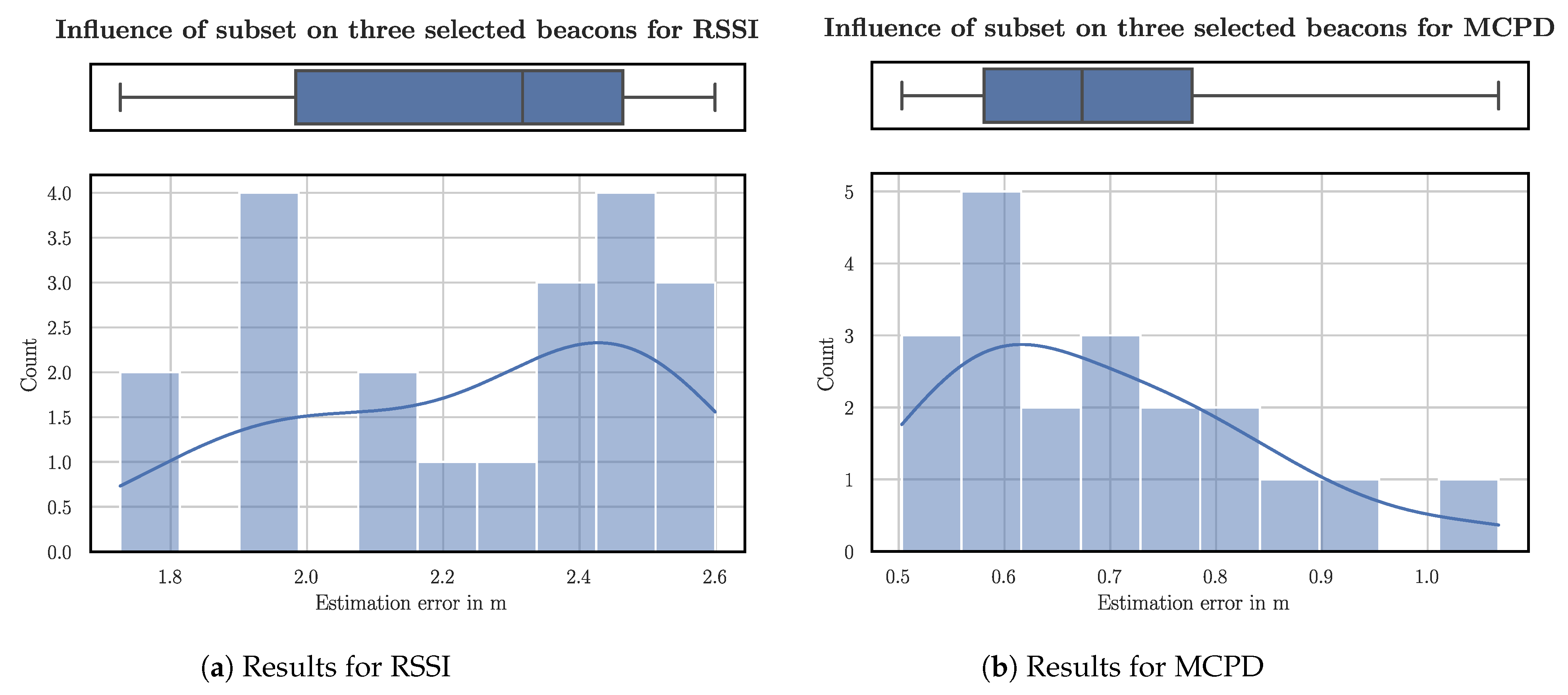
4.1. Influence of the Number of Beacons for the Localization Accuracy
4.2. Results When First Averaging 15 Measurements before Estimation, Using 6 Beacons
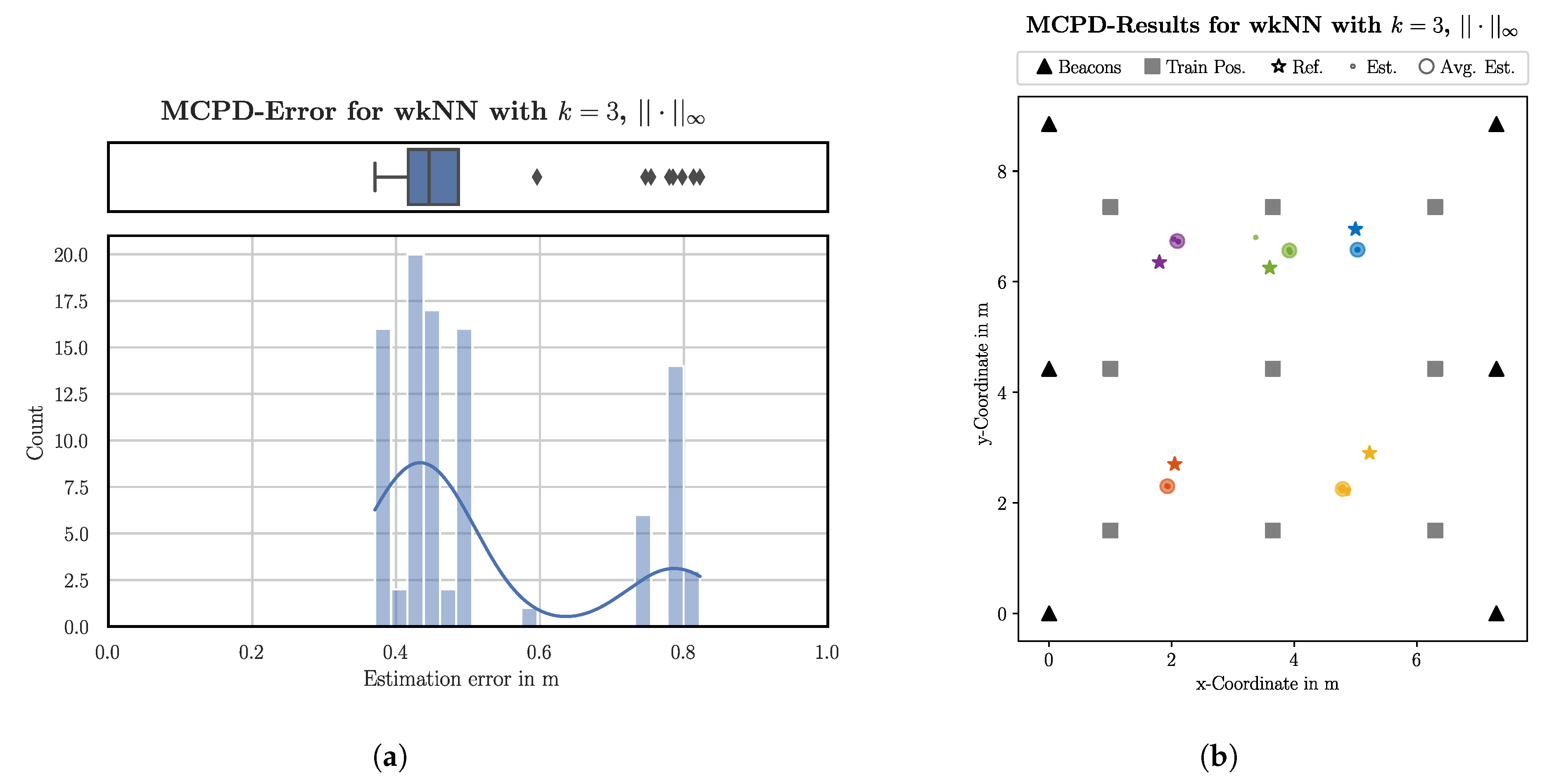
4.3. Results for MCPD Using and the Chebyshev Norm
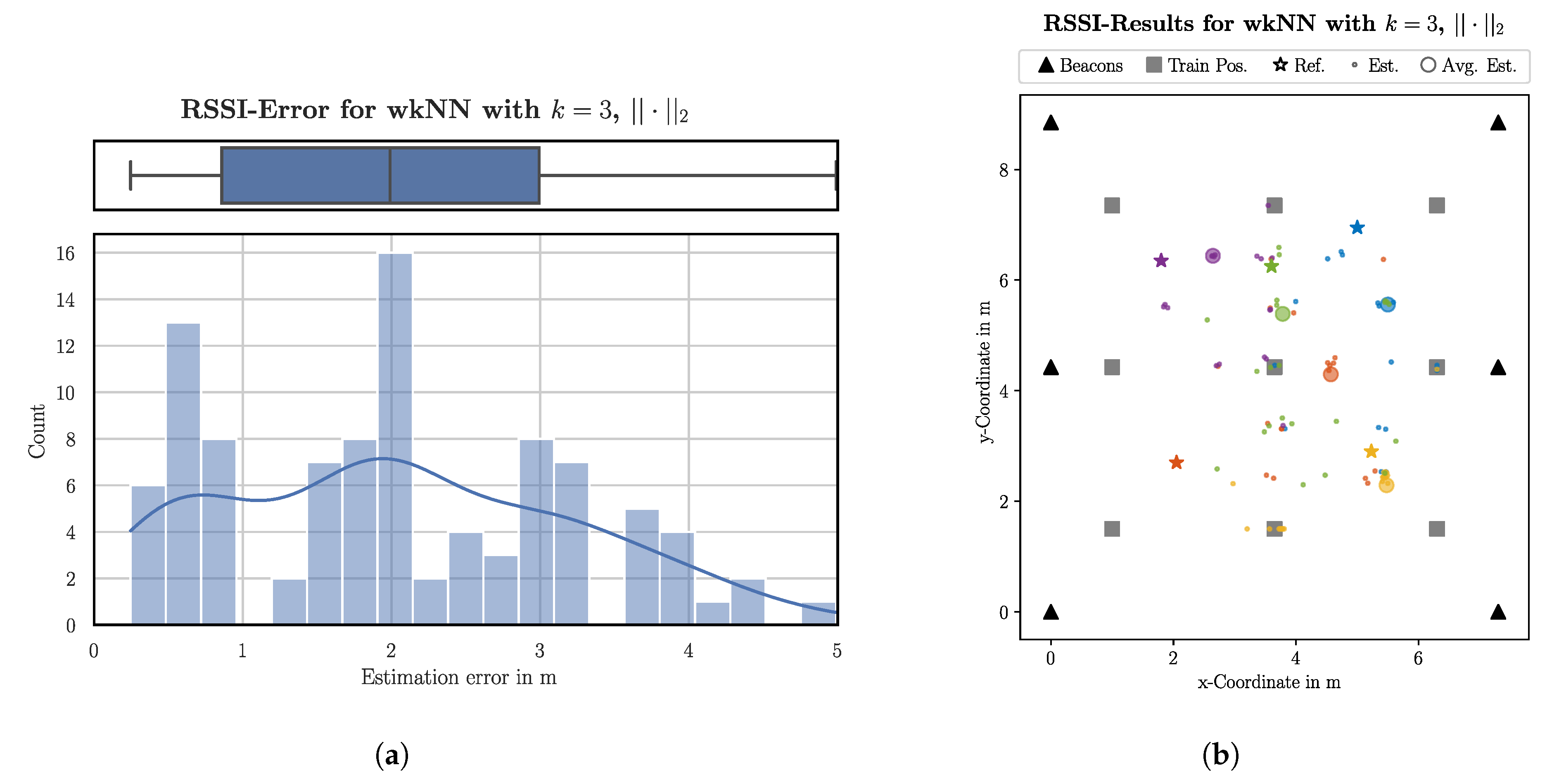
4.4. Results for RSSI Using and the Euclidian Norm
4.5. Discussion
- In the original paper, the validation is performed at the same position as the training; the estimation error there can, therefore, be attributed to the variance of the RSSI measurement and not the performance of the algorithm (and linearity between the position) itself.
- Here only 15 measurements have been used to perform the estimation, whereas, in the original paper, 1000 measurements were used.
- A different node design, with a different SoC and antenna design, has been used.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | three-dimensional |
| AoA | angle of arrival |
| BLE | Bluetooth Low Energy |
| CNN | convolutional neural network |
| CPU | central processing unit |
| GPS | Global Positioning System |
| GPU | graphics processing unit |
| IFFT | Inverse Fast Fourier Transform |
| IPS | Indoor Positioning System |
| IQ | in-phase and quadrature |
| IoT | internet of things |
| LiPo | lithium polymer |
| LoRa | Long Range |
| MCPD | multi-carrier phase difference |
| MCU | microcontroller unit |
| PCB | Printed Circuit Board |
| RFID | radio-frequency identification |
| RSSI | received signal strength indicator |
| SoC | system on a chip |
| USB | Universal Serial Bus |
| UWB | Ultra-Wideband |
| WLAN | Wireless Local Area Network |
| kNN | k-Nearest Neighbors |
| wkNN | weighted kNN |
References
- Haute, T.V.; Poorter, E.D.; Crombez, P.; Lemic, F.; Handziski, V.; Wirström, N.; Wolisz, A.; Voigt, T.; Moerman, I. Performance Analysis of Multiple Indoor Positioning Systems in a Healthcare Environment. Int. J. Health Geogr. 2016, 15, 7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boulos, M.N.K.; Berry, G. Real-Time Locating Systems (RTLS) in Healthcare: A Condensed Primer. Int. J. Health Geogr. 2012, 11, 25. [Google Scholar] [CrossRef] [Green Version]
- Chabbar, H.; Chami, M. Indoor localization using Wi-Fi method based on Fingerprinting Technique. In Proceedings of the 2017 International Conference on Wireless Technologies, Embedded and Intelligent Systems (WITS), Fez, Morocco, 19–20 April 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Furfari, F.; Crivello, A.; Baronti, P.; Barsocchi, P.; Girolami, M.; Palumbo, F.; Quezada-Gaibor, D.; Silva, G.M.M.; Torres-Sospedra, J. Discovering Location Based Services: A Unified Approach for Heterogeneous Indoor Localization Systems. Internet Things 2021, 13, 100334. [Google Scholar] [CrossRef]
- Kim, Y.A.; Lee, H.; Lee, K. Contamination of the Hospital Environmental By Pathogenic Bacteria and Infection Control. Korean J. Nosocom. Infect. Control 2015, 20, 1. [Google Scholar] [CrossRef] [Green Version]
- Macagnano, D.; Destino, G.; Abreu, G. Indoor positioning: A key enabling technology for IoT applications. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Republic of Korea, 6–8 March 2014; pp. 117–118. [Google Scholar] [CrossRef]
- Jelicic, V.; Magno, M.; Brunelli, D.; Bilas, V.; Benini, L. An energy efficient multimodal Wireless Video Sensor Network with eZ430-RF2500 modules. In Proceedings of the 5th International Conference on Pervasive Computing and Applications, Maribor, Slovenia, 10–13 May 2010; pp. 161–166. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Jain, R. Survey of Wireless Based Indoor Localization Technologies; Washington University in St. Louis: St. Louis, MO, USA, 2014. [Google Scholar]
- Magno, M.; Rickli, S.; Quack, J.; Brunecker, O.; Benini, L. Poster Abstract: Combining LoRa and RTK to Achieve a High Precision Self-Sustaining Geo-Localization System. In Proceedings of the 2018 17th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Porto, Portugal, 11–13 April 2018; pp. 160–161. [Google Scholar] [CrossRef]
- Fonseka, P.; Sandrasegaran, K. Indoor localization for IoT applications using fingerprinting. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 736–741. [Google Scholar] [CrossRef]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A Survey on Wireless Indoor Localization From the Device Perspective. ACM Comput. Surv. 2016, 49, 1–31. [Google Scholar] [CrossRef] [Green Version]
- Tian, X.; Li, W.; Yang, Y.; Zhang, Z.; Wang, X. Optimization of Fingerprints Reporting Strategy for Wlan Indoor Localization. IEEE Trans. Mob. Comput. 2018, 17, 390–403. [Google Scholar] [CrossRef]
- Flueratoru, L.; Wehrli, S.; Magno, M.; Lohan, E.S.; Niculescu, D. High-Accuracy Ranging and Localization with Ultra-Wideband Communications for Energy-Constrained Devices. IEEE Internet Things J. 2021, 9, 7463–7480. [Google Scholar] [CrossRef]
- Polonelli, T.; Schläpfer, S.; Magno, M. Performance Comparison between Decawave DW1000 and DW3000 in low-power double side ranging applications. In Proceedings of the 2022 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 1–3 August 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on Aoa and Pdoa Using Virtual Stations in Multipath and Nlos Environments for Passive Uhf Rfid. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Cortesi, S.; Dreher, M.; Magno, M. Design and Implementation of an RSSI-Based Bluetooth Low Energy Indoor Localization System. In Proceedings of the 2021 17th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Bologna, Italy, 11–13 October 2021; pp. 163–168. [Google Scholar] [CrossRef]
- Lam, K.H.; Cheung, C.C.; Lee, W.C. Rssi-Based Lora Localization Systems for Large-Scale Indoor and Outdoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 11778–11791. [Google Scholar] [CrossRef]
- Mayer, P.; Magno, M.; Berger, A.; Benini, L. Rtk-Lora: High-Precision, Long-Range and Energy-Efficient Localization for Mobile Iot Devices. IEEE Trans. Instrum. Meas. 2020, 70, 1–11. [Google Scholar] [CrossRef]
- Wu, H.; Tao, B.; Gong, Z.; Yin, Z.; Ding, H. A Fast UHF RFID Localization Method Using Unwrapped Phase-Position Model. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1698–1707. [Google Scholar] [CrossRef]
- Kirschenbaum, I.; Wool, A. How to Build a Low-Cost, Extended-Range RFID Skimmer. In Proceedings of the USENIX Security Symposium, Vancouver, BC, Canada, 31 July–4 August 2006; Volume 4. [Google Scholar]
- Mayer, P.; Magno, M.; Brunner, T.; Benini, L. LoRa vs. LoRa: In-Field Evaluation and Comparison For Long-Lifetime Sensor Nodes. In Proceedings of the 2019 IEEE 8th International Workshop on Advances in Sensors and Interfaces (IWASI), Otranto, Italy, 13–14 June 2019; pp. 307–311. [Google Scholar] [CrossRef]
- Hajiakhondi-Meybodi, Z.; Salimibeni, M.; Plataniotis, K.N.; Mohammadi, A. Bluetooth Low Energy-based Angle of Arrival Estimation via Switch Antenna Array for Indoor Localization. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Rustenburg, South Africa, 6–9 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zand, P.; Romme, J.; Govers, J.; Pasveer, F.; Dolmans, G. A high-accuracy phase-based ranging solution with Bluetooth Low Energy (BLE). In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Song, X.; Fan, X.; Xiang, C.; Ye, Q.; Liu, L.; Wang, Z.; He, X.; Yang, N.; Fang, G. A Novel Convolutional Neural Network Based Indoor Localization Framework With Wifi Fingerprinting. IEEE Access 2019, 7, 110698–110709. [Google Scholar] [CrossRef]
- Sun, D.; Wei, E.; Yang, L.; Xu, S. Improving Fingerprint Indoor Localization Using Convolutional Neural Networks. IEEE Access 2020, 8, 193396–193411. [Google Scholar] [CrossRef]
- Wang, X.; Hersche, M.; Tomekce, B.; Kaya, B.; Magno, M.; Benini, L. An Accurate EEGNet-based Motor-Imagery Brain-Computer Interface for Low-Power Edge Computing. In Proceedings of the 2020 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Bari, Italy, 1 June–1 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Giordano, M.; Magno, M. A Battery-Free Long-Range Wireless Smart Camera for Face Recognition. In Proceedings of the 19th ACM Conference on Embedded Networked Sensor Systems, Coimbra, Portugal, 15–17 November 2021; SenSys ’21. Association for Computing Machinery: New York, NY, USA, 2021; pp. 594–595. [Google Scholar] [CrossRef]
- Amsters, R.; Demeester, E.; Stevens, N.; Slaets, P. Calibration of visible light positioning systems with a mobile robot. Sensors 2021, 21, 2394. [Google Scholar] [CrossRef] [PubMed]
- Jianyong, Z.; Haiyong, L.; Zili, C.; Zhaohui, L. RSSI based Bluetooth low energy indoor positioning. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Republic of Korea, 27–30 October 2014; pp. 526–533. [Google Scholar] [CrossRef]
- Friis, H. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Pu, Y.C.; You, P.C. Indoor Positioning System Based on Ble Location Fingerprinting With Classification Approach. Appl. Math. Model. 2018, 62, 654–663. [Google Scholar] [CrossRef]
- Parameswaran, A.T.; Husain, M.I.; Upadhyaya, S. Is rssi a reliable parameter in sensor localization algorithms: An experimental study. In Field Failure Data Analysis Workshop (F2DA09); IEEE Niagara Falls: New York, NY, USA, 2009; Volume 5. [Google Scholar]
- Ólafsdóttir, H.; Ranganathan, A.; Capkun, S. On the Security of Carrier Phase-based Ranging. In Cryptographic Hardware and Embedded Systems–CHES 2017; Springer: Cham, Switzerland, 2017; pp. 490–509. [Google Scholar] [CrossRef]
- Lu, X.; Yin, Y.; Zhao, N.; Wei, H. Indoor Positioning Experiment Based on Phase Ranging with Bluetooth Low Energy (BLE). J. Phys. Conf. Ser. 2021, 1971, 012044. [Google Scholar] [CrossRef]
- Klančar, G.; Zdešar, A.; Blažič, S.; Škrjanc, I. Chapter 5—Sensors Used in Mobile Systems. In Wheeled Mobile Robotics; Klančar, G., Zdešar, A., Blažič, S., Škrjanc, I., Eds.; Butterworth-Heinemann: Oxford, UK, 2017; p. 251. [Google Scholar] [CrossRef]
- Sturgess, B.N.; Carey, F.T. Trilateration. In The Surveying Handbook; Springer: Boston, MA, USA, 1987; pp. 340–389. [Google Scholar] [CrossRef]
- Björck, Å. Least squares methods. In Handbook of Numerical Analysis; Elsevier: Berlin/Heidelberg, Germany, 1990; Volume 1, pp. 465–652. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, Y. Quality of Trilateration: Confidence-Based Iterative Localization. IEEE Trans. Parallel Distrib. Syst. 2010, 21, 631–640. [Google Scholar] [CrossRef]
- Peng, X.; Chen, R.; Yu, K.; Ye, F.; Xue, W. An Improved Weighted K-Nearest Neighbor Algorithm for Indoor Localization. Electronics 2020, 9, 2117. [Google Scholar] [CrossRef]
- Royall, R.M. A Class of Non-Parametric Estimates of a Smooth Regression Function. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1966. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Beacons | ||||||||
|---|---|---|---|---|---|---|---|---|
| Avg. Statistics | 3 | 4 | 5 | 6 | ||||
| RSSI | MCPD | RSSI | MCPD | RSSI | MCPD | RSSI | MCPD | |
| Avg. | 2.239 m | 0.696 m | 2.111 m | 0.610 m | 2.069 m | 0.539 m | 2.037 m | 0.579 m |
| Var. | 1.373 m | 0.129 m | 1.397 m | 0.050 m | 1.356 m | 0.027 m | 1.350 m | 0.020 m |
| Std. | 1.167 m | 0.311 m | 1.178 m | 0.204 m | 1.160 m | 0.158 m | 1.162 m | 0.143 m |
| Min. | 0.048 m | 0.067 m | 0.048 m | 0.145 m | 0.095 m | 0.115 m | 0.245 m | 0.245 m |
| Max. | 5.379 m | 2.702 m | 5.111 m | 1.441 m | 5.027 m | 0.879 m | 4.990 m | 0.786 m |
| Method | ||||
|---|---|---|---|---|
| 2-Norm | ∞-Norm | 2-Norm | ∞-Norm | |
| RSSI | 1.369 m | 1.410 m | 1.766 m | 1.999 m |
| MCPD | 0.577 m | 0.501 m | 0.753 m | 0.788 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortesi, S.; Vogt, C.; Magno, M. Comparison between an RSSI- and an MCPD-Based BLE Indoor Localization System. Computers 2023, 12, 59. https://doi.org/10.3390/computers12030059
Cortesi S, Vogt C, Magno M. Comparison between an RSSI- and an MCPD-Based BLE Indoor Localization System. Computers. 2023; 12(3):59. https://doi.org/10.3390/computers12030059
Chicago/Turabian StyleCortesi, Silvano, Christian Vogt, and Michele Magno. 2023. "Comparison between an RSSI- and an MCPD-Based BLE Indoor Localization System" Computers 12, no. 3: 59. https://doi.org/10.3390/computers12030059