
An Improved Blind Zone Channelization Structure and Rapid Implementation Method

Abstract
:1. Introduction
2. Polyphase Filtering Digital Channelization Model
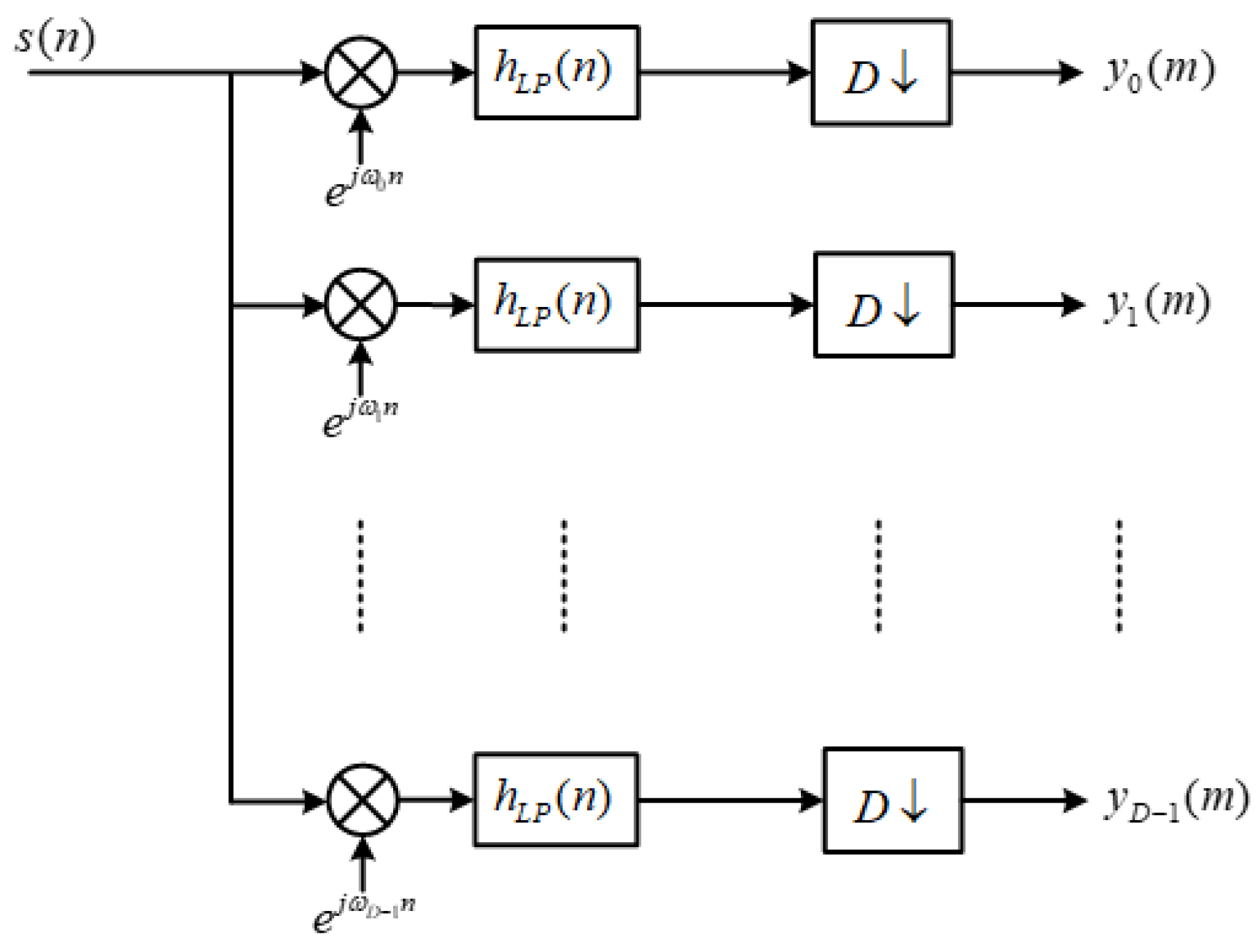
2.1. The Original Structure
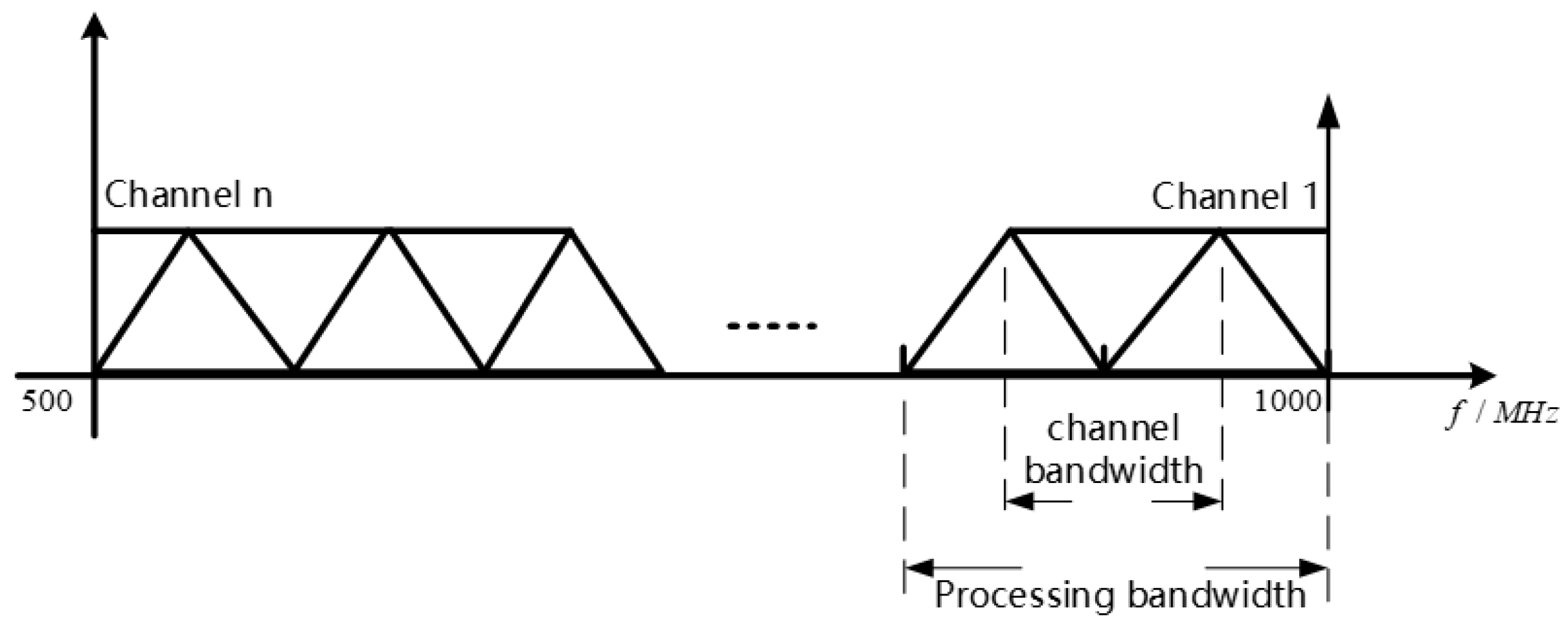
2.2. Subchannelization
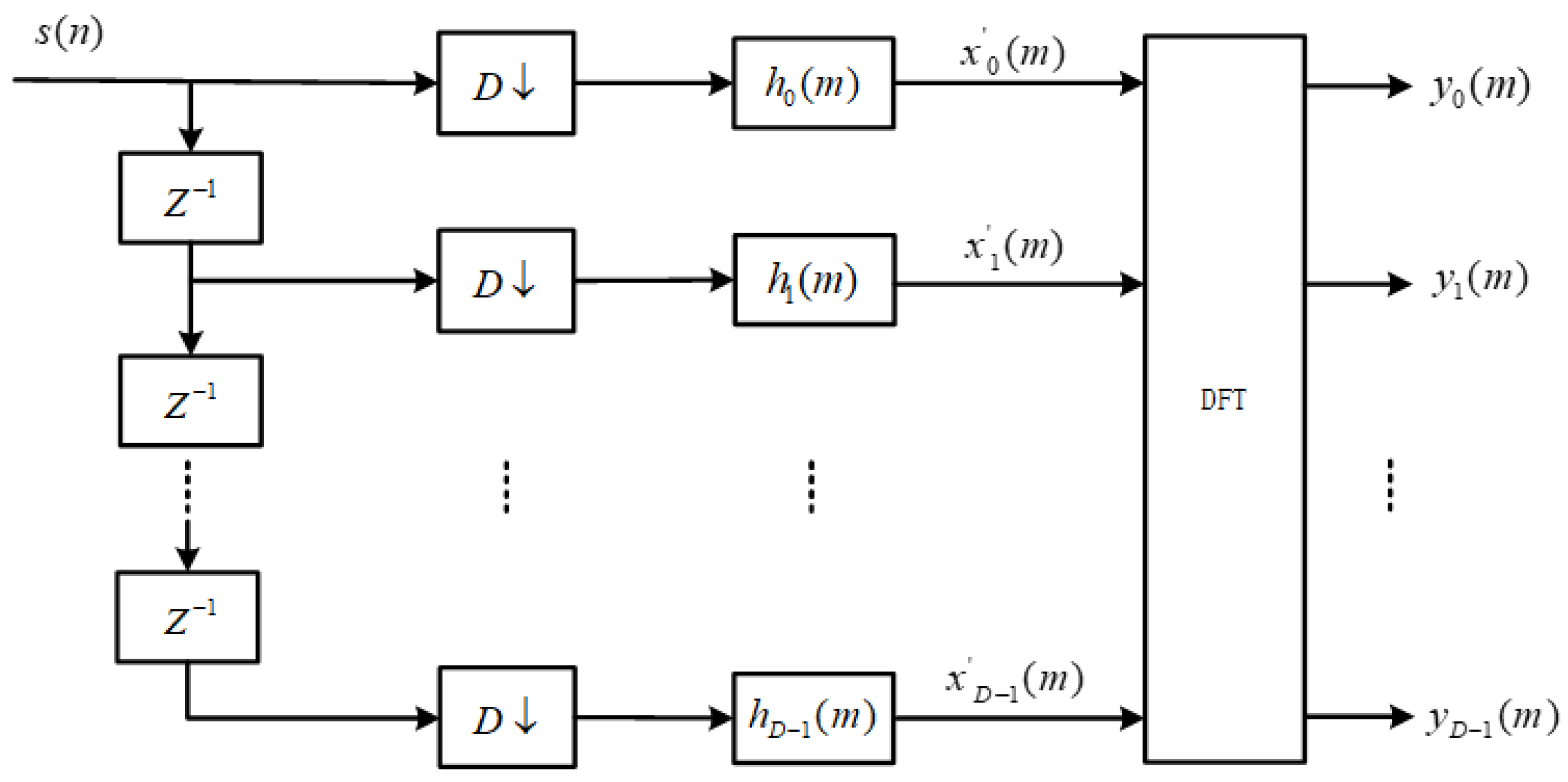
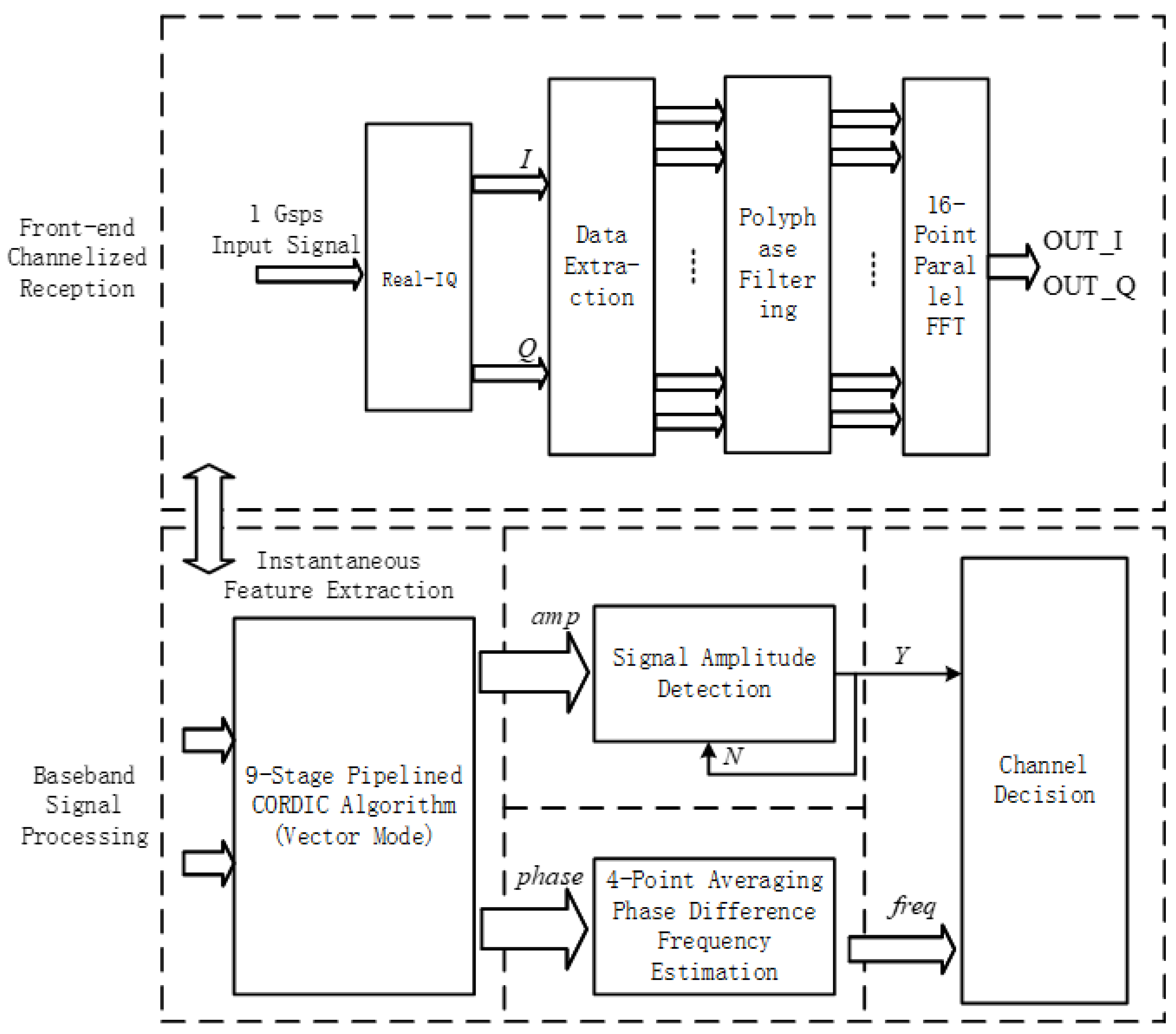
2.3. Improved Non-Blind Channelization Structure
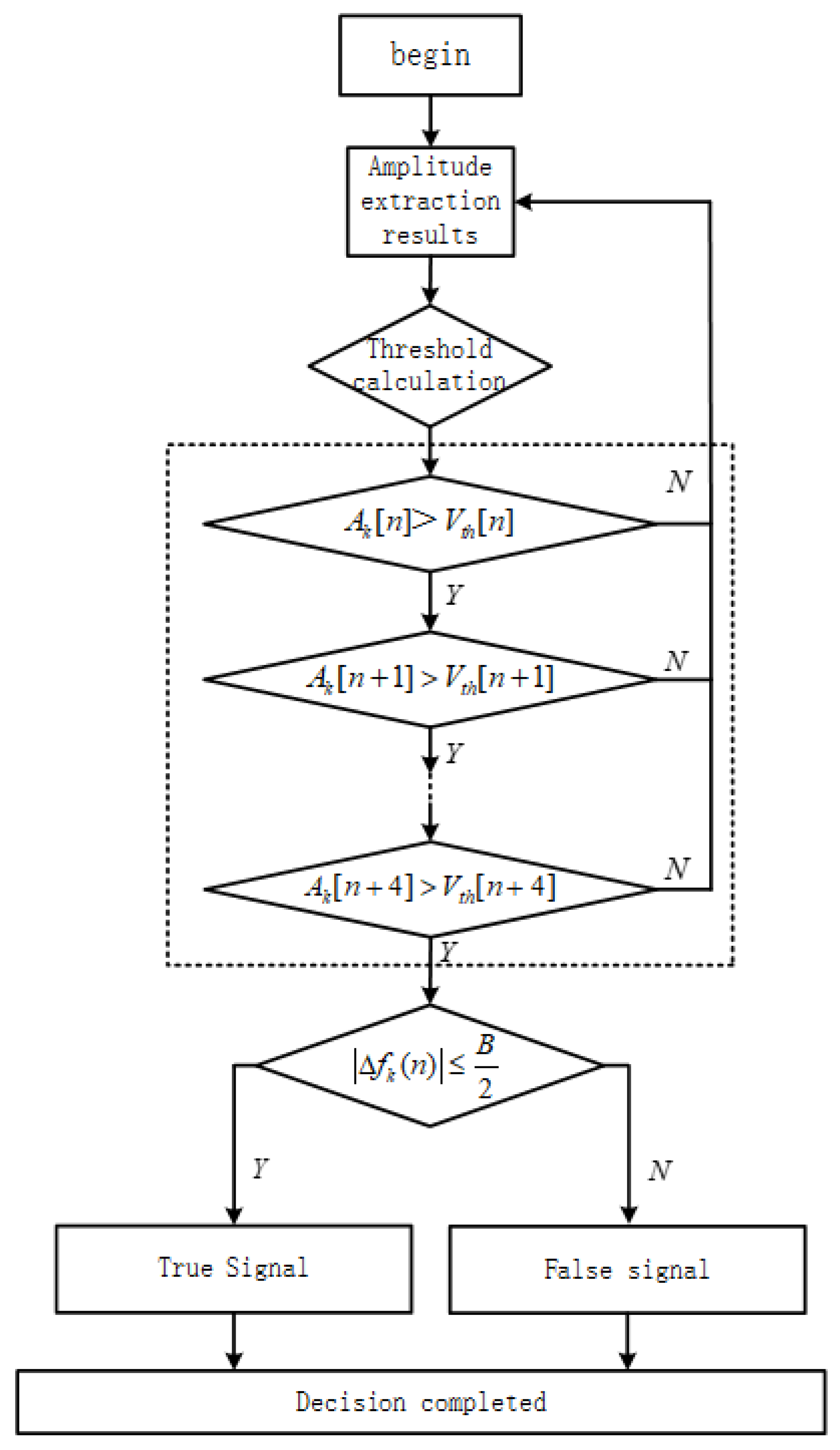
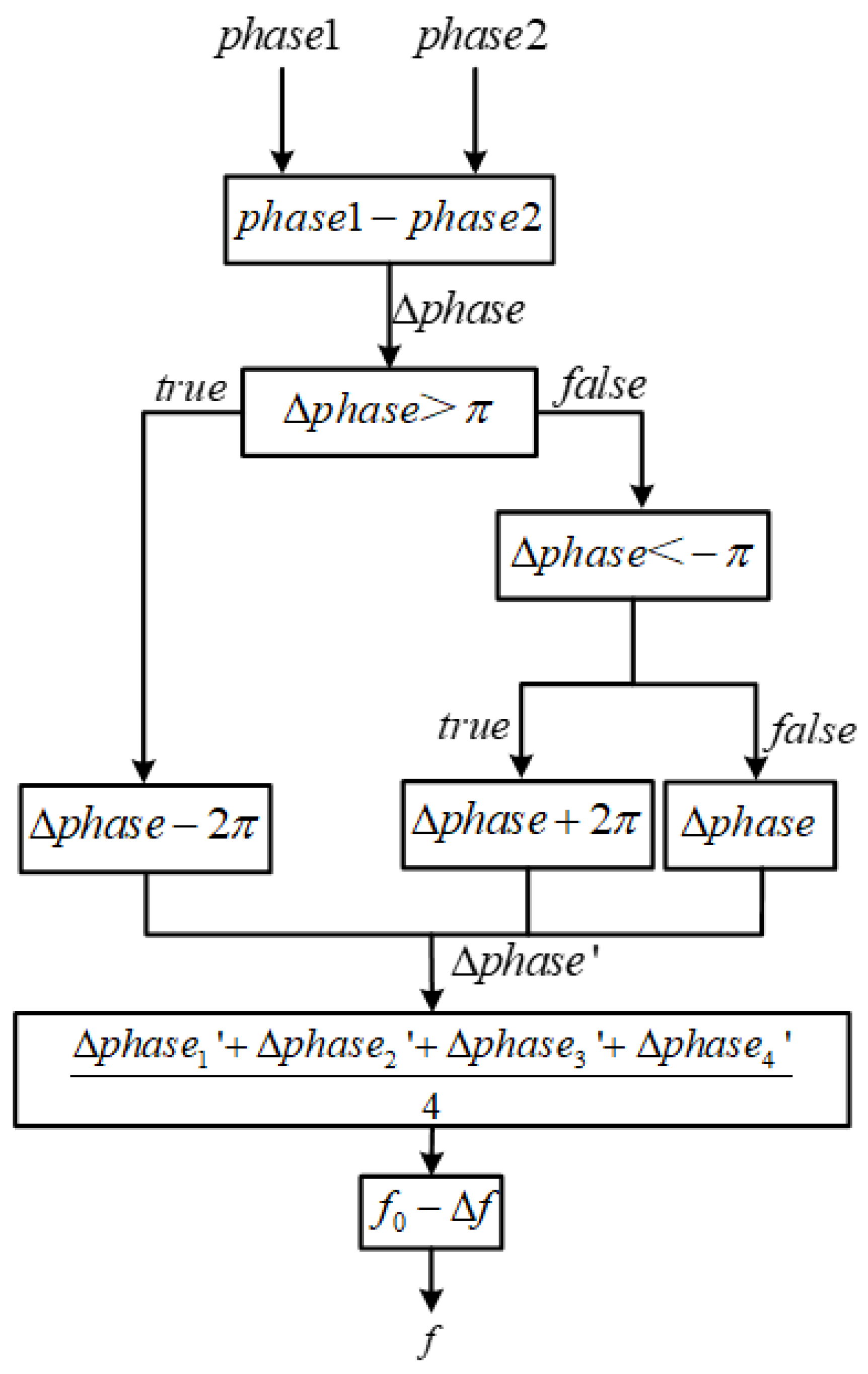
2.4. Improved Channel Decision Module
- Set the detection threshold .
- Use the signal amplitude calculated from the CORDIC module as input. To reduce the impact of the signal-to-noise ratio, consider a signal to be present in the channel if the amplitude values are greater than the detection threshold for five consecutive times. Then, proceed to the channel decision-making part.
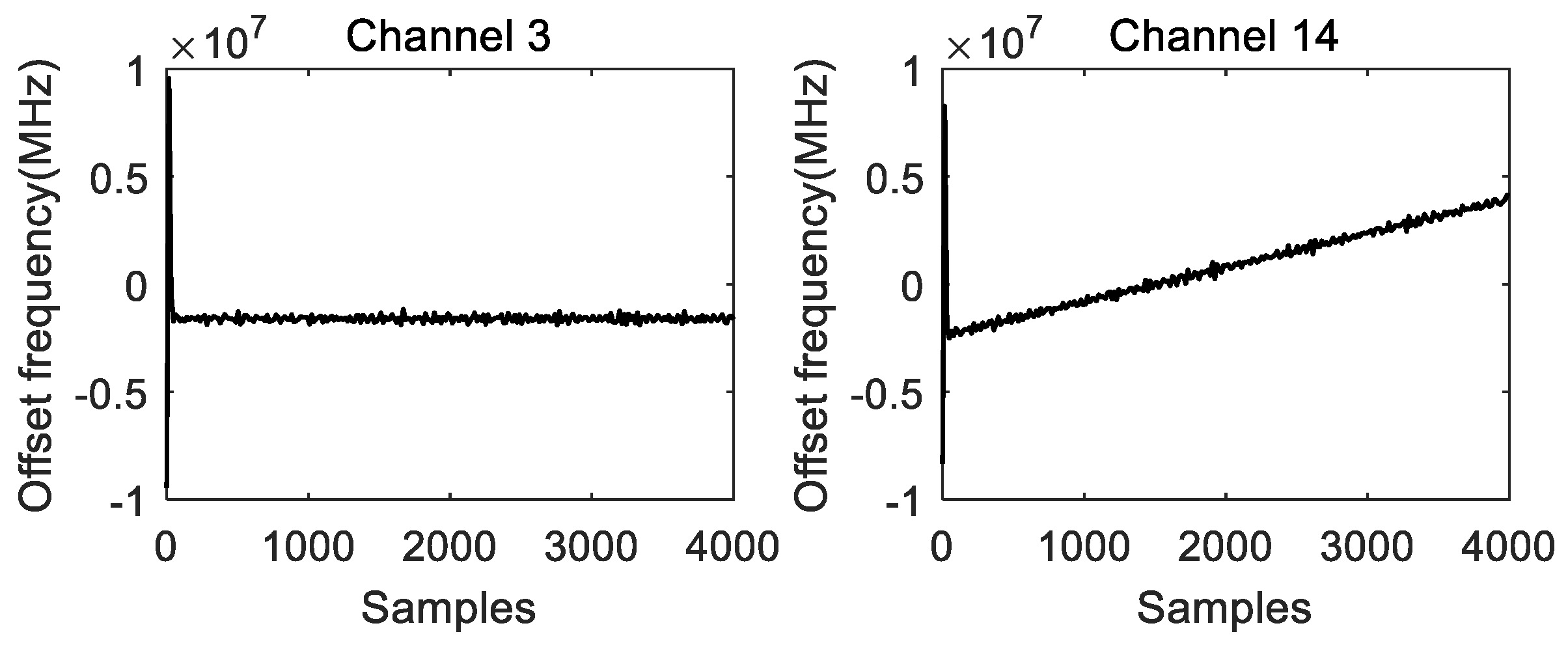
- Finally, perform a phase-difference-based instantaneous frequency estimation for the channel. The frequency deviation value represents the frequency deviation of the signal from the center of the channel. If is less than half of the bandwidth, B, of the channel, it is considered that the signal is within the current channel, otherwise it is considered a false signal.
3. Simulation and Implementation of Improved Structure
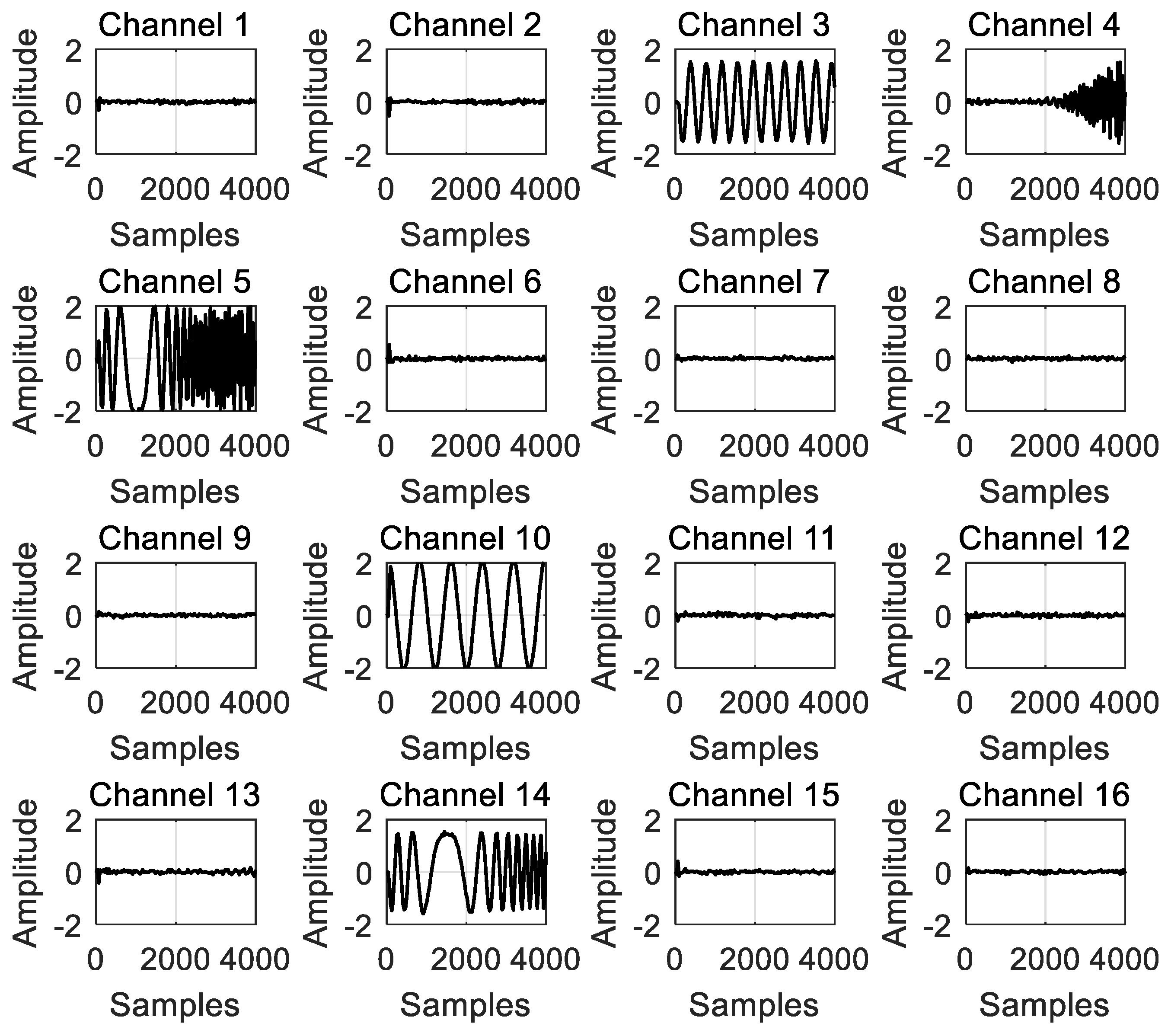
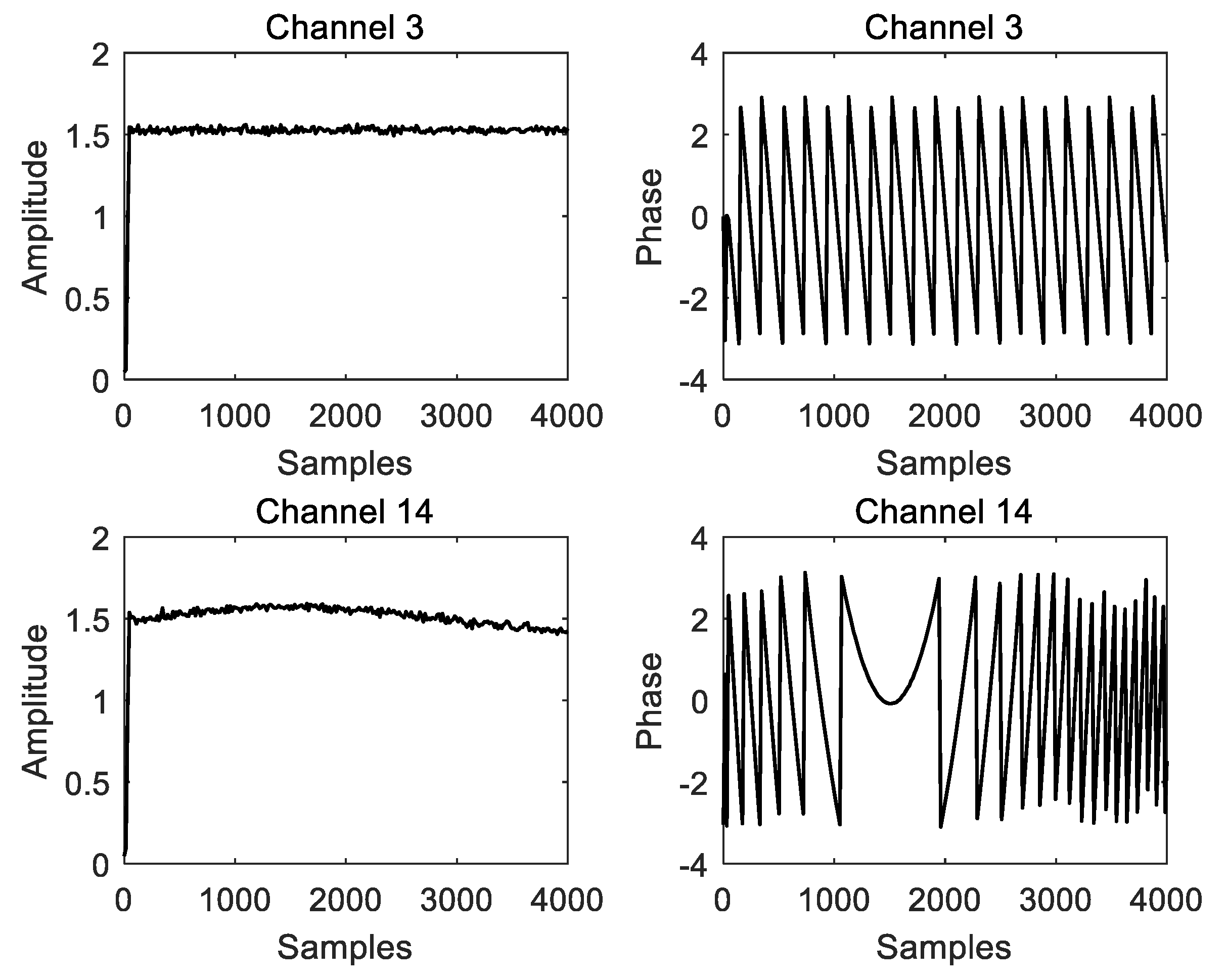
3.1. Receiver System Simulation
3.2. Hardware Implementation
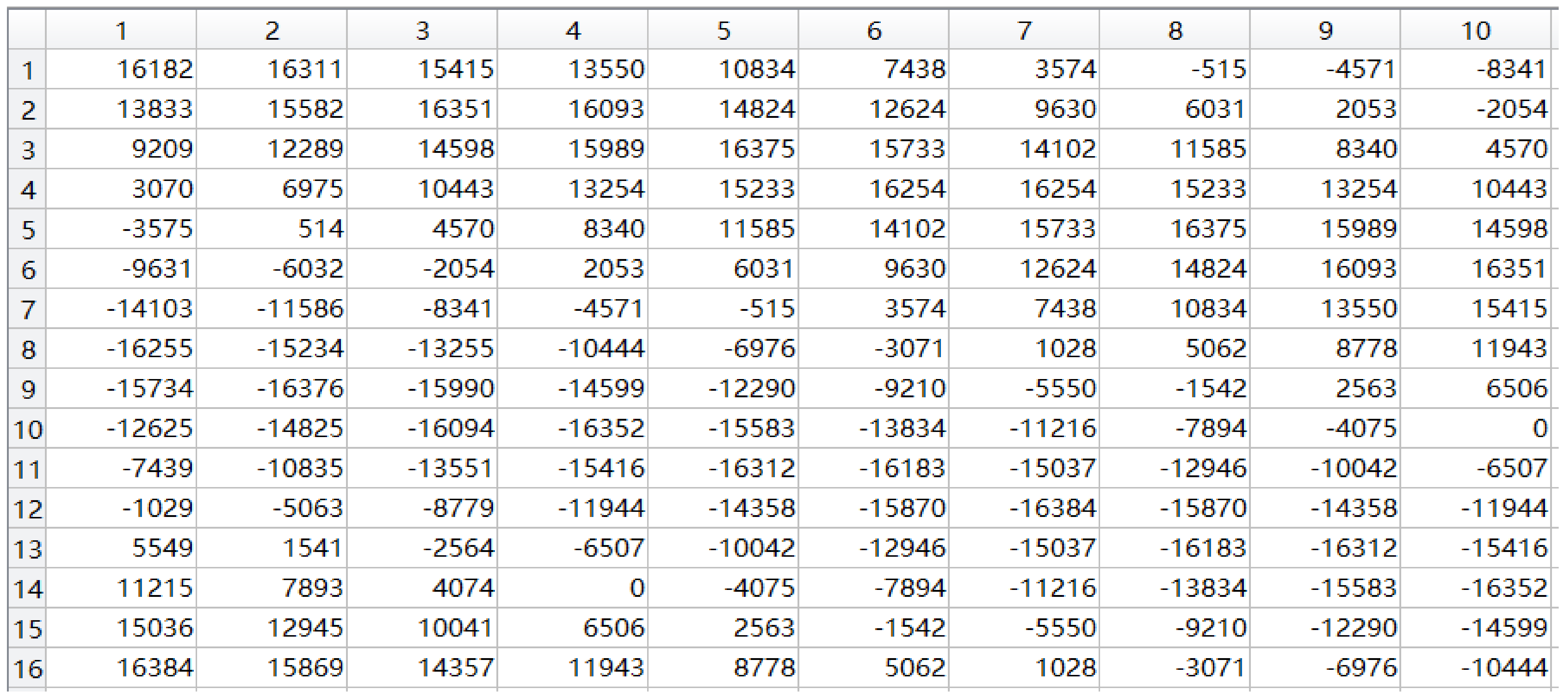
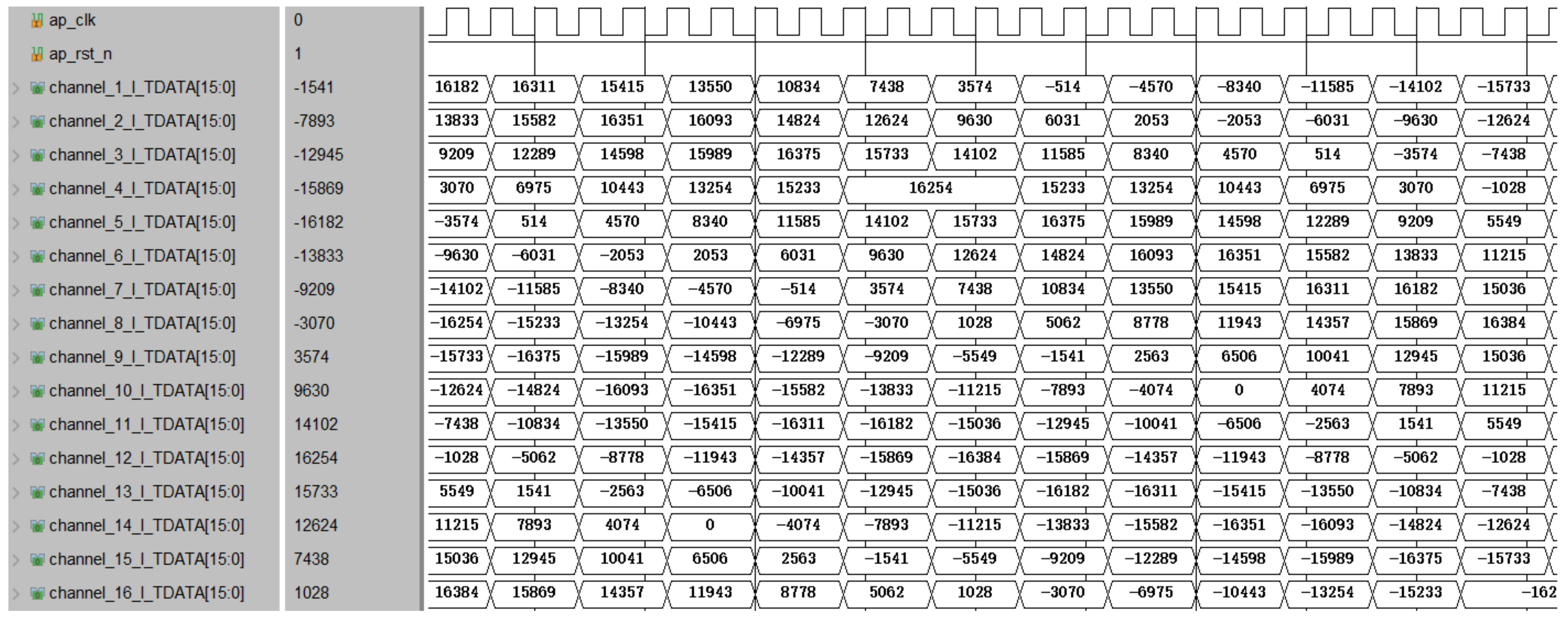
3.3. Data Extraction and Routing Module
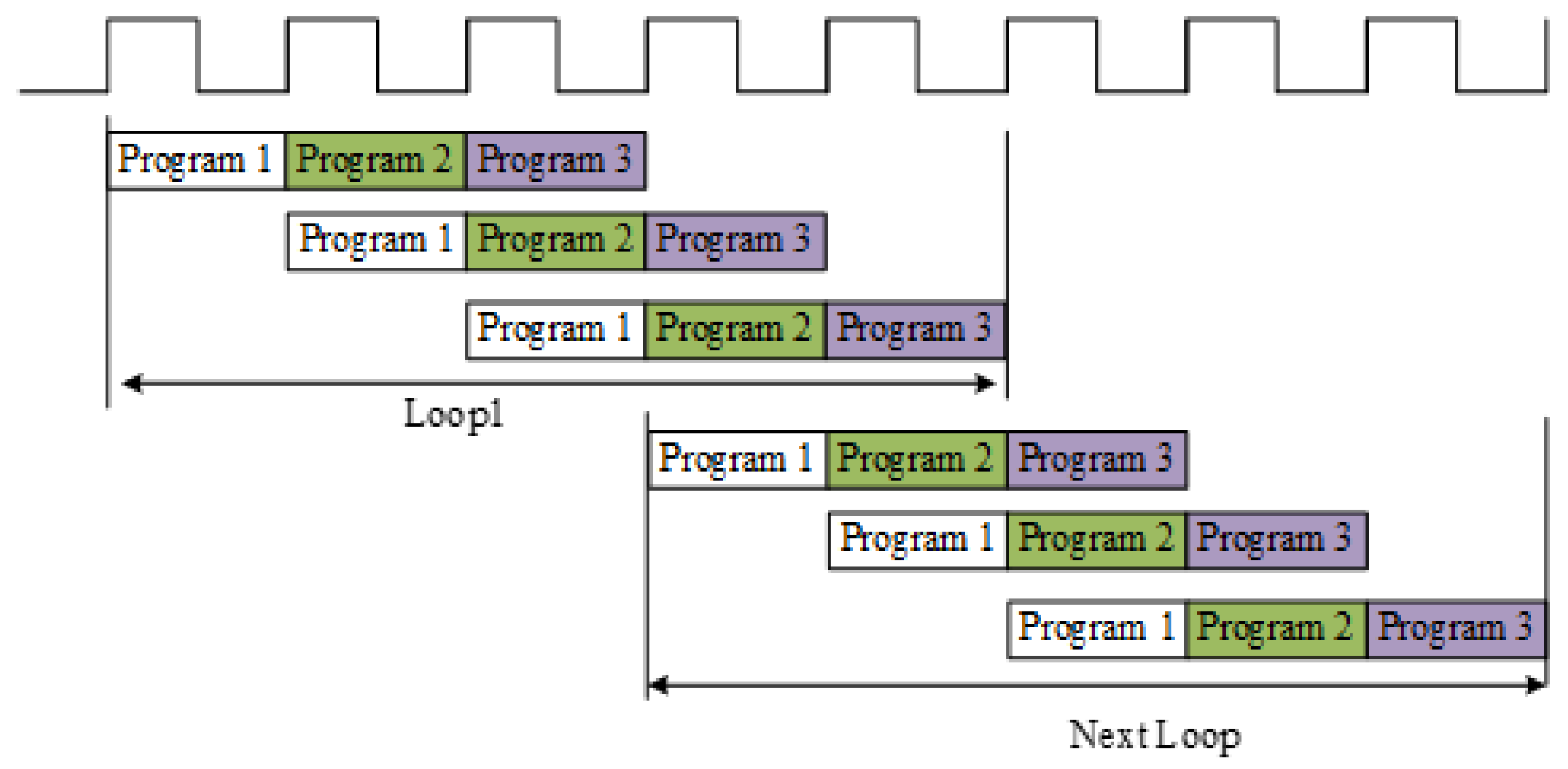
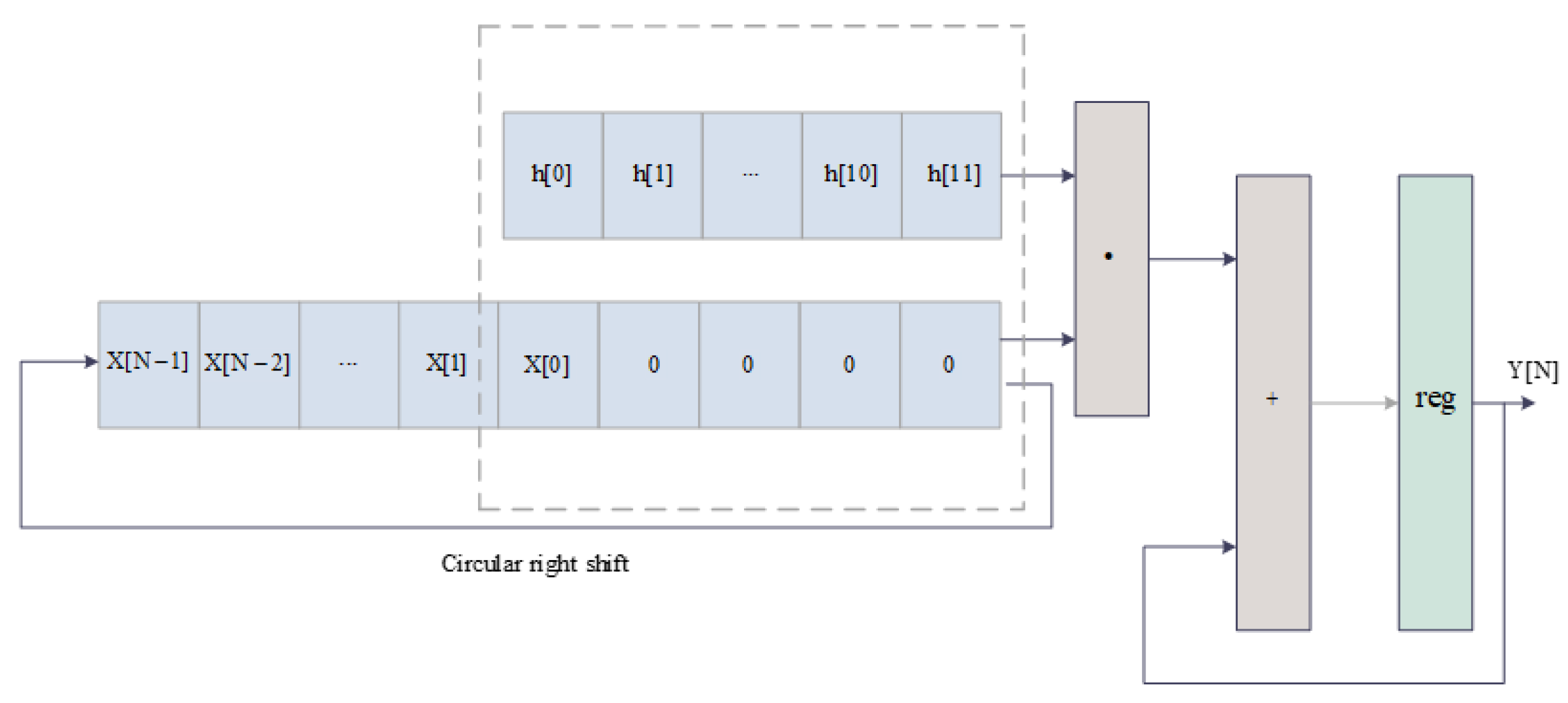
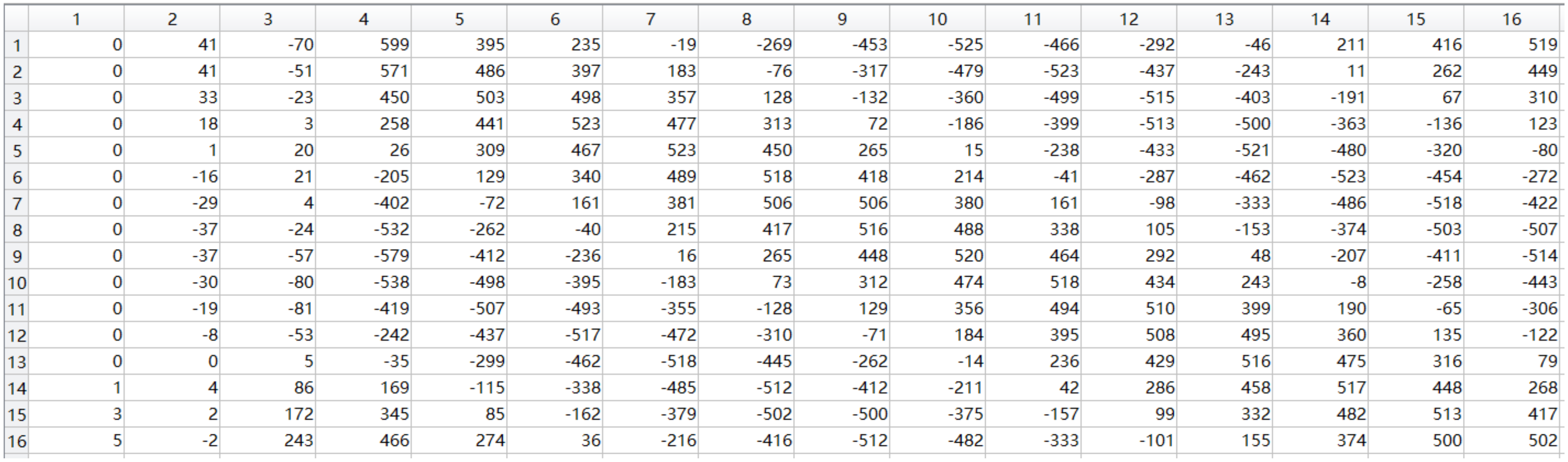
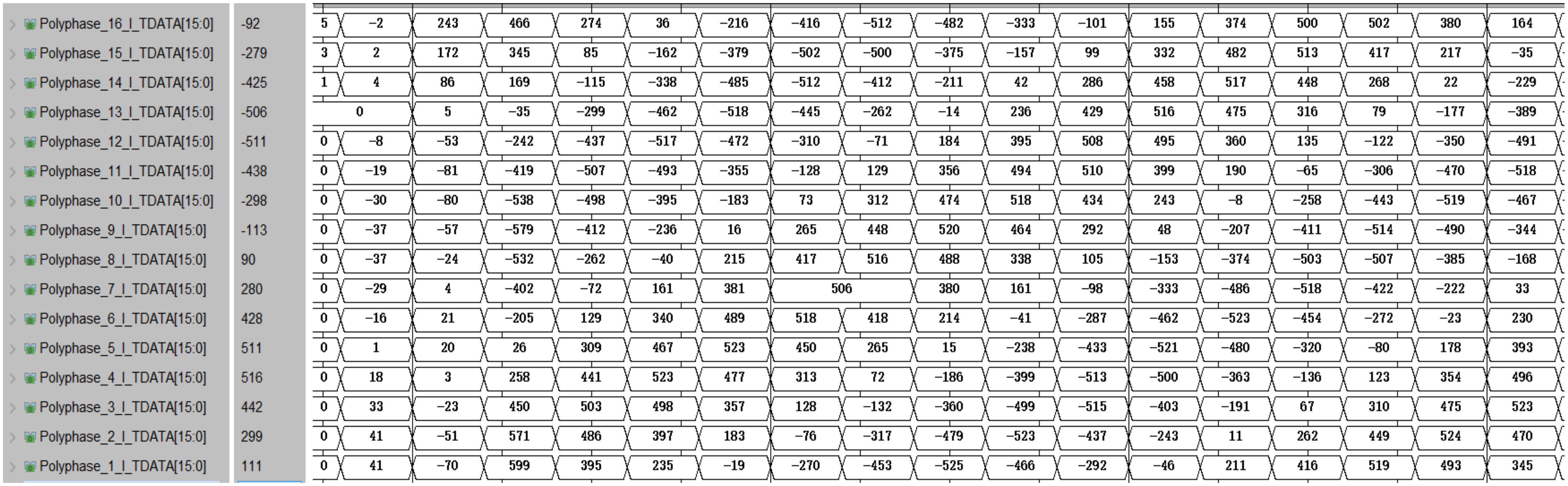
3.4. Polyphase Filtering Module
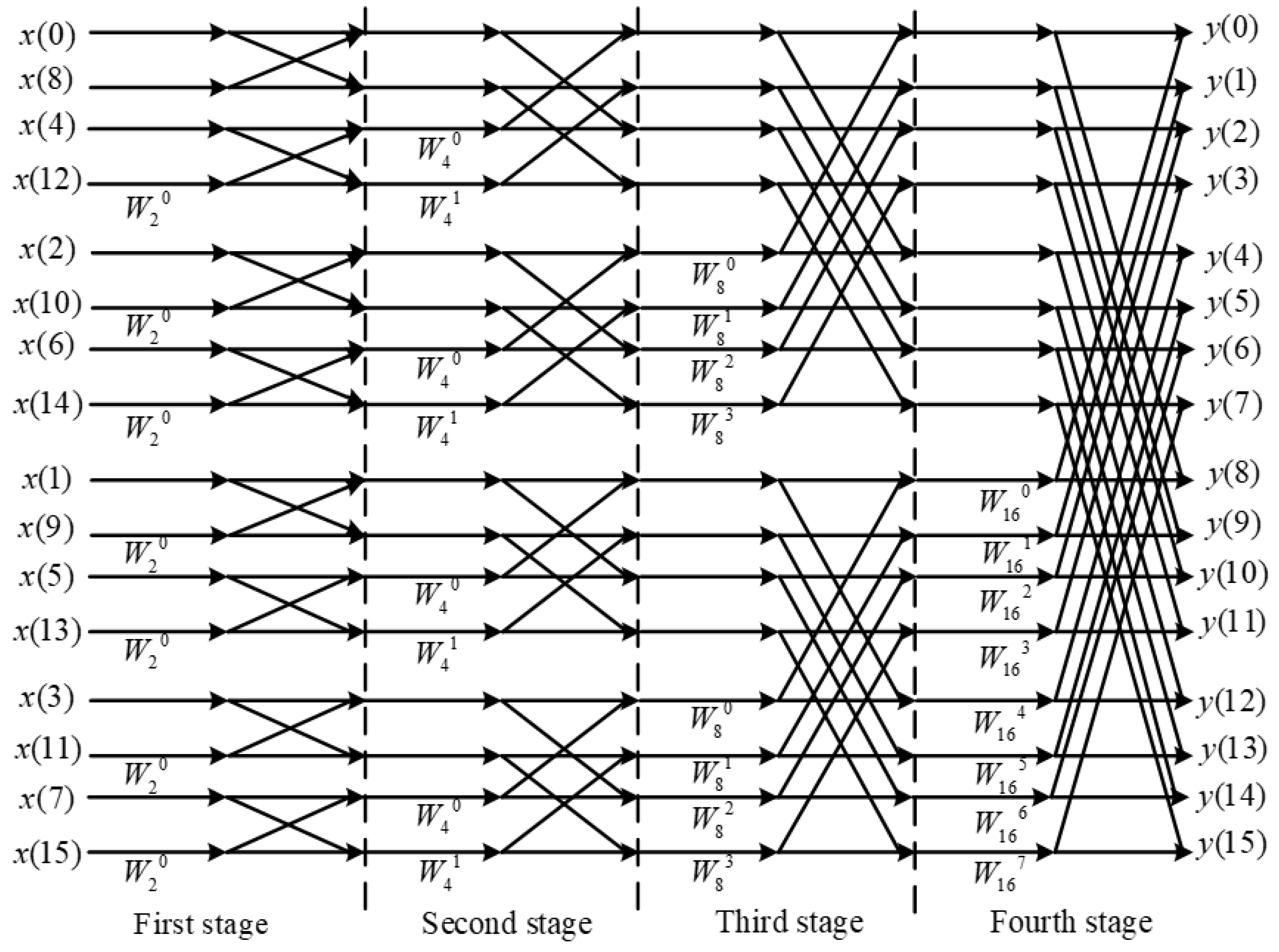
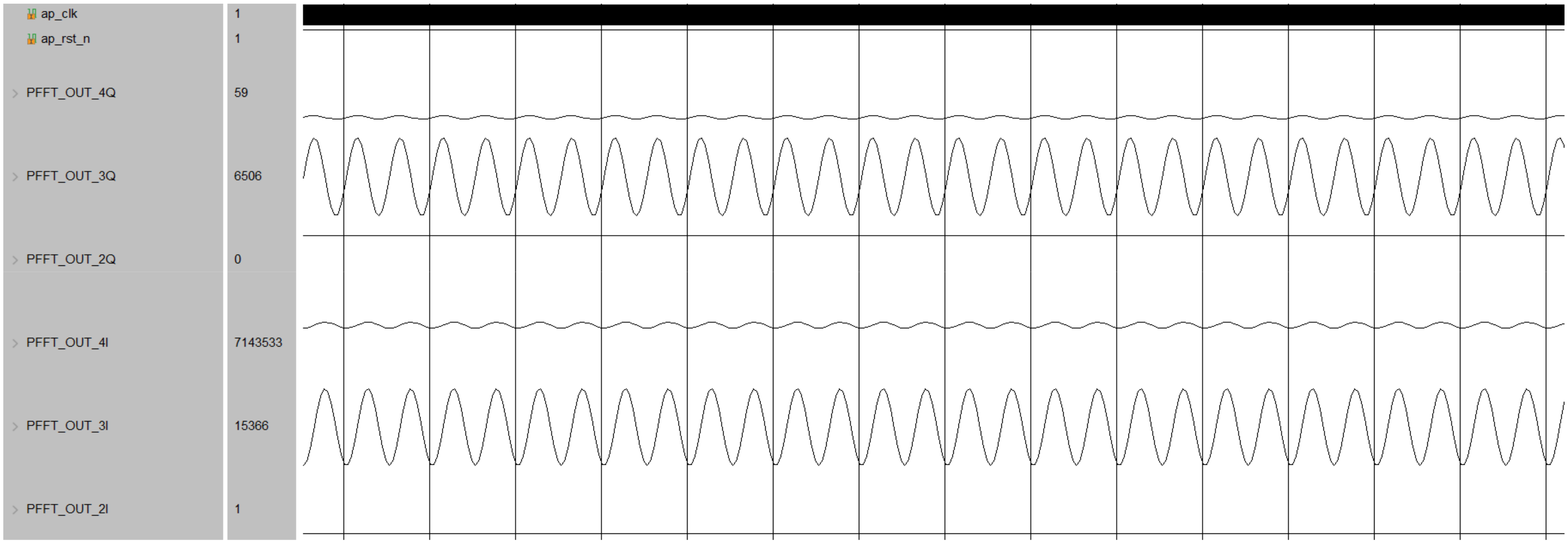
3.5. The Fully Parallel FFT Module
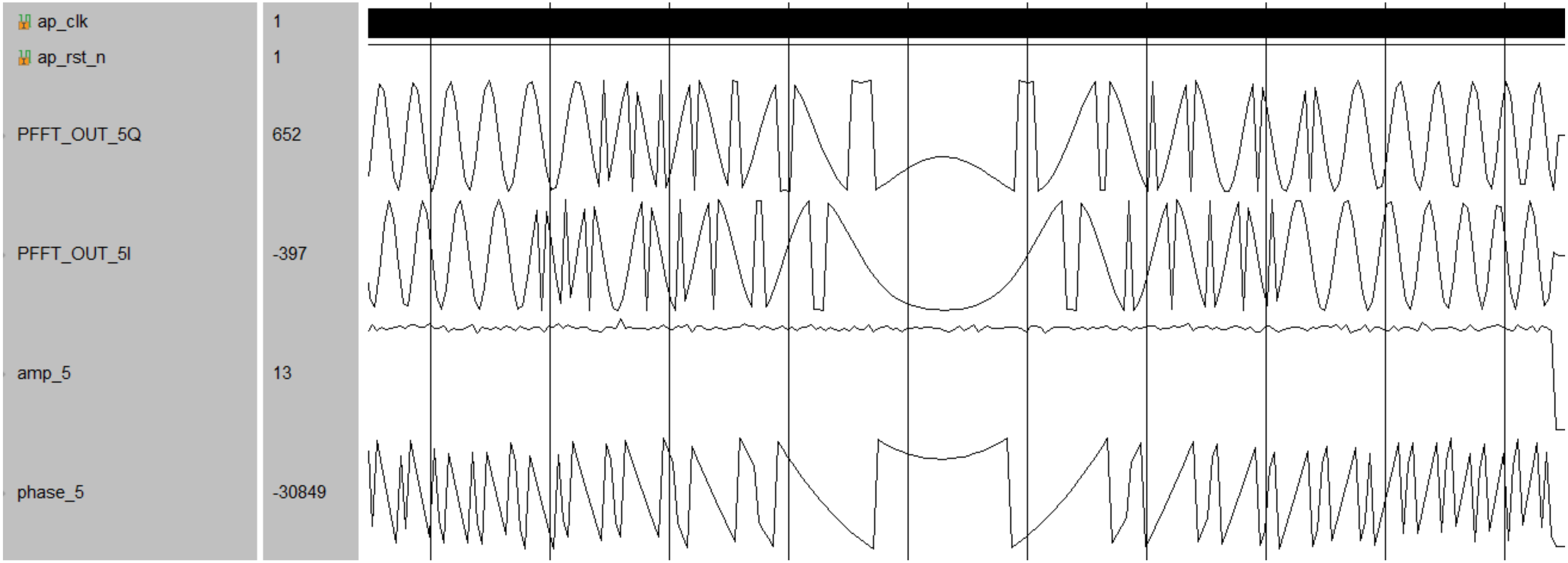
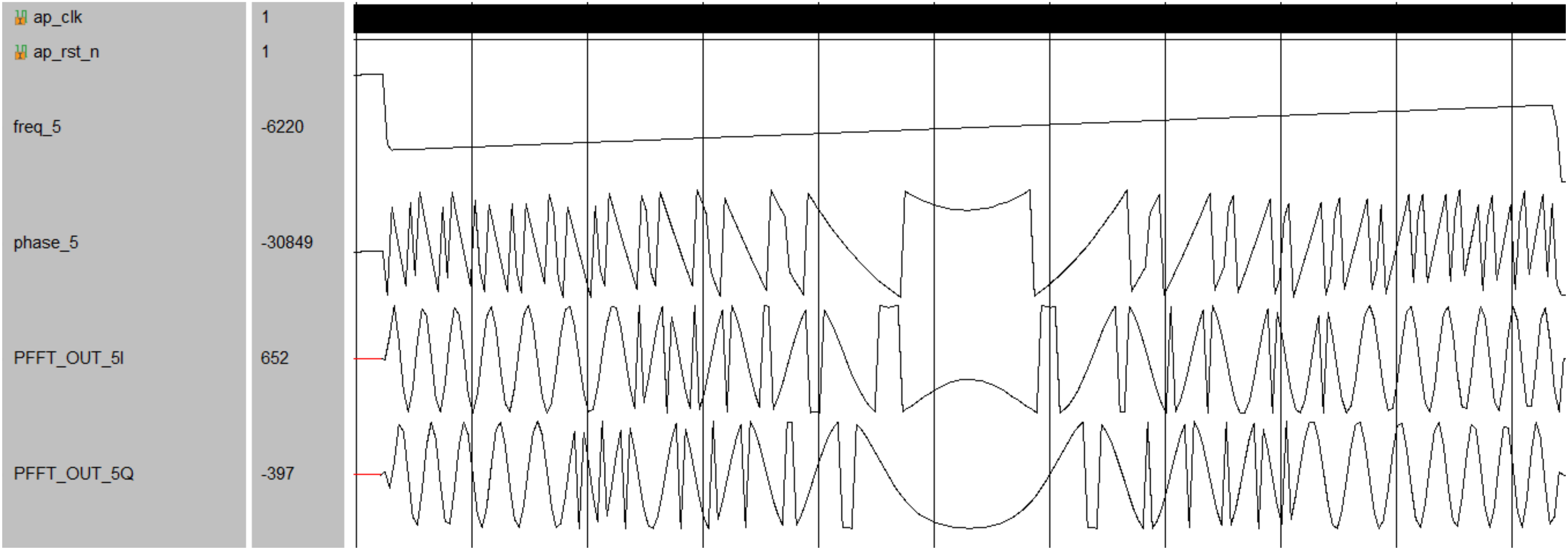
3.6. Channel Decision Module
4. Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Man, J.; Li, W.; Wang, H.; Ma, W. On the technology of frequency hopping communication network-station selection. In Proceedings of the 2021 International Conference on Electronics, Circuits and Information Engineering (ECIE), Zhengzhou, China, 22–24 January 2021; pp. 35–41. [Google Scholar]
- Chen, G.; Liu, L. Overview of Carrier frequency concealment Radar Signal Design. In Proceedings of the 2018 International Conference on Mechanical, Electronic, Control and Automation Engineering (MECAE 2018), Qingdao, China, 30–31 March 2018; Atlantis Press: Amsterdam, The Netherlands, 2018; pp. 497–500. [Google Scholar]
- Obadi, A.B.; Soh, P.J.; Aldayel, O.; Al-Doori, M.H.; Mercuri, M.; Schreurs, D. A survey on vital signs detection using radar techniques and processing with FPGA implementation. IEEE Circuits Syst. Mag. 2021, 21, 41–74. [Google Scholar] [CrossRef]
- Ghelfi, P.; Scotti, F.; Onori, D.; Bogoni, A. Photonics for ultrawideband RF spectral analysis in electronic warfare applications. IEEE J. Sel. Top. Quantum Electron. 2019, 25, 1–9. [Google Scholar] [CrossRef]
- Sharma, P.; Sarma, K.K.; Mastorakis, N.E. Artificial intelligence aided electronic warfare systems-recent trends and evolving applications. IEEE Access 2020, 8, 224761–224780. [Google Scholar] [CrossRef]
- Wang, H.; Lü, Y. A digital instantaneous frequency measurement receiver based on sub-Nyquist sampling. In Proceedings of the IEEE 10th International Conference On Signal Processing Proceedings, Beijing, China, 24–28 October 2010; pp. 1902–1905. [Google Scholar]
- Udayakumar, R.; Khanaa, V.; Saravanan, T. Chromatic dispersion compensation in optical fiber communication system and its simulation. Indian J. Sci. Technol. 2013, 6, 4762–4766. [Google Scholar] [CrossRef]
- Misra, V.; Bozkurt, A.; Calhoun, B.; Jackson, T.; Jur, J.S.; Lach, J.; Lee, B.; Muth, J.; Oralkan, Ö.; Öztürk, M.; et al. Flexible technologies for self-powered wearable health and environmental sensing. Proc. IEEE 2015, 103, 665–681. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, H.; Zhang, S.; Liu, Y. Analog-to-digital converters using photonic technology. Chin. Sci. Bull. 2014, 59, 2666–2671. [Google Scholar] [CrossRef]
- Cordeiro, R.F.; Prata, A.; Oliveira, A.S.R.; Vieira, J.M.N.; De Carvalho, N.B. Agile all-digital RF transceiver implemented in FPGA. IEEE Trans. Microw. Theory Tech. 2017, 65, 4229–4240. [Google Scholar] [CrossRef]
- Ma, D.; Du, Y.; Xu, C.Z.; Shao, Y.-Z.; Wang, S.-J.; Ping, Y.-F. Research on Total Probability Digital Channelization Technique without Blind Zone. In Wireless and Satellite Systems, Proceedings of the11th EAI International Conference, WiSATS 2020, Nanjing, China, 17–18 September 2020; Proceedings, Part II; Springer International Publishing: Cham, Switzerland, 2021; pp. 480–486. [Google Scholar]
- Comoretto, G.; Chiello, R.; Roberts, M.; Halsall, R.; Adami, K.Z.; Alderighi, M.; Aminaei, A.; Baker, J.; Belli, C.; Chiarucci, S.; et al. The signal processing firmware for the low frequency aperture array. J. Astron. Instrum. 2017, 6, 1641015. [Google Scholar] [CrossRef]
- Lu, W.-X.; Xu, P.; Cao, Y.-J. Modified Design of Digital Channelized Structure and Detection Method. Mod. Def. Technol. 2018, 46, 73–79. [Google Scholar]
- Abo-Zahhad, M. ECG signal compression using discrete wavelet transform. In Discrete Wavelet Transforms: Theory and Applications; IntechOpen: London, UK, 2011; pp. 143–168. [Google Scholar]
- Zheng, J.; Wu, W.; Zhao, Y.; Yuan, S.; Dong, R.; Zhang, L.; Fu, H. A Parallel Approach for Oil Palm Tree Detection on a SW26010 Many-Core Processor. In Proceedings of the IGARSS 2022–2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022. [Google Scholar]
- Li, W.; He, C.; Fu, H.; Zheng, J.; Dong, R.; Xia, M.; Yu, L.; Luk, W. A Real-Time Tree Crown Detection Approach for Large-Scale Remote Sensing Images on FPGAs. Remote Sens. 2019, 11, 1025. [Google Scholar] [CrossRef]
- Tian, Q.; Jiang, A.; Bi, B. Design and FPGA Implementation of a Digital Channelized Receiver. In Proceedings of the 2022 IEEE 2nd International Conference on Information Communication and Software Engineering (ICICSE), Chongqing, China, 18–20 March 2022; pp. 200–204. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, M.; Ji, S.; Wang, J. Design of Multi-channel Real-time Signal Acquisition System. J. Phys. Conf. Ser. 2022, 2189, 012007. [Google Scholar] [CrossRef]
- Özkan, M.A.; Pérard-Gayot, A.; Membarth, R.; Slusallek, P.; Leißa, R.; Hack, S.; Teich, J.; Hannig, F. AnyHLS: High-level synthesis with partial evaluation. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2020, 39, 3202–3214. [Google Scholar] [CrossRef]
- Wang, H.; Lü, Y.Y. A digital channelized receiver architecture with low calculation cost. In Proceedings of the 2010 Second Pacific-Asia Conference on Circuits, Communications and System, Beijing, China, 1–2 August 2010; Volume 1, pp. 1–4. [Google Scholar]
- Bai, F.; Gagar, D.; Foote, P.; Zhao, Y. Comparison of alternatives to amplitude thresholding for onset detection of acoustic emission signals. Mech. Syst. Signal Process. 2017, 84, 717–730. [Google Scholar] [CrossRef]
- Mohamed, S.M.; Sayed, W.S.; Radwan, A.G.; Said, L.A. FPGA implementation of reconfigurable CORDIC algorithm and a memristive chaotic system with transcendental nonlinearities. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 69, 2885–2892. [Google Scholar] [CrossRef]
- Li, T.; Chen, Z. A wideband reconnaissance receiver design based on real-time spectrum analysis technology. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; pp. 1463–1467. [Google Scholar]
- Cong, J.; Liu, B.; Neuendorffer, S.; Noguera, J.; Vissers, K.; Zhang, Z. High-level synthesis for FPGAs: From prototyping to deployment. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2011, 30, 473–491. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Z.K.; Deng, Q.X. Design and FPGA implementation of a reconfigurable 1024-channel channelization architecture for SDR application. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2016, 24, 2449–2461. [Google Scholar] [CrossRef]
- Rauf, A.; Pasha, M.A.; Masud, S. Towards design and automation of a scalable split-radix FFT processor for high throughput applications. Microprocess. Microsyst. 2019, 65, 148–157. [Google Scholar] [CrossRef]
- Roslidar, R.; Zulfikar, Z. MATLAB based Design for an 8-point Discrete Fourier Transform formed on Products of Rademacher Functions. J. Telecommun. Electron. Comput. Eng. 2018, 10, 39–43. [Google Scholar]
- Rachana, M.K.; Manju, V.M. Study on Area Efficient Radix-2 FFT Architecture to Process Twin Data Streams for High Speed Real Time Application. Indian J. Emerg. Electron. Comput. Commun. 2017, 4, 638–643. [Google Scholar]
- Murali, A.; Kakarla, H.K.; Anitha Priyadarshini, G.M. Improved design debugging architecture using low power serial communication protocols for signal processing applications. Int. J. Speech Technol. 2021, 24, 291–302. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Signals | Frequency (MHz) | Amplitude (V) |
|---|---|---|
| Signal 1-sin | 935 | 1.5 |
| Signal 2-chirp | 870–890 | 2 |
| Signal 3-sin | 720 | 2 |
| Signal 4-chirp | 590–600 | 1.5 |
| Channel Number | Channel Center Frequency (MHz) | Range of Subchannel Frequency (MHz) |
|---|---|---|
| 1 | 1000 | 1000–984.375 |
| 2 | 968.75 | 984.375~953.125 |
| 3 | 937.5 | 953.125~921.875 |
| 4 | 906.25 | 921.875~890.625 |
| 5 | 875 | 890.625~859.375 |
| 6 | 843.75 | 859.375~828.125 |
| 7 | 812.5 | 828.125~796.875 |
| 8 | 781.25 | 796.875~765.625 |
| 9 | 750 | 765.625~734.375 |
| 10 | 718.75 | 734.375~703.125 |
| 11 | 687.5 | 703.125~671.875 |
| 12 | 656.25 | 671.875~640.625 |
| 13 | 625 | 640.625~609.375 |
| 14 | 593.75 | 609.375~578.125 |
| 15 | 562.5 | 578.125~546.875 |
| 16 | 531.25 | 546.875~515.625 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, Z.; Liu, H. An Improved Blind Zone Channelization Structure and Rapid Implementation Method. Micromachines 2023, 14, 1091. https://doi.org/10.3390/mi14051091
Jia Z, Liu H. An Improved Blind Zone Channelization Structure and Rapid Implementation Method. Micromachines. 2023; 14(5):1091. https://doi.org/10.3390/mi14051091
Chicago/Turabian StyleJia, Ziliang, and Hongxia Liu. 2023. "An Improved Blind Zone Channelization Structure and Rapid Implementation Method" Micromachines 14, no. 5: 1091. https://doi.org/10.3390/mi14051091