
Holographic Optical Tweezers That Use an Improved Gerchberg–Saxton Algorithm
Abstract
:1. Introduction
2. Basic Theory
- (1)
- First, the initial phase is added to the predetermined incident light field as the initial phase value. Assuming that the initial phase is unknown, the value of the initial phase will usually be 0 or random.
- (2)
- The light field on the output plane is obtained via forward Fourier transform of the initial light field on the input plane.
- (3)
- On the output plane, keeping the phase constant, the expected optical field amplitude is used to replace the calculated optical field amplitude.
- (4)
- Then, the light field of the input plane is obtained via inverse Fourier transform of the replaced light field on the output plane.
- (5)
- Next, on the input plane, the amplitude of the light field is replaced by the amplitude of the desired light field while keeping the phase unchanged.
- (6)
- Then, the forward Fourier transform is carried out again and continues to cycle until the judgment function finally converges.
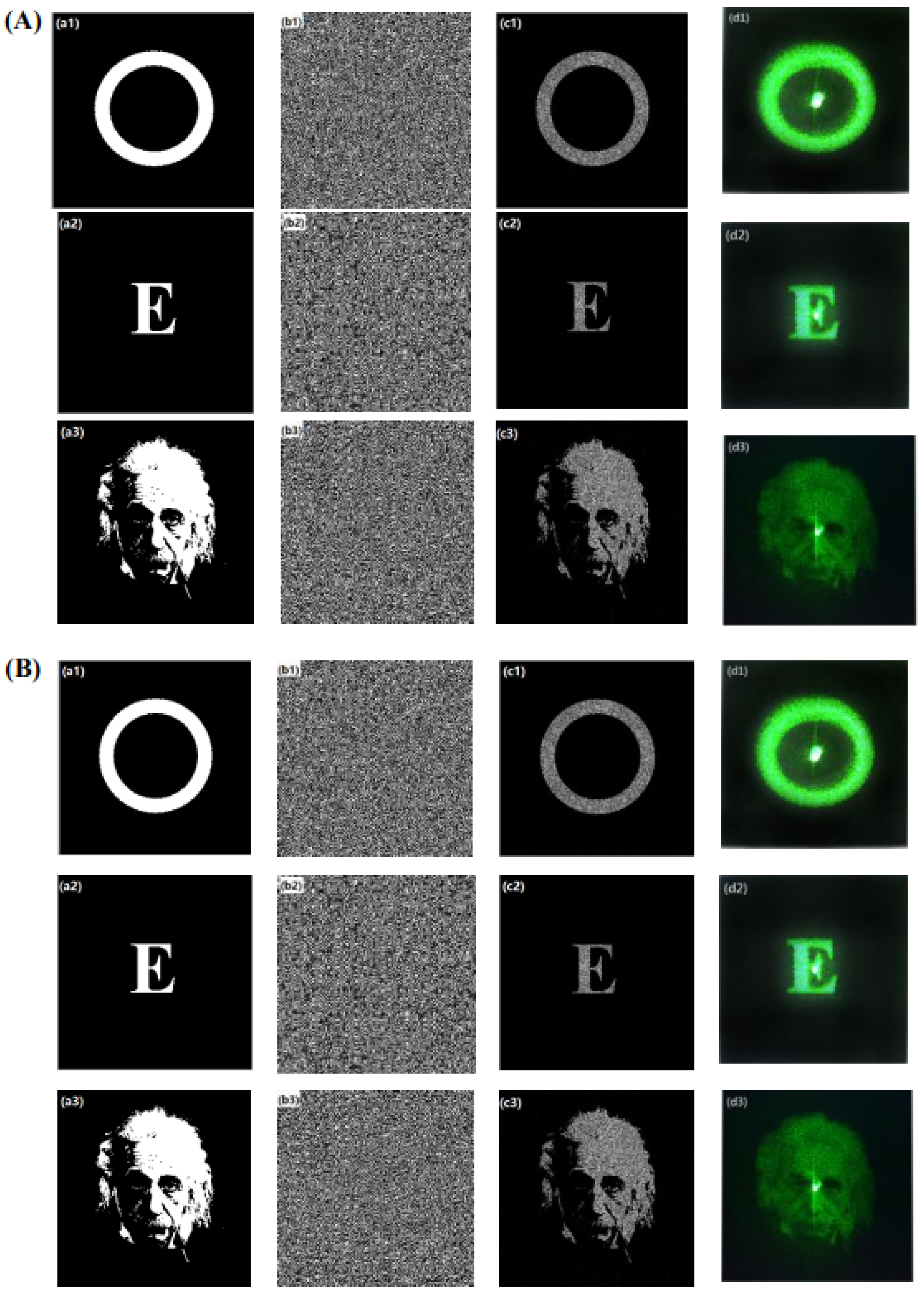
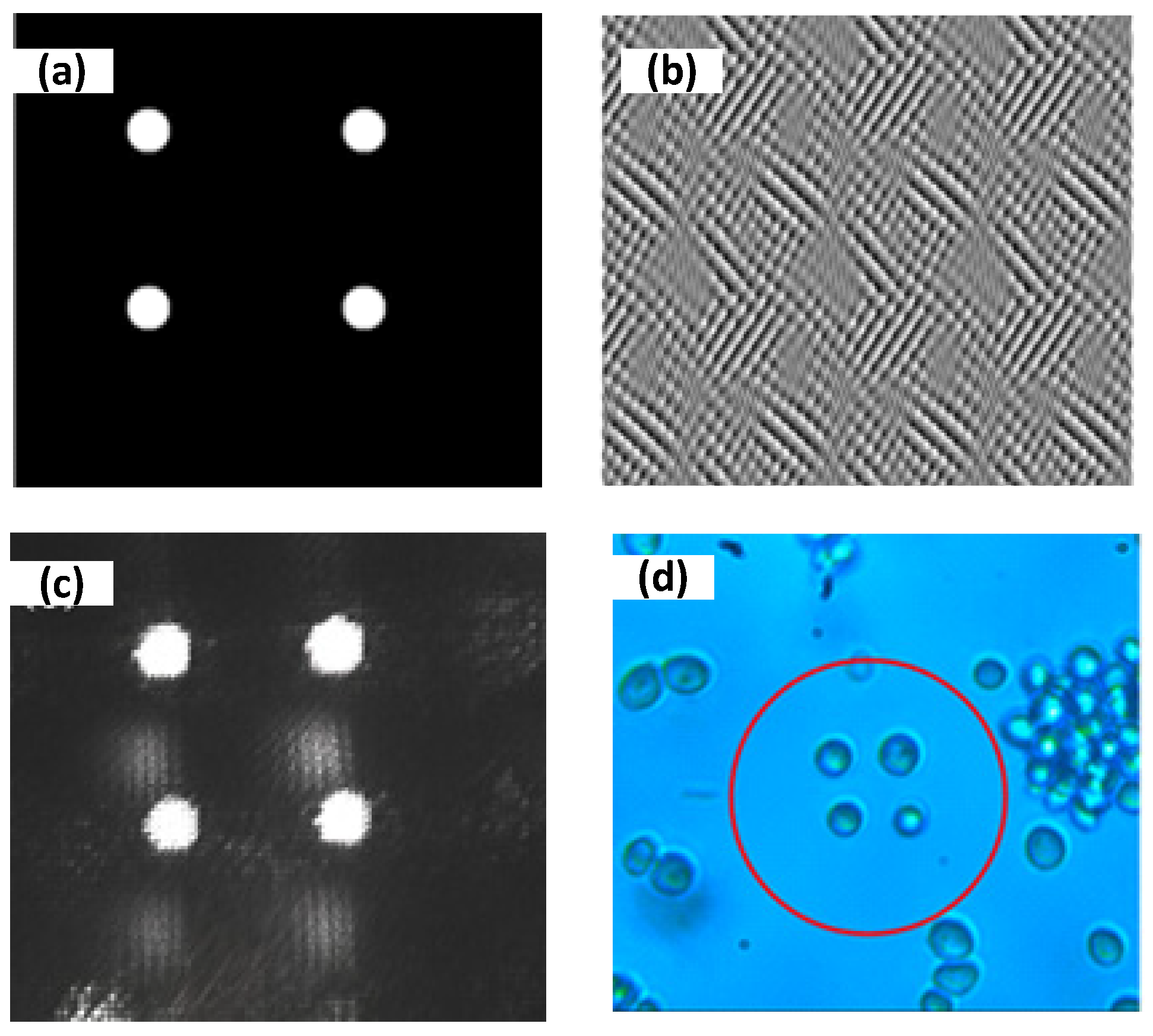
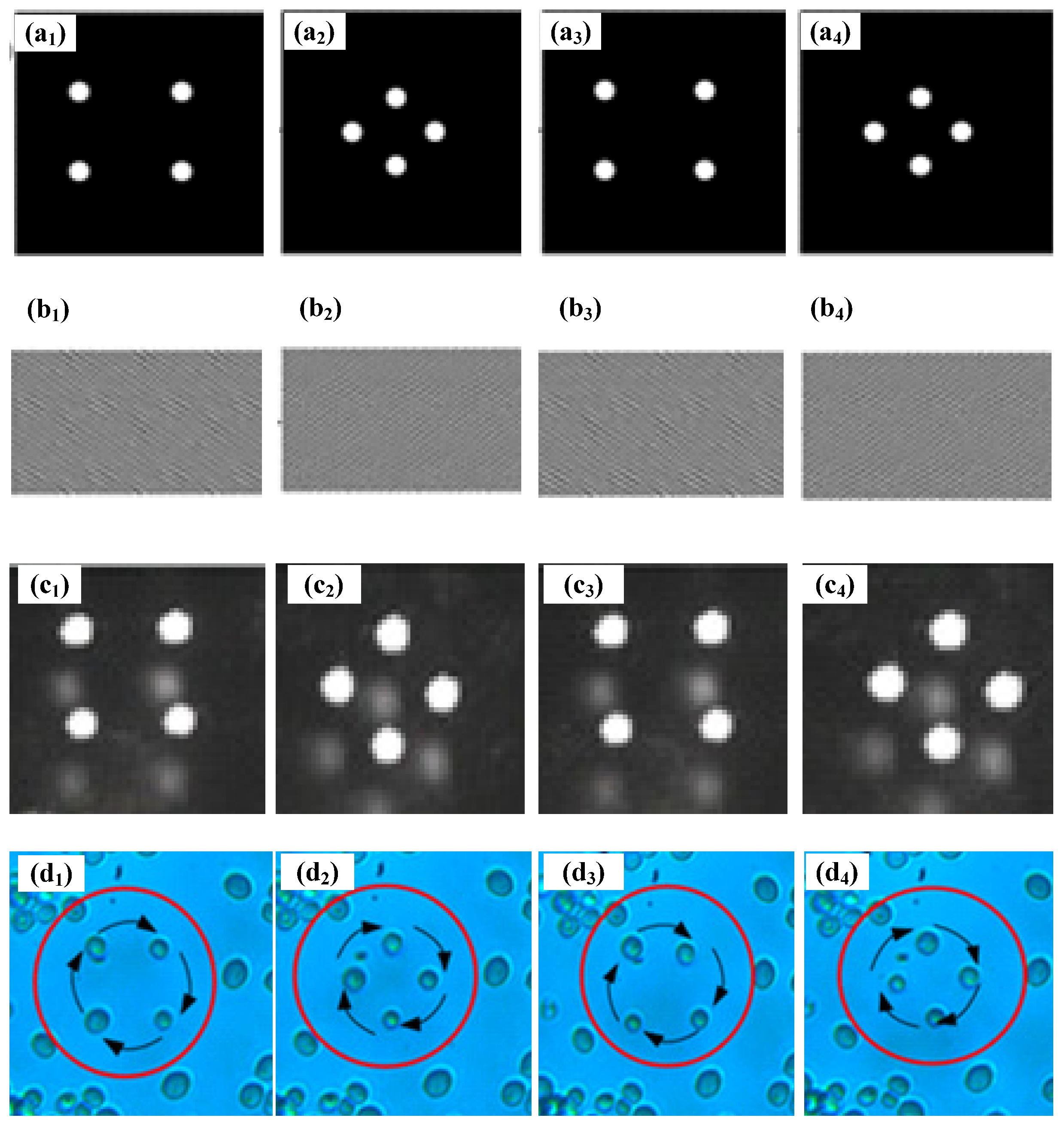
3. Theoretical and Experimental Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Keir, C.N.; Steven, M.B. Optical trapping. Rev. Sci. Instrum. 2004, 75, 2787–2809. [Google Scholar]
- Favre-Bulle, I.; Scott, E. Optical tweezers across scales in cell biology. Trends Cell Biol. 2022, 32, 932–946. [Google Scholar] [CrossRef] [PubMed]
- Leach, J.; Sinclair, G.; Jordan, P.; Johannes, C.; Miles, J.P.; Jon, C.; Zsolt, J.L. 3D manipulation of particles into crystal structures using holographic optical tweezers. Opt. Express 2004, 12, 220–226. [Google Scholar] [CrossRef] [PubMed]
- Bzdek, B.R.; Collard, L.; Sprittles, J.E.; Hudson, A.J. Dynamic measurements and simulations of airborne picolitre-droplet coalescence in holographic optical tweezers. J. Chem. Phys. 2016, 145, 054502. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhou, Y.; Cai, Y.N.; Zhang, Y.N. Generation of Hybrid Optical Trap Array by Holographic Optical Tweezers. Front. Phys. 2021, 9, 591747. [Google Scholar] [CrossRef]
- Shaw, L.; Spadaccini, C.M.; Hopkins, J.B. Scanning holographic optical tweezers. Opt. Lett. 2017, 42, 2862–2864. [Google Scholar] [CrossRef] [PubMed]
- Liang, Y.S.; Yao, B.L.; Ma, B.H.; Lei, M. Holographic Optical Trapping and Manipulation Based on Phase-only Liquid-Crystal Spatial Light Modulator. Acta Optica Sinica 2016, 36, 0309001. [Google Scholar] [CrossRef]
- Gerchberg, R.W.; Saxton, W.O. A practical algorithm for the determination of phase from image and diffraction plane pictures. Optik 1972, 35, 237–246. [Google Scholar]
- Jennifer, E.C.; Brian, A.K.; David, G.G. Dynamic holographic optical tweezers. Opt. Commun. 2002, 207, 169–175. [Google Scholar]
- Sinclair, G.; Leach, J.; Jordan, P.; Gibson, G.; Yao, E.; Laczik, Z.J.; Padgett, M.J.; Courtial, J. Interactive application in holographic optical tweezers of a multi-plane Gerchberg-Saxton algorithm for three-dimensional light shaping. Opt. Express 2004, 12, 1665–1670. [Google Scholar] [CrossRef]
- Tao, T.; Li, J.; Long, Q.; Wu, X.P. 3D trapping and manipulation of micro-particles using holographic optical tweezers with optimized computer-generated holograms. Chin. Opt. Lett. 2011, 9, 120010. [Google Scholar] [CrossRef]
- Chen, H.; Guo, Y.F.; Chen, Z.Z.; Hao, J.J.; Xu, J.; Wang, H.T.; Ding, J.P. Holographic optical tweezers obtained by using the three-dimensional Gerchberg-Saxton algorithm. J. Opt. 2013, 15, 035401. [Google Scholar] [CrossRef]
- Pollari, R.; Milstein, J. Improved axial trapping with holographic optical tweezers. Opt. Express 2015, 23, 28857–28867. [Google Scholar] [CrossRef]
- Cao, B.; Kelbauskas, L.; Chan, S. Rotation of single live mammalian cells using dynamic holographic optical tweezers. Opt. Laser. Eng. 2017, 92, 70–75. [Google Scholar]
- Rafael, A.B.S.; Antonio, A.R.N.; Marcos, R.R.G. Optical trapping with non-diffracting Airy beams array using a holographic optical tweezers. Opt. Las. Tech. 2020, 135, 106678. [Google Scholar]
- Cai, Y.N.; Yan, S.H.; Wang, Z.J.; Li, R.Z.; Liang, Y.S.; Zhou, Y.; Li, X.; Yu, X.H.; Lei, M.; Yao, B.L. Rapid tilted-plane Gerchberg-Saxton algorithm for holographic optical tweezers. Opt. Express 2020, 28, 12729–12739. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Li, R.Z.; Yu, X.H.; Yan, S.H.; Li, X.; Gao, W.Y.; Liu, C.; Peng, T.; Yang, Y.L.; Min, J.W.; et al. Progress in Study and Application of Optical Field Modulation Technology Based on Liquid Crystal Spatial Light Modulators. Acta. Photonica Sin. 2021, 50, 1123001. [Google Scholar]
- Wu, Y.; Wang, J.; Chen, C.; Liu, C.; Jin, F.; Chen, N. Adaptive weighted Gerchberg-Saxton algorithm for generation of phase-only hologram with artifacts suppression. Opt. Express 2021, 29, 1412–1427. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Keesling, A.; Omran, A.; Levine, H.; Bernien, H.; Greiner, M.; Lukin, M.; Englund, D. Large-scale uniform optical focus array generation with a phase spatial light modulator. Opt. Lett. 2019, 44, 3178–3181. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.C.; Cheng, C.J. Holographic Optical Tweezers: Techniques and Biomedical Applications. Appl. Sci. 2022, 12, 10244. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Desired Image | η | T-GS | I-GS | ||
|---|---|---|---|---|---|
| n | SSE | n | SSE | ||
| a1 | 0.960 | 28 | 0.0022 | 22 | 0.0022 |
| 0.965 | 91 | 0.0021 | 72 | 0.0021 | |
| a2 | 0.960 | 29 | 0.0022 | 23 | 0.0022 |
| 0.965 | 94 | 0.0021 | 74 | 0.0021 | |
| a3 | 0.960 | 32 | 0.0022 | 26 | 0.0022 |
| 0.965 | 98 | 0.0021 | 77 | 0.0021 | |
| Types | Parameters |
|---|---|
| LED (China, Daheng company, GCI-060411) | — |
| Laser controller (Daheng company, GCI-0901) | — |
| Laser (USA, Lumentum company, S27-7402-360) | 360 mW (max) |
| collimator (China, Daheng company, GCX-LF18PC-980) | Focal length 11.2 mm |
| Lenses L1, L2 (China, Daheng company, GCL-010165) | Focal length 200 mm |
| Lenses L3, L4 (China, Daheng company, GCL-010167) | Focal length 400 mm |
| SLM (Germany, Holoeye company, PLUTO-2-NIR-011) | Resolution 1920 × 1080 |
| DM (China, Daheng company, GCC-101112) | 650–1000 nm/reflection |
| Objective (Daheng company, GCO-2116) | 60×, NA = 0.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Hu, G.; Zhao, S.; Li, H.; Zhang, F. Holographic Optical Tweezers That Use an Improved Gerchberg–Saxton Algorithm. Micromachines 2023, 14, 1014. https://doi.org/10.3390/mi14051014
Zhou Z, Hu G, Zhao S, Li H, Zhang F. Holographic Optical Tweezers That Use an Improved Gerchberg–Saxton Algorithm. Micromachines. 2023; 14(5):1014. https://doi.org/10.3390/mi14051014
Chicago/Turabian StyleZhou, Zhehai, Guoqing Hu, Shuang Zhao, Huiyu Li, and Fan Zhang. 2023. "Holographic Optical Tweezers That Use an Improved Gerchberg–Saxton Algorithm" Micromachines 14, no. 5: 1014. https://doi.org/10.3390/mi14051014