

Design of Wearable Finger Sensors for Rehabilitation Applications



Abstract
:1. Introduction
2. Materials and Methods
3. Results
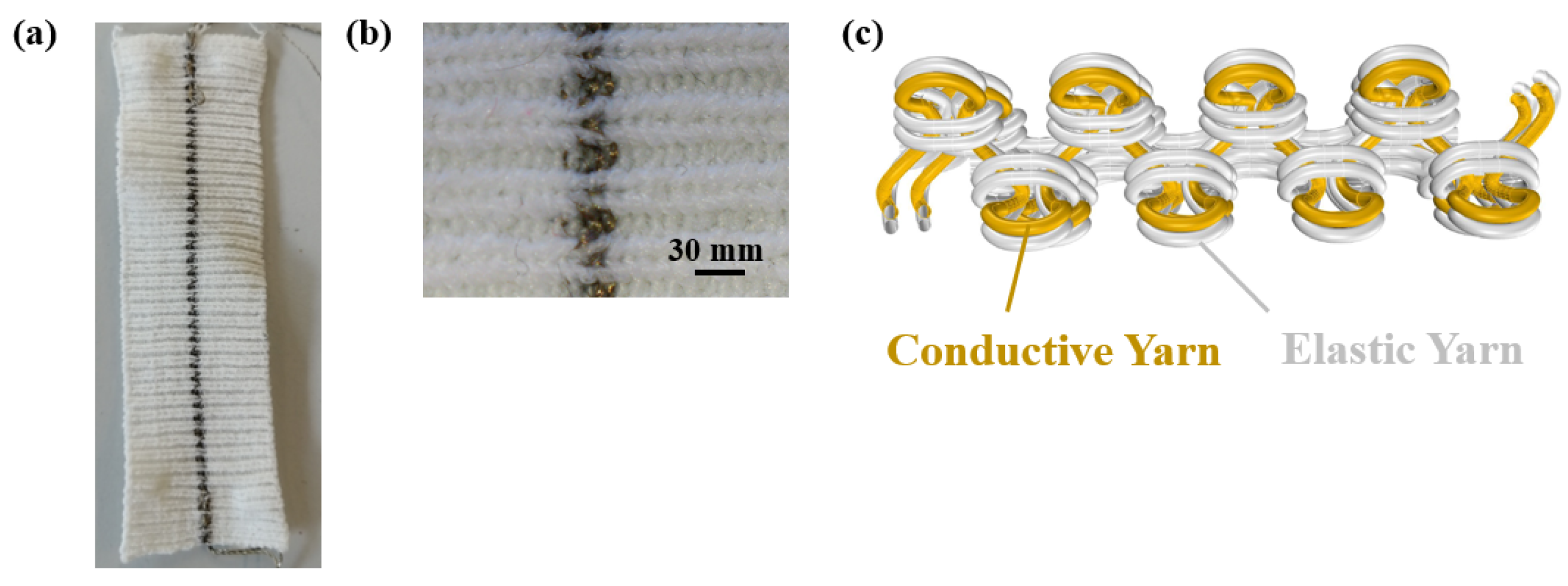
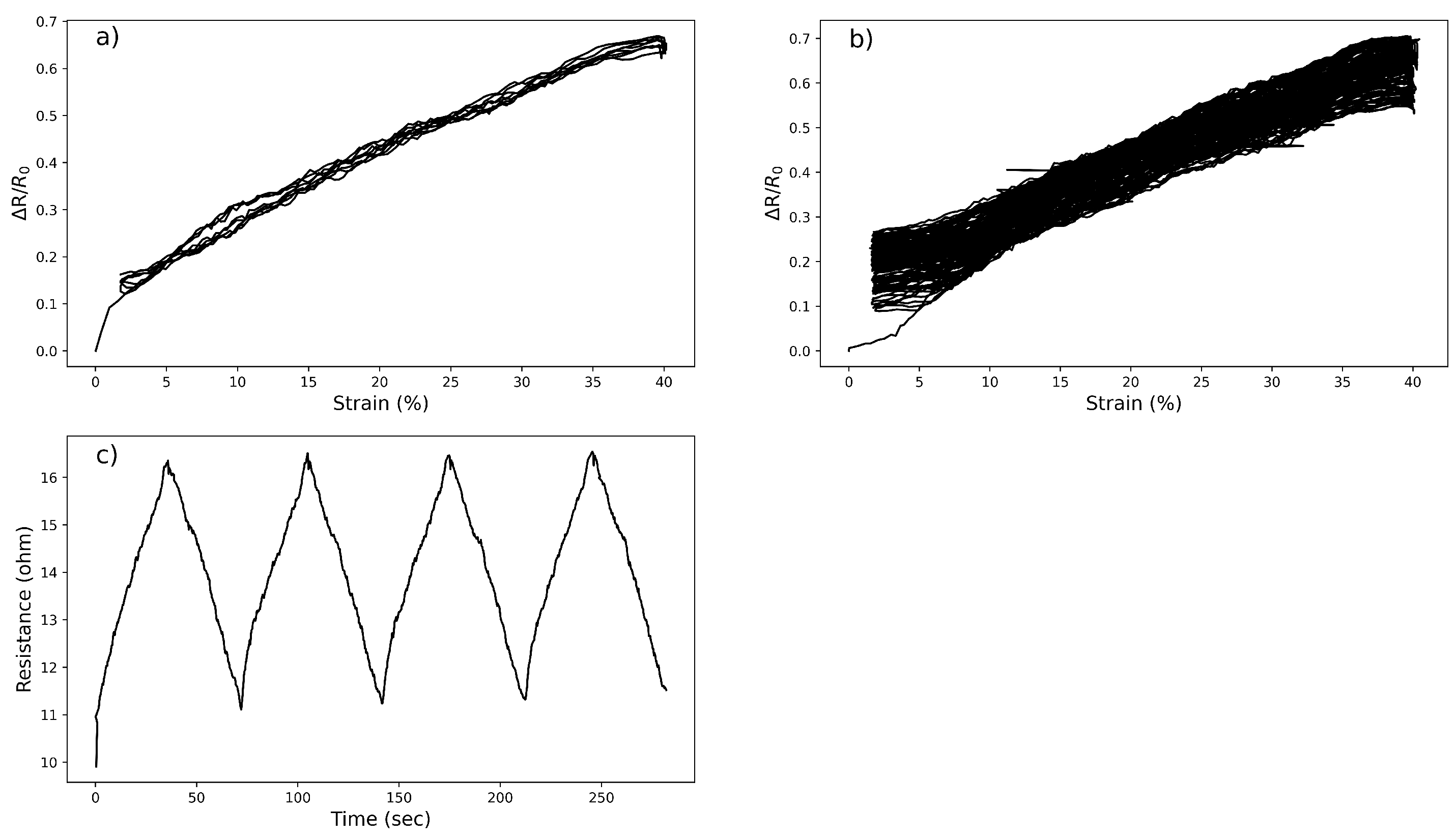
3.1. Electromechanical Performance of the Knitted Strain Sensor
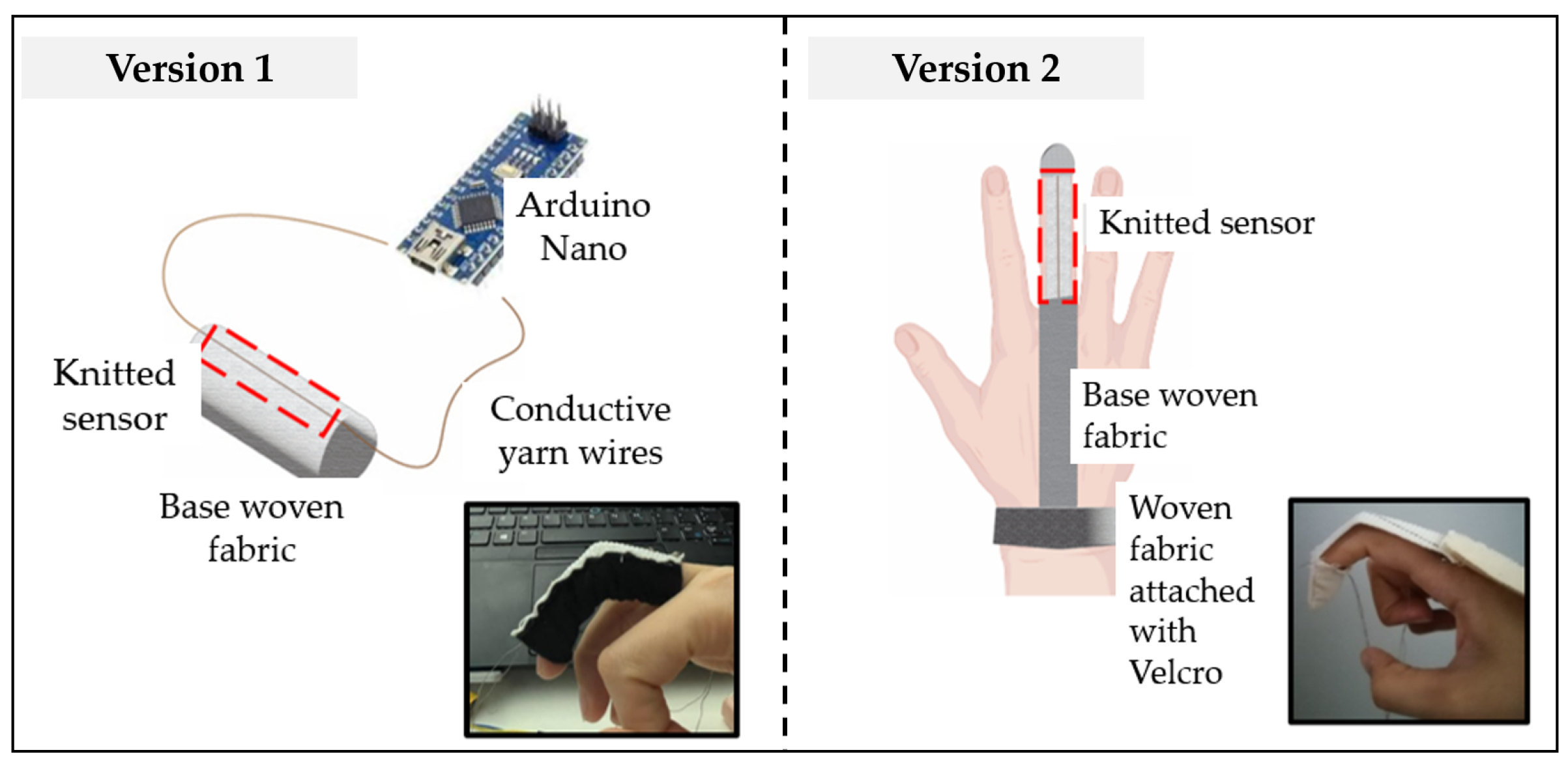
3.2. Application of Knitted Strain Sensor for Rehabilitation Purposes
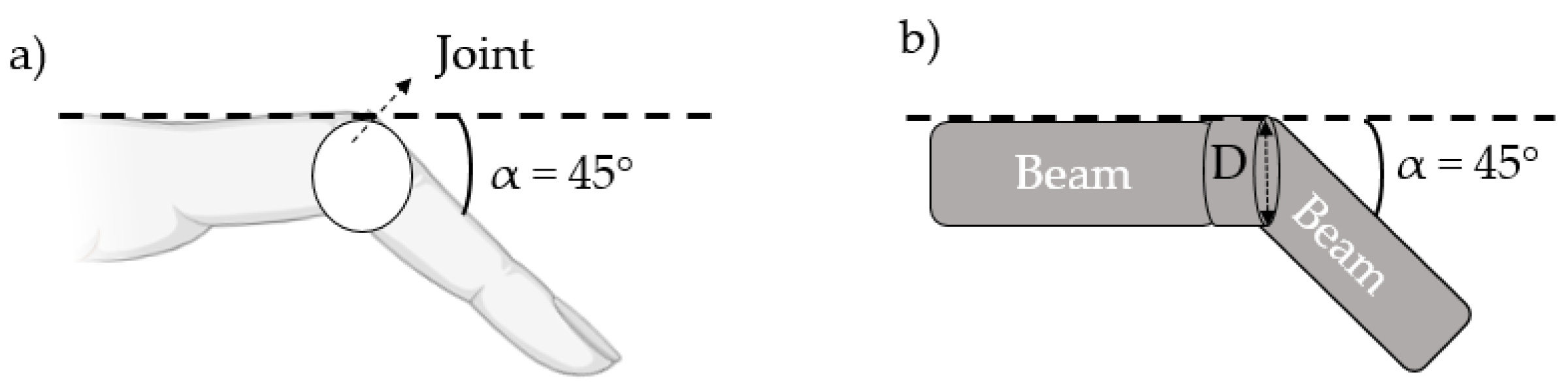
The Effect of Different Angles and Spacer Layer Thickness on Finger Movement of Demonstrator Performance
4. Discussion
5. Conclusions
- The index shows the highest resistance change with the lowest variations for different finger sensor versions. Based on this, all following tests were performed on the index finger.
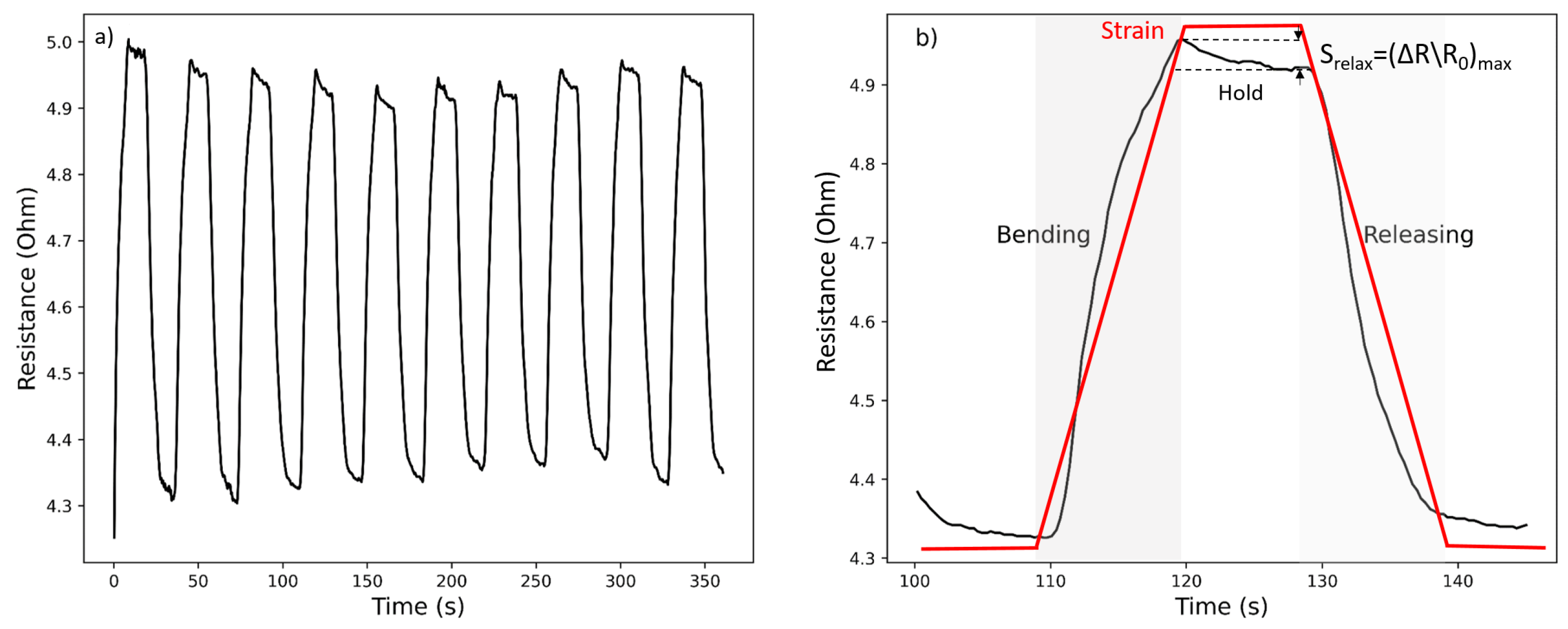
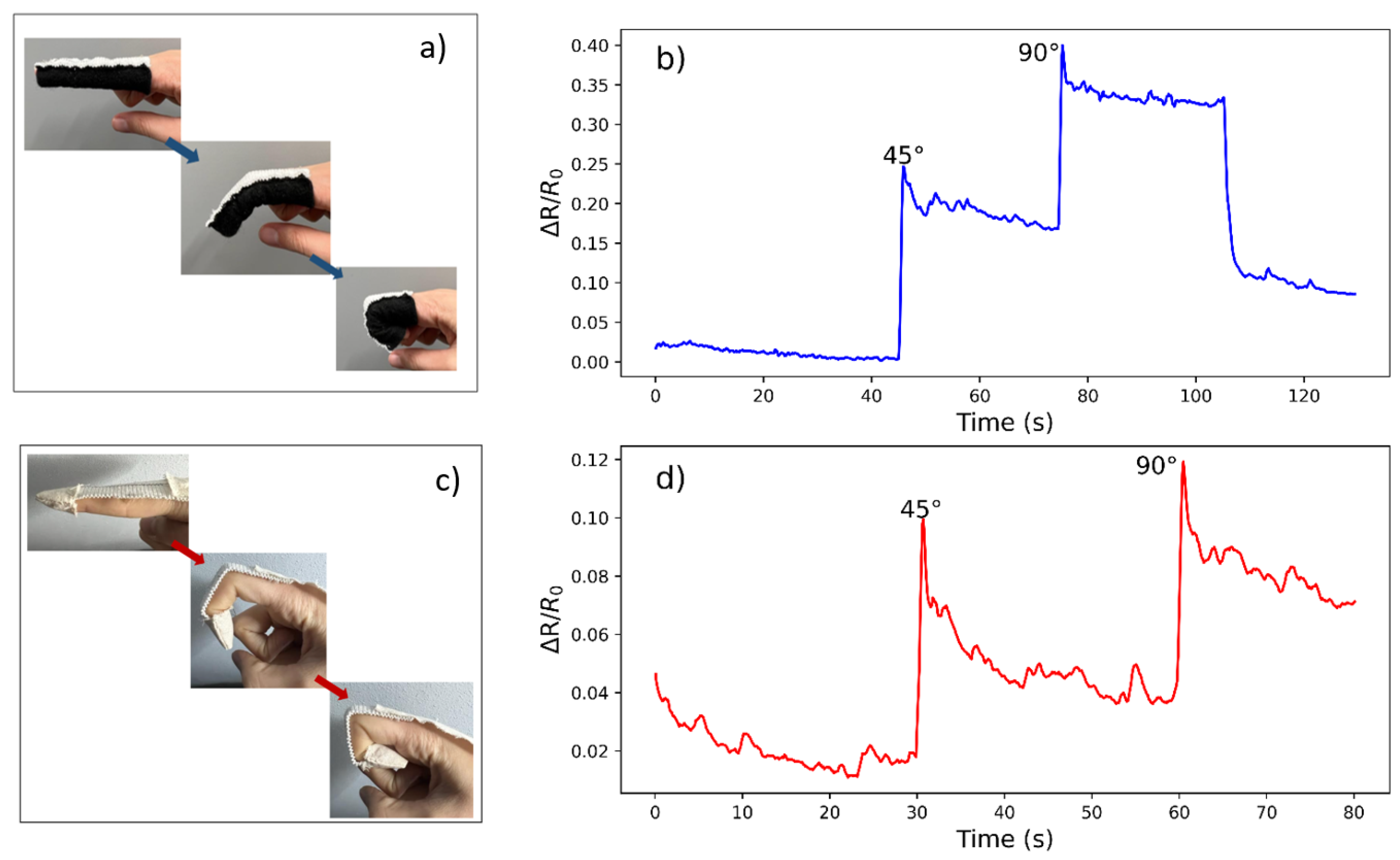
- The response of the sensor to the dynamic bending at positions of 45° and 90° is accurate for both demonstrators. However, the resistance change is higher in Version 1 in comparison to Version 2. For both versions, the peaks are followed by a gradual decrease during holding.
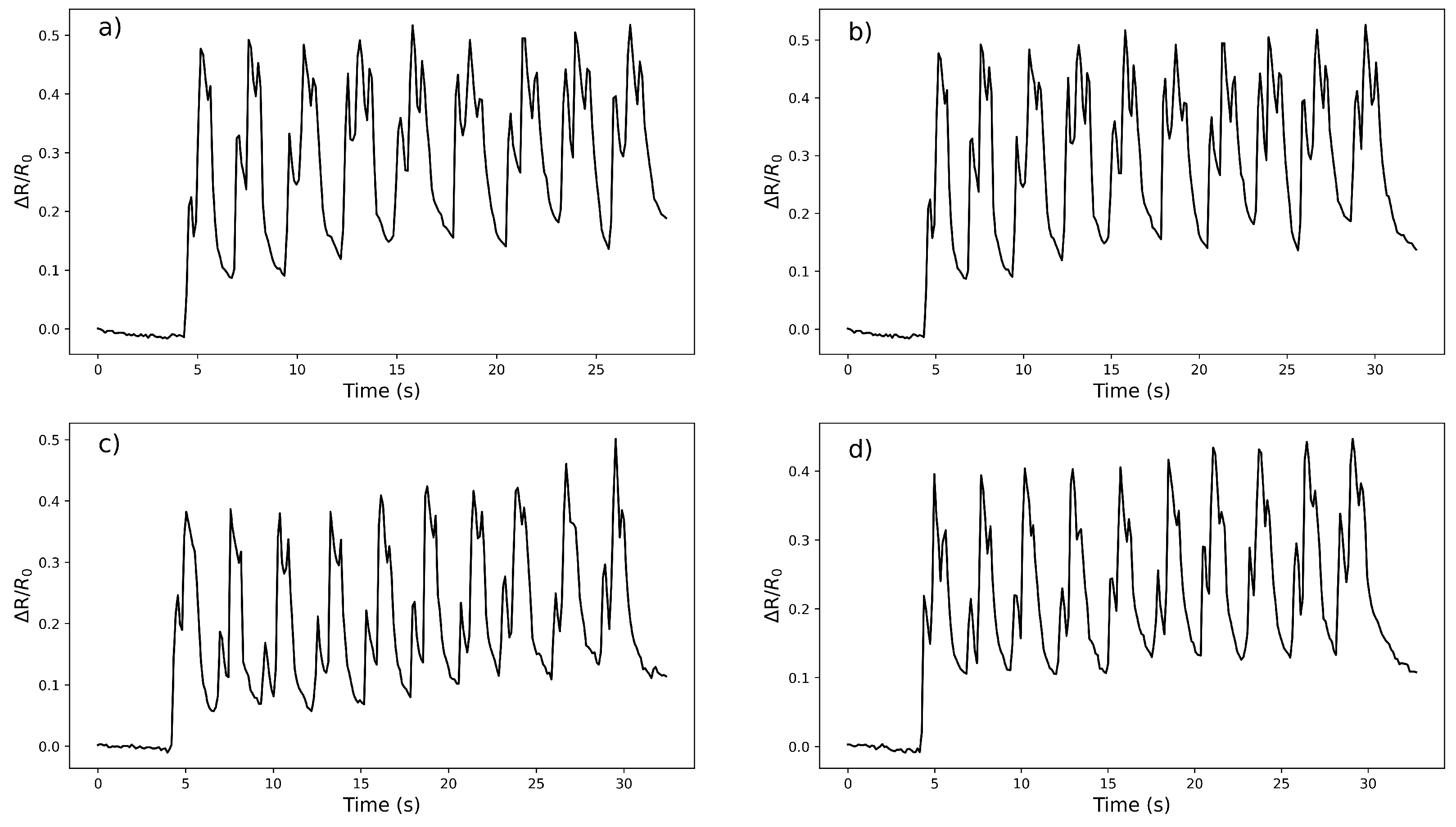
- As the number of spacer layers increases, the change in resistance tends to increase, while as the number of spacer layers increases, the change in resistance tends to decrease. This is because finger movement gradually decreases as the number of spacer layers increases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IMU | Inertial measurement unit |
| GF | Gauge factor |
| CV | Coefficients of variation |
References
- Zhang, L.; He, J.; Liao, Y.; Zeng, X.; Qiu, N.; Liang, Y.; Xiao, P.; Chen, T. A self-protective, reproducible textile sensor with high performance towards human-machine interactions. J. Mater. Chem. A 2019, 7, 26631–26640. [Google Scholar] [CrossRef]
- Li, B.; Xiao, G.; Liu, F.; Qiao, Y.; Li, C.M.; Lu, Z. A flexible humidity sensor based on silk fabrics for human respiration monitoring. J. Mater. Chem. C 2018, 6, 4549–4554. [Google Scholar] [CrossRef]
- Massaroni, C.; Di Tocco, J.; Presti, D.L.; Longo, U.G.; Miccinilli, S.; Sterzi, S.; Formica, D.; Saccomandi, P.; Schena, E. Smart textile based on piezoresistive sensing elements for respiratory monitoring. IEEE Sens. J. 2019, 19, 7718–7725. [Google Scholar] [CrossRef]
- Lin, B.S.; Lee, I.J.; Yang, S.Y.; Lo, Y.C.; Lee, J.; Chen, J.L. Design of an inertial-sensor-based data glove for hand function evaluation. Sensors 2018, 18, 1545. [Google Scholar] [CrossRef] [Green Version]
- Locher, I.; Sefar, A. Joining technologies for smart textiles. In Multidisciplinary Know-How for Smart-Textiles Developers; Woodhead Publishing: Cambridge, UK, 2013; pp. 285–305. [Google Scholar]
- Hatamie, A.; Angizi, S.; Kumar, S.; Pandey, C.M.; Simchi, A.; Willander, M.; Malhotra, B.D. Textile-based chemical and physical sensors for healthcare monitoring. J. Electrochem. Soc. 2020, 167, 037546. [Google Scholar] [CrossRef]
- Coyle, S.; Diamond, D. Medical applications of smart textiles. In Advances in Smart Medical Textiles; Elsevier: Amsterdam, The Netherlands, 2016; pp. 215–237. [Google Scholar]
- Reddy K, R.; Gandla, S.; Gupta, D. Highly sensitive, rugged, and wearable fabric strain sensor based on graphene clad polyester knitted elastic band for human motion monitoring. Adv. Mater. Interfaces 2019, 6, 1900409. [Google Scholar] [CrossRef]
- Tian, M.; Zhao, R.; Qu, L.; Chen, Z.; Chen, S.; Zhu, S.; Song, W.; Zhang, X.; Sun, Y.; Fu, R. Stretchable and designable textile pattern strain sensors based on graphene decorated conductive nylon filaments. Macromol. Mater. Eng. 2019, 304, 1900244. [Google Scholar] [CrossRef]
- Lee, H.; Glasper, M.J.; Li, X.; Nychka, J.A.; Batcheller, J.; Chung, H.J.; Chen, Y. Preparation of fabric strain sensor based on graphene for human motion monitoring. J. Mater. Sci. 2018, 53, 9026–9033. [Google Scholar] [CrossRef]
- Takamatsu, S.; Lonjaret, T.; Ismailova, E.; Masuda, A.; Itoh, T.; Malliaras, G.G. Wearable keyboard using conducting polymer electrodes on textiles. Adv. Mater. 2016, 28, 4485–4488. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly stretchable and sensitive strain sensor based on silver nanowire–elastomer nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef]
- Seyedin, S.; Razal, J.M.; Innis, P.C.; Jeiranikhameneh, A.; Beirne, S.; Wallace, G.G. Knitted strain sensor textiles of highly conductive all-polymeric fibers. ACS Appl. Mater. Interfaces 2015, 7, 21150–21158. [Google Scholar] [CrossRef] [PubMed]
- Lu, B.; Chen, Y.; Ou, D.; Chen, H.; Diao, L.; Zhang, W.; Zheng, J.; Ma, W.; Sun, L.; Feng, X. Ultra-flexible piezoelectric devices integrated with heart to harvest the biomechanical energy. Sci. Rep. 2015, 5, 16065. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Atalay, O.; Kennon, W.R. Knitted strain sensors: Impact of design parameters on sensing properties. Sensors 2014, 14, 4712–4730. [Google Scholar] [CrossRef] [PubMed]
- Ryu, H.; Park, S.; Park, J.J.; Bae, J. A knitted glove sensing system with compression strain for finger movements. Smart Mater. Struct. 2018, 27, 055016. [Google Scholar] [CrossRef]
- Han, X.; Miao, X.; Liu, Q.; Li, Y.; Wan, A. A Fabric-Based Integrated Sensor Glove System Recognizing Hand Gesture. Autex Res. J. 2021. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y.; Sung, M.; Bae, J.; Choi, Y. A knitted sensing glove for human hand postures pattern recognition. Sensors 2021, 21, 1364. [Google Scholar] [CrossRef]
- Isaia, C.; McMaster, S.A.; McNally, D. Study of performance of knitted conductive sleeves as wearable textile strain sensors for joint motion tracking. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 4555–4558. [Google Scholar]
- Jansen, K.M. Performance evaluation of knitted and stitched textile strain sensors. Sensors 2020, 20, 7236. [Google Scholar] [CrossRef]
- Bozali, B.; Ghodrat, S.; Plaude, L.; van Dam, J.J.; Jansen, K.M. Development of Low Hysteresis, Linear Weft-Knitted Strain Sensors for Smart Textile Applications. Sensors 2022, 22, 7688. [Google Scholar] [CrossRef]
- Lu, S.; Chen, D.; Liu, C.; Jiang, Y.; Wang, M. A 3-D finger motion measurement system via soft strain sensors for hand rehabilitation. Sens. Actuators A Phys. 2019, 285, 700–711. [Google Scholar] [CrossRef]
- Kinovea. Kinovea User Manual. 2023. Available online: https://www.kinovea.org/help.html (accessed on 13 December 2022).
- Huang, F.; Hu, J.; Yan, X.; Meng, F. High-linearity, ultralow-detection-limit, and rapid-response strain sensing yarn for data gloves. J. Ind. Text. 2022, 51, 4554S–4570S. [Google Scholar] [CrossRef]
- Li, Y.; Miao, X.; Chen, J.Y.; Jiang, G.; Liu, Q. Sensing performance of knitted strain sensor on two-dimensional and three-dimensional surfaces. Mater. Des. 2021, 197, 109273. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design | Advantages | Disadvantages |
|---|---|---|
| Version 1 | Better coverage to finger | Possibility of slackness after use |
| Version 2 | Easily adjustable to hand size | Discomfort caused by not fully covering the finger |
| Finger | Version 1 | Version 2 | ||||
|---|---|---|---|---|---|---|
| Mean | SD | CV (%) | Mean | SD | CV (%) | |
| Thumb | 0.30 | 0.01 | 0.05 | 0.44 | 0.07 | 16 |
| Index | 0.31 | 0.02 | 0.06 | 0.53 | 0.05 | 9 |
| Middle | 0.21 | 0.04 | 0.18 | 0.42 | 0.06 | 14 |
| Ring | 0.25 | 0.04 | 0.17 | 0.42 | 0.07 | 17 |
| Angle | Spacer Layer Number | ΔR/R0 | |
|---|---|---|---|
| 45 | 0 | 0.39 | 0.18 ± 0.01 |
| 45 | 1 | 0.49 | 0.28 ± 0.02 |
| 45 | 2 | 0.59 | 0.41 ± 0.02 |
| 45 | 4 | 0.80 | 0.19 ± 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bozali, B.; Ghodrat, S.; Jansen, K.M.B. Design of Wearable Finger Sensors for Rehabilitation Applications. Micromachines 2023, 14, 710. https://doi.org/10.3390/mi14040710
Bozali B, Ghodrat S, Jansen KMB. Design of Wearable Finger Sensors for Rehabilitation Applications. Micromachines. 2023; 14(4):710. https://doi.org/10.3390/mi14040710
Chicago/Turabian StyleBozali, Beyza, Sepideh Ghodrat, and Kaspar M. B. Jansen. 2023. "Design of Wearable Finger Sensors for Rehabilitation Applications" Micromachines 14, no. 4: 710. https://doi.org/10.3390/mi14040710