
Aluminum Nitride Out-of-Plane Piezoelectric MEMS Actuators

Abstract
:1. Introduction
2. Materials and Methods
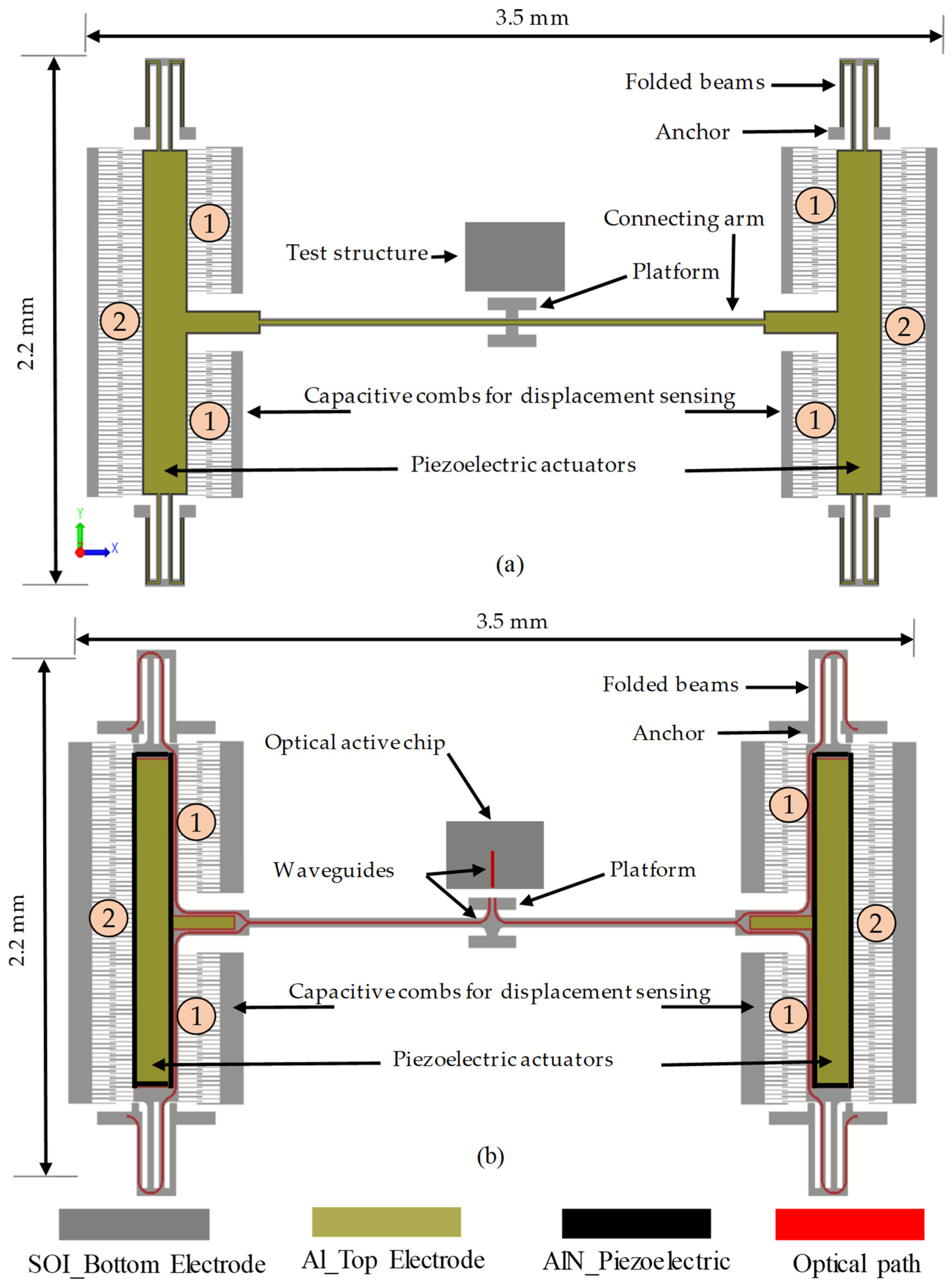
2.1. Operating Principle and Schematic of the Actuator
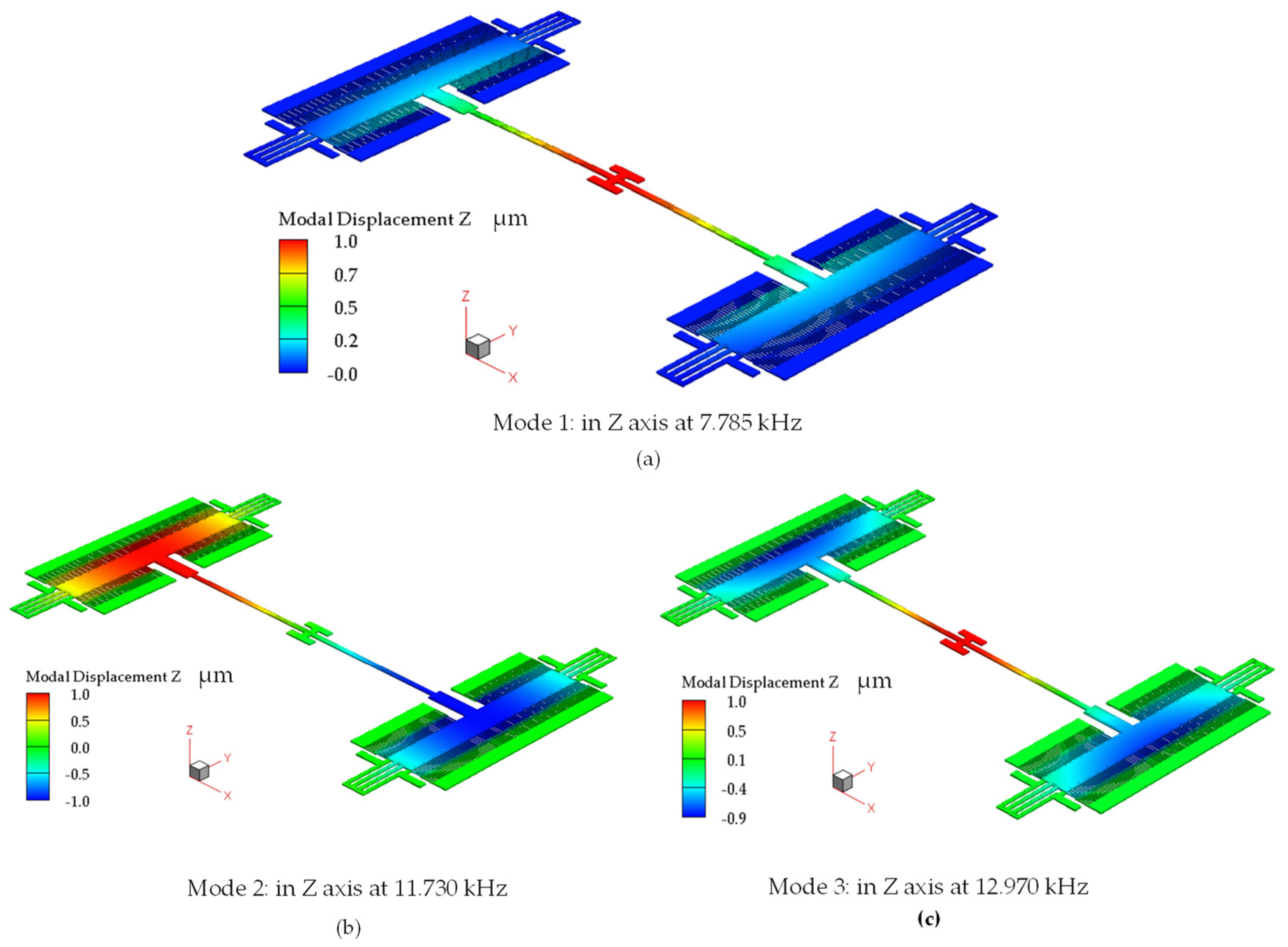
2.2. Design and Finite Element Analysis Simulations
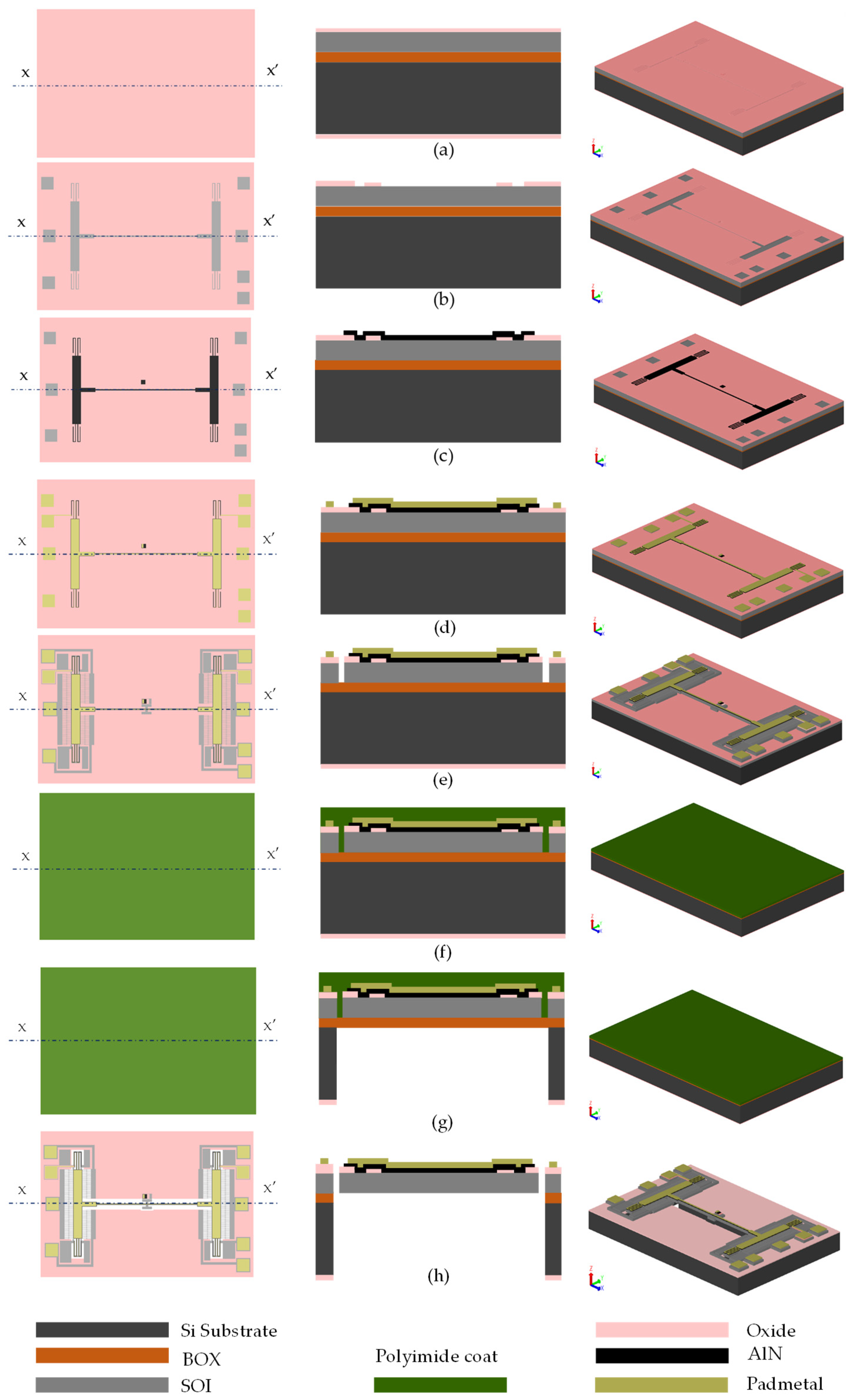
2.3. Fabrication Process
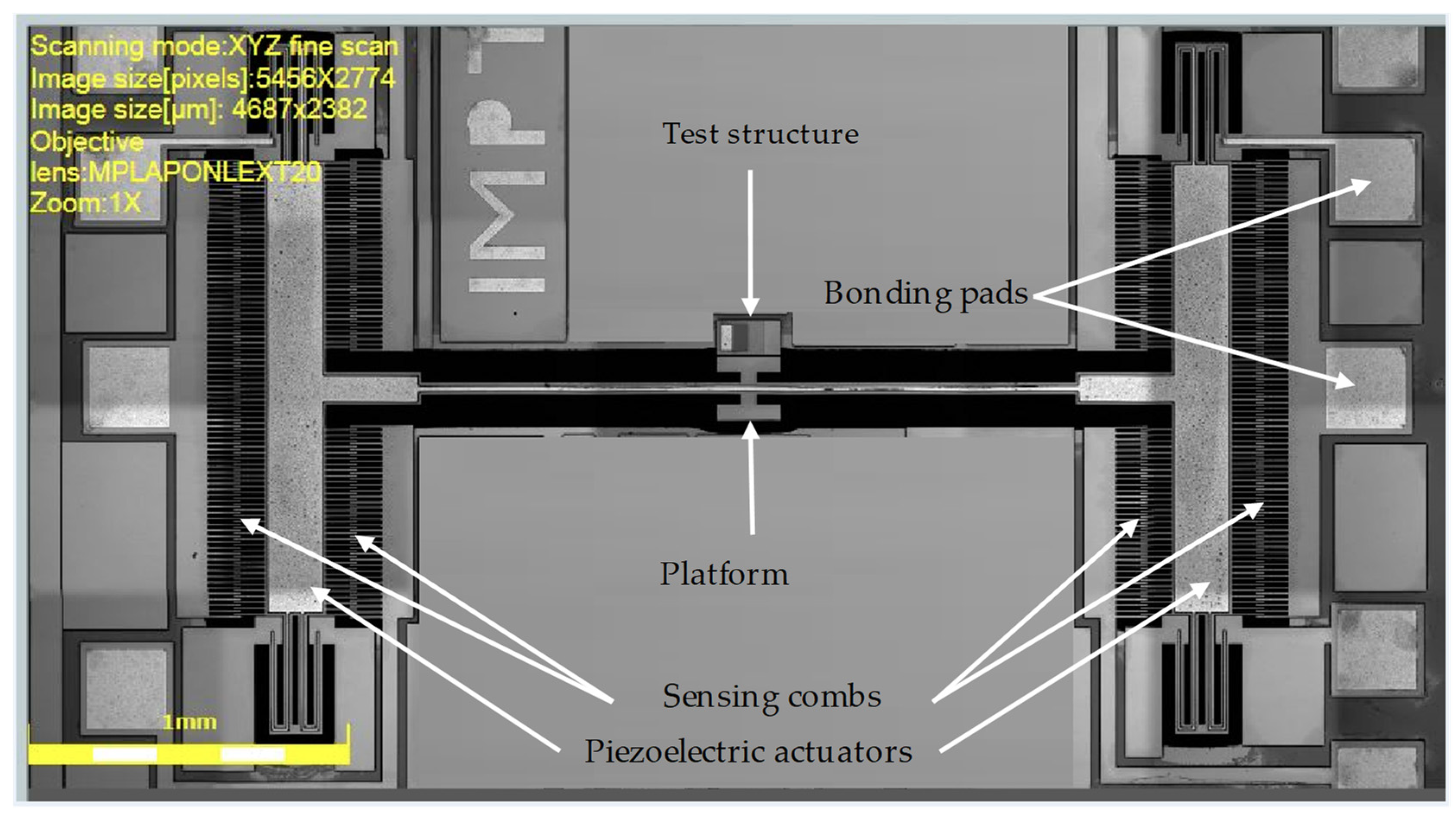
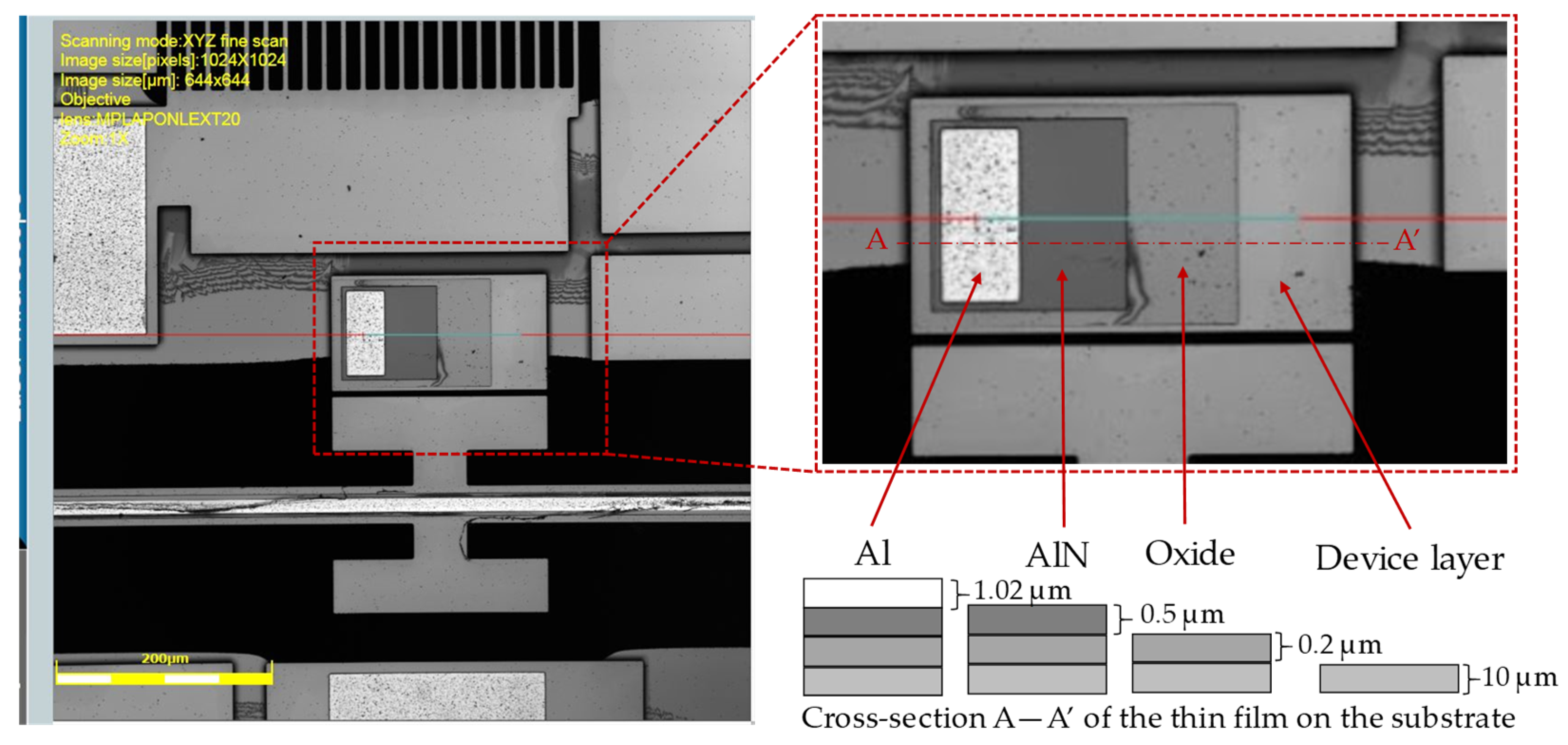
2.4. Procedures for Experimental Testing
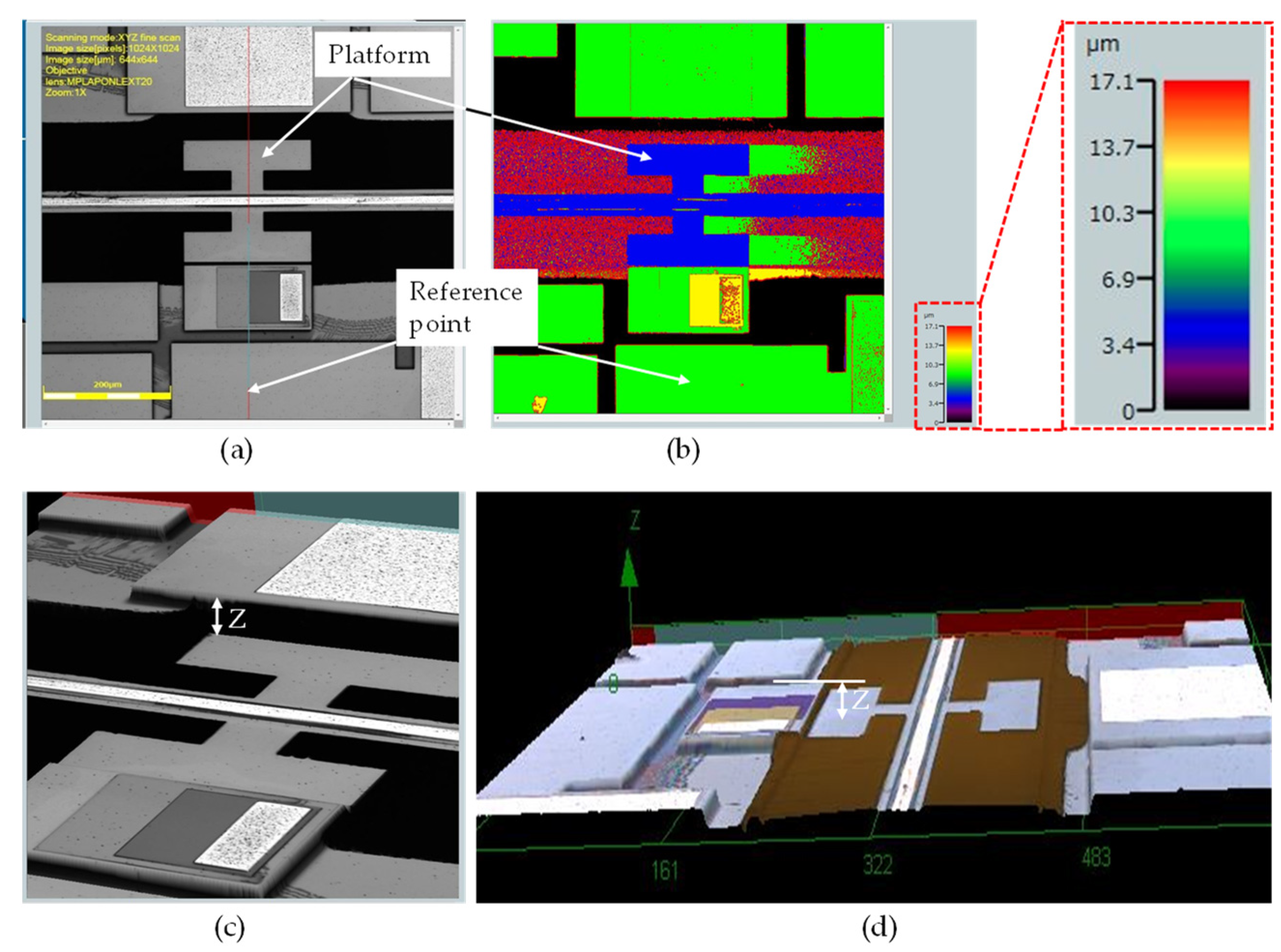
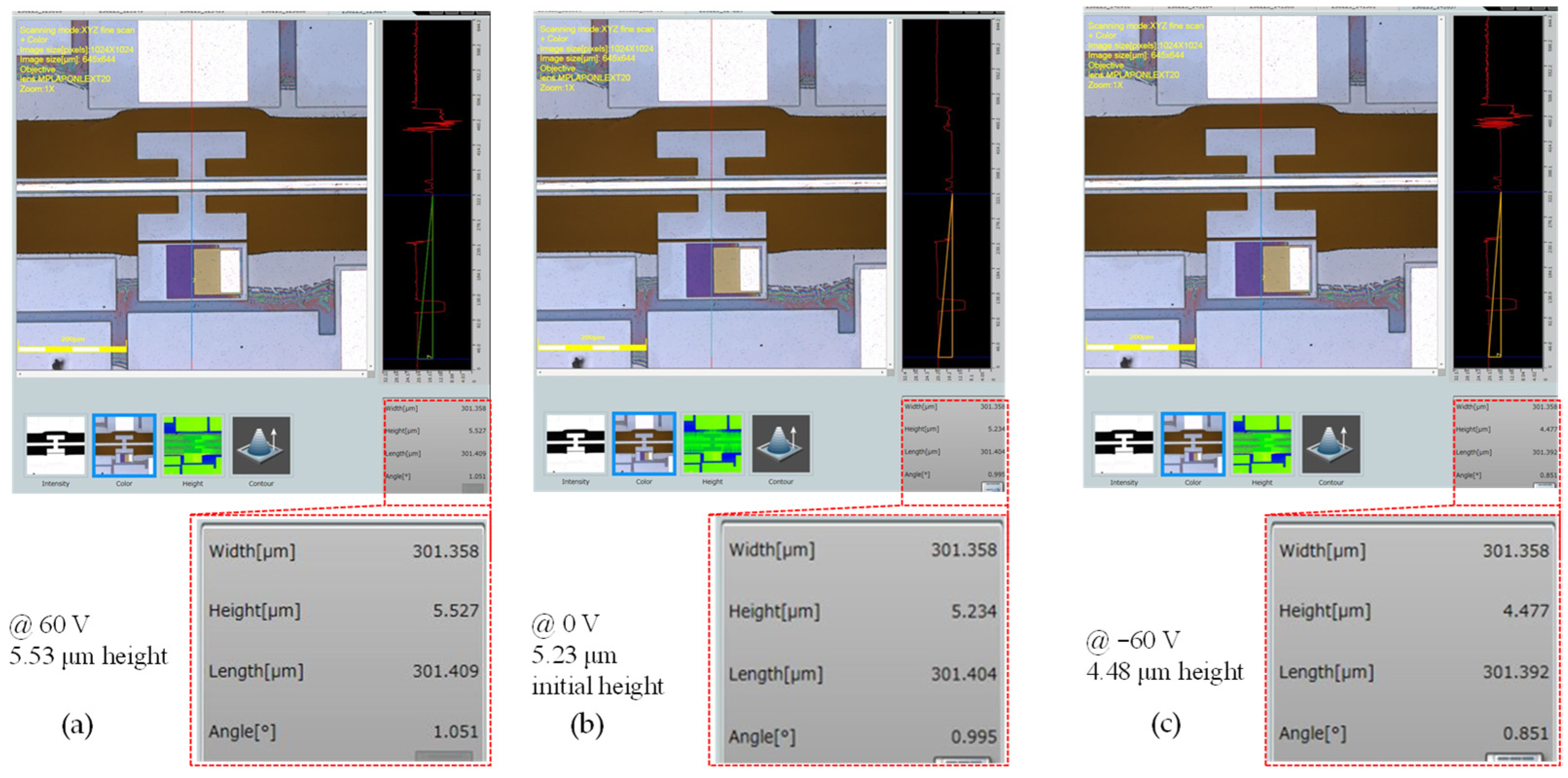
2.4.1. Static Characterization
2.4.2. Procedure for the Characterization of the Frequency Response
3. Results
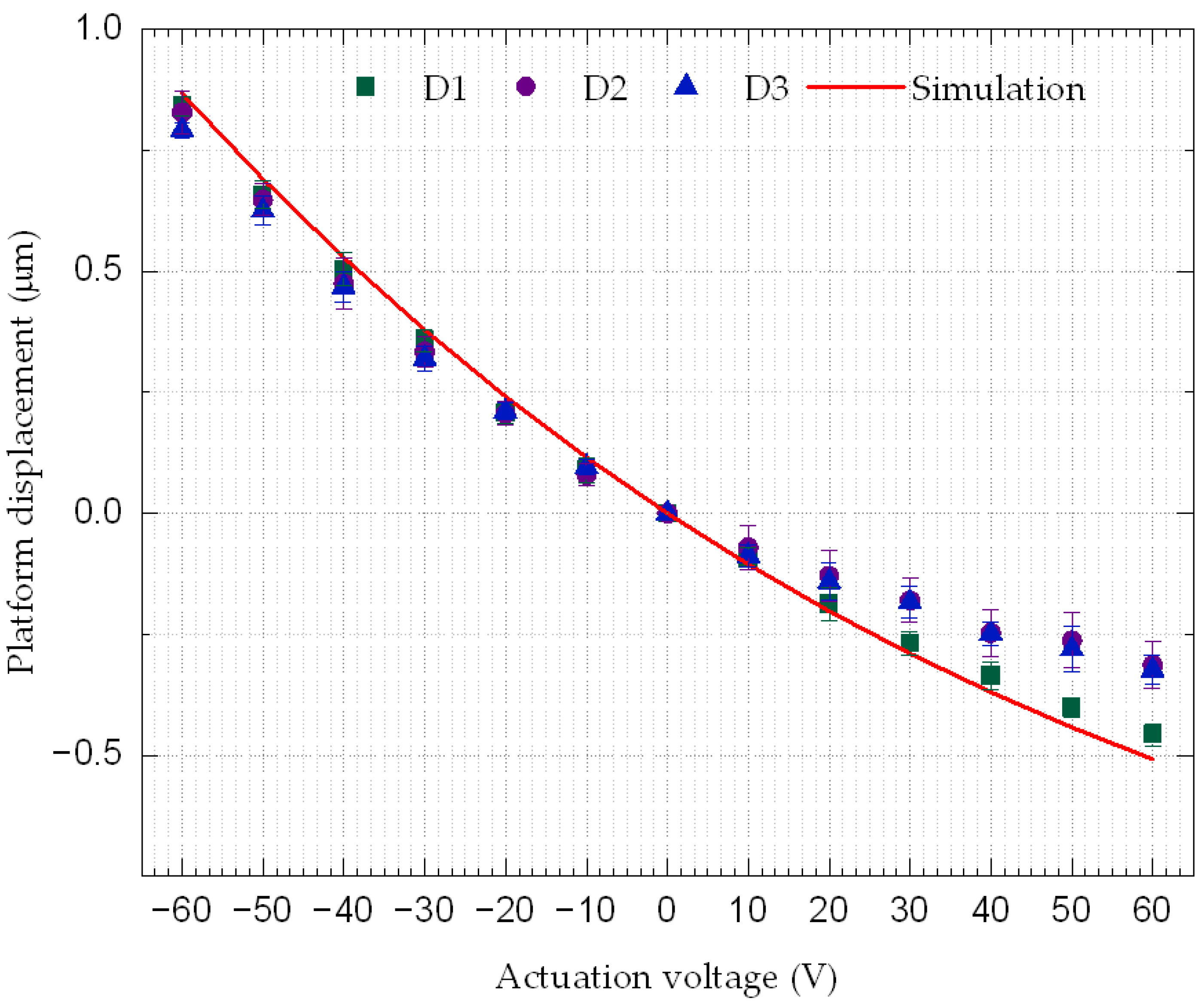
3.1. Static Characterization
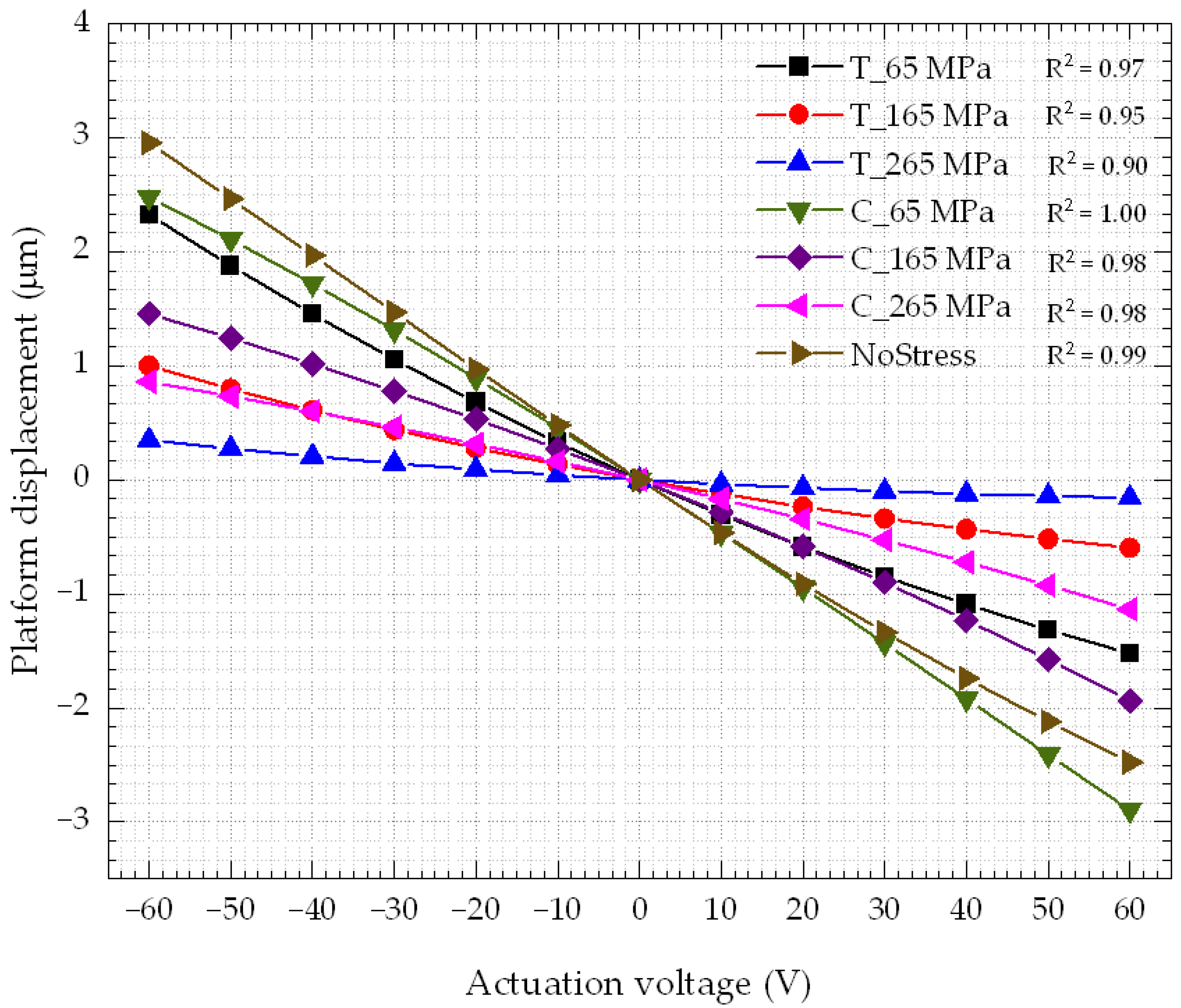
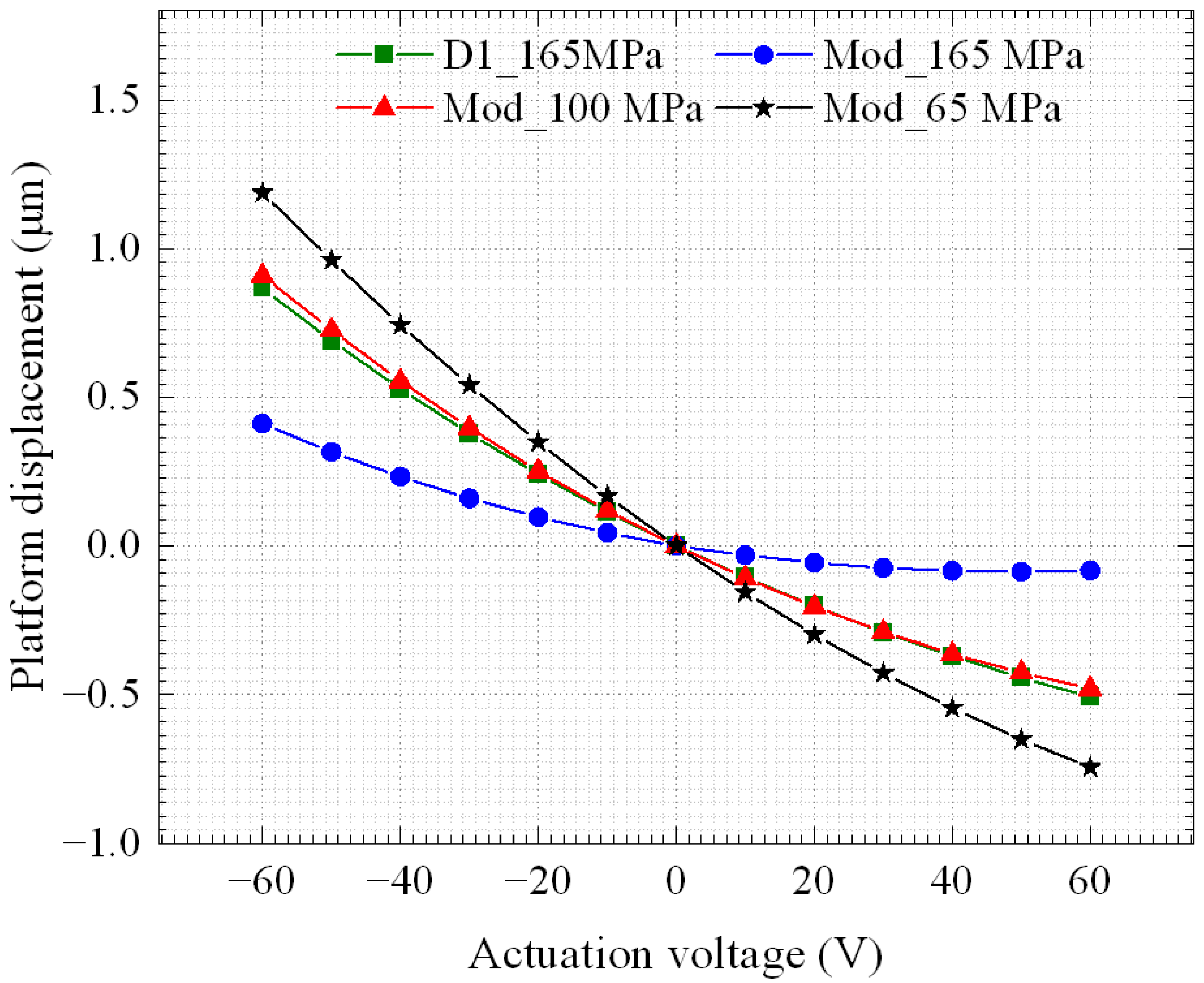
3.1.1. DC Displacement
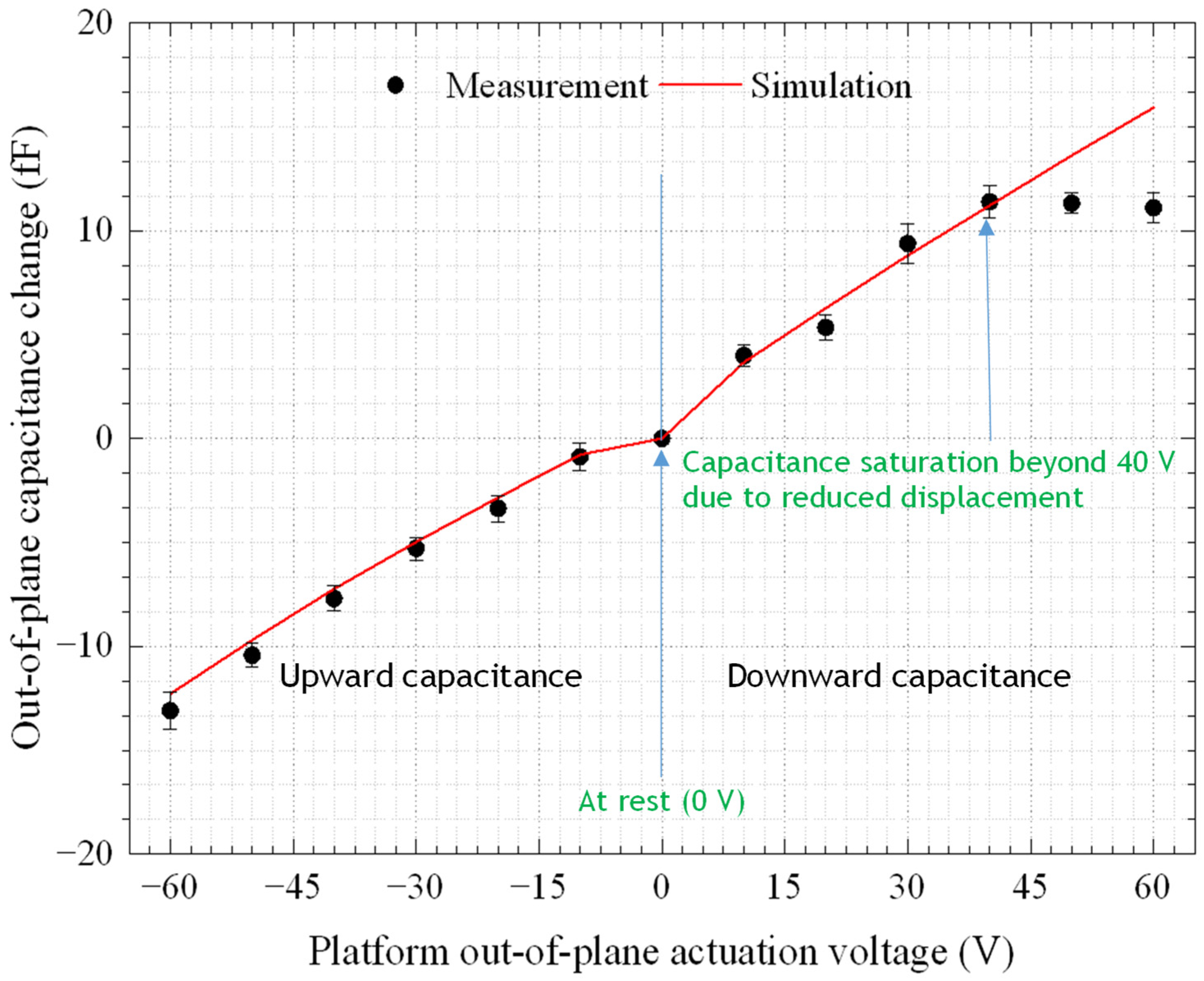
3.1.2. DC Capacitance
3.2. Mechanical Frequency Response
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Septon, T.; Becker, A.; Gosh, S.; Shtendel, G.; Sichkovskyi, V.; Schnabel, F.; Sengül, A.; Bjelica, M.; Witzigmann, B.; Reithmaier, J.P.; et al. Large linewidth reduction in semiconductor lasers based on atom-like gain material. Optica 2019, 6, 1071–1077. [Google Scholar] [CrossRef]
- Rahim, M.; Zeb, K.; Lu, Z.; Pakulski, G.; Liu, J.; Poole, P.; Song, C.; Barrios, P.; Jiang, W.; Zhang, X. Monolithic InAs/InP quantum dash dual-wavelength DFB laser with ultra-low noise common cavity modes for millimeter-wave applications. Opt. Express 2019, 27, 35368–35375. [Google Scholar] [CrossRef]
- Matsui, Y.; Schatz, R.; Che, D.; Khan, F.; Kwakernaak, M.; Sudo, T. Low-chirp isolator-free 65-GHz-bandwidth directly modulated lasers. Nat. Photonics 2021, 15, 59–63. [Google Scholar] [CrossRef]
- Zhang, L.; La, X.; Zhu, X.; Guo, J.; Zhao, L.; Wang, W.; Liang, S. High Speed Waveguide Uni-Traveling Carrier InGaAs/InP Photodiodes Fabricated By Zn Diffusion Doping. IEEE J. Sel. Top. Quantum Electron. 2022, 28, 3800206. [Google Scholar] [CrossRef]
- Nada, M.; Nakajima, F.; Tatsumi, S.; Yamada, Y.; Nakanishi, Y.; Yoshimatsu, T.; Sano, K.; Matsuzaki, H. Inverted p-down pin photodiode exceeding 70-GHz bandwidth featuring low operating bias voltage of 2 V. In Proceedings of the 2020 European Conference on Optical Communications (ECOC), Virtual Event, Belgium, 6–10 December 2020; pp. 1–4. [Google Scholar]
- Zhang, M.; Wang, C.; Kharel, P.; Zhu, D.; Lončar, M. Integrated lithium niobate electro-optic modulators: When performance meets scalability. Optica 2021, 8, 652–667. [Google Scholar] [CrossRef]
- Han, Q.; Menard, M.; Shi, W. Superlattice Arrayed Waveguide Grating in Silicon Nitride. IEEE Photonics Technol. Lett. 2020, 32, 1411–1414. [Google Scholar] [CrossRef]
- Han, Q.; St-Yves, J.; Chen, Y.; Ménard, M.; Shi, W. Polarization-insensitive silicon nitride arrayed waveguide grating. Opt. Lett. 2019, 44, 3976–3979. [Google Scholar] [CrossRef]
- Boroojerdi, M.T.; Ménard, M.; Kirk, A.G. Two-period contra-directional grating assisted coupler. Opt. Express 2016, 24, 22865–22874. [Google Scholar] [CrossRef]
- Nair, D.; Menard, M. A Compact Low-Loss Broadband Polarization Independent Silicon 50/50 Splitter. IEEE Photonics J. 2021, 13, 6600207. [Google Scholar] [CrossRef]
- Boroojerdi, M.T.; Ménard, M.; Kirk, A.G. Wavelength tunable integrated add-drop filter with 10.6 nm bandwidth adjustability. Opt. Express 2016, 24, 22043–22050. [Google Scholar] [CrossRef]
- Nezami, M.S.; Radi, B.; Gour, A.; Xiong, Y.; Taherzadeh-Sani, M.; Ménard, M.; Nabki, F.; Liboiron-Ladouceur, O. Integrated RF Passive Low-Pass Filters in Silicon Photonics. IEEE Photonics Technol. Lett. 2018, 30, 2052–2055. [Google Scholar] [CrossRef]
- Jin, W.; Yang, Q.-F.; Chang, L.; Shen, B.; Wang, H.; Leal, M.A.; Wu, L.; Gao, M.; Feshali, A.; Paniccia, M.; et al. Hertz-linewidth semiconductor lasers using CMOS-ready ultra-high-Q microresonators. Nat. Photonics 2021, 15, 346–353. [Google Scholar] [CrossRef]
- Chollet, F. Devices Based on Co-Integrated MEMS Actuators and Optical Waveguide: A Review. Micromachines 2016, 7, 18. [Google Scholar] [CrossRef]
- Fitsios, D.; Alexoudi, T.; Kanellos, G.T.; Vyrsokinos, K.; Pleros, N.; Tekin, T.; Cherchi, M.; Ylinen, S.; Harjanne, M.; Kapulainen, M.; et al. Dual SOA-MZI Wavelength Converters Based on III-V Hybrid Integration on a μm-Scale Si Platform. IEEE Photonics Technol. Lett. 2014, 26, 560–563. [Google Scholar] [CrossRef]
- Budd, R.A.; Schares, L.; Lee, B.G.; Doany, F.E.; Baks, C.; Kuchta, D.M.; Schow, C.L.; Libsch, F. Semiconductor optical amplifier (SOA) packaging for scalable and gain-integrated silicon photonic switching platforms. In Proceedings of the 2015 IEEE 65th Electronic Components and Technology Conference (ECTC), San Diego, CA, USA, 26–29 May 2015; pp. 1280–1286. [Google Scholar]
- Doany, F.E.; Budd, R.; Schares, L.; Huynh, T.; Wood, M.; Kuchta, D.; Dupuis, N.; Schow, C.; Lee, B.; Moehrle, M.; et al. A Four-Channel Silicon Photonic Carrier with Flip-Chip Integrated Semiconductor Optical Amplifier (SOA) Array Providing >10-dB Gain. In Proceedings of the 2016 IEEE 66th Electronic Components and Technology Conference (ECTC), Las Vegas, NV, USA, 31 May–3 June 2016; pp. 1061–1068. [Google Scholar]
- Matsumoto, T.; Kurahashi, T.; Konoike, R.; Suzuki, K.; Tanizawa, K.; Uetake, A.; Takabayashi, K.; Ikeda, K.; Kawashima, H.; Akiyama, S.; et al. Hybrid-Integration of SOA on Silicon Photonics Platform Based on Flip-Chip Bonding. J. Light. Technol. 2019, 37, 307–313. [Google Scholar] [CrossRef]
- Barwicz, T.; Lichoulas, T.W.; Taira, Y.; Martin, Y.; Takenobu, S.; Janta-Polczynski, A.; Numata, H.; Kimbrell, E.L.; Nah, J.-W.; Peng, B.; et al. Automated, high-throughput photonic packaging. Opt. Fiber Technol. 2018, 44, 24–35. [Google Scholar] [CrossRef]
- Wu, K.; Tichem, M. Post-Release Deformation and Motion Control of Photonic Waveguide Beams by Tuneable Electrothermal Actuators in Thick SiO2. Micromachines 2018, 9, 496. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; Kohli, N.; Brière, J.; Ménard, M.; Nabki, F. Translational MEMS Platform for Planar Optical Switching Fabrics. Micromachines 2019, 10, 435. [Google Scholar] [CrossRef] [Green Version]
- Uhlig, S.; Gaudet, M.; Langa, S.; Schimmanz, K.; Conrad, H.; Kaiser, B.; Schenk, H. Electrostatically Driven In-Plane Silicon Micropump for Modular Configuration. Micromachines 2018, 9, 190. [Google Scholar] [CrossRef] [Green Version]
- Hussein, H.; Fariborzi, H.; Younis, M.I. Modeling of Beam Electrothermal Actuators. J. Microelectromech. Syst. 2020, 29, 1570–1581. [Google Scholar] [CrossRef]
- Si, G.; Ding, M.; Zhang, Z.; Zhang, X. Design and Simulation of A Novel Three-Dimensional Multi-Degree-of-Freedom Electrothermal Microgripper. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 13–16 October 2020; pp. 659–664. [Google Scholar]
- Zhang, M.; Yang, J.; Si, C.; Han, G.; Zhao, Y.; Ning, J. Research on the Piezoelectric Properties of AlN Thin Films for MEMS Applications. Micromachines 2015, 6, 1236–1248. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, L.; Xie, H. A large range micro-XZ-stage with monolithic integration of electrothermal bimorph actuators and electrostatic comb drives. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 71–74. [Google Scholar]
- Bahgat, A.S.; Zaki, A.H.; Mohamed, M.A.; Sherif, A.F.E. Design and simulation of MEMS-actuated adjustable optical wedge for laser beam scanners. J. Micro/Nanolithograp. MEMS MOEMS 2018, 17, 8. [Google Scholar] [CrossRef]
- He, S.; Ben Mrad, R.; Chong, J. Repulsive-force out-of-plane large stroke translation micro electrostatic actuator. J. Micromech. Microeng. 2011, 21, 075002. [Google Scholar] [CrossRef]
- Kim, M.; Park, J.-H.; Jeon, J.-A.; Yoo, B.-W.; Park, I.; Kim, Y.-K. High fill-factor micromirror array using a self-aligned vertical comb drive actuator with two rotational axes. J. Micromech. Microeng. 2009, 19, 035014. [Google Scholar] [CrossRef]
- Manh, C.H.; Hane, K. Vacuum operation of comb-drive micro display mirrors. J. Micromech. Microeng. 2009, 19, 105018. [Google Scholar] [CrossRef]
- Fan, Y.; Cui, C.; Yu, H.; Shen, W.; Wang, Z.; Li, J. An electrostatic vertical comb-drive micromirror with self-aligned assembly. In Proceedings of the 2017 IEEE 12th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Los Angeles, CA, USA, 9–12 April 2017; pp. 268–272. [Google Scholar]
- Chollet, F.; Liu, H. A (Not So) Short Introduction to MEMS. Available online: http://memscyclopedia.org/introMEMS.html (accessed on 30 March 2018).
- Piyawattanametha, W.; Qiu, Z. Optical MEMS. In Microelectromechanical Systems and Devices; Islam, N., Ed.; IntechOpen: London, UK, 2012. [Google Scholar] [CrossRef] [Green Version]
- Sandhu, G.; Meade, R.; Bi, L.; Smythe, J. Apparatus providing simplified alignment of optical fiber in photonic integrated circuits. US20140185983A1, 2 January 2013. [Google Scholar]
- Premkumar, S.; Shinde, S.D.; Kumar, H.; Kharat, D.K. Characterization of PZT Multi-Layer Actuator. In Proceedings of the 2012 1st International Symposium on Physics and Technology of Sensors, Pune, India, 7–10 March 2012; IEEE: Pune, India, 2012; pp. 67–69. [Google Scholar] [CrossRef]
- Qiu, Z.; Pulskamp, J.S.; Lin, X.; Rhee, C.-H.; Wang, T.; Polcawich, R.G.; Oldham, K. Large displacement vertical translational actuator based on piezoelectric thin films. J. Micromech. Microeng. 2010, 20, 075016. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Livermore, C. A high-force, out-of-plane actuator with a MEMS-enabled microscissor motion amplifier. J. Phys. Conf. Ser. 2015, 660, 012026. [Google Scholar] [CrossRef]
- Michael, A.; Chen, S.S.; Kwok, C.Y. Feedback Driven Fast Piezoelectric Micro-lens Actuator. Procedia Eng. 2016, 168, 1492–1495. [Google Scholar] [CrossRef]
- Qiu, Z.; Liu, Z.; Duan, X.; Khondee, S.; Joshi, B.; Mandella, M.J.; Oldham, K.; Kurabayashi, K.; Wang, T.D. Targeted vertical cross-sectional imaging with handheld near-infrared dual axes confocal fluorescence endomicroscope. Biomed. Opt. Express 2013, 4, 322–330. [Google Scholar] [CrossRef] [Green Version]
- Rezaei, M.; Lueke, J.; Raboud, D.; Moussa, W. Challenges in fabrication and testing of piezoelectric MEMS with a particular focus on energy harvesters. Microsyst. Technol. 2013, 19, 1195–1219. [Google Scholar] [CrossRef]
- Damjanovic, D. Lead-Based Piezoelectric Materials. In Piezoelectric and Acoustic Materials for Transducer Applications; Safari, A., Akdogan, E.K., Eds.; Springer: Boston, MA, USA, 2008. [Google Scholar]
- Mastronardi, V.M. Piezoelectric Transducers Based on Aluminum Nitride and Polyimide for Tactile Applications. Ph.D. Thesis, Politecnico di Torino, Turin, Italy, 2016. [Google Scholar]
- Gablech, I.; Klempa, J.; Pekárek, J.; Vyroubal, P.; Hrabina, J.; Holá, M.; Kunz, J.; Brodský, J.; Neužil, P. Simple and Efficient AlN-Based Piezoelectric Energy Harvesters. Micromachines 2020, 11, 143. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Segovia-Fernandez, J.; Sonmezoglu, S.; Block, S.T.; Kusano, Y.; Tsai, J.M.; Amirtharajah, R.; Horsley, D.A. Monolithic Piezoelectric Aluminum Nitride MEMS-CMOS Microphone. In Proceedings of the 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 414–417. [Google Scholar]
- Schneider, M.; Pfusterschmied, G.; Patocka, F.; Schmid, U. High performance piezoelectric AlN MEMS resonators for precise sensing in liquids. E I Elektrotech. Inf. 2020, 137, 121–127. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Cai, Y.; Zhang, Y.; Tovstopyat, A.; Liu, S.; Sun, C. Materials, Design, and Characteristics of Bulk Acoustic Wave Resonator: A Review. Micromachines 2020, 11, 630. [Google Scholar] [CrossRef] [PubMed]
- Piazza, G.; Felmetsger, V.; Muralt, P.; Olsson, R.H.; Ruby, R. Piezoelectric aluminum nitride thin films for microelectromechanical systems. MRS Bull. 2012, 37, 1051–1061. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Ho, C.P.; Zhu, S.; Fu, Y.H.; Zhu, Y.; Lee, L.Y.T. Aluminium nitride integrated photonics: A review. Nanophotonics 2021, 10, 2347–2387. [Google Scholar] [CrossRef]
- Kaajakari, V. Practical MEMS; Small Gear Publishing: Las Vegas, NV, USA, 2009. [Google Scholar]
- Cowen, A.; Hames, G.; Glukh, K.; Hardy, B. PiezoMUMPs™ Design Handbook; MEMSCAP Inc.: Durham, NC, USA, 2014. [Google Scholar]
- Analog Devices. 24-Bit Capacitance-to-Digital Converter with Temperature Sensor; Analog Devices: Cambridge, MA, USA, 2007. [Google Scholar]
- Chen, S.H.; Michael, A.; Kwok, C.Y. A Fast Response MEMS Piezoelectric Microlens Actuator with Large Stroke and Low Driving Voltage. In Proceedings of the 2018 IEEE 13th Annual International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Singapore, 22–26 April 2018; pp. 199–203. [Google Scholar]
- An, Z.; Men, C.; Xu, Z.; Chu, P.K.; Lin, C. Electrical properties of AlN thin films prepared by ion beam enhanced deposition. Surf. Coat. Technol. 2005, 196, 130–134. [Google Scholar] [CrossRef]
- Mahameed, R.; Sinha, N.; Pisani, M.B.; Piazza, G. Dual-beam actuation of piezoelectric AlN RF MEMS switches monolithically integrated with AlN contour-mode resonators. J. Micromech. Microeng. 2008, 18, 105011. [Google Scholar] [CrossRef] [Green Version]
- Ullmann, P.G.; Bretthauer, C.; Schneider, M.; Schmid, U. Stress analysis of circular membrane-type MEMS microphones with piezoelectric read-out. Sens. Actuators A Phys. 2023, 349, 114003. [Google Scholar] [CrossRef]
- Gabrelian, A.; Ross, G.; Bespalova, K.; Paulasto-Kröckel, M. Unlocking the Potential of Piezoelectric Films Grown on Vertical Surfaces for Inertial MEMS. Mater. Today Commun. 2022, 33, 104522. [Google Scholar] [CrossRef]
- Qu, Y.; Luo, T.; Wen, Z.; Wei, M.; Gu, X.; Chen, X.; Zou, Y.; Cai, Y.; Liu, Y.; Sun, C. Aluminum Nitride-Based Adjustable Effective Electromechanical Coupling Coefficient Film Bulk Acoustic Resonator. Micromachines 2023, 14, 157. [Google Scholar] [CrossRef]
- Jiang, W.; Mayor, F.; Patel, R.; McKenna, T.; Sarabalis, C.; Safavi-Naeini, A. Nanobenders as efficient piezoelectric actuators for widely tunable nanophotonics at CMOS-level voltages. Commun. Phys. 2020, 3, 156. [Google Scholar] [CrossRef]
- Ghosh, S. Piezoelectric Acousto-Optical Modulation in Aluminum Nitride for Integrated RF-Photonics. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2015. [Google Scholar]
- Stanfield, P.R.; Leenheer, A.J.; Michael, C.P.; Sims, R.; Eichenfield, M. CMOS-compatible, piezo-optomechanically tunable photonics for visible wavelengths and cryogenic temperatures. Opt. Express 2019, 27, 28588–28605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sinha, N.; Wabiszewski, G.E.; Mahameed, R.; Felmetsger, V.V.; Tanner, S.M.; Carpick, R.W.; Piazza, G. Piezoelectric aluminum nitride nanoelectromechanical actuators. Appl. Phys. Lett. 2009, 95, 053106. [Google Scholar] [CrossRef] [Green Version]
- Krupa, K. Opto-Numerical Analysis of AIN Piezoelectric Thin Film Operating as an Actuation Layer in MEMS Cantilevers. Ph.D. Thesis, Université de Franche-Comté, Besançon, France, 2009. [Google Scholar]
- Sinha, N.; Wabiszewski, G.; Mahameed, R.; Felmetsger, V.; Tanner, S.; Carpick, R.; Piazza, G. Ultra Thin AlN Piezoelectric Nano-Actuators. In Proceedings of the Transducers 2009—2009 International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layers | Height Difference (μm) | |
|---|---|---|
| Design Rules Value | Measured Value | |
| Device layer to oxide | 0.2 | 0.16 ± 0.06 |
| Device layer to piezoelectric layer | 0.7 | 0.58 ± 0.06 |
| Device layer to metal | 1.72 | 1.54 ± 0.06 |
| Die | Resonant Frequency (kHz) | Error% | ||
|---|---|---|---|---|
| Mode 1 | Mode 3 | Mode 1 | Mode 3 | |
| D1 | 7.841 | 13.586 | 0.714 | 4.534 |
| D2 | 7.992 | 13.772 | 2.590 | 5.823 |
| D3 | 7.722 | 13.492 | 0.816 | 3.869 |
| Simulation | 7.785 | 12.970 | ||
| Application | Actuation Voltage (V) | Displacement (μm) | Ref. |
|---|---|---|---|
| RF switch | 25 | 0.65 | [54] |
| Logic applications | 6 | 0.12 | [61] |
| General use | 120 | 0.21 | [62] |
| Low-power logic | 6 | 0.07 | [63] |
| Phase shifting | 2 | 1.25 × 10−4 | [60] |
| Tuning optical resonance | 3 | 0.18 | [58] |
| Alignment | 60 | 1.30 | This work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rabih, A.A.S.; Kazemi, M.; Ménard, M.; Nabki, F. Aluminum Nitride Out-of-Plane Piezoelectric MEMS Actuators. Micromachines 2023, 14, 700. https://doi.org/10.3390/mi14030700
Rabih AAS, Kazemi M, Ménard M, Nabki F. Aluminum Nitride Out-of-Plane Piezoelectric MEMS Actuators. Micromachines. 2023; 14(3):700. https://doi.org/10.3390/mi14030700
Chicago/Turabian StyleRabih, Almur A. S., Mohammad Kazemi, Michaël Ménard, and Frederic Nabki. 2023. "Aluminum Nitride Out-of-Plane Piezoelectric MEMS Actuators" Micromachines 14, no. 3: 700. https://doi.org/10.3390/mi14030700